Poster_Abdelazim_Sameh_NOAA_2011 - NOAA-ISET
advertisement

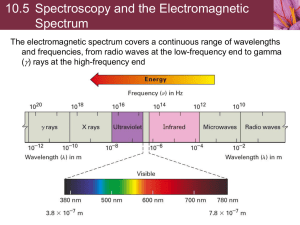
: : Coherent Doppler Lidar for Wind Sensing Sameh Abdelazim, David Santoro, Mark Arend, Fred Moshary, Samir Ahmed Electrical Engineering Department, City College of New York, New York, NY 10031, USA Introduction Wind Measurements Wind Measuring Results Lidar (light detection and ranging) operates using the same concept of microwave RADAR, but it employs a lot higher frequency. In wind speed sensing, CDL (Coherent Doppler Lidar) is used for its eye safety advantage even when the laser power is in the multi-watt range. Heterodyne detection is used to mix the received laser signal (scattered by aerosols) with a local oscillator signal. As a result, the output is an RF signal containing the some information about the wind like: a- Range (obtained from the time of flight.) b- Speed (obtained from frequency shift.) c- Reflectivity (obtained from the signal strength.) d- Aerosols compositions (obtained from polarization state.) The setup shown in fig. 3 was connected to shoot the laser signal into the atmosphere. The power spectrum of the received signal at the different gates is shown at fig. 4 The received signal is time gated, and the FFT is calculated for each gate. Each gate represents scattered signal throughout a range distance in the atmosphere. Since laser travels at the speed of light, then this distance (spatial resolution) could be calculated from the time of the gate according to: D: distance ∆t: gate time t *C C: Speed of D light 2 Power spectrum of received signal in each gate is obtained by calculating the FFT of that signal. According to the number of samples in the FFT frequency resolution is given by: System Overview The system consists of the following components: 1Laser source 2- Modulator 3- Fiber Amplifier 4- Optical Antenna 5- Detector 6- Signal Processor as shown in fig. 1. fs f n ∆f:frequency resolution fs: sampling frequency n: number of samples/gate Fig. 6 SNR Vs. Distance of received signal Fig. 3 Wind measurements experimental setup Fig. 7 Calculated Wind speed Vs. distance Signal Processing Fig. 1 Coherent Doppler Lidar system’s configuration A 1545.2 n.m laser is generated at the laser source, and is transmitted through a single mode fiber. The laser signal is then split using a 50/50 coupler. One signal will be used as a local oscillator (LO), while the other signal is pulsed and frequency shifted using an AOM (acousto-optic modulator). The modulated signal is then amplified and transmitted through an optical antenna. The scattered signal will be received by the optical antenna and mixed with the LO signal through a 50/50 coupler. The mixed signal will be detected by a heterodyne detector, which generates a RF electrical signal as shown in fig. 2(a) and 2(b). The RF analog signal is then digitized using ADC and processed to extract different frequencies, which correspond to wind speeds at different ranges. SNR Analysis SNR was analyzed as a function of distance (L) and aperture diameter (D) for different focus ranges of the laser beam as follows: Fig 2 SNR vs. distance and aperture diameter In order to increase the resolution of wind speed calculations, we curve fit the power spectrum to a Gaussian curve as shown in figures 8a and 8b. This allows us to detect wind speed within a frequency bin. Figure 9 show the advantage of using curve fitting in calculating wind speed Fig 4 Returned signal power spectrum The wind speed can be calculated as shown in fig. 5 from the frequency shift of the scattered signal according to the following equation: 2V f ∆f: is the frequency shift V: wind speed λ: laser wave length Fig 5 Calculated Wind speed Vs. distance Fig. 8a Power spectrum of returned signal Fig. 8b Gaussian curve fitted power spectrum Fig 9 Improvement in wind speed calculation by using Gaussian fitting