Week 7 Power Point Slides
advertisement

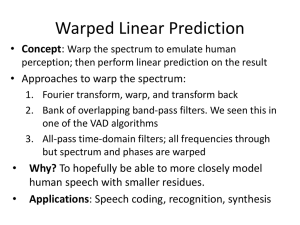
Wide/Narrow Band Spectrograms
• Wide band (left)
– Combines harmonics
– Voiced speech vocal fold
pulses (glottis air puffs)
show as vertical lines
• Narrow band(right)
– Individual harmonics
– Narrow-band displays
formants horizontally
– No vocal pulses shown
Spectrogram for a vowel sound
• Display parameters
– Generally log power
(log(amplitude2)
– Frame shift: 1 ms typical
Spectrograms: vowel with varying pitch
Frame Positioning
• Pitch-synchronous
–
–
–
–
Centered around a pitch period
Varied size frames
Unvoiced sections assume fixed pitch period
Challenge: Determine exact pitch period locations
• Pitch-asynchronous
– Fixed frames and shifts
• typically 25-30 ms frame width with a 10 ms frame shift
• Tradeoffs
– Too large: contains more than one phoneme
– Too small: cannot determine F0 or the harmonics
Source Filter Separation
• Source: F0 correlating to pitch and intonation
• Filter: The spectral envelope
• Three separation approaches: Filter bank, cepstral analysis,
and linear prediction
• Importance: Spectrum and pitch need to be studied separately
Filter Bank
• Time Domain
– Series of linear band pass filters
• Frequency Domain
–
–
–
–
Window a frame (Ex: Hamming)
Perform Fourier Transform
Warp frequencies (Ex: Mel scale)
Compute weighted sum of each bin
• Advantage
– simple and robust for finding spectral envelope
– Okay for ASR (unless language is tonal)
• Disadvantage
– Lose too much detail to find pitch.
– Peaks can fall between harmonics; not good for TTS
The Cepstrum
• Definition: c[n] = F -1{log(|F(x[n]|}
• Note: Sometimes the Cepstrum is taken on the square of the
spectrum rather than on the log of the spectrum
• Treat the spectrum as a wave
– Formant frequency is slow
– Glottal pulses are fast
– Cepstrum separates the two
• Cepstral Terminology
– Cepstrum is Spectrum in reverse
– Quefrency instead of frequency
– Lifter instead of filter
Separating Source from Vocal Filter
• Source
– Excites particular fundamental frequencies
– The glottis source sometimes is noisy
• Filter
– The source is filtered resulting in vocal tract resonances
• Goal: Separate excitation frequencies from the filter
• Process
1.
2.
3.
4.
5.
•
Time domain convolves source with filter (u[n] * v[n])
Convolution multiplies in the frequency domain (UV)
Log converts multiplication to a sum (log(UV) = log(U) + log(V))
The V (filter) varies slowly; the U (excitation) varies quickly.
The inverse operation separates u[n] and v[n] into different
quefrencies
Observations
–
–
There are no pitch excitations in unvoiced speech
Cepstral analysis works well for speech recognition applications
Cepstrum Process Illustration
Time
Speech Signal
Frequency
After FFT
After log(FFT)
Log Frequency
Cepstrums of Excitation
After inverse FFT of log
Time
Spectral envelope on the left, F0 is one of the excitations
Cepstrum Samples
Note: Band passing frequencies below 100 or greater than 900 can help
Cepstral Mean Normalization (CMN)
For Automatic Speech Recognition
• For each window we perform a Cepstral analysis
• Mel scaled Quefrencies summed into 13 to 39 bins
• Each bin represents a Cepstral vector
X = {x0, x1, …, xT-1}
• Compute the mean of each vector coefficient
µk = 1/T ∑t=0,T-1xt where k is a vector coefficient
• Subtract uk from coefficient k of each vector X
Cepstral Evaluation
• The Cepstral process eliminates phase data.
However, human perception largely, but not totally,
ignores phase
• Use the lower quefrencies to study the vocal filter
• Use the peak to study pitch and glottis behavior
• Zeroing the pitch portion of the Cepstrum and
transforming back to the frequency domain is an
approach for speech recognition
• Disadvantage of Cepstrals: They are difficult to
interpret using a visual plot
Time Domain Pitch Detection
• Recall the autocorrelation pitch
detection algorithm
– Correlate a window of speech
with a previous window
– Find the best match
– Problem: too many false peaks
• Peak and center clipping
– Algorithm to reduce false peaks
– clip the top/bottom of a signal
– Center the remainder around 0
• Other alternatives
– Researchers propose many other
pitch detection algorithms
– There are much debate as to
which is the best
Epoch Detection
• Simply determining the pitch is not sufficient for
synthesis
– Unit selection requires accurate anchors to be able to
merge segments of speech
– Otherwise clicks and other artifacts will be heard
• Pitch-marking or epoch-detection attempt to
accurately mark pitch points
– Mark peaks or troughs
– Mark Instant of glottal closure (large negative pulse)
• There are many algorithms proposed, but this
remains an open research area
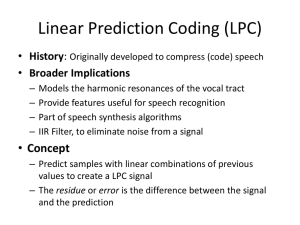
Linear Prediction Coding (LPC)
• Originally developed to compress (code) speech
• Although coding pertains to compression, the term
LPC has much broader implications in NLP
– LPC is equivalent to the vocal tract model (Week 6)
– LPC is another computational method to
• Compute vocal tract reflection coefficients
• Compute vocal tract filter coefficients
– LPC is useful to separating source (glottis) from filter
(vocal tract)
Linear Predictive Encoding (LPC)
One approach: There are many others with better compression
Concept
• Guess at the next value
using a set of previous
values
• Instead of outputting the
actual data, output the
error from the guess
• Less bits should be
needed if the guess is
good
Pseudo Code
WHILE not EOF
READ sample n (s[n])
x = prediction()
error = x – s[n]
IF error too large to
fit in compressed size
WRITE special code
WRITE s[n]
ELSE
WRITE error
Linear Algebra Background
• N equations and P unknowns
• If N<P, ∞ number of potential solutions
–x+y=5
– Solutions are along the line y = 5-x
• If N=P, there is at most one unique solution
– Solution: x + y = 5 and x – y = 3, solution x=4, y=1
• If N>P, there cannot even be one solution
– No solutions for: x+y = 4, x – y = 3, 2x + 7 = 7
– The best we can do is find the closes fit
Least Squares: minimize error
• First Approach: Linear algebra – find orthogonal
projections of vectors onto the best fit
• Second Approach: Calculus – Use derivative with
zero slope to find best fit
Solving n equations and n unknowns
• Gaussian Elimination
– Complexity: O(n3)
• Successive Iteration
– Complexity varies
• Cholskey Decomposition
– More efficient, still O(n3)
• Levenson-Durbin
– Complexity: O(n2)
Definitions for any matrix, A
Transpose (AT): Replace aij by aji for all i and j – Works for symmetric
Symmetric: AT = A
Toplitz matrices
Positive Definite: No complex solutions
Toplitz: Diagonals to the right all have equal values
Lower/Upper triangular: No non zero values above/below diagonal
Symmetric Toeplitz Matrices
Example
• Flipping rows and columns produces the same matrix
• Every diagonal to the right contains the same value
Levinson Durbin
Algorithm
or
Step 0
E0 = 1 [r0 Initial Value]
Step 1
E1 = -3 [ (1-k12)E0]
k1 = 2 [r1/E0]
Step 2
E2 = -8/3 [ (1-k22)E1]
k2 = 1/3 [(r2 – a11r1)/E1]
Step 3
E3 = -5/2 [(1-k32)E2
k3 = 1/4 [(r3 – a21r2 – a22r1)/E2]
Step 4
E4 = -12/5 [(1-k42) E3]
k4 = 1/5 [r4 – a31r3 – a32r2 – a33r1)/E3]
a11=2 [k1]
a21=4/3 [a11-k2a11]
a22=1/3[k2]
a31=5/4 [a21-k3a22]
a32=0 [a22-k3a21]
a33=1/4 [k3]
a41=6/5 [a31-k4a33]
a42=0 [a32-k4a32]
a43=0[a33-k4a31]
a44=1/5[k4]
Verify results by plugging a41, a42, a43, a44 back into the equations
6/5(1) + 0(2) + (0)3 + 1/5(4) = 2, 6/5(2) + 0(1) + 0(2) + 1/5(3) = 3
6/5(3) + 0(2) + 0(1) + 1/5(2) = 4, 6/5(4) + 0(3) + 0(2) + 1/5(1) = 5
Levinson-Durbin Pseudo Code
E0 = r 0
FOR step = 1 TO P
kstep = ri
FOR i = 1 TO step-1 THEN kstep -= ai-1,i * rstep-i
kstep /= Estep-1
Estep = (1 – k2step)Estep-1
astep,step = kstep-1
For i = 1 TO step-1 THEN astep,i = astep-1,I – kstep*astep-1, step-i
Note: ri are the row 1 matrix coefficients
Cholesky Decomposition
• Requirements:
– Symmetric (same matrix if flip rows and columns)
– Positive definite matrix (no complex solutions)
• Solution
– Factor matrix A into: A = LLT where L is lower triangular
– Perform forward substitution to solve: L(LT[ak]) = [bk]
– Use the resulting vector, [xi], in the above step to perform a
backward substitution to solve for LT[ak] = [xi]
• Complexity
– Factoring step O(n3/3)
– Forward substitution: n2
– Backward substitution: n2
Cholesky Factorization
Result:
Cholesky Factorization Pseudo Code
FOR k=1 TO n-1
lkk = a½kk
FOR j = k+1 TO n
ljk = ajk/ lkk
FOR j = k+1 TO n
FOR i = j TO n
aij = aij – lik ljk
lnn = ann
•
•
•
•
Column index: k
Row index: j
Elements of matrix A: aij
Elements of matrix L: l
Illustration: Linear Prediction
{1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16}
Goal: Estimate yn using the three previous values
yn ≈ a1 yn-1 + a2 yn-2 + a3 yn-3
Three ak coefficients, Frame size of 16
Thirteen equations and three unknowns
Note: The equation is an IIR filter
LPC Basics
• Predict x[n] from x[n-1], … , x[n-P]
– en = yn - ∑k=1,P ak yn-k
– en is the error between the projection and the actual value
– The goal is to find the coefficients that produce the
smallest en value
• Concept
– Square the error
– take the partial derivative with respect to each ak
– Find the solution with zero derivative (the minimum).
• Result : P equations with P unknowns
Finding the Best LPC Estimate
• One linear prediction equation: en = yn - ∑k=1,P ak yn-k
– Over a whole frame we have n equations and k unknowns
• Sum en over the entire frame: E = ∑n=0,N-1(yn - ∑k=1,P ak yn-k)
• Square the total error: E2 = ∑n=0,N-1 (yn - ∑k=1,P ak yn-k)2
• Take partial derivative with respect to each aj; generates P equations (Ej)
– Like a regular derivative treating only aj as a variable
2Ej = 2(∑n=0,N-1 (yn - ∑k=1,P akyn-k)yn-j)
– Calculus Chain Rule: if y = y(u(x)) then dy/dx = dy/du * du/dx
• Set each Ej to zero (zero derivative) to find the minimum P errors
for j = 1 to P then 0 = ∑n=0,N-1 (yn - ∑k=1,P akyn-k)yn-j (j indicates the equation)
• Rearrange terms: for each j of the P equations,
∑n=0,N-1 ynyn-j=∑n=0,N-1∑k=1,Pakyn-kyn-j=∑k=1,P∑n=1,Nakyn-kyn-j =∑k=1,Pakφ(j,k)=φ(j,0)
• Result: P equations and P unknowns where φ(j,k) = ∑n=0,N-1 yn-kyn-j
Covariance Method
• Result from previous slide (equation j): ∑n=0,N-1ynyn-j = ∑k=1,P∑n=0,N-1akyn-kyn-j
• A more concise notation when φ(j,k) = ∑n=0,N-1 yn-kyn-j is φ(j,0)=∑k=1,Pakφ(j,k)
•
•
•
•
Now we have P equations and P unknowns
Because φ(j,k) = φ(k,j), the matrix is symmetric
Solution requires O(n3) iterations (ex: Cholskey’s decomposition)
Why covariance? It’s not probabilistic, but the matrix looks similar
Covariance Example
Recall: φ(j,k) = ∑n=start,start+N-1 yn-kyn-j
Where equation j is: φ(j,0) = ∑k=1,Pakφ(j,k)
•
•
•
•
•
•
•
•
•
•
•
•
•
•
Signal: {…, 3, 2, -1, -3, -5, -2, 0, 1, 2, 4, 3, 1, 0, -1, -2, -4, -1, 0, 3, 1, 0, …}
Frame: {-5, -2, 0, 1, 2, 4, 3, 1}, Number of coefficients: 3
φ(1,1) = -3*-3 +-5*-5 + -2*-2 + 0*0 + 1*1 + 2*2 + 4*4 + 3*3 = 68
φ(2,1) = -1*-3 +-3*-5 + -5*-2 + -2*0 + 0*1 + 1*2 + 2*4 + 4*3 = 50
φ(3,1) = 2*-3 +-1*-5 + -3*-2 + -5*0 + -2*1 + 0*2 + 1*4 + 2*3 = 13
φ(1,2) = -3*-1 +-5*-3 + -2*-5 + 0*-2 + 1*0 + 2*1 + 4*2 + 3*4 = 50
φ(2,2) = -1*-1 +-3*-3 + -5*-5 + -2*-2 + 0*0 + 1*1 + 2*2 + 4*4 = 60
φ(3,2) = 2*-1 +-1*-3 + -3*-5 + -5*-2 + -2*0 + 0*1 + 1*2 + 2*4 = 36
φ(1,3) = -3*2 +-5*-1 + -2*-3 + 0*-5 + 1*-2 + 2*0 + 4*1 + 3*2 = 13
φ(2,3) = -1*2 +-3*-1 + -5*-3 + -2*-5 + 0*-2 + 1*0 + 2*1 + 4*2 = 36
φ(3,3) = 2*2 +-1*-1 + -3*-3 + -5*-5 + -2*-2 + 0*0 + 1*1 + 2*2 = 48
φ(1,0) = -3*-5 +-5*-2 + -2*0 + 0*1 + 1*2 + 2*4 + 4*3 + 3*1 = 50
φ(2,0) = -1*-5 +-3*-2 + -5*0 + -2*1 + 0*2 + 1*4 + 2*3 + 4*1 = 23
φ(3,0) = 2*-5 +-1*-2 + -3*0 + -5*1 + -2*2 + 0*4 + 1*3 + 2*1 = -12
Auto-Correlation Method
•
•
•
•
Assume: all values of the signal outside of 0<j<N-1 is zero
Correlate from -∞ to ∞ (most values are 0)
The LPC formula for φ becomes: φ(j,k)=∑n=0,N-1-(j-k) ynyn+(j-k)=R(j-k)
The Matrix is now in the Toplitz format
– The Levinson Durbin algorithm applies
– Implementation complexity: O(n2)
Auto Correlation
Example
Recall: φ(j,k)=∑n=0,N-1-(j-k) ynyn+(j-k)=R(j-k)
Where equation j is: R(j) = ∑k=1,P R(j-k)ak
Notation: j is the row, k is the column
• Signal: {…, 3, 2, -1, -3, -5, -2, 0, 1, 2, 4, 3, 1, 0, -1, -2, -4, -1, 0, 3, 1, 0, …}
• Frame: {-5, -2, 0, 1, 2, 4, 3, 1}, Number of coefficients: 3
•
•
•
•
R(0) = -5*-5 + -2*-2 + 0*0 + 1*1 + 2*2 + 4*4 + 3*3 + 1*1 = 60
R(1) = -5*-2 + -2*0 + 0*1 + 1*2 + 2*4 + 4*3 + 3*1 = 35
R(2) = -5*0 + -2*1 + 0*2 + 1*4 + 2*3 + 4*1 = 12
R(3) = -5*1 + -2*2 + 0*4 + 1*3 + 2*1 = -4
LPC Transfer Function
• Predict the values of the next sample
Ŝ[n] = ∑ k=1,p ak s[n−k]
• The error signal (e[n]), is the LPC residual
e[n]=s[n]− ŝ[n] = s[n]− ∑ k=1,p ak s[n−k]
• Perform a Z-transform of both sides
E(z)=S(z)− ∑k=1,pak S(z)z−k
• Factor S(z)
E(z) = S(z)[ 1−∑k=1,p ak z−k ]=S(z)A(z)
• Compute the transfer function: S(z) = E(z)/A(z)
• Conclusion: LPC provides us with an all pole filter
LPC Coding and Synthesis Models
Coding Model
Synthesis Model
Conclusion
The LPC all-pole model can code and synthesizes speech
The LPC Model
• The LPC estimate
– An all-pole IR filter: yn = Gxn - ∑k=1,N ak yn
– The Gxn residual attempts to model the glottal source
– LPC estimates the separation of source from filter
• Challenges (Problems in synthesis)
– The residual does not accurately model the source (glottis)
– The filter does not model radiation from the lips
– The model does not account for nasal resonances
• Possible solutions
– Additional poles can increase the accuracy to a point
• 1 pole pair for each 1k of sampling rate
• 2 more pairs can better estimate the source and lips
– Introduce zeroes into the model
– More robust analysis of the glottal source and lip radiation
The LPC Spectrum
1. Perform a LPC analysis
2. Find the poles
3. Plot the spectrum around
the z-Plane unit circle
What do we find concerning the LPC spectrum?
1. Adding poles better matches speech up to about 22 for a 16k sampling rate
2. The peaks tend to be overly sharp (“spiky”) because small radius changes
greatly alters pole skirt widths
PARCOR
• Definition: [PAR]tial auto [COR]relation coefficients
– LPC coefficients are: a1, a2, … aP
– PARCOR coefficients are: k1, k2, … kP
– It is easy to compute PARCOR from LPC and visa versa
• Review
– Rectangular tubes have reflection coefficients
rk = (Ak+1 – Ak)/(Ak+1 + Ak)
– With algebra the ratio of areas between tubes are:
Ak/Ak+1 = (1-rk)/(1+rk)
• Importance
– LPC is equivalent to the tube model of the vocal tract
– Log[Ak+1/Ak] = log[(1-ki)/(1+ki)]
– We can adjust the LPC parameters based on PARCOR
Relationship to Tube Model
Given PARCOR, compute LPC
FOR i = 1 TO P
xi,i = ki
if (i>1) then FOR j = 1 TO i-1
xi,j = xi-1,j – kixi-1,i-j
FOR j=1 TO P THEN aj = xP,j
Given LPC, compute PARCOR
FOR j = 1 TO P THEN xP,j = aj
kp = xP,P
FOR i = P TO 2 STEP -1
FOR j = 1 TO i-1
xi-1,j = (xi,j + kixi,i-j)/(1-ki2)
ki-1 = xi-1,i-1
Notes:
ki are PARCOR coefficients
ai are LPC coefficients
xi,j is a temporary work array
Line Spectrum Pairs
• Overview
– Filter with an additional coefficient
– Uses the equations on the right
– The New filter models:
• A completely closed glottis
• Completely open lips
• Characteristics
– Spectrum shown as lines because of infinite amplitudes of formants
– Forces zeros and poles to be interspersed on the unit circle
• Advantages
– Easier to estimate formants
– Less sensitive to quantization errors
LPC and the Source Signal
• Experiments show
– Glottis requires both zeros and poles
– It requires less poles than the vocal function
– LPC combines the glottal and vocal tract poles
• If U(z) = I(z)G(z)
– U(z) = source function
– I(z) = Impulse sequence
– G(z) Glottal filter
• Transfer function U(Z) = I (z)
∏k=0,Mbkz-k
1 - ∏j=0,Lajz-j
• Goal: separate glottal poles from the LPC predictor
Closed Phase Analysis
• Find Instant of glottal closure
– Epoch detection algorithm
• Divide signal
– closed phase (glottis does not affect LPC predictors)
– open phases (glottis has significant impact)
• Strategy
– Compute the G filter over a number of pitch periods
– Perform an inverse filter to obtain the glottal signal
Open Phase Analysis
• Problem: It is not easy to find the instance of glottal closure
• Goal: add extra poles to the model
• Advantages
– Human hearing is more sensitive to peaks than to valleys
– The tube model and LPC are all-pole systems
• Disadvantages:
– Relationships between the poles and the formants becomes obscure
– Extra poles can approximate a zero, but not perfectly
• How can extra poles approximate zeros
– For example if x,y ≠ -1, then consider the following derivation
1-x = 1/(1+y)
1 = (1-x)(1+y) = 1 +y –x –xy = 1 + y(1-x) – x
Therefore: y = x/(1-x)