Lect. 17 CHE 185 – PID CONTROL
advertisement

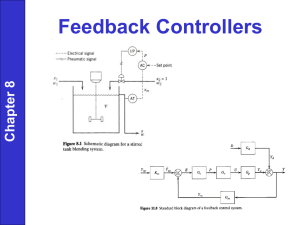
CHE 185 – PROCESS CONTROL AND DYNAMICS PID CONTROLLER FUNDAMENTALS CLOSED LOOP COMPONENTS • GENERAL DEFINITIONS – OPEN LOOPS ARE MANUAL CONTROL – FEEDBACK LOOPS ARE CLOSED • EXAMPLE P&ID FOR FEEDBACK CONTROL LOOP S/P DISPLAY TC TCV T UTILITY FLOW HEAT EXCHANGER CLOSED LOOP COMPONENTS • GENERAL BLOCK DIAGRAM FOR FEEDBACK CONTROL LOOP (FIGURE 7.2.1 FROM TEXT) CLOSED LOOP COMPONENTS • OVERALL TRANSFER FUNCTION Y ( s ) Gd ( s ) D( s ) G p ( s )Gc ( s )Ga ( s ) E ( s ) E ( s ) Ysp ( s ) Ys ( s ) Ysp ( s ) Gs ( s )Y ( s ) Y ( s ) Gd ( s ) D( s ) G p ( s )Gc ( s )Ga ( s )[Ysp ( s ) Gs ( s )Y ( s )] Gd ( s ) D( s ) G p ( s )Gc ( s )Ga ( s )Ysp ( s ) Y ( s) G p ( s )Gc ( s )Ga ( s )Gs ( s ) 1 TYPICAL TRANSFER FUNCTIONS FOR A FEEDBACK LOOP • CONSIDER THE RESPONSE TO A DISTURBANCE • WITH CONSTANT S/P (Ysp(S) = 0) • REGULATORY CONTROL OR DISTURBANCE REJECTION G p ( s )Gc ( s )Ga ( s )Ysp ( s ) Y ( s) G p ( s )Gc ( s )Ga ( s )Gs ( s ) 1 • THIS REPRESENTS A PROCESS AT • STEADY STATE RESPONDING TO • BACKGROUND DISTURBANCES TYPICAL TRANSFER FUNCTIONS FOR A FEEDBACK LOOP • CONSIDER THE SETPOINT RESPONSE • WITH NO DISTURBANCE (D(s) = 0) • SETPOINT TRACKING OR SERVO CONTROL • THIS MODEL REPRESENTS THE SYSTEM RESPONSE TO A S/P ADJUSTMENT TYPICAL TRANSFER FUNCTIONS FOR A FEEDBACK LOOP • GENERALIZATIONS REGARDING THE FORM OF THE TRANSFER FUNCTIONS – THE NUMERATOR IS THE PRODUCT OF ALL TRANSFER FUNCTIONS BETWEEN THE INPUT AND THE OUTPUT – THE DENOMINATOR IS EQUAL TO THE NUMERATOR + 1 TYPICAL TRANSFER FUNCTIONS FOR A FEEDBACK LOOP • CHARACTERISTIC EQUATION – OBTAINED BY SETTING THE DENOMINATOR = 0 – ROOTS FOR THIS EQUATION WILL BE: • OVERDAMPED LOOP • COMPLEX ROOTS, FOR AN OSCILLATORY LOOP • AT LEAST ONE REAL POSITIVE ROOT FOR AN UNSTABLE LOOP FEEDBACK CONTROL ANALYSIS • THE LOOP GAIN (KcKaKpKs) SHOULD BE POSITIVE FOR STABLE FEEDBACK CONTROL. • AN OPEN-LOOP UNSTABLE PROCESS CAN BE MADE STABLE BY APPLYING THE PROPER LEVEL OF FEEDBACK CONTROL. CHARACTERISTIC EQUATION EXAMPLE • CONSIDER THE DYNAMIC BEHAVIOR OF A P-ONLY CONTROLLER APPLIED TO A CST THERMAL MIXER (Kp=1; τp=60 SEC) WHERE THE TEMPERATURE SENSOR HAS A τs=20 SEC AND τa IS ASSUMED SMALL. NOTE THAT Gc(s)=Kc. CHARACTERISTIC EQUATION EXAMPLE- CLOSED LOOP POLES • WHEN Kc =0, POLES ARE -0.05 AND -0.0167 WHICH CORRESPOND TO THE INVERSE OF τp AND τs. • AS Kc IS INCREASED FROM ZERO, THE VALUES OF THE POLES BEGIN TO APPROACH ONE ANOTHER. • CRITICALLY DAMPED BEHAVIOR OCCURS WHEN THE POLES ARE EQUAL. • UNDERDAMPED BEHAVIOR RESULTS WHEN Kc IS INCREASED FURTHER DUE TO THE IMAGINARY COMPONENTS IN THE POLES. PID ALGORITHM POSITION FORM • ISA POSITION FORM FOR PID: • FOR PROPORTIONAL ONLY c( t ) c0 K c e( t ) DEFINITION OF TERMS • e(t) - THE ERROR FROM SETPOINT [e(t)=ysp-ys]. • Kc - THE CONTROLLER GAIN IS A TUNING PARAMETER AND LARGELY DETERMINES THE CONTROLLER AGGRESSIVENESS. • τI - THE RESET TIME IS A TUNING PARAMETER AND DETERMINES THE AMOUNT OF INTEGRAL ACTION. • τD - THE DERIVATIVE TIME IS A TUNING PARAMETER AND DETERMINES THE AMOUNT OF DERIVATIVE ACTION. PID CONTROLLER TRANSFER FUNCTION PID ALGORITHM POSITION FORM • FOR PROPORTIONAL/INTEGRAL: 1 t c( t ) c0 Kc e(t ) e( t )dt 0 I • FOR PROPORTIONAL/DERIVATIVE de( t ) c( t ) c0 Kc e( t ) D dt PID ALGORITHM POSITION FORM • TRANSFER FUNCTION FOR PID CONTROLLER: C( s ) 1 Gc ( s ) Kc e( t ) E( s) I de( t ) 0 e(t )dt D dt t PID ALGORITHM POSITION FORM • DERIVATIVE KICK: – RESULTS FROM AN ERROR SPIKE (INCREASE IN 𝑑𝑒(𝑡) ) WHEN A SETPOINT CHANGE IS INITIATED 𝑑𝑡 – CAN BE ELIMINATED BY REPLACING THE CHANGE IN ERROR WITH A CHANGE IN THE −𝑑𝑦𝑠 (𝑡) CONTROLLED VARIABLE IN THE PID 𝑑𝑡 ALGORITHM – RESULTING EQUATION IS CALLED THE DERIVATIVE-ON-MEASUREMENT FORM OF THE PID ALGORITHM 1 c(t ) c0 Kc e(t ) I dys (t ) 0 e(t )dt D dt t DIGITAL VERSIONS OF THE PID ALGORITHM • DIGITAL CONTROL SYSTEMS REQUIRE CONVERSION OF ANALOG SIGNALS TO DIGITAL SIGNALS FOR PROCESSING. • DIGITAL VERSION OF THE PREVIOUS EQUATION IN DIGITAL FORMAT BASED ON A SINGLE TIME INTERVAL, Δt: YIELDS THE VELOCITY FORM OF THE PID ALGORITHM t e ( t ) e ( t t ) e ( t ) I c( t t ) c( t ) K c D ( y ( t ) 2 y ( t t ) y ( t 2t ) s s t s DIGITAL VERSIONS OF THE PID ALGORITHM • FOR INTEGRATION OVER A TIME PERIOD, t, WHERE n = t/Δt: t n e( t ) e( i * t ) I i 1 c( t ) c( t t ) K c D t ( ys ( t ) ys ( t t ) DIGITAL VERSIONS OF THE PID ALGORITHM • PROPORTIONAL KICK – RESULTS FROM THE INITIAL RESPONSE TO A SETPOINT CHANGE – CAN BE ELIMINATED IN THE VELOCITY EQUATION BY REPLACING THE ERROR TERM IN THE ALGORITHM WITH THE SENSOR TERM t n y s ( t t ) y s ( t ) e( i * t ) I i 1 c( t ) c( t t ) K c D ( y ( t ) y ( t t ) s t s FIRST ORDER PROCESS WITH A PI CONTROLLER EXAMPLE PI CONTROLLER APPLIED TO A SECOND ORDER PROCESS EXAMPLE • PROPORTIONAL ACTION • USES A MULTIPLE OF THE ERROR AS A SIGNAL TO THE CONTROLLER, CONTROLLER GAIN, c Kc ys • HAS INVERSE UNITS TO PROCESS GAIN ys Kp c PROPORTIONAL ACTION PROPERTIES • CLOSED LOOP TRANSFER FUNCTION BASE ON A PONLY CONTROLLER APPLIED TO A FIRST ORDER PROCESS. • PROPERTIES OF P CONTROL – DOES NOT CHANGE ORDER OF PROCESS – CLOSED LOOP TIME CONSTANT IS SMALLER THAN OPEN LOOP τp – DOES NOT ELIMINATE OFFSET. P-ONLY CONTROL OFFSET PROPORTIONAL RESPONSE ACTION WITH A PI CONTROLLER • PROPORTIONAL CONTROL • RESPONSE OF FIRST ORDER PROCESS TO STEP FUNCTION • OPEN LOOP - NO CONTROL t p Ys YSP (1 e ) • CLOSED LOOP - PROPORTIONAL CONTROL t p YSP K c K p 1 Ys (1 e ) Kc K p 1 PROPORTIONAL CONTROL • PROPORTIONAL CONTROL MEANS THE CLOSED SYSTEM RESPONDS QUICKER THAN THE OPEN SYSTEM TO A CHANGE. • OFFSET IS A RESULT OF PROPORTIONAL CONTROL. AS T INCREASES, THE RESULT IS: YSP Ys 1 Ys OR Kc K p 1 YSP Kc K p 1 INTEGRAL ACTION • THE PRIMARY BENEFIT OF INTEGRAL ACTION IS THAT IT REMOVES OFFSET FROM SETPOINT. • IN ADDITION, FOR A PI CONTROLLER ALL THE STEADY-STATE CHANGE IN THE CONTROLLER OUTPUT RESULTS FROM INTEGRAL ACTION. INTEGRAL ACTION • WHERE PROPORTIONAL MODE GOES TO A NEW STEADY-STATE VALUE WITH OFFSET, INTEGRAL DOES NOT HAVE A LIMIT IN TIME, AND PERSISTS AS LONG AS THERE IS A DIFFERENCE. • INTEGRAL WORKS ON THE CONTROLLER GAIN • INTEGRAL SLOWS DOWN THE RESPONSE OF THE CONTROLLER WHEN PRESENT WITH PROPORTIONAL INTEGRAL ACTION • INTEGRAL ADDS AN ORDER TO THE CONTROL FUNCTION FOR A CLOSED LOOP • FOR THE FIRST ORDER PROCESS WITH PI CONTROL, THE TRANSFER FUNCTION IS: Y ( s) 1 Gp ( s) 2 YSP ( s) `p s 2 ` `p s 1 • WHERE `p I p Kc K p AND 1 I `p 2 p Kc K p DERIVATIVE ACTION PROPERTIES • THE DERIVATIVE MODE RESPONDS TO THE SLOPE dy s ( t ) dt • THIS MODE AMPLIFIES SUDDEN CHANGES IN THE CONTROLLER INPUT SIGNAL - INCREASES CONTROLLER SENSITIVITY DERIVATIVE ACTION PROPERTIES • DERIVATIVE MODE CAN COUNTERACT INTEGRAL MODE TO SPEED UP THE RESPONSE OF THE CONTROLLER. • DERIVATIVE DOES NOT REMOVE OFFSET • IMPROPER TUNING CAN RESULT IN HIGH-FREQUENCY VARIATION IN THE MANIPULATED VARIABLE • 7.6 DOES NOT WORK WELL WITH NOISY SYSTEMS DERIVATIVE ACTION PROPERTIES • PROPERTIES OF DERIVATIVE CONTROL: – DOES NOT CHANGE THE ORDER OF THE PROCESS – DOES NOT ELIMINATE OFFSET – REDUCES THE OSCILLATORY NATURE OF THE FEEDBACK RESPONSE • CLOSED LOOP TRANSFER FUNCTION FOR DERIVATIVE-ONLY CONTROL APPLIED TO A SECOND ORDER PROCESS. DERIVATIVE ACTION RESPONSE FOR A PID CONTROLLER DERIVATIVE ACTION • THE PRIMARY BENEFIT OF DERIVATIVE ACTION IS THAT IT REDUCES THE OSCILLATORY NATURE OF THE CLOSED-LOOP RESPONSE.