Log Incomplete Response
Experimental testing: Is a system really first-order?
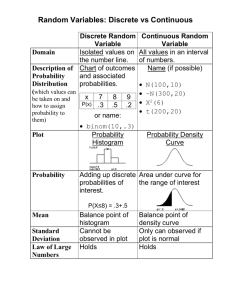
Suppose we run an experiment to acquire a step response of a system, and the result looks like
Fig. 1. We suspect the system may be first-order, we estimate the time constant from the 63.2%
mark, and we use this time constant to mathematically model the system and predict its behavior.
ym
t
Fig. 1: Experimental step response (from System Dynamics by Doebelin).
In the following discussion, we develop a method for determining how close such a system is to
being truly first-order, and if it is, determining a best estimate of its time constant using all the
experimental data, not just the one data point at the 63.2% mark.
Step response
Suppose we apply a step input u to a system
and we measure the output ym and time t so
that we have a set of n+1 points for ym as
follows:
Taking the loge of both sides yields
y y ss
t
.
ln m
y y ss
0
(5)
Z (t )
Time t
t(0)
t(1)
Output ym ym(0) ym(1)
…
…
t(n)
ym(n)
The model of a first-order system is
y y Gu(t ),
(1)
where is the time constant and G is the static
gain. The solution to this ODE (with a step
input of magnitude A) is given by
t
y (t ) y ss y 0 y ss e ,
(2)
where yss = GA. If the system is first order,
then the experimental data ought to satisfy
y m (t ) y ss y 0 y ss e
t
(3)
Here’s how we check. We manipulate (3) to
obtain
t
ym yss
e
(4)
y0 yss
and we designate the left-hand side Z, called
the logarithm of the incomplete-response,
y yss
.
Z (t ) ln m
(6)
y0 yss
We compute Z(t) from the experimental data.
The ideal Z is a linear function of t with a
slope of .
Procedure: Given experimental step response
data ym, estimate the time constant (est) from
the 63.2% point. From the experimental data,
extract the first 4est values of t and ym. Use
(6) to compute Z(t). Plot Z(t), and perform a
linear curve fit. Fig. 2 shows a representative
plot. The closer a linear curve fits the data, the
closer the system is to being first order with a
time constant equal to the negative inverse
of the slope of the fitted curve. Conversely, if
the plot of Z is clearly not a straight line, then
the system is not first order and (1) is not a
good model.
Z(t)
t
Fig. 2: Curve-fit to a plot of Z(t) (from System Dynamics by Doebelin).
IC response
A similar approach can be used when we have
experimental data from an initial-condition
response (or an impulse response). Suppose
we give a system an initial condition y0 and
measure the output ym and time t so that we
have a set of n+1 points for ym as follows:
…
…
Time t
t(0)
t(1)
Output ym ym(0) ym(1)
t(n)
ym(n)
The model of a first-order system is
y y 0,
(7)
where is the time constant. The response is
given by
y (t ) y 0 e
t
(8)
If the experimental system is first order, then
the experimental data ought to satisfy
y m (t ) y0 e
t
(9)
Following a procedure like the one for the step
response, we get an expression for Z given by
y (t )
Z (t ) ln m .
(10)
y0
Again, compute Z(t) from the experimental
data and compare it to the ideal
Z(t) = (t/).
Again, the ideal Z is a linear function of t with
a slope of .
Procedure: Given experimental IC-response
ym, estimate the time constant (est) from the
63.2% point. Extract the first 4est values of t
and ym from the experimental data. Use (10)
to compute the log incomplete-response Z(t),
plot Z(t), and perform a linear curve fit.
Figure 2 shows a representative plot. The
closer a linear curve fits the data, the closer the
system is to being first order with a time
constant equal to the negative inverse of the
slope of the fitted curve. Conversely, if the
plot of Z is clearly not a straight line, then the
system is not first order and (7) is not a good
model.
Name_____________________________
Return to CM __________
Name_____________________________
Lesson 19 Exercise
Problem 1 For the step-response data given below, compute and plot the log incomplete response Z(t).
Plot a linear curve-fit and determine the time constant.
Time (s)
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
5.5
6.0
6.5
7.0
7.5
8.0
8.5
9.0
ym (in)
0.00
0.97
1.79
2.35
2.83
3.15
3.37
3.53
3.73
3.82
3.91
3.98
4.03
4.06
4.06
4.09
4.13
4.14
4.13
Procedure
Create a Matlab m-file for this exercise. Assign the data in the
table to a time vector t and a displacement vector y.
Plot y(t) as individual data points. Do not “connect the dots.”
Use subplot(211).
Estimate y0 and yss. Assign them to variables in your m-file.
Compute and plot Z(t) as individual data points. The Matlab
function for the natural logarithm is log. Use subplot(212).
Perform a linear least-squares curve fit for Z(t). Matlab
functions for doing this are described below. Plot the linear
curve fit as a line on the same graph as Z.
Determine the time constant from the slope of Z.
Attach your plots, properly labeled, to this worksheet and turn it
in at the end of the period.
Question Is the system first-order? Discuss how you might
quantify your answer.
Polynomial curve-fitting in Matlab
Given vectors t and x(t) and an integer value for n,
the command
producing xfit , the fitted curve. To plot both on
the same graph, use, e.g.,
p = polyfit(t,x,n)
plot(t,x,’o’,t,xfit,’-’)
computes the coefficients of a polynomial p(t) of
order n that fits the data x(t) such that
xfit (t ) p1t n p2t n 1 ... pnt pn 1 .
The command
xfit = polyval(p,t)
evaluates the polynomial p at the values of t,
A linear least-squares curve fit is first-order, that
is, n = 1. Thus, for a linear curve-fit, the polyfit
command produces the vector p = [p1 p2] such that
xfit (t ) p1t p2 .
It follows that p1 is the slope of the curve and p2 is
the intercept.
Lesson 19 Exercise
Problem 2 Consider the step response and the log incomplete response plot shown in Fig. 1.
Log-incomplete-response Z(t)
Possible first-order step response
Step response (in)
5
4
3
2
1
0
0
5
Time (s)
10
(a) Step response of unknown system.
0
Z(t)
-0.2
-0.4
linear
fit to
Z(t)
-0.6
-0.8
-1
0
5
Time (s)
10
(b) Log-incomplete response.
Fig. 1: Example of a log incomplete response plot
for a system that is not first-order.
Question Explain why we can conclude the system that produced this response is not 1st-order even
though at first glance it appears it might be 1st-order.
Question Suppose a system with the transfer function given below, when subjected to a unit step input,
produces the response shown in Fig. 1(a). Rewrite the transfer function in standard form and explain why
Fig. 1(a) has the appearance it does.
Transfer function:
8.4
s 1s 2
 0
0