2020")
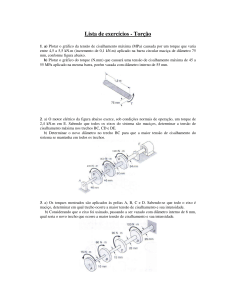
MECÂNICA DOS SÓLIDOS TORÇÃO Por Santiago Maya Johnson Semestre 01-2020 Universidade Federal de São Carlos SP - Brasil 1 “Nothing in life is to be feared, it is only to be understood. Now is the time to understand more, so that we may fear less.” “Nada na vida deve ser temido, somente compreendido. Agora é hora de compreender mais para temer menos.” Marie Skłodowska Curie 2 Torção A Figura mostra um exemplo comum de carga de torção e indica as tensões de cisalhamento e o estresse resultante da torção. Um torque (par) de magnitude 2P*b é aplicado ao eixo AB da alavanca pela aplicação de forças iguais e opostas de magnitude P nas extremidades do braço CD (Fig. a, b). Dizemos que o eixo AB é um membro de torção. Como indicado na Fig. c, o eixo AB é submetido a torques iguais e opostos de magnitude T que torcem uma extremidade em relação à outra e, como mostrado na Fig. d, o torque T atuando em uma seção transversal entre A e B é o resultante de tensões de cisalhamento distribuídas. 3 Roy R. Craig - Mechanics of Materials 3rd Ed Torção O torque é um momento que tende a torcer um membro em torno de seu eixo longitudinal. Hibbeler - Mechanics of Materials - 8th Ed Quando o torque é aplicado, os círculos e as linhas de grade longitudinais originalmente marcadas no eixo tendem a se distorcer dentro do padrão mostrado na Fig. b. Observe que a torção faz com que os círculos permaneçam em círculos, e cada linha de grade longitudinal se deforma em uma hélice que cruza os círculos em ângulos iguais. 4 Torção O momento de um par pode ser representado por um vetor na forma de uma seta de duas pontas (Fig. b). A seta é perpendicular ao plano que contém o par e, portanto, neste caso, ambas as setas são paralelas ao eixo da barra. A direção (ou sentido) do momento é indicada pela regra da mão direita. James M Gere - Mechanics of Materials 6th Ed 5 Torção Quando um eixo circular, seja ele sólido ou tubular, é submetido à torção, cada seção transversal permanece plana e simplesmente gira em torno do eixo do membro. Por outro lado, como pode ser visto na Fig. b, seções transversais da barra quadrada tornam-se deformadas quando a barra é torcida em torno de seu eixo. Beer & Johnston - Mechanics of Materials 7th Ed Por causa da simplicidade matemática da teoria de torção de membros com seção transversal circular, e por causa da aplicação generalizada de tais membros, nós desenvolveremos a teoria de torção para membros circulares. 6 Torção Observe que as linhas circunferenciais, que representam as seções transversais planas antes da deformação, permanecem em um plano após a deformação, mas que as linhas longitudinais, que são paralelas ao eixo do membro antes da deformação, tornam-se helicoidais como resultado de deformação torcional. 7 Roy R. Craig - Mechanics of Materials 3rd Ed Deformação Torcional de um Eixo Circular Se o eixo estiver fixado em uma extremidade (engastado) e um torque for aplicado à outra extremidade, o plano sombreado verde escuro na Fig. se distorcerá em uma forma inclinada, como mostrado. Aqui, uma linha radial localizada na seção transversal a uma distância x da extremidade fixa do eixo irá girar através de um ângulo φ(x). O ângulo φ(x) é chamado de ângulo de torção. Depende da posição x e irá variar ao longo do eixo como mostrado. Hibbeler - Mechanics of Materials - 8th Ed 8 Deformação Torcional de um Eixo Circular Para entender como essa distorção deforma o material, vamos agora isolar um pequeno elemento localizado a uma distância radial ρ(rho) do eixo da barra. 9 Deformação Torcional de um Eixo Circular Devido à deformação, as faces frontal e traseira do elemento sofrerão uma rotação; a face traseira φ(x) e a face frontal φ(x) + Δφ. Como resultado, a diferença nessas rotações, Δφ, faz com que o elemento seja submetido a uma deformação de cisalhamento. A D γ B Δx ρ γ Δφ ângulos em radianos!!! 10 Deformação Torcional de um Eixo Circular A D γ B γ Δx Δφ Δφ ρ Δx ρ ângulos em radianos!!! ângulos em radianos!!! 11 Deformação Torcional de um Eixo Circular O comprimento do arco BD é: BD = ρ ⋅ ∆φ raio Para ângulos pequenos: BD tan(γ ) ≅ γ = ∆x ângulo central Portanto, se deixarmos Δx -> dx e Δφ -> dφ; dφ γ =ρ dx Aqui γ é a deformação de cisalhamento na seção transversal x, a uma distância ρ do eixo. A derivada dφ / dx é chamada de taxa de torção. 12 Deformação Torcional de um Eixo Circular Como dx e dφ são os mesmos para todos os elementos localizados em pontos na seção transversal em x, então (dφ / dx) é constante sobre a seção transversal, e equação anterior afirma que a magnitude da deformação de cisalhamento para qualquer um desses elementos varia apenas com sua distância radial ρ do eixo da barra circular. Em outras palavras, a deformação de cisalhamento dentro do eixo varia linearmente ao longo de qualquer linha radial, de zero no eixo da barra até um máximo γmax em seu limite externo. dφ γ γ max = = dx ρ c ρ γ = ⋅ γ max c Onde: γ = deformação de cisalhamento na seção transversal x, a uma distância ρ do eixo. ρ = distância desde o centro da barra. c = raio da barra. γmax = deformação de cisalhamento máxima. 13 Deformação Torcional de um Eixo Circular A deformação de cisalhamento, γ, varia linearmente com ρ, a distância do eixo. Mesmo se um membro de torção circular fosse solido, tubular, ou feito de um núcleo central de um material ligado a uma manga tubular externa de outro material. Roy R. Craig - Mechanics of Materials 3rd Ed 14 A Fórmula de Torção Quando um torque externo é aplicado a um eixo, ele cria um torque interno correspondente dentro do eixo. τ = G ⋅γ Se o material for elástico linear, então aplica-se a lei de Hooke, τ = G γ, conseqüentemente, uma variação linear na deformação de cisalhamento, como observado na seção anterior, leva a uma variação linear correspondente na tensão de cisalhamento ao longo de qualquer linha radial na seção transversal. 15 A Fórmula de Torção τ = G ⋅γ ρ ; γ = ⋅ γ max c Quando, τ é máximo então γ também é máximo. τ max = G ⋅ γ max → τ max G = γ max Deixando a deformação de cisalhamento em função da tensão cortante máxima : ρ τ γ = ⋅ max c G 16 A Fórmula de Torção τ = G ⋅γ ρ τ ; γ = ⋅ max c G ρ τ max τ = G ⋅ ⋅ c G 0 c c ρ = c τ = ⋅τ max = τ max c ρ = 0 τ = ⋅τ max = 0 ρ τ = ⋅τ max c Assim, τ variará de zero no eixo longitudinal da barra até um valor máximo, τmax , na sua superfície externa. Essa equação expressa a distribuição das tensões de cisalhamento na seção transversal em termos da posição radial do elemento. 17 A Fórmula de Torção Agora podemos aplicar a condição que requer que o torque produzido pela distribuição de tensão sobre toda a seção transversal seja equivalente ao torque interno resultante T na seção, que mantém o eixo em equilíbrio. τ ΔA C ρ 18 A Fórmula de Torção Especificamente, cada elemento da área dA, localizado em ρ é submetido a uma força de dF = τ dA. O torque produzido por esta força é : dT = ρ (τ ⋅ dA) tensão área braço Lembrando que: força ρ τ = ⋅τ max momento c Temos, portanto, para toda a seção transversal: dT = ρ (τ ⋅ dA) = ρ A A ( )τ ρ c max ⋅ dA 19 A Fórmula de Torção Como τmax , c ; são constantes: T= τ max c A ρ 2 ⋅ dA A integral depende apenas da geometria do eixo. Representa o momento polar de inércia da área da seção transversal da barra em torno do eixo longitudinal da barra. J = I P = ρ 2 ⋅ dA A 20 Momento Polar de Inércia dA r ρ dθ I P = ρ 2 ⋅ dA A = r 2π 0 0 ρ 2 ⋅ ρ dθ dρ 21 Momento Polar de Inércia IP = r 2π 0 0 = r 2π 0 0 r ρ 2 ⋅ ρ dθ dρ 2π r ρ dθ dρ = ρ 3 ⋅ θ 0 dρ 3 0 r = ρ ⋅ (2π − 0)dρ = 2π ρ 3dρ 3 0 0 1 4 r 2π 4 = 2π ⋅ ρ = r −0 0 4 4 4 π ⋅r4 π ⋅ ( D / 2) 4 π ⋅ D16 π ⋅ D 4 IP = = = = 2 2 2 32 ( ) 22 Momento Polar de Inércia Note que J, IP , é uma propriedade geométrica da área circular e é sempre positiva. De maneira análoga, para barra tubular de raio interior ri , e raio exterior re : IP = re ri 2π 0 ρ 2 ⋅ ρ dθ dρ re 1 = 2π ⋅ ρ 4 4 ri = ( r 2 π e 4 − ri 4 ) 23 A Fórmula de Torção Voltando a nossa fórmula de torção: T= τ max c IP Para uma barra sólida (de raio exterior, c = r ) : τ max = T ⋅r T ⋅r = IP (π / 2)r 4 τ max = 2T π ⋅ r3 Para uma distância ρ desde o centro da barra: T ⋅ρ τ= IP 2T τ= π ⋅ ρ3 24 Exemplo 1 – Torção O tubo de raio interno c/2, e raio externo c, é submetido a um torque de T. Determinar a quantidade deste torque que é resistido pelo tubo em comparação com uma barra sólida. Solução: τ max τ max π 4 c )4 ) c ( − ( 2 c c 2 τ max π 4 c 4 τ max π 16c 4 − c 4 = c − = c 2 c 2 16 16 T= IP = 25 Exemplo 1 – Torção T= τ max π 15c 4 15 π 3 = τ ⋅ c max c 2 16 16 2 Vamos calcular como seria o Torque T’ para uma barra sólida de raio c: T′ = τ max c IP = τ max π ⋅ c 4 π = τ max ⋅ c c 2 2 3 Sabemos que o τmax é igual porque é o mesmo material, e o raio exterior “c” é igual também, substituindo: T= 15 T ′ = 0.9375 ⋅ T ′ 16 Então, aproximadamente 94% do torque é resistido por um tubo de raio interior c/2. O que justifica o uso de eixos tubulares como um meio eficiente de transmitir torque e, assim, economizar material. 26 Ângulo de torção Usando a mesma análise da seção anterior: dφ γ = dx ρ dφ = γ dx ρ 27 Ângulo de torção Usando a lei de Hooke, e a formula de torção: τ = G ⋅γ ; τ= T ( x) ⋅ ρ I P ( x) dφ = φ= τ G = T ( x) ⋅ ρ I P ( x) ⋅ G T ( x) 1 T ( x) ⋅ ρ dx = dx ρ I P ( x) ⋅ G I P ( x) ⋅ G Substituindo: γ dφ = dx ρ γ= L 0 T ( x) dx I P ( x) ⋅ G Onde: φ = o ângulo de torção de uma extremidade da barra em relação à outra extremidade, medida em radianos. T(x) = o torque interno na posição arbitrária x, encontrado a partir do método de seções e a equação de equilíbrio de momento aplicada sobre o eixo da barra. Ip(x) = o momento polar de inércia da barra expresso em função da posição x. G = o módulo de elasticidade de cisalhamento do material. 28 Ângulo de torção Torque e Área Transversal Constante : φ= T ⋅L IP ⋅G As semelhanças entre a equação acima e aquela para uma barra axialmente carregada devem ser notada: δ= P⋅L A⋅ E Torques Múltiplos. Se a barra for submetida a vários torques diferentes, ou a área da seção transversal ou o módulo de cisalhamento mudar abruptamente de uma região do eixo para a próxima, a anterior equação pode ser aplicado a cada segmento do eixo onde essas quantidades são todas constantes. φ = T ⋅L IP ⋅G 29 30 Convenção de signo Para aplicar esta equação, devemos desenvolver uma convenção de sinais tanto para o torque interno quanto para o ângulo de torção de uma extremidade da barra em relação à outra extremidade. Para isso, usaremos a regra da mão direita, por meio da qual tanto o torque como o ângulo serão positivos, desde que o polegar esteja direcionado para fora da barra quando os dedos se enrolarem para dar a tendência de rotação. 31 Convenção de signo Para ilustrar o uso desta convenção de sinais, considere o eixo mostrado na figura: TAB 80 N m M x = 0 ; TAB − 80 N ⋅ m = 0 TAB = 80 N ⋅ m 32 Convenção de signo 150 N m M x = 0 ; TBC + 150 N ⋅ m − 80 N ⋅ m = 0 TBC = −70 N ⋅ m TBC 80 N m M x = 0 ; TCD + 10 N ⋅ m = 0 TCD = −10 N ⋅ m TCD 10 N m 33 Exemplo 2 – Torção Quatro engrenagens são presas a um eixo circular e transmitem os torques mostrados na figura. A tensão de cisalhamento permitida no eixo é de 69 MPa. (a) Qual é o diâmetro requerido “d” do eixo se ele tiver uma seção transversal sólida? (b) Qual é o diâmetro externo requerido “dext” se o eixo for oco com um diâmetro interno de 25.4 mm.? 900 N * m 2100 N * m 400 N * m 800 N * m 34 Exemplo 2 – Torção Solução (a): 900N*m M T1 x = 0 ; T1 + 900 N ⋅ m = 0 T1 = −900 N ⋅ m 900N*m 2100 N*m M T2 x = 0 ; T2 − 2100 N ⋅ m + 900 N ⋅ m = 0 T2 = 1200 N ⋅ m 900N*m 2100 N*m 400 N*m M x T3 = 0 ; T3 + 400 N ⋅ m − 2100 N ⋅ m + 900 N ⋅ m = 0 T3 = 800 N ⋅ m 35 Exemplo 2 – Torção T(N*m) 1200 800 -900 τ max = r=3 T ⋅r T ⋅r = (π / 2)r 4 IP r3 = 2T π ⋅τ 2(1200 N ⋅ m) ≈ 0.0223m = 22.3mm 9 N π (69 x10 m 2 ) D = 2r = 44.6mm 36 Exemplo 2 – Torção Solução (b): τ max = T ⋅r T ⋅r = 4 IP (π / 2)(r 4 − rint ) (τ max )( π2 )(r 4 − rint ) = T ⋅ r 4 [(τ max )( π2 )]⋅ r 4 − T ⋅ r − [(τ max )( π2 )(rint 4 )] = 0 a ⋅ x 4 + b ⋅ x3 + c ⋅ x 2 + d ⋅ x + e = 0 [108385200 ]⋅ r N m 4 2 Solucionando a equação quadrática são obtidos 4 possíveis valores: [ ] − (1200 N ⋅ m) ⋅ r − 2.819 N ⋅ m 2 = 0 r1 = 0.023m r2 = −0.01 + i 0.019 r3 = −0.01 − i 0.019 r4 = −0.002 Desses 4 o único valor lógico é r1, então o diâmetro externo seria: Dext = 46mm 37 38