Power Point Slides - Oklahoma State University
advertisement

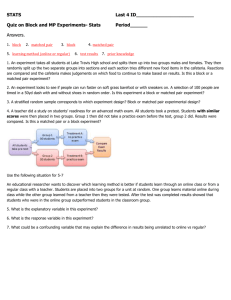
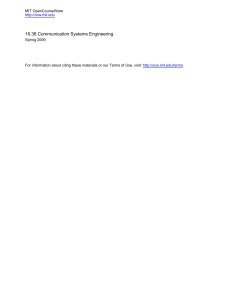
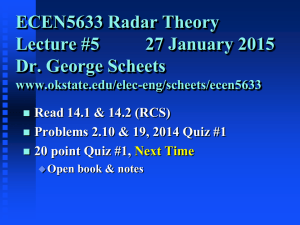
ECEN5633 Radar Theory Lecture #22 2 April 2015 Dr. George Scheets www.okstate.edu/elec-eng/scheets/ecen5633 Read 4.3 Problems 4.10, Web 8 & 9 Design Problem due 7 April (Live), 9 April (DL) Late turn in fee = -1 per working day Reworked exams due 14 April (Live) Quiz #2 Results Hi = 13.6, Low = 6.50, Ave = 11.33, σ =2.71 2015 OSU ECE Spring Banquet Hosted by Student Branch of IEEE Wednesday, 15 April, at Meditations Doors open at 5:30 pm, meal at 6:00 pm Cash Bar Sign up in ES202 to reserve your seat(s) Speakers: Ron Sinnes (Level3, Director IP) & Eric Miller (VYVX, Sports Manager) Dress is Business Casual Many door prizes available! $5 if pay in advance (< 8 April) & resume submitted to ieee@okstate.edu $10 on 9 & 10 April. (A $20 value.) Known best: 8.4" Samsung Galaxy Tab S, two Fluke Multimeters +6 points extra credit All are invited! Sponsored in part by: Coherent Detection RCVR Local Oscillator PLL seeks echo frequency & phase lock tp = 1 μsec, fc = 10 GHz → 10,000 cycles Will take some time Some echo energy is lost Matched Filter fed sinusoid until lock Area around zero Locked → Matched Filter fed baseband pulse Best Potential Performance Non-coherent Detection RCVR Local Oscillator at transmitted fc Stationary target with respect to radar Zero doppler, baseband pulse to Matched Filter Moving target with respect to radar Wide variety of signals fed to Matched Filter May get almost nothing when sampled Quadrature Detection If energy not in I channel, it's in Q channel Ambiguity Function +∞ X(τ,ν) = ∫ g(t)g*(t - τ) ej2πνt dt -∞ X(τ,0) = Autocorrelation of complex envelope g(t) = Matched Filter output envelope at Zero doppler X(0,ν) = F.T. of signal's magnitude (AM) Ambiguity Function +∞ X(τ,ν) = ∫ g(t)g*(t - τ) ej2πνt dt -∞ For most accurate range estimates Want For most accurate radial velocity estimate Want narrow width along τ (time) axis narrow width along ν (frequency) axis Since X(0,0) = 1 & Volume of |X(τ,ν)|2 = 1 (if complex E = 1) May not be able to do both Selected e Integrals Gaussian Pulse Ambiguity Function tp = 1.0 source: west 5633 notes Matched Filter Outputs as fd ↑ fd = 1 fd = 2 fd = 3 fd = 5 Rectangular Pulse Ambiguity Function source: skolnik, Introduction to Radar Systems