ES=30
advertisement

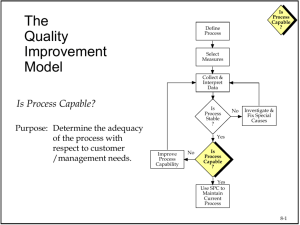
Quantitative Review III Chapter 6 and 6S Statistical Process Control Control Charts for Variable Data (length, width, etc.) • Mean (x-bar) charts – Tracks the central tendency (the average or mean value observed) over time • Range (R) charts: – Tracks the spread of the distribution over time (estimates the observed variation) x-Bar Computations x-bar = sample average x1 x 2 ... x n x k UCLx x z x LCLx x z x x n x x = standard deviation of the sample means n “n” here equals # of observations in each sample x1 x 2 ... x n x k z “k” here = # of samples = standard normal variable or the # of std. deviations desired to use to develop the control limits Assume the standard deviation of the process is given as 1.13 ounces Management wants a 3-sigma chart (only 0.26% chance of alpha error) Observed values shown in the table are in ounces. Calculate the UCL and LCL. Sample 1 Sample 2 Sample 3 Observation 1 15.8 16.1 16.0 Observation 2 16.0 16.0 15.9 Observation 3 15.8 15.8 15.9 Observation 4 15.9 15.9 15.8 Sample means 15.875 15.975 15.9 A. B. C. D. E. 18.56, 16.32 16.22, 18.56 17.62, 14.23 19.01, 12.56 18.33, 14.28 0 15.875 15.975 15.9 x 3 x 15.9167 1.13 1.13 x .565 2 4 UCL 15.9167 3x.565 17.62ounces LCL 15.9167 3x.565 14.23ounces Inspectors want to develop process control charts to measure the weight of crates of wood. Data (in pounds) from three samples are: Sample Crate 1 Crate 2 Crate 3 Sample Means 1 18 38 22 26 2 26 24 28 26 3 26 26 26 26 What are the upper and lower control limits for this process? Z=3 x = 4.27 26 26 26 x 3 x 26 4.27 4.27 x 2.135 2 4 UCL 26 3x 2.135 32.4 LCL 26 3x 2.135 19.6 Range or R Chart UCLR D4 R, LCLR D3 R k = # of sample ranges R R k Range Chart measures the dispersion or variance of the process while The X Bar chart measures the central tendency of the process. When selecting D4 and D3 use sample size or number of observations for n. Control Chart Factors Sample Size (n) 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Factors for R-Chart D4 D3 0.00 3.27 0.00 2.57 0.00 2.28 0.00 2.11 0.00 2.00 0.08 1.92 0.14 1.86 0.18 1.82 0.22 1.78 0.26 1.74 0.28 1.72 0.31 1.69 0.33 1.67 0.35 1.65 Example Sample 1 Sample 2 Sample 3 Observation 1 15.8 16.1 16.0 Observation 2 16.0 16.0 15.9 Observation 3 15.8 15.8 15.9 Observation 4 15.9 15.9 15.8 Sample means 15.875 15.975 15.9 Sample ranges 16.0-15.8=0.2 16.1-15.8=0.3 16.0-15.8=0.2 R-chart Computations (Use D3 & D4 Factors: Table 6-1) 0 .2 0 .3 0 .2 R .233 3 UCLR RD4 .2332.28 .531 LCLR RD3 .2330 0 Ten samples of 5 observations each have been taken form a Soft drink bottling plant in order to test for volume dispersion in the bottling process. The average sample range was found To be .5 ounces. Develop control limits for the sample range. A. B. C. D. E. .996, -.320 1.233, 0 1.055, 0 .788, 1.201 1.4, 0 UCLR RD4 2.11.5 1.055 LCLR RD3 0.5 0 (P) Fraction Defective Chart • Used for yes or no type judgments (acceptable/not acceptable, works/doesn’t work, on time/late, etc.) • p = proportion of nonconforming items p = average proportion of nonconforming items (P) Fraction Defective Chart totalnumber of defects p , totalnumber of units sampled("k"times"n") p p(1 p) n n = # of observations in each sample UCL p p z p , LCL p p z p z = standard normal variable or the # of std. deviations desired to use to develop the control limits K = number of samples P-Chart Example: A Production manager for a tire company has inspected the number of defective tires in five random samples with 20 tires in each sample. The table below shows the number of defective tires in each sample of 20 tires. Z= 3. Calculate the control limits. Sample Number of Defective Tires Number of Tires in each Sample Proportion Defective 1 3 20 .15 2 2 20 .10 3 1 20 .05 4 2 20 .10 p(1 p) (.09)(.91) σp 0.064 n 20 5 1 20 .05 Total 9 100 .09 UCLp p zσ .09 3(.064) .282 • Solution: p # Defectives 9 .09 T otalInspected 100 LCLp p zσ .09 3(.064) .102 0 Note: Lower control limit can’t be negative. Number-of-Defectives or C Chart Used when looking at # of defects c = # of defects c = average # of defects per sample Number-of-Defectives or C Chart number of incidentsobserved c , c c number of samples(k) UCLc c z c , LCLc c z c z = standard normal variable or the # of std. deviations desired to use to develop the control limits C-Chart Example: The number of weekly customer complaints are monitored in a large hotel using a c-chart. Develop three sigma control limits using the data table below. Z=3. Week Number of Complaints 1 3 2 2 3 3 4 1 5 3 6 3 7 2 8 1 9 3 10 1 Total 22 • Solution: _ # complaints 22 c 2.2 # of samples 10 UCLc c z c 2.2 3 2.2 6.65 LCLc c z c 2.2 3 2.2 2.25 0 Process Capability Index • Can a process or system meet it’s requirements? product's design specification range USL - LSL Cp 6 standarddeviationsof theproductionsystem 6 Cp < 1: process not capable of meeting design specs Cp ≥ 1: process capable of meeting design specs One shortcoming, Cp assumes that the process is centered on the specification range Process Capability • Product Specifications – Preset product or service dimensions, tolerances – e.g. bottle fill might be 16 oz. ±.2 oz. (15.8oz.-16.2oz.) – Based on how product is to be used or what the customer expects • Process Capability – Cp and Cpk – Assessing capability involves evaluating process variability relative to preset product or service specifications – Cp assumes that the process is centered in the specification range spe cificat ion width USL LSL Cp proce ss width 6σ – Cpk helps to address a possible lack of centering of the process USL μ μ LSL C pk min , 3σ 3σ USL μ μ LSL C pk min , 3σ 3σ min = minimum of the two If = mu or mean of the process C pk Is less than 1, then the process is not capable or is not centered. Capability Indexes • Centered Process (Cp): specification width USL LSL Cp processwidth 6 • Any Process (Cpk): USL LSL C pk min ; 3 3 Cp=Cpk when process is centered Example • Design specifications call for a target value of 16.0 +/-0.2 ounces (USL = 16.2 & LSL = 15.8) • Observed process output has a mean of 15.9 and a standard deviation of 0.1 ounces Computations • C p: • Cpk: USL LSL 16.2 15.8 0.4 Cp 0.66 6 60.1 0.6 C pk LSL USL min or 3 3 16.2 15.9 15.9 15.8 min or 30.1 30.1 0. 3 0. 1 min or min1 or 0.33 0.33 0.3 0.3 Chapter 3 Project Mgt. and Waiting Line Theory Critical Path Method (CPM) • CPM is an approach to scheduling and controlling project activities. • The critical path is the sequence of activities that take the longest time and defines the total project completion time. • Rule 1: EF = ES + Time to complete activity • Rule 2: the ES time for an activity equals the largest EF time of all immediate predecessors. • Rule 3: LS = LF – Time to complete activity • Rule 4: the LF time for an activity is the smallest LS of all immediate successors. Example Activity A B C D E F G H I J K Description Develop product specifications Design manufacturing process Source & purchase materials Source & purchase tooling & equipment Receive & install tooling & equipment Receive materials Pilot production run Evaluate product design Evaluate process performance Write documentation report Transition to manufacturing Immediate Predecessor None A A B D C E&F G G H&I J Duration (weeks) 4 6 3 6 14 5 2 2 3 4 2 CPM Diagram Add Activity Durations Identify Unique Paths Calculate Path Durations Paths ABDEGHJK ABDEGIJK ACFGHJK ACFGIJK Path duration 40 41 22 23 • The longest path (ABDEGIJK) limits the project’s duration (project cannot finish in less time than its longest path) • ABDEGIJK is the project’s critical path Adding Feeder Buffers to Critical Chains • The theory of constraints, the basis for critical chains, focuses on keeping bottlenecks busy. • Time buffers can be put between bottlenecks in the critical path • These feeder buffers protect the critical path from delays in noncritical paths ES=10 ES=16 EF=16 EF=30 LS=16 LS=10 E Buffer LF=16 LF=30 ES=4 EF=10 LS=4 LF=10 B(6) D(6) E(14) A(4) ES=0 EF=4 LS=0 LF=4 ES=32 EF=34 LS=33 LF=35 H(2) G(2) C(3) ES=4 EF=7 LS=22 LF=25 F(5) ES=7 EF=12 LS=25 LF=30 ES=30 EF=32 LS=30 LF=32 I(3) ES=32 EF=35 LS=32 LF=35 ES=35 EF=39 LS=35 LF=39 ES=39 EF=41 LS=39 LF=41 J(4) K(2) Critical Path Some Network Definitions • All activities on the critical path have zero slack • Slack defines how long non-critical activities can be delayed without delaying the project • Slack = the activity’s late finish minus its early finish (or its late start minus its early start) • Earliest Start (ES) = the earliest finish of the immediately preceding activity • Earliest Finish (EF) = is the ES plus the activity time • Latest Start (LS) and Latest Finish (LF) depend on whether or not the activity is on the critical path ES=4+6=10 EF=10 LS=4 LF=10 ES=16 EF=30 ES=10 EF=16 B(6) D(6) E(14) Latest EF H(2) = Next ES ES=35 EF=39 ES=39 EF=41 G(2) J(4) K(2) A(4) ES=0 EF=4 LS=0 LF=4 C(3) ES=4 EF=7 LS=22 LF=25 ES=32 EF=34 F(5) ES=7 EF=12 LS=25 LF=30 ES=30 EF=32 LS=30 LF=32 I(3) ES=32 EF=35 LS=32 LF=35 Calculate Early Starts & Finishes ES=16 EF=30 LS=16 LF=30 ES=10 EF=16 LS=10 LF=16 ES=4 EF=10 LS=4 LF=10 B(6) D(6) E(14) H(2) 39-4=35 ES=35 EF=39 LS=35 LF=39 Earliest LS G(2) = Next LF J(4) A(4) ES=0 EF=4 ES=32 EF=34 LS=33 LF=35 C(3) ES=4 EF=7 LS=22 LF=25 F(5) ES=7 EF=12 LS=25 LF=30 ES=30 EF=32 I(3) LS=30 LF=32 ES=32 EF=35 LS=32 LF=35 ES=39 EF=41 LS=39 LF=41 K(2) Calculate Late Starts & Finishes Activity Slack Time TES = earliest start time for activity TLS = latest start time for activity TEF = earliest finish time for activity TLF = latest finish time for activity Activity Slack = TLS - TES = TLF - TEF Calculate Activity Slack Activity A B C D E F G H I J K Late Finish 4 10 25 16 30 30 32 35 35 39 41 Early Finish 4 10 7 16 30 12 32 34 35 39 41 Slack (weeks) 0 0 18 0 0 18 0 1 0 0 0 Waiting Line Models Arrival & Service Patterns • Arrival rate: – The average number of customers arriving per time period • Service rate: – The average number of customers that can be serviced during the same period of time Infinite Population, Single-Server, Single Line, Single Phase Formulae lam bda m eanarrival rate m u m eanservice rate averagesystem utilization L averagenum berof custom ersin system Infinite Population, Single-Server, Single Line, Single Phase Formulae LQ L averagenum berof custom ersin line 1 W averagetim e in system includingservice WQ W averagetim e spent waiting in line Example • A help desk in the computer lab serves students on a first-come, first served basis. On average, 15 students need help every hour. The help desk can serve an average of 20 students per hour. • Based on this description, we know: – Mu = 20 (exponential distribution) – Lambda = 15 (Poisson distribution) Average Utilization 15 0.75 or 75% 20 Average Number of Students in the System 15 L 3 students 20 15 Average Number of Students Waiting in Line LQ L 0.753 2.25 students Average Time a Student Spends in the System 1 1 W 20 15 .2 hours or 12 minutes Average Time a Student Spends Waiting (Before Service) WQ W 0.750.2 0.15 hours or 9 minutes Too long? After 5 minutes people get anxious Consider a single-line, single-server waiting line system. Suppose that customers arrive according to a Poisson distribution at an average rate of 60 per hour, and the average (exponentially distributed) service time is 45 seconds per customer. What is the average number of customers in the system? A. B. C. D. E. 2.25 3 4 3.25 4.25 L 60/80-60 =3