Negotiation
advertisement

Negotiation
A Lesson in Multiagent System
Based on Jose Vidal’s book
Fundamentals of Multiagent Systems
Henry Hexmoor
SIUC
Negotiation: The Bargaining Problem
• Interaction in order to agree on a deal
• Approach is to exchange messages among agents
– Objective is to reach a deal, that:
1. maximizes utilities,
2. avoids expiration,
3. avoids risk of conflict, and
4. avoid failure on deal
Automated Negotiation
• Knowledge and Decision making is distributed to local sites
• Utilities are optimized without:
1. central aggregation, or
2. central reasoning
Examples:
• Large organizations, governments, societies
Bargaining problem(Nash 1950)
ui : R
Where
represents set of deals
R represents real number of states
• : the no deal deal
u
(
) i.e., agent prefers no deal to
•
negative utility
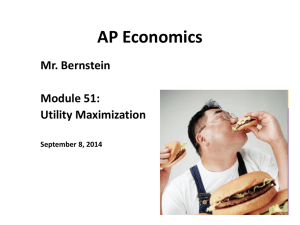
Pareto Optimal
• A deal is Pareto Optimal if there is no
other deal such that no one prefers it over
• For two agents i and j
Pareto Frontier
j
Space of possible deals
A deal
i
Independence of Utility units Property
• A Negotiation is independent of utility units if
when U chooses and when given
U ' 1u1 , 2u2 ,..., I uI : u U
chooses
i ui ( ' ) i ui ( )
Where
e.g., money in different countries
'
Symmetry Property
• A negotiation protocol is symmetric if the
solution remains the same as long as the set of
utility function U is the same, regardless of
which agent has which the utility.
Rationality
• A deal is individually rational iff
i
ui ( ) ui ( )
Irrelevant Alternatives Property
• A negotiation to protocol is independent of
irrelevant alternatives if it is true that when
given the set of possible deals it chooses
and when ' where ' it again
chooses , assuming U stays constant
Egalitarian Solution
• Gains are equally shared and
arg max ui ( ' )
'E
i
Where E represents set of deals which equal
payoff
E
ui ( ) u j ( )
ij
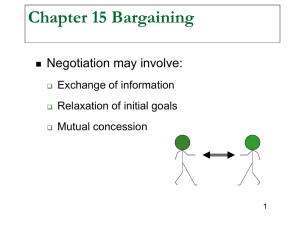
Egalitarian solution for two…
Egalitarian deal may
not be Pareto Optimal
uj
ui
Egalitarian Social Welfare solution
• A deal that maximizes the utility received by
the agent with the smallest utility
Example: Helping the poor!
arg max min ui ( )
i
Every problem is guaranteed to have an egalitarian social welfare solution
Utilitarian solution
• A deal that the deal that maximizes the sum of
all utilities
arg max ui ( )
i
• The utilitarian deal is a Pareto optimal deal.
• There might be more than one utilitarian deals in the case of a tie.
• The utilitarian deal violates the independence of utility units assumption.
Nash Bargaining solution
• A deal that maximizes the product of the utilities :
• The Nash solution is
1.
2.
3.
Pareto efficient,
independent of utility units,
symmetric, and
4.
independent of irrelevant alternatives
arg max ui ( ' )
'
.
Kalai-smorodinsky
• A deal that distributes utilities in proportion to
the maximum that the agent can get.
Human preferences for deals is complex!
The Rubinstein Bargaining Process
• Agents act only at discrete time steps.
• In each time step, one of the agents proposes a deal to the other
who either accepts it or rejects it.
• If the offer is rejected then we move to the next time step where
the other agent gets to propose a deal.
• Once a deal has been rejected it is considered void and cannot
be accepted at a later time.
• The alternating offers models does not have a dominant
strategy.
• We assume that time is valuable. The agents’ utility for all
possible deals is reduced as time passes. E.g., haggling over
how to split an ice cream sundae which is slowly melting.
Time matters
• Introducing a discount factor
ti
= i’s discount coefficient at time t
= 0 do it now or lose
= 1 do it whenever . . .
•
The agents’ utility for every possible deal decreases
monotonically as a function of time with a discount factor.
Theorem
• The Rubinstein alternating offers game where
the agents have complementary linear utilities
has a unique subgame perfect equilibrium
strategy where
1 j
– Agent i proposes a deal 1
i j
and accept the offer j from j only if
1
– Agent j proposes a deal
1
and accept the offer i from i only if
*
i
*
j
ui ( j ) ui ( *j ),
i
i
j
u j ( i ) u j ( i* )
Corollaries
1 j (1 )
*
i
*
j
*
j
*
i i
Monotonic Concession Protocol
1. i arg max ui ( )
2. propose i
3. receive j proposal
4. if ui ( j ) ui ( i )
5. then accept j
6. else j 'i such that uj ( 'i ) u j ( i ) and ui ( 'i ) ui ( )
7. goto 2
Zeuthern strategy
• Willingness to risk deal break down, riski
ui ( i ) ui ( j )
ui ( i )
• Agent calculates the risks for both agents.
• The agent with the smallest risk should concede just enough to get
the deal agreed in one step.
• Zeuthern strategy converges to Nash solution.
One step negotiation (Rosenschein
and Zlotkin, 1994)
• Each agent then has two proposals: the one it makes and the one it receives.
• The agents must accept the proposal that maximizes the product of the agents’ utilities.
• If there is a tie then they coordinate and choose one of them at random.
1. E { | ' ui ( )u j ( ) ui ( ' )u j ( ' )}
2. i arg max ui ( )
E
3. propose i
4. receive j
5. if
6.
ui ( j )u j ( j ) ui ( i )u j ( i )
then report error , j is not
7. else, coordinate with
following strategy
j to choose randomly between i and j
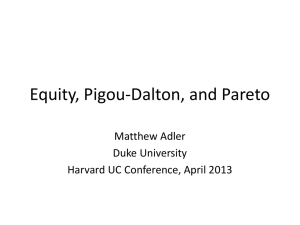
Distributed Search
0
Deals that dominate
Search through dominant deals as in a hill
climbing strategy problems my exist
Ad-hoc Negotiation Strategies
• Faratin(Jenning’s student) deployed
Multiagent Negotiation systems, such as
ADEPT
Task allocation problem
T A mapping
• Ci : S R agent i incurs a cost for performing
task S
Example:
Postman problem: Trading letters to lower
their costs
Problems with lies . . .