Proportional/Integral/Derivative
Control
The PID instruction is an output instruction
that controls physical properties such as
temperature, pressure, liquid level, or flow
rate using process loops.
PID Concept
The PID instruction normally controls a
closed loop using inputs from an analog
input module and providing an output to an
analog output module. For temperature
control, you can convert the analog output
to a time proportioning on/off output for
driving a heater or cooling unit.
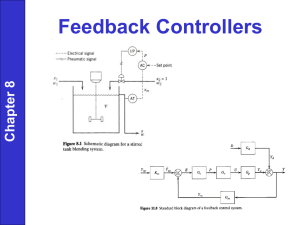
PID Control
The PID equation controls the process by sending
an output signal to the control valve. The greater the
error between the setpoint and process variable
input, the greater the output signal. Alternately, the
smaller the error, the smaller the output signal. An
additional value (feed forward or bias) can be added
to the control output as an offset. The PID result
(control variable) drives the process variable toward
the set point.
PID Equation
PID DIAGRAM
Control system performance is often measured by applying a step function as
the set point command variable, and then measuring the response of the
process variable. Commonly, the response is quantified by measuring defined
waveform characteristics. Rise Time is the amount of time the system takes
to go from 10% to 90% of the steady-state, or final, value. Percent Overshoot
is the amount that the process variable overshoots the final value, expressed
as a percentage of the final value. Settling time is the time required for the
process variable to settle to within a certain percentage (commonly 5%) of the
final value. Steady-State Error is the final difference between the process
variable and set point.
Some systems exhibit an undesirable behavior called Deadtime.
Deadtime is a delay between when a process variable changes, and
when that change can be observed. For instance, if a temperature
sensor is placed far away from a cold water fluid inlet valve, it will not
measure a change in temperature immediately if the valve is opened
or closed. Deadtime can also be caused by a system or output
actuator that is slow to respond to the control command, for instance,
a valve that is slow to open or close. A common source of deadtime
in chemical plants is the delay caused by the flow of fluid through
pipes.
Proportional Response
The proportional component depends only on the
difference between the set point and the process
variable. This difference is referred to as the Error term.
The proportional gain (Kc) determines the ratio of
output response to the error signal. For instance, if the
error term has a magnitude of 10, a proportional gain of
5 would produce a proportional response of 50. In
general, increasing the proportional gain will increase
the speed of the control system response. However, if
the proportional gain is too large, the process variable
will begin to oscillate. If Kc is increased further, the
oscillations will become larger and the system will
become unstable and may even oscillate out of control.
PROPORTIONAL DIAGRAM
Integral Response
The integral component sums the error term over
time. The result is that even a small error term will
cause the integral component to increase slowly.
The integral response will continually increase over
time unless the error is zero, so the effect is to drive
the Steady-State error to zero. Steady-State error is
the final difference between the process variable and
set point. A phenomenon called integral windup
results when integral action saturates a controller
without the controller driving the error signal toward
zero.
INTEGRAL DIAGRAM
Derivative Response
The derivative component causes the output to decrease if the
process variable is increasing rapidly. The derivative response is
proportional to the rate of change of the process variable.
Increasing the derivative time (Td) parameter will cause the
control system to react more strongly to changes in the error
term and will increase the speed of the overall control system
response. Most practical control systems use very small
derivative time (Td), because the Derivative Response is highly
sensitive to noise in the process variable signal. If the sensor
feedback signal is noisy or if the control loop rate is too slow, the
derivative response can make the control system unstable
DERIVATIVE DIAGRAM
PID Concept
The PID instruction can be operated in the timed
mode or the Selectable Time Interrupt (STI mode).
In the timed mode, the instruction updates its output
periodically at a user-selectable rate. In the STI
mode, the instruction should be placed in an STI
interrupt subroutine. It then updates its output every
time the STI subroutine is scanned. The STI time
interval and the PID loop update rate must be the
same in order for the equation to execute properly.
PID Instruction
PID Tuning
PID tuning is a difficult process. However
there are some simple algorithms to follow to
get a system approximately tuned.
Sample PID Application
PID Tuning Tab
PID Configuration Tab
PID Scaling Tab
Sample Values
Sample Values
Sample Values
Sample Values
On-line trial tuning
or
The "by-guess-and-by-golly" method
1. Enter an initial set of tuning constants from
experience. A conservative setting would be a gain of 1
or less and a reset of less than 0.1.
2. Put loop in automatic with process "lined out".
3. Make step changes (about 5%) in setpoint.
4. Compare response with diagrams and adjust.
Ziegler Nichols tuning method:
closed loop
Steps
Place controller into automatic with low gain, no
reset or derivative.
Gradually increase gain, making small changes in
the setpoint, until oscillations start.
Adjust gain to make the oscillations continue with
a constant amplitude.
Note the gain (Ultimate Gain, Gu,) and Period
(Ultimate Period, Pu.)
The Ultimate Gain, Gu, is the gain at which the
oscillations continue with a constant amplitude
The gain, reset, and Derivative are calculated using:
Gain
Reset
Derivative
P
0.5 GU
—
—
PI
0.45 GU
1.2/Pu
—
PID
0.6 GU
2/Pu
Pu/8
Attain these Graphs
Ideal Response
Manipulate Proportional
and
Oscillation
Integral terms
Double Integral
Response
Manipulate
Slow Response
Derivative term
Tuning Tab
Proportional 1 10: to 1 relationship between P:I
Integral
.1
Derivative 0
PV and CV
Must be Real
Data Type for
Version 15
Configuration Tab
100 CV high Limit (PID Max not CV max)
-100 CV Low Limit
0.1 Update time balance with integral(reset)
value
Scaling Tab
Unscaled / Eng Max PV 4000
Unscaled / Eng Min PV -4000
CV Max at 100% - 100
What would 50% be? ____
CV Max at 0% - 100
 0
0