Matrix Decomposition and its Application in Statistics
advertisement

Matrix Decomposition and its
Application in Statistics
Nishith Kumar
Lecturer
Department of Statistics
Begum Rokeya University, Rangpur.
Email: nk.bru09@gmail.com
1
Overview
•
•
•
•
•
•
•
•
Introduction
LU decomposition
QR decomposition
Cholesky decomposition
Jordan Decomposition
Spectral decomposition
Singular value decomposition
Applications
2
Introduction
This Lecture covers relevant matrix decompositions, basic
numerical methods, its computation and some of its applications.
Decompositions provide a numerically stable way to solve
a system of linear equations, as shown already in
[Wampler, 1970], and to invert a matrix. Additionally, they
provide an important tool for analyzing the numerical stability of
a system.
Some of most frequently used decompositions are the LU, QR,
Cholesky, Jordan, Spectral decomposition and Singular value
decompositions.
3
Easy to solve system (Cont.)
Some linear system that can be easily solved
The solution:
b1 / a11
b / a
2 22
b
/
a
n nn
4
Easy to solve system (Cont.)
Lower triangular matrix:
Solution: This system is solved using forward substitution
5
Easy to solve system (Cont.)
Upper Triangular Matrix:
Solution: This system is solved using Backward substitution
6
LU Decomposition
LU decomposition was originally derived as a decomposition of quadratic
and bilinear forms. Lagrange, in the very first paper in his collected works(
1759) derives the algorithm we call Gaussian elimination. Later Turing
introduced the LU decomposition of a matrix in 1948 that is used to solve the
system of linear equation.
Let A be a m × m with nonsingular square matrix. Then there exists two
matrices L and U such that, where L is a lower triangular matrix and U is an
upper triangular matrix.
u11 u12
0 u
22
U
0
0
Where,
u1m
u 2 m
u mm
A LU
and
l11
l
L 21
l m1
0
l 22
lm2
0
0
l mm
J-L Lagrange
A. M. Turing
(1736 –1813)
(1912-1954)
7
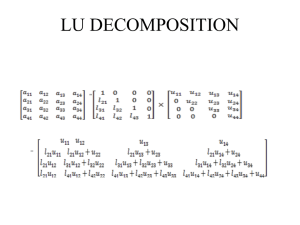
How to decompose A=LU?
A … U (upper triangular)
U = Ek E1 A
A = (E1)-1 (Ek)-1 U
6 - 2 2
A 12 - 8 6 Now,
3 - 13 2
0
6 - 2 2 1
0 - 4 2 - 2 1
0 - 12 1 - 1 / 2 0
6 - 2 2 1 0
0 - 4 2 0 1
0 0 - 5 0 - 3
U
0 6 - 2 2
0 12 - 8 6
1 3 - 13 2
0 1
0 0 6 - 2 2
0 - 2 1 0 12 - 8 6
1 - 1 / 2 0 1 3 - 13 2
E2
E1
A
If each such elementary matrix Ei is a lower triangular matrices,
it can be proved that (E1)-1, , (Ek)-1 are lower triangular, and
(E1)-1 (Ek)-1 is a lower triangular matrix.
Let L=(E1)-1 (Ek)-1 then A=LU.
8
Calculation of L and U (cont.)
1
6 - 2 2
A 12 - 8 6 = 0
0
3 - 13 2
0
1
0
0 6 - 2 2
0 12 - 8 6
1 3 - 13 2
Now reducing the first column we have
6 - 2 2 1
0 - 4 2 - 2
0 - 12 1 - 1 / 2
6 - 2 2 1
0 - 4 2 0
0 0 - 5 0
0 0 6 - 2 2
1 0 12 - 8 6
0 1 3 - 13 2
0 0 1
0 0 6 - 2 2
1 0 - 2 1 0 12 - 8 6
- 3 1 - 1 / 2 0 1 3 - 13 2
9
Calculation of L and U (cont.)
Now
-1
-1
0 0 1 0 0
1
1 0 0 1 0 0 1 0 0
- 2 1 0 0 1 0 2 1 0 0 1 0 2 1 0
- 1 / 2 0 1 0 - 3 1
1 / 2 0 1 0 3 1 1 / 2 3 1
Therefore,
6 - 2 2
A 12 - 8 6
3 - 13 2
=
1 0 0
2 1 0
1 / 2 3 1
6 - 2 2
0 - 4 2
0 0 - 5
=LU
If A is a Non singular matrix then for each L (lower triangular matrix) the
upper triangular matrix is unique but an LU decomposition is not unique.
There can be more than one such LU decomposition for a matrix. Such as
6 - 2 2
A 12 - 8 6
3 - 13 2
6 0 0 1 - 2 / 6 2 / 6
= 12 1 0 0 - 4 2
3 3 1 0
0
- 5
=LU
10
Calculation
Calculationof
ofLLand
and U
U (cont.)
(cont.)
Thus LU decomposition is not unique. Since we compute LU
decomposition by elementary transformation so if we change
L then U will be changed such that A=LU
To find out the unique LU decomposition, it is necessary to
put some restriction on L and U matrices. For example, we can
require the lower triangular matrix L to be a unit one (i.e. set
all the entries of its main diagonal to ones).
LU Decomposition in R:
• library(Matrix)
• x<-matrix(c(3,2,1, 9,3,4,4,2,5 ),ncol=3,nrow=3)
• expand(lu(x))
11
Calculation of L and U (cont.)
• Note: there are also generalizations of LU to non-square and singular
matrices, such as rank revealing LU factorization.
• [Pan, C.T. (2000). On the existence and computation of rank revealing LU
factorizations. Linear Algebra and its Applications, 316: 199-222.
• Miranian, L. and Gu, M. (2003). Strong rank revealing LU factorizations.
Linear Algebra and its Applications, 367: 1-16.]
• Uses: The LU decomposition is most commonly used in the solution of
systems of simultaneous linear equations. We can also find determinant
easily by using LU decomposition (Product of the diagonal element of
upper and lower triangular matrix).
12
Solving system of linear equation
using LU decomposition
Suppose we would like to solve a m×m system AX = b. Then we can find
a LU-decomposition for A, then to solve AX =b, it is enough to solve the
systems
Thus the system LY = b can be solved by the method of forward
substitution and the system UX = Y can be solved by the method of
backward substitution. To illustrate, we give some examples
Consider the given system AX = b, where
6 - 2 2
A 12 - 8 6
3 - 13 2
and
8
b 14
- 17
13
Solving system of linear equation
using LU decomposition
We have seen A = LU, where
1 0 0
L 2 1 0
1 / 2 3 1
6 - 2 2
U 0 - 4 2
0 0 - 5
Thus, to solve AX = b, we first solve LY = b by forward substitution
1 0 0 y1 8
2 1 0 y 14
2
1 / 2 3 1 y 3 - 17
Then
y1 8
Y y 2 - 2
y 3 - 15
14
Solving system of linear equation
using LU decomposition
Now, we solve UX =Y by backward substitution
6 - 2 2 x1 8
0 - 4 2 x - 2
2
0 0 - 5 x3 - 15
then
x1
1
x 2
2
x3
3
15
QR Decomposition
Jørgen Pedersen Gram
(1850 –1916)
Firstly QR decomposition
originated with Gram(1883).
Later Erhard Schmidt (1907)
proved the QR Decomposition
Theorem
Erhard Schmidt
(1876-1959)
If A is a m×n matrix with linearly independent columns, then A can be
decomposed as , A QR where Q is a m×n matrix whose columns
form an orthonormal basis for the column space of A and R is an
nonsingular upper triangular matrix.
16
QR-Decomposition (Cont.)
Theorem : If A is a m×n matrix with linearly independent columns, then
A can be decomposed as , A QR where Q is a m×n matrix whose
columns form an orthonormal basis for the column space of A and R is an
nonsingular upper triangular matrix.
Proof: Suppose A=[u1 | u2| . . . | un] and rank (A) = n.
Apply the Gram-Schmidt process to {u1, u2 , . . . ,un} and the
orthogonal vectors v1, v2 , . . . ,vn are
vi u i -
Let
vi
qi
vi
u i , v1
v1
2
v1 -
ui , v2
v2
2
v2 - -
u i , vi -1
vi -1
2
vi -1
for i=1,2,. . ., n. Thus q1, q2 , . . . ,qn form a orthonormal
basis for the column space of A.
17
QR-Decomposition (Cont.)
Now,
u i vi
u i , v1
v1
2
v1
ui , v2
v2
2
v2
u i , vi -1
vi -1
2
vi -1
ui vi qi ui , q1 q1 ui , q2 q2 ui , qi-1 qi-1
i.e.,
ui span{v1 , v2 ,, vi } span{qi , q2 ,qi }
Thus ui is orthogonal to qj for j>i;
u1 v1 q1
u 2 v 2 q 2 u 2 , q1 q1
u 3 v3 q3 u 3 , q1 q1 u 3 , q 2 q 2
u n v n q n u n , q1 q1 u n , q 2 q 2 u n , q n -1 q n -1
18
QR-Decomposition (Cont.)
Let Q= [q1 q2 . . . qn] , so Q is a m×n matrix whose columns form an
orthonormal basis for the column space of A .
Now,
A u1 u 2 u n q1 q 2
i.e., A=QR.
Where,
v1
0
R 0
0
u 2 , q1
v2
0
0
v1
0
q n 0
0
u 3 , q1
u3 , q2
v3
0
0
u 2 , q1
v2
0
0
u n , q1
u n , q2
u n , q3
vn
u 3 , q1
u3 , q2
v3
0
u n , q1
u n , q2
u n , q3
0
vn
Thus A can be decomposed as A=QR , where R is an upper triangular and
nonsingular matrix.
19
QR Decomposition
Example: Find the QR decomposition of
1 - 1 - 1
1 0 0
A
1 - 1 0
0 0 - 1
20
Calculation of QR Decomposition
Applying Gram-Schmidt process of computing QR decomposition
1st Step: r a 3
11
1
q1
2nd Step:
3rd Step:
1
a1
1
3
1
3
a1
3
1
0
r12 q1T a2 - 2
3
1 3 - 1 / 3
- 1
1 3 2 / 3
0
T
qˆ 2 a 2 - q1 q1 a 2 a 2 - q1 r12 - ( -2 / 3 )
- 1/ 3
-1
1
3
0
0 0
r22 qˆ 2
23
- 1/ 6
23
1
q2
qˆ 2
qˆ 2
- 1/ 6
0
21
Calculation of QR Decomposition
4th Step:
5th Step:
r13 q1T a3 - 1 3
r23 q2T a3 1 6
6th Step:
- 1/ 2
0
qˆ 3 a3 - q1 q1T a3 - q 2 q 2T a3 a3 - r13 q1 - r23 q 2
1/ 2
-1
r33 qˆ 3 6 / 2
- 1/ 6
0
1
q3
qˆ 3
qˆ 3
1/ 6
- 2/ 6
22
Calculation of QR Decomposition
Therefore, A=QR
1 - 1 - 1 1 / 3 - 1 / 6
1 0 0
1 / 3 2 / 6
1 - 1 0 1 / 3 - 1 / 6
0
0
1
0
0
- 1/ 6
3 - 2 / 3 - 1/ 3
0
0
2
/
6
1
/
6
1/ 6
0
6 / 2
0
- 2 / 6
R code for QR Decomposition:
x<-matrix(c(1,2,3, 2,5,4, 3,4,9),ncol=3,nrow=3)
qrstr <- qr(x)
Q<-qr.Q(qrstr)
R<-qr.R(qrstr)
Uses: QR decomposition is widely used in computer codes to find the
eigenvalues of a matrix, to solve linear systems, and to find least squares
approximations.
23
Least square solution using QR
Decomposition
The least square solution of b is
X X b X Y
t
t
Let X=QR. Then
X X b QR QRb R Q QRb R Rb
t
t
t
t
t
X Y RQY
t
Therefore,
t
R Rb R Q Y R
t
t
t
t -1
t
R Rb R
t
t -1
R t Qt Y Rb Qt Y Z
24
Cholesky Decomposition
Cholesky died from wounds received on the battle field on 31 August 1918
at 5 o'clock in the morning in the North of France. After his death one of
his fellow officers, Commandant Benoit, published Cholesky's method of
computing solutions to the normal equations for some least squares data
fitting problems published in the Bulletin géodesique in 1924. Which is
known as Cholesky Decomposition
Cholesky Decomposition: If A is a real, symmetric and positive definite
matrix then there exists a unique lower triangular matrix L with positive
diagonal element such that A LLT.
Andre-Louis Cholesky
1875-1918
25
Cholesky Decomposition
Theorem: If A is a n×n real, symmetric and positive definite matrix then
there exists a unique lower triangular matrix G with positive diagonal
element such that A GGT .
Proof: Since A is a n×n real and positive definite so it has a LU
decomposition, A=LU. Also let the lower triangular matrix L to be a unit
one (i.e. set all the entries of its main diagonal to ones). So in that case LU
decomposition is unique. Let us suppose D diag(u11 , u22 ,, unn )
observe that M T D -1U . is a unit upper triangular matrix.
Thus, A=LDMT .Since A is Symmetric so, A=AT . i.e., LDMT =MDLT.
From the uniqueness we have L=M. So, A=LDLT . Since A is positive
definite so all diagonal elements of D are positive. Let G L diag( d , d ,,
then we can write A=GGT.
11
22
26
d nn )
Cholesky Decomposition (Cont.)
Procedure To find out the cholesky decomposition
a11 a12 a1n
Suppose
a
A 21
a n1
We need to solve
the equation
a 22
an2
a 2 n
a nn
a11 a12
a a
A 21 22
an1 an 2
a1n l11 0 0 l11 l 21 l n1
a2 n l 21 l 22 0 0 l 22 l n 2
ann l n1 l n 2 l nn 0 0 l nn
L
LT
27
Example of Cholesky Decomposition
Suppose
For k from 1 to n 1 / 2
k -1
l kk a kk - l ks2
s 1
2 - 2
4
A 2 10 2
- 2 2
5
Then Cholesky Decomposition
For j from k+1 to n
k -1
l jk a jk - l js l ks l kk
s 1
Now,
2 0
L 1 3
- 1 1
0
0
3
28
R code for Cholesky Decomposition
• x<-matrix(c(4,2,-2, 2,10,2, -2,2,5),ncol=3,nrow=3)
• cl<-chol(x)
• If we Decompose A as LDLT then
0 0
1
L 1 / 2
1 0
- 1 / 2 1 / 3 1
and
4 0 0
D 0 9 0
0 0 3
29
Application of Cholesky
Decomposition
Cholesky Decomposition is used to solve the system
of linear equation Ax=b, where A is real symmetric
and positive definite.
In regression analysis it could be used to estimate the
parameter if XTX is positive definite.
In Kernel principal component analysis, Cholesky
decomposition is also used (Weiya Shi; Yue-Fei
Guo; 2010)
30
Characteristic Roots and
Characteristics Vectors
Any nonzero vector x is said to be a characteristic vector of a matrix A, If
there exist a number λ such that Ax= λx;
Where A is a square matrix, also then λ is said to be a characteristic root of
the matrix A corresponding to the characteristic vector x.
Characteristic root is unique but characteristic vector is not unique.
We calculate characteristics root λ from the characteristic equation |A- λI|=0
For λ= λi the characteristics vector is the solution of x from the following
homogeneous system of linear equation (A- λiI)x=0
Theorem: If A is a real symmetric matrix and λi and λj are two distinct latent
root of A then the corresponding latent vector xi and xj are orthogonal.
31
Multiplicity
Algebraic Multiplicity: The number of repetitions of a certain
eigenvalue. If, for a certain matrix, λ={3,3,4}, then the
algebraic multiplicity of 3 would be 2 (as it appears twice) and
the algebraic multiplicity of 4 would be 1 (as it appears once).
This type of multiplicity is normally represented by the Greek
letter α, where α(λi) represents the algebraic multiplicity of λi.
Geometric Multiplicity: the geometric multiplicity of an
eigenvalue is the number of linearly independent eigenvectors
associated with it.
32
Jordan Decomposition
Camille Jordan (1870)
• Let A be any n×n matrix then there exists a nonsingular matrix P and JK(λ)
a k×k matrix form
1 0 0
0 1 0
J k ( )
0 0 0
Such that
J k1 (1 )
0
P -1 AP
0
J k2 (2 )
0
0
0 J kr (r )
0
0
Camille Jordan
(1838-1921)
where k1+k2+ … + kr =n. Also λi , i=1,2,. . ., r are the characteristic roots
And ki are the algebraic multiplicity of λi ,
Jordan Decomposition is used in Differential equation and time series analysis. 33
Spectral Decomposition
A. L. Cauchy established the Spectral
Decomposition in 1829.
CAUCHY, A.L.(1789-1857)
Let A be a m × m real symmetric matrix. Then
there exists an orthogonal matrix P such that
T
P T AP or A PP , where Λ is a diagonal
matrix.
34
Spectral Decomposition and
Principal component Analysis (Cont.)
By using spectral decomposition we can write
A PPT
In multivariate analysis our data is a matrix. Suppose our data is
X matrix. Suppose X is mean centered i.e., X ( X - )
and the variance covariance matrix is ∑. The variance covariance
matrix ∑ is real and symmetric.
Using spectral decomposition we can write ∑=PΛPT . Where Λ is
a diagonal matrix. diag(1, 2 ,, n )
Also
1 2 n
tr(∑) = Total variation of Data =tr(Λ)
35
Spectral Decomposition and
Principal component Analysis (Cont.)
The Principal component transformation is the transformation
Y=(X-µ)P
Where,
E(Yi)=0
V(Yi)=λi
Cov(Yi ,Yj)=0 if i ≠ j
V(Y1) ≥ V(Y2) ≥ . . . ≥ V(Yn)
n
V (Yi ) tr ()
i 1
n
V (Y )
i
i 1
36
R code for Spectral Decomposition
x<-matrix(c(1,2,3, 2,5,4, 3,4,9),ncol=3,nrow=3)
eigen(x)
Application:
For Data Reduction.
Image Processing and Compression.
K-Selection for K-means clustering
Multivariate Outliers Detection
Noise Filtering
Trend detection in the observations.
37
Historical background of SVD
There are five mathematicians who were responsible for establishing the existence of the
singular value decomposition and developing its theory.
Eugenio Beltrami
(1835-1899)
Camille Jordan
(1838-1921)
James Joseph
Sylvester
(1814-1897)
Erhard Schmidt
(1876-1959)
Hermann Weyl
(1885-1955)
The Singular Value Decomposition was originally developed by two mathematician in the
mid to late 1800’s
1. Eugenio Beltrami , 2.Camille Jordan
Several other mathematicians took part in the final developments of the SVD including James
Joseph Sylvester, Erhard Schmidt and Hermann Weyl who studied the SVD into the mid-1900’s.
C.Eckart and G. Young prove low rank approximation of SVD (1936).
38
C.Eckart
What is SVD?
Any real (m×n) matrix X, where (n≤ m), can be
decomposed,
X = UΛVT
U is a (m×n) column orthonormal matrix (UTU=I),
containing the eigenvectors of the symmetric matrix
XXT.
Λ is a (n×n ) diagonal matrix, containing the singular
values of matrix X. The number of non zero diagonal
elements of Λ corresponds to the rank of X.
VT is a (n×n ) row orthonormal matrix (VTV=I),
containing the eigenvectors of the symmetric matrix
XTX.
39
Singular Value Decomposition (Cont.)
Theorem (Singular Value Decomposition) : Let X be m×n of rank
r, r ≤ n ≤ m. Then there exist matrices U , V and a diagonal
matrix Λ , with positive diagonal elements such that, X UV T
Proof: Since X is m × n of rank r, r ≤ n ≤ m. So XXT and XTX both
of rank r ( by using the concept of Grammian matrix ) and of
dimension m × m and n × n respectively. Since XXT is real
symmetric matrix so we can write by spectral decomposition,
XX T QDQT
Where Q and D are respectively, the matrices of characteristic
vectors and corresponding characteristic roots of XXT.
Again since XTX is real symmetric matrix so we can write by
spectral decomposition,
X T X RMR T
40
Singular Value Decomposition (Cont.)
Where R is the (orthogonal) matrix of characteristic vectors and M
is diagonal matrix of the corresponding characteristic roots.
Since XXT and XTX are both of rank r, only r of their characteristic
roots are positive, the remaining being zero. Hence we can
write,
Dr
D
0
Also we can write,
0
0
M r
M
0
0
0
41
Singular Value Decomposition (Cont.)
We know that the nonzero characteristic roots of XXT and XTX are
equal so Dr M r
Partition Q, R conformably with D and M, respectively
i.e., Q (Qr , Q* ) ; R (R , R ) such that Qr is m × r , Rr is n × r and
correspond respectively to the nonzero characteristic roots of
XXT and XTX. Now take
r
*
U Qr
V Rr
1/ 2
r
D
diag(d
1/ 2
1
,d
1/ 2
2
,, d r
1/ 2
)
Where d i , i 1,2,, r are the positive characteristic roots of
XXT and hence those of XTX as well (by using the concept of 42
grammian matrix.)
Singular Value Decomposition (Cont.)
Now define, S Qr Dr1/ 2 Rr T
Now we shall show that S=X thus completing the proof.
S T S (Qr Dr
1/ 2
T
Rr ) T Qr Dr
1/ 2
Rr
T
Rr Dr1 / 2 QrT Qr Dr1 / 2 RrT
Rr Dr Rr
T
Rr M r Rr
T
RMRT
XTX
SS T XX T
Similarly,
From the first relation above we conclude that for an arbitrary orthogonal matrix,
S P1 X
say P1 ,
While from the second we conclude that for an arbitrary orthogonal matrix, say P2
43
We must have S XP2
Singular Value Decomposition (Cont.)
The preceding, however, implies that for arbitrary orthogonal
matrices P1 , P2 the matrix X satisfies
XX T P1 XX T P1 ,
T
Which in turn implies that,
Thus
X T X P2T X T XP2
P1 I m ,
P2 I n
X S Qr Dr1 / 2 RrT UV T
44
R Code for Singular Value Decomposition
x<-matrix(c(1,2,3, 2,5,4, 3,4,9),ncol=3,nrow=3)
sv<-svd(x)
D<-sv$d
U<-sv$u
V<-sv$v
45
Decomposition in Diagram
Matrix A
Full column rank
Lu decomposition
Not always unique
QR Decomposition
Rectangular
Square
Symmetric
Asymmetric
AM>GM
AM=GM
PD
Cholesky
Decomposition
Spectral
Decomposition
Jordan
Decomposition
SVD
Similar
Diagonalization
P-1AP=Λ
46
Properties Of SVD
Rewriting the SVD
A UV
where
r
T
ui i viT
i 1
r = rank of A
λi = the i-th diagonal element of Λ.
ui and vi are the i-th columns of U and V
respectively.
47
Proprieties of SVD
Low rank Approximation
Theorem: If A=UΛVT is the SVD of A and the
singular values are sorted as 1 2 ,n
then for any l <r, the best rank-l approximation
to A is ~
l
r
T
~2
A
ui i vi ; A - A i2
i 1
i l 1
Low rank approximation technique is very much
important for data compression.
48
Low-rank Approximation
• SVD can be used to compute optimal low-rank
approximations.
• Approximation of A is à of rank k such that
~
A
Min
X :rank ( X ) k
A- X
F
Frobenius norm
A
m
a
i 1 j 1
If d1 , d2 ,, d n are the characteristics roots of
à and X are both mn matrices.
ATA
then
A
2
2
n
ij
n
di
i 1
49
Low-rank Approximation
• Solution via SVD
~
A U diag(1 ,...,k ,0,...,0)V T
set smallest r-k
singular values to zero
* * *
* * *
* * *
* * *
* * *
* * *
* * * * * *
* * *
* * *
* * *
* * *
* * *
VT
X
U
K=2
k
~
A i 1 i u i viT
column notation: sum
of rank 1 matrices
50
Approximation error
• How good (bad) is this approximation?
• It’s the best possible, measured by the Frobenius norm of the
error:
r
min
X :rank ( X ) k
A- X
2
F
~
A- A
2
F
i k 1
2
i
• where the λi are ordered such that λi λi+1.
Now
~
A- A
2
F
51
Row approximation and column
approximation
Suppose Ri and cj represent the i-th row and j-th column of A. The SVD
~
of A and A is
A UV
T
r
u
k 1
The SVD equation for Ri is
We can approximate Ri by
where i = 1,…,m.
k
k v
k 1
Ri
R
Also the SVD equation for Cj is,
where j = 1, 2, …, n
l
~
T
A U l lVl uk k vkT
T
k
l
i
r
u
k 1
ik
l
u
k 1
ik
k vk
k vk
;
l<r
r
C j v jk k u k
k 1
l
We can also approximate Cj by
C v jk k u k
l
j
k 1
; l<r
52
Least square solution in inconsistent
system
By using SVD we can solve the inconsistent system.This gives the
least square solution. min
2
x
Ax - b
The least square solution
where Ag be the MP inverse of A.
53
The SVD of Ag is
This can be written as
Where
54
Basic Results of SVD
55
SVD based PCA
If we reduced variable by using SVD then it performs like PCA.
Suppose X is a mean centered data matrix, Then
X using SVD, X=UΛVT
we can write- XV = UΛ
Suppose Y = XV = UΛ
Then the first columns of Y represents the first
principal component score and so on.
o SVD Based PC is more Numerically Stable.
o If no. of variables is greater than no. of observations then SVD based PCA will
give efficient result(Antti Niemistö, Statistical Analysis of Gene Expression
Microarray Data,2005)
56
Application of SVD
Data Reduction both variables and observations.
Solving linear least square Problems
Image Processing and Compression.
K-Selection for K-means clustering
Multivariate Outliers Detection
Noise Filtering
Trend detection in the observations and the variables.
57
Origin of biplot
Gabriel (1971)
One of the most
important advances in
data analysis in recent
decades
Currently…
> 50,000 web pages
Numerous academic
publications
Included in most
statistical analysis
packages
Prof. Ruben Gabriel, “The founder of biplot”
Courtesy of Prof. Purificación Galindo
University of Salamanca, Spain
Still a very new
technique to most
scientists
58
What is a biplot?
• “Biplot” = “bi” + “plot”
– “plot”
• scatter plot of two rows OR of two columns, or
• scatter plot summarizing the rows OR the columns
– “bi”
• BOTH rows AND columns
• 1 biplot >> 2 plots
59
Practical definition of a biplot
“Any two-way table can be analyzed using a 2D-biplot as soon as it can be
sufficiently approximated by a rank-2 matrix.” (Gabriel, 1971)
(Now 3D-biplots are also possible…)
5
Matrix decomposition
E1
4
G2
3
P(4, 3)
e3
x
y
e1 e2 e3
20 - 9
6
3
g1 4
g 2 - 3 3 x 2 - 3 3
6
12 - 15
- 10 - 6
9
g 3 1 - 3 y 4 1 - 2
g 4 4
8
- 12 12
0
e1
g1
g2
g3
g4
E(2, 3)
2
e2
E2
1
Y
G(3, 2)
G1
0
G4
O
-1
E3
-2
G3
-3
G-by-E table
-4
-4
-3
-2
-1
0
1
2
3
4
X
60
5
Singular Value Decomposition (SVD) &
Singular Value Partitioning (SVP)
The ‘rank’ of Y, i.e.,
the minimum number
of PC required to
fully represent Y
Matrix
characterising
the rows
“Singular values”
Matrix
characterising
the columns
r
SVD:
X ij
uik k vkj
SVD
k 1
r
SVP:
Common uses value
of f
(uik )(
SVP
1- f
k
f
k
k 1
f=1
vkj )
f=0
f=1/2
Rows scores
Plot
Column scores
Biplot
Plot
61
Biplot
The simplest biplot is to show the first two PCs together with the
projections of the axes of the original variables
x-axis represents the scores for the first principal component
Y-axis the scores for the second principal component.
The original variables are represented by arrows which
graphically indicate the proportion of the original variance
explained by the first two principal components.
The direction of the arrows indicates the relative loadings on
the first and second principal components.
Biplot analysis can help to understand the multivariate data
i) Graphically
ii) Effectively
iii) Conveniently.
62
Biplot of Iris Data
0
0.0
10
10
33
333 333
Sepal L.
33 33
2
22
3
22223 3 3
333
2 3
3 3 3
2 233 3 3
Petal W.
Petal L.
2
3
33 23
2222 3
222 22 233 33
2 2 22 333
22 323
222
3 3 3
2
22 22
3
22
2
2 22 3
23
2
2
2
2
5
3
0
1
5
-5
111
1
111
1
1
11 1
1 11111
11
1
1
1
1
11 1
1
11
1
1
1 11
1 11
1
11
1
0.1
-0.1
0.2
1
Sepal W.
1
1 1
-0.2
Comp. 2
1= Setosa
2= Versicolor
3= Virginica
-5
-10
-10
2
-0.2
-0.1
0.0
Comp. 1
0.1
0.2
63
Image Compression Example
Pansy Flower image, collected from
http://www.ats.ucla.edu/stat/r/code/pansy.jpg
This image is 600×465 pixels
64
Singular values of flowers image
Plot of the singular values
65
Low rank Approximation to flowers image
Rank-1 approximation
Rank- 5 approximation
66
Low rank Approximation to flowers image
Rank-20 approximation
Rank-30 approximation
67
Low rank Approximation to flowers image
Rank-50 approximation
Rank-80 approximation
68
Low rank Approximation to flowers image
Rank-100 approximation
Rank-120 approximation
69
Low rank Approximation to flowers image
Rank-150 approximation
True Image
70
Outlier Detection Using SVD
Nishith and Nasser (2007,MSc. Thesis) propose a graphical
method of outliers detection using SVD.
It is suitable for both general multivariate data and regression
data. For this we construct the scatter plots of first two PC’s,
and first PC and third PC. We also make a box in the scatter
plot whose range lies
median(1stPC) ± 3 × mad(1stPC) in the X-axis and
median(2ndPC/3rdPC) ± 3 × mad(2ndPC/3rdPC) in the Yaxis.
Where mad = median absolute deviation.
The points that are outside the box can be considered as
extreme outliers. The points outside one side of the box is
termed as outliers. Along with the box we may construct
another smaller box bounded by 2.5/2 MAD line
71
Outlier Detection Using SVD (Cont.)
HAWKINS-BRADU-KASS
(1984) DATA
Data set containing 75 observations
with 14 influential observations.
Among them there are ten high
leverage outliers (cases 1-10)
and for high leverage points
(cases 11-14) -Imon (2005).
Scatter plot of Hawkins, Bradu and kass data (a) scatter plot of first two PC’s and
(b) scatter plot of first and third PC.
72
Outlier Detection Using SVD (Cont.)
MODIFIED BROWN DATA
Data set given by Brown (1980).
Ryan (1997) pointed out that the
original data on the 53 patients
which contains 1 outlier
(observation number 24).
Scatter plot of modified Brown data (a) scatter plot of first
two PC’s and (b) scatter plot of first and third PC.
Imon and Hadi(2005) modified
this data set by putting two more
outliers as cases 54 and 55.
Also they showed that observations
24, 54 and 55 are outliers by using
generalized standardized
Pearson residual (GSPR) 73
Cluster Detection Using SVD
Singular Value Decomposition is also used for cluster
detection (Nishith, Nasser and Suboron, 2011).
The methods for clustering data using first three
PC’s are given below,
median (1st PC) ± k × mad (1st PC) in the X-axis
and median (2nd PC/3rd PC) ± k × mad (2nd
PC/3rd PC) in the Y-axis.
Where mad = median absolute deviation. The value of
k = 1, 2, 3.
74
75
Principals stations in climate data
76
Climatic Variables
The climatic variables are,
1.
Rainfall (RF) mm
2.
Daily mean temperature (T-MEAN)0C
3.
Maximum temperature (T-MAX)0C
4.
Minimum temperature (T-MIN)0C
5.
Day-time temperature (T-DAY)0C
6.
Night-time temperature (T-NIGHT)0C
7.
Daily mean water vapor pressure (VP) MBAR
8.
Daily mean wind speed (WS) m/sec
9.
Hours of bright sunshine as percentage of maximum possible sunshine
hours (MPS)%
10. Solar radiation (SR) cal/cm2/day
77
Consequences of SVD
Generally many missing values may present in the data. It may also contain
unusual observations. Both types of problem can not handle Classical singular
value decomposition.
Robust singular value decomposition can solve both types of problems.
Robust singular value decomposition can be obtained by alternating L1
regression approach (Douglas M. Hawkins, Li Liu, and S. Stanley Young,
(2001)).
78
The Alternating L1 Regression Algorithm for Robust Singular Value
Decomposition.
There is no obvious choice of
the initial values of u 1
Initialize the leading
left singular vector
u1
Fit the L1 regression coefficient cj by
n
minimizing
xij - c j u i1 ;
i
1
j=1,2,…,p
Calculate the resulting estimate of
the left eigenvector ui=d/ ║d║
Calculate right singular vector v1=c/║c║
, where ║.║ refers to Euclidean norm.
Again fit the L1 regression coefficient
di by minimizing
p
x
j 1
ij
- d i v j1
; i=1,2,….,n
Iterate this process untill it converge.
For the second and subsequent of the SVD, we replaced X by a deflated matrix 79
obtained by subtracting the most recently found them in the SVD X
X-λkukvkT
Clustering weather stations on Map
Using RSVD
80
References
•
•
•
•
•
•
Brown B.W., Jr. (1980). Prediction analysis for binary data. in
Biostatistics Casebook, R.G. Miller, Jr., B. Efron, B. W. Brown, Jr., L.E.
Moses (Eds.), New York: Wiley.
Dhrymes, Phoebus J. (1984), Mathematics for Econometrics, 2nd ed.
Springer Verlag, New York.
Hawkins D. M., Bradu D. and Kass G.V.(1984),Location of several
outliers in multiple regression data using elemental sets. Technometrics,
20, 197-208.
Imon A. H. M. R. (2005). Identifying multiple influential observations in
linear Regression. Journal of Applied Statistics 32, 73 – 90.
Kumar, N. , Nasser, M., and Sarker, S.C., 2011. “A New Singular Value
Decomposition Based Robust Graphical Clustering Technique and Its
Application in Climatic Data” Journal of Geography and Geology,
Canadian Center of Science and Education , Vol-3, No. 1, 227-238.
Ryan T.P. (1997). Modern Regression Methods, Wiley, New York.
•
Stewart, G.W. (1998). Matrix Algorithms, Vol 1. Basic
Decompositions, Siam, Philadelphia.
•
Matrix Decomposition. http://fedc.wiwi.huberlin.de/xplore/ebooks/html/csa/node36.html
81
82