Reflection
advertisement

Breaking It Down Is Better
Haptic Decomposition of Complex Movements Aids in RobotAssisted Motor Learning
J. Klein, S. Spencer, & D. Reinkensmeyer
IEEE Transactions on Neural Systems and Rehabilitation Engineering
May 2012
Motivation – Klein et al.
• sports training
• rehab from neurologic injury
– stroke
– spinal-cord injury
Motivation – CHARM
• stroke rehab (Michele, Mike)
• needle-steering training (Ann)
• robot-assisted surgery (Ilana)
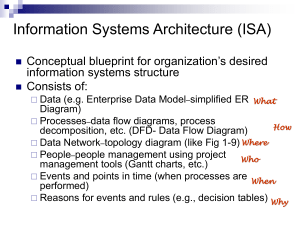
Background
HAPTIC GUIDANCE
• of questionable effectiveness
• to date, been used almost
exclusively to demonstrate
entire movements
“PART-WHOLE” TRANSFER
• sequential vs. continuous tasks
• effectiveness correlated with
coordination requirements
shoulder rotation
desired
trajectory
elbow
flexion/extension
Hypothesis
“Decomposing” a movement into fewer-DOF
components is more effective than training the
movement as a whole. Moreover, the degree of
effectiveness is dependent on the form of the
decomposition.
Methods
4 DOFs
1.
2.
3.
4.
shoulder abduction/adduction
should flexion/extension
shoulder int./ext. rotation
elbow flexion/extension
Methods
2 Motions
1.
2.
“main” (θ) ≈ tennis backhand
transfer (θ’) ≈ front crawl swim
Reflection…
What if the task had
been framed as a goaldirected movement?
That is, what if subjects
had been told: “pretend
you are swinging a
tennis racket”?
Methods
Experimental Protocol
1.
2.
3.
4.
5.
6.
7.
Baseline
Baseline Transfer
Training
Assessment
Assessment Transfer
Retention
Retention Transfer
4 Training Groups
1.
2.
3.
4.
“Whole” (control)
Euler
Anatomical
Visual
Reflection…
Klein et al. randomized
the presentation order
of the joint components
during Training. How
necessary was this
control? Is component
presentation order an
area for further study?
rand{}
Methods
Assessment
“GLOBAL”
* accounting for time delay d
lower score = better learning
“LOCAL”
Reflection…
Why is it necessary to fit
the shift parameter d?
Shouldn’t d simply be
the time between the
assessment start signal
and movement onset? ...
Reflection…
… Are we assuming that
subjects are “playing catch
up” with the virtual arm?
What if, instead of being
shown a virtual arm,
subjects were given binary
feedback (e.g., GREEN vs.
RED) based on their
current performance?
Results
“MAIN”
TRANSFER
Results
• no Baseline differences between
decomposition groups
• all groups significantly improved with Training
• Anatomical decomposition exhibited greatest
improvement during all assessments
– Training – no significant difference compared to “Whole”
– Short-Term – significant compared to all other groups
– Long-Term – only (weakly) significant compared to Visual
Reflection…
Why would there be
greater learning at longterm retention (vs.
short-term retention) for
“Whole”, Euler, and
Visual decompositions*?
Given enough time,
would all groups
equalize?
* Anatomical was approximately the same
Results
• “global” performance correlated with
1. “local” performance
2. proximity of training joint positions to those
required by whole motion
• no improvement for transfer motion haptic
guidance training IS task specific
Discussion
“Part-Whole” Learning
• counterintuitive
• success of Anatomical (vs.
Visual) decomposition
suggests that
spatiotemporal summation
mechanism operates in joint
(vs. visual coordinates)
* see (Kakei et al., 2001)
• NOT generalizable
• more spatial than temporal
Reflection…
I am unconvinced by Klein
et al.’s theory for why
(anatomical) movement
decomposition aids in
learning a target motion
more than practicing the
motion itself. What other
explanations can we
propose?
“One possibility is that the motor system
has trouble determining where the
problems lie in making, accurate, complex
movements; breaking the movements
down may allow better identification and
then more focused practice on key
problems.”
Discussion
“Part-Whole” Learning
Robotic Movement Training
• counterintuitive
• success of Anatomical (vs.
Visual) decomposition
suggests that
spatiotemporal summation
mechanism operates in joint
(vs. visual coordinates)
• opens the door for simpler
robotic devices in rehab
• BUT, benefits of movement
decomposition might only
exist with haptic guidance
* see (Kakei et al., 2001)
• NOT generalizable
• more spatial than temporal
Reflection…
What does this mean for
stroke rehabilitation? Is
there a “whole-part”
mechanism that could
help decouple patients’
abnormal muscle
synergies?
shoulder rotation
desired
trajectory
elbow
flexion/extension
“Breakthrough” or just another
addition to the pool of inconclusive
literature on haptic guidance?