Problem 1.
advertisement

TLT-5400/5406 DIGITAL TRANSMISSION, Exercise 6, Spring 2016
Problem 1.
a) Signal model: Yk = Ak + Nk. Since the only source of degradation is
additive white Gaussian noise, the ML detector can operate
independently on each observation. It will perform a threshold test with
the threshold set in the middle of the symbol values. In the binary
(0 and 1) case, the threshold is at 0.5 and the detected sequence is then
{1 , 1 , 1 , 0}.
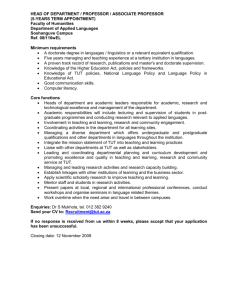
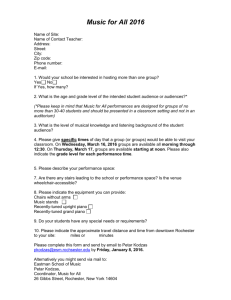
b) Signal model: Yk = Ak + 0.5Ak–1 + Nk = Sk + Nk. In this case, the memory
of the channel is one binary symbol, so there are two possible state
values 0 and 1. The state transition diagram and one stage of the
corresponding trellis are given in the following Figure. The arcs are
labeled with noise-free (input,output) = (Ak, Sk) pairs.
(0,0.0)
(0,0.0)
0
(1,1.0)
0
(0,0.5)
(1,1.0)
1
(0,0.5)
0
(1,1.5)
1
state transition diagram
(1,1.5)
1
one stage of the trellis diagram
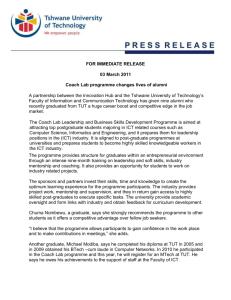
The complete trellis corresponding to the given observed sequence is
given in the next page. The arcs are labeled with the Euclidian branch
weights |Yk – Sk|2.
© Mikko Valkama / TUT
1 / 13
TLT-5400/5406 DIGITAL TRANSMISSION, Exercise 6, Spring 2016
0.81
0.36
1.69
0
0.01
0.09
0.16
0.64
0.16
1
y0 = 0.6
0.09
0
0.04
0.36
0.04
y1 = 0.9
y2 = 1.3
1
y3 = 0.3
Now, the maximum likelihood estimate of the input sequence corresponds to the path which has the lowest
cumulative path metric. It could be found just by "looking" at the trellis in this kind of a simple situation but
we'll use the Viterbi algorithm (important) to find it. The idea is that at each time instant, only the path with
the lowest path metric entering a specific node has to be stored for further processing. In the end, we have
then only one surviving path which corresponds to the ML estimate of the input sequence.
In the following, the surviving paths and their cumulative path metrics after each observation are presented.
© Mikko Valkama / TUT
2 / 13
TLT-5400/5406 DIGITAL TRANSMISSION, Exercise 6, Spring 2016
0.32
0.37
1.01
0.41 (there is also another
possibility, either one is
equally good selection !)
© Mikko Valkama / TUT
3 / 13
TLT-5400/5406 DIGITAL TRANSMISSION, Exercise 6, Spring 2016
0.45
This final surviving path corresponds to input bit sequence {0 , 1 , 1 , 0} which is different from the decision
of part a) where we assumed that only additive white Gaussian noise was disturbing the observations. The
knowledge of ISI, if present, is of course useful.
In this example, there is also another path with the same total path metric of 0.45. This corresponds to the
input sequence {1 , 0 , 1 , 0} (path metric is 0.16 + 0.16 + 0.09 + 0.04 = 0.45). This is an equally valid
estimate of the input sequence in the ML sense. Sometimes this kind of situations occur, and in the Viterbi
algorithm, we just have to choose in favor of one specific path.
© Mikko Valkama / TUT
4 / 13
TLT-5400/5406 DIGITAL TRANSMISSION, Exercise 6, Spring 2016
Problem 2.
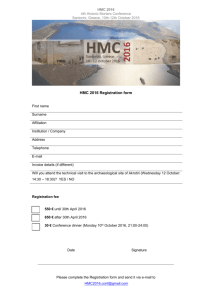
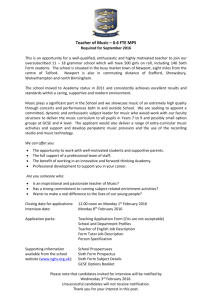
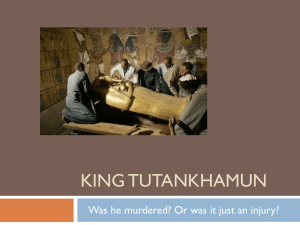
The shift register model and the state transition diagram are shown in the
following. In the state transition diagram, the arcs are labeled with the
input/output pairs (Ak, Sk). The memory of the channel is now 2 binary
symbols, so we have 4 state values 00 , 01 , 10 , 11 (state = {Ak–1 , Ak–2}).
Ak
Ak-1
z –1
Ak-2
z –1
Nk
Yk
Sk
Ak – 0.5Ak-1 + 0.1Ak-2
Fig. 1: Shift-register model.
(0,0.0)
0,0
(0,0.1)
0,1
(1,1.1)
(1,1.0)
(0,-0.4)
(0,-0.5)
1,0
(1,0.5)
1,1
(1,0.6)
Fig. 2: State transition diagram.
© Mikko Valkama / TUT
5 / 13
TLT-5400/5406 DIGITAL TRANSMISSION, Exercise 6, Spring 2016
One stage of the trellis diagram corresponding to the previous situation is
presented next. Make sure you understand how these diagrams are
obtained and what do they represent (both the state-transition diagram and
the trellis diagram contain exactly the same information).
(0,0.0)
0,0
0,0
(0,0.1)
(1,1.0)
0,1
0,1
(1,1.1)
(0,-0.5)
1,0
(0,-0.4)
1,0
(1,0.5)
1,1
(1,0.6)
1,1
Fig. 3: One stage of the trellis diagram.
In the following page, the full trellis corresponding to the given observed
sequence is presented with Euclidian branch weights |Yk – Sk|2.
© Mikko Valkama / TUT
6 / 13
TLT-5400/5406 DIGITAL TRANSMISSION, Exercise 6, Spring 2016
0,0
0.04
0.25
0.81
0.64
0.25
1.44
0,1
0.09
0.01
1.44
1.21
0,0
0.00
0.01
0
0
0
,0.04
,
,
1
1
2.89
0,1
1
1.96
1,0
1
1
2.56
1.69
,
,
0
0.49
0.09
© Mikko Valkama / TUT
0
0.16
1,1
y0 = 0.5
1,0
y1 = -0.2
y2 = 0.9
7 / 13
1
1
,
,
1
y3 = 1.2
y4 = 0.1
1
1,1
TLT-5400/5406 DIGITAL TRANSMISSION, Exercise 6, Spring 2016
Next, each step of the Viterbi algorithm with only the "surviving" paths and their cumulative path metrics are
presented.
0.25
0
0
,
,
,
0
0
0
0
0.29
0.34
1.69
1 0.25
,
0
1
,
© Mikko Valkama / TUT
8 / 13
1
0.74
TLT-5400/5406 DIGITAL TRANSMISSION, Exercise 6, Spring 2016
0
0
,
,
0
0
0.98
2.43
0
,
1
0.30
1
,
0
1 0.83
,
1
© Mikko Valkama / TUT
9 / 13
TLT-5400/5406 DIGITAL TRANSMISSION, Exercise 6, Spring 2016
0
0
0
,
,
,
0
0
0
0
0
,
,
1
1
2.42
3.19
Why don't we have any
entries at all in these
nodes any more ?
1
,
1
© Mikko Valkama / TUT
10 / 13
TLT-5400/5406 DIGITAL TRANSMISSION, Exercise 6, Spring 2016
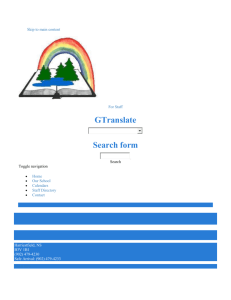
Final surviving path:
0,0
0,1
0
0
0
0
,
,
,
,
0
0
0
0
2.43
0,0
0,1
0
,
1
1,0
1,0
1,1
1
,
1
© Mikko Valkama / TUT
11 / 13
1,1
TLT-5400/5406 DIGITAL TRANSMISSION, Exercise 6, Spring 2016
This path corresponds to an input bit sequence of { 1 , 0 , 0 , 0 , 0 }. Then, this is indeed the ML decision
sequence. General Summary: We are transmitting a sequence of symbols Ak and our observation model is
given by
Yk = Ak – 0.5Ak–1 + 0.1Ak–2 + Nk
This can be written as
Y k = S k + Nk
( k = 0, …, sequence length )
Let Y, S and N represent the corresponding vectors containing the sequence samples. Notice that the
consecutive samples Sk (entries of S) are not independent. Then, the principle of maximum likelihood
detection says that the best estimate of S (in the ML sense) is given by
2
Sˆ ML arg min Y S
S
This corresponds to finding the lowest-weight path through the complete trellis diagram and is done
iteratively by the Viterbi algorithm. Notice that since Ak are discrete-valued, also Sk are discrete-valued and
there really is only a finite set of vectors S.
© Mikko Valkama / TUT
12 / 13
TLT-5400/5406 DIGITAL TRANSMISSION, Exercise 6, Spring 2016
Possible values of Sk depend on the channel model and are represented by the state diagram. In our case, the
estimate of S is given by (calculated with Viterbi in the previous pages)
{ 1.0 , -0.5 , 0.1 , 0.0 , 0.0 }
which indeed has the distance of (0.5-1)2 + (-0.2+0.5)2 +(0.9-0.1)2 +(1.2-0.0)2 +(0.1-0.0)2 = 0.25 + 0.09 +
0.64 + 1.44 + 0.01 = 2.43 to the observed sequence { 0.5 , -0.2 , 0.9 , 1.2 , 0.1 }. Our ultimate goal is, of
course, to detect the actual transmitted symbol sequence. This, however, can be determined by the detected S
or equivalently by the corresponding detected state transitions. The actual detected input sequence in our
case is then
{ 1 , 0 , 0 , 0 , 0 }.
Make sure you understand this idea !
(Similar techniques will be used also in decoding convolutional codes later on.)
© Mikko Valkama / TUT
13 / 13