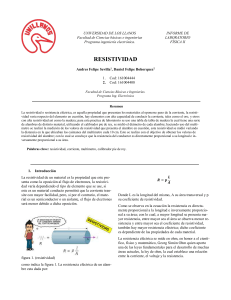
Introducción En 1856, Lord Kelvin descubrió que al aplicar una fuerza sobre un hilo conductor o semiconductor, se presenta una variación en su resistencia eléctrica, éste principio permite medir fuerzas que provoquen deformaciones en el conductor. La utilidad de éste principio ésta en la construcción de galgas extensiométricas. Galgas Extensiométricas Las galgas Extensiométricas son transductores, que aplicados sobre un espécimen, permiten medir la fuerza ejercida sobre el a partir de la deformación resultante, así, cuando se aplica una fuerza de compresión, tensión o torsión, genera deformación, que es transmitida a la galga, produciendo una variación en su resistencia eléctrica. Las mediciones realizadas en estos equipos pueden ser de 3 tipos: Estáticas: Realizadas a estructuras sometidas a cargas fijas. Mixtas: Si se trata de estructuras sometidas a cargas de variación rápida. Dinámicas: Para medir acciones de variación rápida, fenómenos de vibración, impacto, etc. 1 Principio De Funcionamiento Su funcionamiento está basado en el efecto piezoeléctrico, de metales y semiconductores, según el cual, su resistividad eléctrica es dependiente de la deformación a la cuál son sometidos, el material del que está hecho, y el diseño aplicado. La resistencia eléctrica de un conductor o semiconductor está dada por: 𝑅= 𝑙 𝐴 Donde: R = Resistencia eléctrica = resistividad l = longitud A = Sección transversal Si el material es sometido a un esfuerzo en dirección longitudinal, los valores que intervienen en R cambian: , Y por tanto dR puede expresarse como: 𝑑𝑅 = 𝐴(𝑑𝑙 + 𝑙𝑑) − 𝑙𝑑𝐴 𝐴2 El cambio de longitud que resulta de aplicar una fuerza F a una pieza tridimensional (mientras no se supere su límite elástico), está dado por la ley de Hooke: = 𝐹 𝑑𝑙 = 𝐸𝑒 = 𝐸 𝐴 𝑙 Donde E es el módulo de elasticidad, e es la deformación unitaria y es el esfuerzo uniaxial. 2 Como el hilo se estira en la dirección axial, el área de la sección transversal disminuye, la razón de la deformación lateral a la deformación axial también es una propiedad del material, llamada relación de Poisson: µ=− 𝑑𝐷/𝐷 𝑑𝑙/𝑙 Donde D es el diámetro del hilo. La relación de la relación de Poisson está entre 0 y 0.5, en términos de ésta tendremos lo siguiente: 𝑑𝑅 𝑑𝑙 𝑑 = [1 + 2µ] + 𝑅 𝑙 Los cambios en la resistencia se originan por la modificación de la geometría en la longitud o el área y el cambio en la resistividad. La dependencia de la resistividad en deformación mecánica se expresa en términos del coeficiente de piezoresistencia (1), definido por la siguiente expresión 1 𝑑/ 𝐸 𝑑𝑙/𝑙 Por lo tanto el cambio en la resistencia es: 1 = 𝑑𝑅/𝑅 = 1 + 2µ + 1 𝐸 𝑑𝑙/𝑙 El cambio en resistencia de un medidor de deformación por lo general se expresa en términos de un parámetro determinado por el fabricante empíricamente llamado factor de galga, GF expresado como: 𝐺𝐹 𝛿𝑅/𝑅 𝑒 Fuente: Alzate Rdz, E., Montes Ocampo, J. y Silva Ortega, C. (2007), Medidores De Deformación Por Resistencia: Galgas Extensiométricas., en: Scientia et Technica, año XII No. 44, pp 7-12 3