Regionlets for Generic Object Detection
advertisement

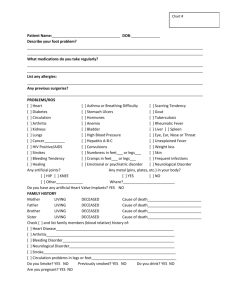
Regionlets for Generic Object Detection Xiaoyu Wang, Ming Yang, Shenghuo Zhu, and Yuanqing Lin NEC Labs America, Inc. Facebook, Inc. ICCV 2013 oral paper Presenter: Ming-Ming Cheng @ VGG reading group, 6/2/2014. Generic object detection Review: rigid vs. deformable Rigid objects Tackles local variations, hardly handle deformations • Classical cascaded AdaBoost • Deformable part models (DPM) • Spatial pyramid matching (SPM) of BoW Deformable objects High deformation tolerance results in imprecise localization or false positives for rigid objects Can we mode both rigid and deformable objects in a unified framework? Review: parameter selection • Deformable Part-based Model (DPM) • Specify the number of deformable parts • Spatial Pyramid Matching • Specify the number of pyramids to build Do we have to pre-define model parameters to handle different degrees of deformation? Review: multi scales/viewpoints • DPM • Resize an image to detect objects at a fixed scale • Multiple models, each deals with one viewpoint • Spatial Pyramid Matching • No need to resize the image • One model, a codebook is used to encode features Can we learn a model that can be easily adapted to arbitrary scales and viewpoints? Review: sliding window vs. selective search • Classical: sliding window • Check hundreds of thousands (if not millions) of sliding windows. • Resize image and detect objects at fixed scale • Needs to use very efficient classifiers • Recent: selective search • Thousands of object-independent candidate regions • [12PAMI] B. Alexe, T. Deselaers, and V. Ferrari, Measuring the objectness of image window. • [13IJCV] K. E. A. Van de Sande, J. R. R. Uijlings, T. Gevers, and A. W. M. Smeulders, Selective search for object recognition • [13PAMI] Ian Endres, and Derek Hoiem, Category-independent object proposals with diverse ranking. • [11ICCV] E. Rahtu, J. Kannala, and M. Blaschko. Learning a category independent object detection cascade. • [11CVPR] Z. Zhang, J. Warrell, and P. H. S. Torr. Proposal generation for object detection using cascaded ranking SVMs. InCVPR, 2011 • Allowing strong classifier, needs to work with arbitrary window size Motivation • A flexible and general object-level representation with • Hassle free deformation handling • Arbitrary scales and aspect ratio handling Detection framework • Generate candidate detection bounding boxes • Boosting classifier cascades Regionlet: Definition • Region (𝑅): feature extraction region • Regionlet (𝑟1 , 𝑟2 , 𝑟3 ): A sub-region in a feature extraction area whose position/resolution are relative and normalized to a detection window Bounding box Region Regionlets Why regionlets? Some part of the region may not be informative or even distractive. Why ‘regionlets’? Regionlet: definition (cont.) • Relative normalized position Regionlet: Feature extraction Regionlet • Constructing the regions/regionlets pool • Small region, fewer regionlets -> fine spatial layout • Large region, more regionlets -> robust to deformation • Use cascaded boosting learning to select the most discriminative regionlets from a largely over-complete pool Regionlet: Training • Construct regionlets pool • Enumerating all possible regions is impractical and not necessary. • Propose a set of regionlets with random positions (up to 5) inside each region with identical size. Regionlet: Training • Constructing the regions/regionlets poolLearning Boosting cascades • 16K region/regionlets candidates for each cascade • Learning of each cascade stops when the error rate is achieved (1% for positive, 37.5% for negative) • Last cascade stops after collecting 5000 weak classifiers • Result in 4-7 cascades • 2-3 hours to finish training one category on a 8-core machine Regionlets: Testing • No image resizing • Any scale, any aspect ratio • Adapt the model size to the same size as the object candidate bounding box Experiments • Datasets • PASCAL VOC 2007, 2010 • 20 object categories • ImageNet Large Scale Object Detection Dataset • 200 object categories • Investigated Features • • • • HOG LBP Covariance Deep Convolutional Neural Network (DCNN) feature (only for the ImageNet challenge) Experiments: PASCAL VOC • Baselines • DPM: excellent at detecting rigid objects. E.g. car, bus, etc. • SS_SPM: for objects with significant global deformations. • E.g. cat, cow sheep, etc. • SPM outperforms DPM in airplane and TV. Due to very diverse viewpoints or rich sub-categories. • Objectness (use old version of DPM): selective search itself dose not benefit detection tool much (0.6% improvement) in terms of accuracy. Experiments: PASCAL VOC • Baselines: • DPM • SPM • Objectness • Regionlets • Won 16 out of 20 categories • ‘To our best knowledge, is the best performance in VOC07’ • Multiple regionlets consistently outperforms single regionlets Experiments: PASCAL VOC Experiments: ImageNet Running speed • 0.2 second per image using a single core if candidate bounding boxes are given, real time(>30 frames per second) using 8 cores • 2 seconds per image to generate candidate bounding boxes • 2-3 hours to finish training one category on a 8-core machine Conclusions • A new object representation for object detection • Non-local max-pooling of regionlets • Relative normalized locations of regionlets • Flexibility to incorporate various types of features • A principled data-driven detection framework, effective in handling deformation, multiple scales, multiple viewpoints • Superior performance with a fast running speed Latest results • Regionlets with Deep CNN feature (outside data) Some really exciting parts during the reading group will be made public valuable after CVPR 2014 results announced, together with source code! My thoughts towards a real-time system • Current bottleneck is object proposal generation • State of the art methods needs 2+ seconds to process one image [IJCV13, PAMI12, PAMI13] • Our recent results Training on VOC: 20s Testing speed: 300fps Generic ability My thoughts towards a real-time system My thoughts towards a real-time system