STEADY-STATE AND/TRANSffiNT STABILITY ANALYSES OF
advertisement
S T E A D Y - S T A T E AND/TRANSffiNT STABILITY A N A L Y S E S
OF MULTIMACHINE POWER SYSTEMS
USING FIVE DIFFERENT C A T A S T R O P H E M O D E L S
BY
KIN MING S U M
B . A . S c , UNIVERSITY OF BRITISH COLUMBIA, 1988
A THESIS SUBMITTED IN PARTIAL FULFILMENT OF
T H E REQUIREMENTS FOR
T H E M A S T E R D E G R E E OF APPLIED SCIENCE
IN
T H E F A C U L T Y OF G R A D U A T E STUDIES
D E P A R T M E N T OF E L E C T R I C A L ENGINEERING
We accept this thesis as confirming
to the required standard
T H E UNIVERSITY OF BRITISH C O L U M B I A
May 1998
©Kin Ming Sum, 1998
In
presenting this
degree at the
thesis
in
partial
fulfilment
of
the
requirements
University
of
British
Columbia,
I agree that the Library shall make it
freely available for reference and study. I further agree that
copying
of
department
this thesis for scholarly
or
by
his
or
her
purposes may be
representatives.
It
is
for
an
permission for extensive
granted by the
understood
that
publication of this thesis for financial gain shall not be allowed without
permission.
Department of
The University of British Columbia
Vancouver, Canada
DE-6 (2/88)
advanced
head of my
copying
or
my written
ABSTRACT
Steady-state and transient stability analyses are important in planning and operation of electric
power systems.
For large power systems, such analyses are very time consuming.
On-line
stability assessment is necessary for secure and reliable operation because power systems are
being operated close to their, maximum limits.
In the last three decades, research work has been done in the area of fast on-line assessment by
direct methods in order to minimize computational time.
In these methods, major difficulties
are power system modeling, stability system assessment, and adaptation to system operation.
Catastrophe theory was applied to study power system stability by Deng and Zhang for steadystate stability, assessment and by Wvong, Mihiring, and Parsi-Feraidoonian for transient stability
assessment.
Although the cusp catastrophe was proposed by Deng and Zhang to study the
steady-state stability assessment of power systems, no detailed formulation or specific results
were presented.
The swallowtail catastrophe was proposed to study the transient stability of
power systems by Wvong, Mihiring and Parsi-Feraidoonian, but research did not identify the
critical clearing angle values.
In this thesis, further research is done on using catastrophe theory for steady-state and transient
stability of power systems.
In this thesis,
different catastrophe models such as the fold, cusp,
swallowtail, butterfly, and wigwam catastrophes
assessment.
are derived for steady-state stability
The accuracy and limitations of these different catastrophe models on two test
systems (three-machine WSCC system and seven-machine CIGRE system) are discussed.
Five
catastrophe models are also derived for transient stability assessment of power systems.
The
'ii
critical clearing angle of the critical group of machines for two test systems for various balanced
three-phase faults are then determined using the cusp catastrophe model.
iii
TABLE OF CONTENTS
Page
1.
ABSTRACT
2.
T A B L E OF CONTENTS
3.
LIST OF TABLES
vl
4.
LIST OF FIGURES
vi?
5.
ACKNOWLEDGEMENT
vii
6.
CHAPTER 1
Introduction..
1
7.
CHAPTER 2
Application of Catastrophe Theory to Steady-State Analysis of
Multimachine Power Systems
4
8.
9.
CHAPTER 3
CHAPTER 4
10. R E F E R E N C E S
11. APPENDIX A
ii
*v
;
Application of Catastrophe Theory to Transient Stability
Analysis of Multimachine Power Systems
33
Discussion And Conclusions
51
:
Derivation of One-Machine Infinite Bus Dynamic Equivalents of
Multimachine Power Systems ..
54
56
12. APPENDLX B
Detailed Derivation of Control Parameters of Wigwam Catastrophe
Model (Steady-State Stability Analysis) ...
59
13. APPENDLX C
Three-Machine WSCC Test System Catastrophe Models Simulation
Results (Steady-State Stability Analysis)
61
14. APPENDIX D
Seven-Machine CIGRE Test System Catastrophe Models Simulation '
Results (Steady-State Stability Analysis)
72
15. APPENDIX E
Three-Machine WSCC Test System Catastrophe Model Simulation
Results (Transient Stability Analysis)
83
16. APPENDIX F
Seven-Machine CIGRE Test System Catastrophe Model Simulation
Results (Transient Stability Analysis)
,
87
LIST OF TABLES
T A B L E 2.2.1:
Single State Space Dimension Catastrophes
T A B L E 2.4.2:
Steady-State Catastrophe Models - Manifold and Control Parameters
T A B L E 2.5.1:
Three-Machine WSCC System - Pre-disturbance System Data
T A B L E 2.5.2:
Seven-Machine CIGRE System - Pre-disturbance System Data
T A B L E 2.5.3
Three-Machine WSCC System - Critical Mechanical Power Input Change
(Steady-State Stability) Determined by (a) Different Catastrophe Methods
(b) The E E A C Method
T A B L E 2.5.4:
Seven-Machine CIGRE System - Critical Mechanical Power Input Change
(Steady-State Stability) Determined by (a) Different Catastrophe Methods
(b) The E E A C Method
T A B L E 3.2.1
Transient Stability Catastrophe Models - Manifold and Control Parameters
T A B L E 3.3.1:
Three-Machine WSCC System - Critical Clearing Angle
(Transient Stability) Determined by (a) The Cusp Catastrophe Methods
(b) The E E A C Method
T A B L E 3.3.2:
Seven-Machine CIGRE System - Critical Clearing Angle
(Transient Stability) Determined by (a) The Cusp Catastrophe Methods
(b) The E E A C Method
LIST OF FIGURES
FIGURE 2.4.1:
Steady-State Analysis - A P Vs. Clearing Angle,
FIGURE 2.5.1:
Three-Machine WSCC System Configuration (three machine, nine buses)
FIGURE 2.5.2:
Seven-Machine CIGRE System Configuration (seven machine, seventeen
m
buses)
FIGURE 2.5.3:
The Cusp Catastrophe Bifurcation Set For Steady-State Stability
(Plot of w Vs. x Parameters)
FIGURE 2.5.4:
The Swallowtail Catastrophe Bifurcation Set For Steady-State Stability
(Plot of w Vs. x Parameters)
FIGURE 2.5.5:
The Butterfly Catastrophe Bifurcation Set For Steady-State Stability
(Plot of w Vs. x Parameters)
FIGURE 2.5.6:
The Wigwam Catastrophe Bifurcation Set For Steady-State Stability
(Plot of w Vs. x Parameters) - Generator
FIGURE 2.5.7:
The Wigwam Catastrophe Bifurcation Set For Steady-State Stability
(Plot of w Vs. x Parameters) - Motor
FIGURE 3.2.1:
Multimachine System for Balanced Three-Phase Fault (OMIB)
FIGURE 3.3.1:
The Cusp Bifurcation Set for Transient Stability
(Plot of w Vs. x Parameters)
ACKNOWLEDGEMENT
I would like to thank Dr. M.D. Wvong for his continual encouragement, invaluable and patient
guidance throughout the course of this research.
I would also like to thank my wife, Laura, for her encouragement and patience throughout my
graduate program.
vii
CHAPTER ONE
INTRODUCTION
Power system stability refers to the ability of synchronous machines to move from one steadystate operating point following a disturbance to another steady-state operating point, without
losing synchronism.
There are three types of power system stability, namely, steady-state,
transient, and dynamic stability [13] .
Steady-state stability involves slow or gradual changes in operating points.
Steady-state
stability studies are required to ensure that phase angles are not too large, that bus voltages are
close to nominal values, and that generators, transmission lines, transformers and other
equipment are not overloaded.
Dynamic stability involves an even longer time period, typically several minutes.
It is possible
for controls to affect dynamic stability even though transient stability is maintained.
The action
of turbine-governors, excitation systems, tap changing transformers, and controls from a power
. system dispatch centre can interact to stabilize or destabilize a power system several minutes
after a disturbance has occurred.
Transient stability involves major disturbances such as loss of generation, line switching
operations,.faults, and sudden load changes.
Following a disturbance, synchronous machines
frequencies undergo transient deviations from synchronous frequency (60Hz), and machine
power angles change.
The objective of a transient study is to determine whether or not the
machines will return to synchronous frequency with new steady-state power angles.
in power flows and bus voltages are also of concern.
Changes
In many cases, transient stability is
determined during the first swing of machine power angles following a disturbance.
During
the first swing, which typically lasts about one second, the mechanical output power and the
internal voltage of a generating unit are often assumed constant.
In large scale interconnected power systems, the greatest concern is security of the
when subjected to disturbances.
system
Hence, power system stability becomes an increasingly
important consideration in system planning and operation.
l
Extensive stability studies are
required to ensure system stability before a planning or operating decision is made.
Each
contingency for each disturbance considered requires a large number of stability studies to
determine the critical clearing angle or system stability limits.
A typical steady-state and transient stability study consists of obtaining time solution to power
system differential and algebraic equations with initial system conditions.
The power system
equations should include all significant parameters that influence stability such as generator
controls, stability controls and protective devices. Although the time solution of stability
analysis is very reliable and accurate, it has the following limitations:
1.
The process is very time consuming in the system planning stage where a large number of
cases need to be considered.
2.
In systems where immediate operational decisions need to be made, time solutions may not
provide fast enough on-line assessment.
3.
The power system operating conditions change during the course of the day and the time of
the year, while stability studies are done off-line for certain severe cases.
This leads to
improper decisions in some cases and hence may increase expenditures.
Therefore, fast and reliable assessment methods should be provided for operators to make
prompt on-line decisions.
to be studied off-line.
Also, these fast direct methods will help reduce the number of cases
The desired method for fast analysis of transient stability should satisfy
the following criteria:
1.
Provide a fast and reliable answer to indicate whether the system is stable or not when a
specified disturbance is encountered.
2.
Provide the necessary information to indicate the degree of system stability so that the
operators can ensure system security.
3.
If fast methods are to be used for on-line purposes, it must be adaptable to changes in
operating conditions, different disturbances and stability controls.
2
Extensive research has been conducted in this area, but little has been achieved.
Catastrophe
theory was proposed in [7,14,15,18] as an alternative fast on-line method to determine power
system stability.
The cusp catastrophe was proposed [7] to study the steady-state stability of
power systems, but no specific result arid formulation were presented.
In [14,15,18], the
swallowtail catastrophe was used to study transient stability of power systems, but no work has
been done to determine the
critical clearing angle values.
The motivation of this research is to exterid catastrophe theory as an alternative for fast on-line
method to determine steady-state and transient stability of power systems.
In Chapter Two, different steady-state catastrophe models of the fold, cusp, swallowtail,
butterfly, and wigwam catastrophes will be developed to study stability limits of power systems
by determining their maximum mechanical power input change for two test power systems;
namely, the three-machine WSCC system [11] and the seven-machine CIGRE system [12].
Stability limits obtained from the Extended Equal Area Criteria (EEAC) method [1] will be used
as a bench mark to evaluate results obtained from the catastrophe models.
accuracy of these catastrophes will be discussed.
Limitations and
Note that the E E A C method determines the
stability limit when the potential energy which can be absorbed by the post-disturbance power
system equals the kinetic energy generated by accelerating power during the disturbance period.
In Chapter Three,
different catastrophe models is formulated for transient stability in power
systems with balanced three-phase faults.
Critical clearing angles of the system will be
determined by the cusp catastrophe and the E E A C method for the same two test power systems
(WSCC and CIGRE systems) .
Accuracy of catastrophe result can be determined by
comparing with the result of E E A C method.
Chapter Four concludes the achievement of this project and gives suggestions for future
research.
CHAPTER TWO
APPLICATION OF CATASTROPHE THEORY TO STEADY-STATE
OF MULTMACHINE POWER SYSTEMS
2.1 Introduction
Any physical system that is designed to perform certain pre-assigned tasks in steady-state
must remain stable at all times for sudden disturbances with an adequate safety margin.
In
a large physical system such as a modern interconnected power system, analytical
techniques are required to interpret the region of system stability.
Since the famous blackout in north-eastern. U.S.A. in 1965, considerable research work
has been done in power systems to prevent future recurrence and ensure secure and reliable
operation.
stability [1].
Much work has been done in the area of direct and fast assessment of transient
Promising results have been achieved with energy functions [2,3] and pattern
recognition [4].
Catastrophe theory has been applied to the study of various dynamic systems [5] and in
recent years to the steady-state stability analysis of power systems [6,7].
An attractive
feature of catastrophe theory is that the stability regions are defined in terms of the
catastrophe control parameters bounded by lines of stability limits.
Deng and Zhang [7]
proposed using the cusp catastrophe to study the steady-state stability of power systems,
but did not show any particular formulation and specific results.
In this chapter, the cusp, swallowtail, butterfly, and wigwam catastrophe models of
interconnected multimachine power systems are proposed for the study of steady-state
stability subjected to change in mechanical power input.
The critical mechanical power
input change (maximum mechanical power input before system instability) will be obtained
from these catastrophes and the results will be compared with that obtained from using the
extended equal area criterion (EEAC)[1].
The E E A C method uses the following criterion
to determine the maximum mechanical power input change of power systems, the system
remains stable if the kinetic energy generated by changing of mechanical power input of the
4
system is less than or equal to the potential energy available which can be absorbed during
the post disturbance period (Specifically, area A l is smaller or equal to area A2 in Figure
2.4.1).
.
The structure of this chapter is briefly described as follows. First, a brief review of
catastrophe theory will be presented in Section 2.2
followed by formulation of
multimachine power system dynamic equivalents in Section 2.3.
In Section 2.4, five
catastrophe models for steady-state analysis of multimachine power systems will be
introduced.
These catastrophe models will be applied to the three-machine WSCC system
[11] and to the seven-machine CIGRE system [12].
test systems will be discussed in Section 2.5.
Section 2.6.
5
Results and observations of the two
Finally, conclusions will be stated in
Catastrophe Theory
Catastrophe theory was originally presented by Professor Rene Thorn and published in his
book "Structural Stability and Morphogenesis" [8].
explain sudden changes in morphogenesis.
Thorn used differential topology to
This theory explores the region of
sudden
changes in dynamic systems and deals with the properties of discontinuities directly.
It
has been defined as the study from a qualitative point of view of the ways the solutions to
differential equations may change [9],
Natural phenomena such as the sudden collapse of
bridges and the phase change of water from liquid to solid can be well described by use of
catastrophe theory.
Catastrophe theory can be briefly described as follows.
Consider a system whose
behaviour is usually smooth but which exhibits some discontinuities.
Suppose the system
has a smooth potential function to describe the system dynamics and has "n" state variables
and "m" control parameters.
following:
Given such a system, catastrophe theory tells us the
The number of qualitative different configurations of discontinuities that can
occur depends not on the number of state variables but on the number of control
parameters.
four,
Specifically,
if the number of the control parameters is not greater than
there are seven basic or elementary catastrophes, and in none of these are more than
two state variables involved [10].'
Consider a continuous potential function V(Y,C) which represents the system behaviour,
where Y are the state variables and C are the control parameters.
The potential function
V(Y,C) can be mapped in terms of its control variables C to define the continuous region.
Let the potential function be represented by
V(Y,C):M®R
(
where M , C are manifolds in the state space R and the control space R respectively.
n
r
We now define the catastrophe manifold M as the equilibrium surface that represents all
critical points of V(Y,C).
It is the subset of R X R
n
. VYV (Y) = 0
r
defined by
,
C
.
(2.2)
where V ( Y ) = V ( Y , C ) and W i s the partial derivative with respect to Y .
C
Equation 2.2 is
the set of all critical points of the function V(Y,C).
Next, we find the singularity set, S, which is the subset of M that consists of all degenerate
critical points of V.
V VC(Y) = 0
These are the points at which
and V Y V ( Y )
2
Y
C
=0
(2.3)
The singularity set, S, is then projected down onto the control space R by eliminating the
r
state variables Y using Equations (2.2) and (2.3), to obtain the bifurcation set, B.
The
bifurcation set provides a projection of the stability region of the: function V bounded by
the degenerate critical point at which the system exhibits sudden changes when it is subject
to small changes.
Let us illustrate this process by considering the cusp manifold (one of the elementary
catastrophe).
The cusp manifold equation is represented as
V V ( Y ) = y + wy + x = 0
(2.4)
3
Y
C
where y is the only state variable and w , x are the control parameters and therefore
V y Vc(Y) = 3 y + w = 0
2
(2 5)
2
By algebraic manipulation of Equations (2.4) and (2.5), the cusp bifurcation set may be put
in the form of
4 w + 27x = 0
3
(2.6)
2
7
Equation (2.6) describes system stability boundary.
Table 2.2.1 summarizes the single
state space dimension of different catastrophe manifolds
Catastrophe Control
Space
Fold
1
State
Space
Function
Catastrophe Manifold
1
y /3+xy=0
y +x=0
3
2
Cusp
2
1
y /4+wy /2+xy=0
y +wy+x=0
Swallowtail
3
1
y /5+vy /3+wy /2+xy=0
y -r-vy +wy-r-x=0
Butterfly
4
1
y /6+ y /4+vy /3+wy /2+xy=0
y +uy +vy -rwy+x=0
y /7+ty /5+uy /4+vy /3+wy /2+xy=0
y +ty -ruy +vy +wy+x=0
4
2
5
3
6
4
3
2
3
4
2
U
Wigwam
5
1
7
5
4
3
2
2
5
6
y is state variable and t, u, v, w, x are control parameters
3
4
3
.
Table 2.2.1: Single State Space Dimension Catastrophes
8
2
2
2.3 Dynamic Equivalents of Multimachine Power System
The swing equation of generator i in a power system of n-machines is given by:
m; 8; + d; 8;
Pa - Pm;" Pe?
;
i = 1,2,3,
,n
(2.7)
where
n
E [E; Ej (gy cos 8ij + bij sin Sy)]
Pe
;
(2.8)
j=i
8;
=
internal rotor angle of generator i
m;
=
inertia constant of generator i
d;
=
damping coefficient (assume zero for simulation purpose)
p .
=
mechanical power input of generator i
p.
=
electrical power output of generator i
p.
=
accelerating power of generator i
m
e
a
'
gij,by =
real and imaginary parts of reduced nodal admittance matrix .
8jj
8; - Sj
=
Ei, Ej =
internal voltages of generator i, j.
Under steady-state conditions, Pa; equals zero and 8; is constant.
When a system is
subject to a disturbance, Pa; becomes different from zero and Equation (2.7) describes the
behaviour of 8; with time.
For generator i to be stable, 8i must assume a constant value
and Pa; must be zero.
When a disturbance occurs in a large system, only a few machines are affected and these
tend to oscillate against the rest of the system.
machines; the other machines are non-critical.
9
These machines are called critical
The group of critical machines, j = 1, 2', 3, ..., k may be represented by a single equivalent
machine with an inertia constant and rotor angle, respectively, of:
M
k
6k
=
k
£ mj
j=i
(2.9)
=
I k
— £ mj8j
M
.
(2.10)
j = 1
k
Similarly, the group of non-critical machines, j = k+1, k+2, k+3, . . n may be represented
by another single equivalent machine with an inertia constant and rotor angle, respectively,
of:
Mo
n
Z
-
nij
(2.H)
j=k+l
8
0
V
I n
=
— £ mj5j
• Mo J k-l
'
(2.12)
By suitable algebraic manipulation, the swing equation for the group of critical machines
can be put in the form of:
M¥k=P -Pc-TkSin(y +a )
m
k
k
(2.13)
where
Mo M
M
k
=
(2.14)
M +M
0
k
Mo-Mk
V
=
(2.15)
Mo + M
^k
=
5 -5
k
k
(2.16)
0
10
Mo
Pm
=
M
k
—
• E.Pmj
M +M
0
j
„
k
"
Mo+Mk
1
k
EPnij
(217)
j = k + 1
M„
M
P= [
E E EiEj (gy cosSy + by sin5,j)]-[E
Mo+M
'.. ' M + M
k
k
k
n
n
£ EEj (g cosSy + by sinSy)] (2.18)
c
i = l j = 1
k
T
k
=
0
VAk + B
2
k
(2.19)
2
k
kn
E E [ E i Ej (u
Ak
y
i = k + l j = k + 1
g i j
cos (8 - Te) + b sin (8 - T ) ) ]
U
y
y
(2.20)
k
i-lj-k+l
B
a
k
k
kn
E E [ E ; Ej (by cos (8ij - T ) - u
i=lj=k+l
•=
k
=
g i j
sin (8 - Tk)) ]
(2.21)
;j
tan - (Ak /B )
(2.22)
1
k
or by defining
Mi
8;-8
i = 1,2,3,.'.
=
• (p; =
k
8i - 8
0
, k critical machines
(2.23)
i = k+l,k+2,...., n non-critical machines
(2.24)
P , Ak and B may be represented in the form of:
c
k
Mo k k
M
=[
— £ EEiEj (gijCOSTiij+bijSinriijJl-f
£
Mo+M
.
Mo+Mk
k
p
c
,=,J=1
n
n
£ EEjfejCos co ij+bySin (p )] (2.25)
;j
,=k+lj=k+1
k
Ak
=
kn
E E [ E i E j ( p g j C O s ( r i i - ( / ) j ) + bijSin(rii-(p ))]
i=lj=k+l
(2.26)
Bk
='
kn
E E [ E ; Ej (by cos fa - <?J) - U g sin fa - 0j))]
i=lj=k+l
(2.27)
i
j
;j
Detailed derivation of the above is presented in Appendix A.
n
2.4. Multimachine Power System Steady-state Stability Catastrophe Theory Model
/
p
0
/M/
/
- P +TkSinOF + a )
0
k
k
7
0
m
"
/
o
k
i
1
m c
ik
^k
\
V
u
Angle, Tk
Figure 2.4.1: Steady-State Analysis - A P Vs. Clearing Angle, *¥
m
k
With reference to Figure 2.4.1 and using the extended equal area stability criterion (EEAC)
of Equation (2.13), we have:
S [ P ° + A P - P - T k sin(T +a )]dTk + S [ P ° + A P - P c - T s i n ( ^ + a k ) ] d ^ k = 0 (2.28)
m
m
c
k
k
m
m
k
k
for the limiting case of the system to be stable, i.e.
(P ° + A P
m
-P)W
m
- TO + T cos ( ¥
c
k
c
k
+ at) - T cosCFk + a )
0
k
k
+ (P^ + A P - P c ) ( ^ k - T O + TkCOs(Tk + a k ) - T c o s ( ^ k + ak) = 0
u
u
m
c
k
(2.29)
After algebraic manipulation, Equation (2.29) may be put in the form of:
(P
o
m
+ A P - P c ) ( % - T O + Tk[cos(^
u
m
u
k
+ ak)-cos( Pk + a )] = 0
v
O
k
(2.30)
where
P °- P
1
^
=
sin
m
A c
a
1
T
k
k
12
(2.31)
Pm° + A P - P
m
T
=
c
k
sin
:
1
c
•
a
k
P ° + AP -P
c
T
k
m
W
m
TT-sin —
=
(2.32)
=
1
T
a
(2.33)
k
k
P °
=
initial value of the mechanical power input
(2.34)
P
=
new value of the mechanical power input
(2.35)
AP =
P
-P °
(2.36)
T
W+ATk
(2.37)
m
n
m
m
n
m
m
Let
=
u
k
Equation (2.30) may be represented in the form:
(P
0
r a
+ A P - P ) A F + T [ c o s C F ° + a ) ( c o s A P - l ) - s i n ( ¥ + a k ) s i n A ¥ k ] = 0 (2.38)
v
m
c
x
k
k
k
k
0
k
k
Grouping like terms of A *Fk, Equation (2.38) becomes :
K AT
1
+ K cos(A Pk) + K 3 s i n ( A T ) - K 2 = 0
(2.39)
v
k
2
k
where
K,
=
(Pm°+AP -P )
K
2
=
T cos(T ° + a )
(2.41)
K
3
=
- Tk sin(T ° + at)
(2.42)
m
k
k
(2.40)
c
k
k
Note that parameter K i is the only parameter which is dependent upon of A P .
m
13
2.4.1Series Expansion of sin( A T k ) and cos( A T k )
AT
is unknown in Equation (2.39) and would normally require an iterative approach to
k
solve.
The iterative approach can be avoided by use of catastrophe theory after series
expansion of sin( A T ) and cos( A Tk) to get:
k
AT
K,AT +K
k
1
2
AT
2
k
AT
4
k
AT
6
k
}+K { A T
+
3
* 2!
4!
AT
3
k
5
k
AT
7
k
} - K = 0(2.43)
k
2
6!
3!
5!
7!
Equation 2.43 can be put in the form of
AT
(K!+K )-K
3
AT
k
K
2
2!
AT
2
k
+K
3
AT
3
k
+K
2
3!
AT
4
k
K
3
4!
5!
2
AT
5
k
— '-K
6!
6
k
+.. = 0 (2.44)
3
7!
Let
AT
y + 15
k
(2.45)
so that
(AT )
2
= (y + fi)
= y +2fly+A
(AT )
3
= (y + fi)
= y +3By +3fl y+^
(ATk)
4
= (y + fi)
= y +4fiy +6ft y +4Ji y+^
(AT )
5
= (y + Ji)
5
= y +5fiy +10B y +10fiy+5Ji y+J5
(AT )
6
= (y + Ji)
6
= y ^&fn5&y+26&Y+l5&¥+6E> y+E>
(AT )
7
k
2
k
k
4
= (y + fi)
7
-
2
3
3
k
k
2
2
4
3
5
4
2
2
2
2
(2.47)
3
3
(2.48)
4
3
4
6
(2.49)
5
5
(2.50)
6
= y +7fiy +21B y +35l5y+35B y +21B y +7B y+ft
7
6
2
(2.46)
5
4
3
5
2
6
7
(2.51)
By selecting as many terms of A Tk in Equation (2.44) as needed and choosing p such that
the coefficient of the appropriate term in the catastrophe manifold equation becomes zero,
different orders of catastrophe manifolds may be derived.
This procedure is detailed in the following sections.
14
2.4.2Wigwam Catastrophe
Selecting terms of A Y k to the sixth degree and normalizing A Y k , Equation (2.44) may
6
be put in the following form:
K2
AT + 7
K.2
6
k
K.3
A ^-42 A ¥^-210
K2
K1+K3
A P +840A F +2520
A ^-5040
K3
K3
K3
x
3
k
x
2
k
- = 0 (2.52)
P, expand (y+P) where n = 1, 2,..,6, and make the coefficient
n
Substitute A ^ = y +
of y
zero so that:
K
2
K
3
6p + 7
= 0,
7K
or
(2.53)
2
P=
(2-54)
6K
3
Hence we get the wigwam manifold equation
y + ty + uy + vy + wy + x = 0
6
4
3
' '
2
(2.55)
and it may be shown that (see Appendix B)
t
=
- 4 2 - 15p
(2.56)
u
=
4p(3-10p )
v
=
840 + P (288 - 45p )
w
-
- 1 2 p ( 4 0 - 3 1 p + 2p )
x
=
- p ( 1320 - 138p + 5 p ) - 5040
2
(2.57)
2
2
(2.58)
2
2
.
4
(2.59)
K, + K
2
2
3
(2.60)
4
Note that K i is the only parameter which varies as A P varies; K and K remain constant.
m
2
3
Hence, P remains constant and x is the only control parameter which varies with A P .
m
15
5
2.4.3Butterfly Catastrophe
Selecting terms of A T k to the fifth degree and normalizing A T k , Equation (2.44) may
5
be put in the following form:
K3
AT
5
k
K3
- 6-
AT
K
-30 A T
4
k
3
k
+120
AT
K
2
Substitute A T k = y + p, expand
(y+P)
n
K1+K3
2
k
+360 A T
k
-720
=0
(2.61)
K2
2
where n = 1, 2,..,5, and make the coefficient of y
4
zero so that:
P
-
6K
3
(2.62)
5K
2
Hence we get the butterfly manifold equation
y + uy + vy + wy + x = 0
5
3
(2.63)
2
where
u
=
-30-10p
(2.64)
v
• =
w
=
5p (22 - 3 p ) + 360
x
=
-p ( 240 - 70p + 4p ) - 720
2
10P(l-2p )
(2.65)
2
2
(2.66)
2
K,
2
(2.67)
4
K
. .
2
Note again that K i is the only parameter which varies as A P varies; K and K remain
m
constant.
2
3
Hence, P remains constant and x is the only control parameter which varies
with A P .
m
16
2.4.4SwaIIowtail Catastrophe
Selecting terms of A
to the fourth degree and normalizing A ^k , Equation (2.44) may
4
be put in the following form:
K
K
2
A^k + 5:
3
Substitute A ^ k = y +
A Y k + 120—:
2
K3
K1+K3
2
A ^ k - 20 A ^ k - 60
4
K3
=
0
(2:68)
K3
P, expand (y+P) where n = 1, 2,..,4, and make the coefficient
n
of y
zero so that:
5K
P
2
=
(2,69)
4K
'
3
Hence we get the swallowtail manifold equation
4
y
+ vy + wy + x = 0
(2.70)
2
where
v
-
- 20 - 6p
(2.71)
w
=
8P ( 1 - p )
2
(2.72)
2
K, + K
x
=
3
P (28-3P )+ 1 2 0 2
2
(2.73)
K
3
Note again that K\ is the only parameter which varies as A P varies; K and K remain
m
constant.
2
3
Hence, p remains constant and x is the only control parameter which varies
with A P .
m
17
3
2.4.5Cusp Catastrophe
Selecting terms of A T to the third degree and normalizing A T k , Equation (2.44) may
3
k
be put in the following form:
K3
AT
K1+K3
- 4 -- —
3
k
AT
2
2
k
k
- 1 2 A TTk ++ 24
24-—
k
K?
Substitute A T
k
=0
(2.74)
K 9
=
y + P, expand (y+P) where n = 1, 2,3, and make the coefficient
n
of
y
zero so that:
. 4K
3
(2.75)
3K
2
.
Hence we get the cusp manifold equation
(2.76)
y + wy + x = 0
3
where
w
=
-12-3p
(2.77)
x
=
2P (3 - p ) + 24
2
Ki
.
(2.78)
2
K
2
Note again that K i is the only parameter which varies as A P varies; K and K remain
m
constant.
2
3
Hence, P remains constant and x is the only control parameter which varies
with A P .
m
18
2
2.4.6FoId Catastrophe
Selecting terms of A^Pk to the second degree, normalizing A ^ k , Equation (2.44) may
2
be put in the following form:
K
AY
2
k
K1+K3
2
A
T -6—
k-6
AV
+3
—
k
K3
K
Substitute A Y k = y +
=0
(2.79)
3
P, expand (y+P) where n = 1, 2, and make the coefficient
n
of y zero,
we find P as follows:
3K
P
3
=
(2.80)
2K
-
2
Hence we get the fold manifold equation
y +x=0
(2.81)
2
where
K, + K
.
x
=
3
- P - 6—
.
2
K
(2.82)
3
Note : The fold catastrophe will not be used for simulation tests because x is the only
control parameter of this catastrophe and would require plotting of x control parameter and
state variable y
;
19
2.4.7Extended Equal Area Criterion (EEAC) Method
The E E A C method will be used as the reference method to determine the accuracy of the
simulation results obtained from the cusp, swallowtail, butterfly, and wigwam catastrophes
for two test systems (three-machine WSCC and.seven-machine O G R E systems).
Critical
mechanical power input change, A P , of power systems can be determined when area A l
m
is equal to area A2 in Figure 2.4.1.
Mathematically, area A l and A2 can be evaluated as follows:
T \
k
AreaAl
= $ [ P ° + A P - P - T sin(T +a )]dT
m
m
c
k
k
k
(2.83)
k
T °
k
AreaA2
= - $ [P °+AP -P -T sin( P +a )]dT
v
m
m
c
k
k
k
(2.84)
k
After algebraic manipulation, Area (A2 - A l ) can be determined by :
Area (A2-A1) = T
[cos(W + a ) - c o s ( T ° + a ) ] - ( P ° + A P - P ) ( T - T ) (2.85)
u
k
k
k
k
m
m
c
k
p
k
From energy standpoint, area A l is the kinetic energy generated by accelerating power due
to mechanical power input change, APm and area A2 is the required potential energy
which can be absorbed by the post disturbance system.
2.4.8Sunimary of catastrophe manifold and control parameters
All control parameters of the cusp, swallowtail, butterfly, and wigwam catastrophes'
manifold are summarized in Table 2.4.2.
20
ro
ro
+
'
/-—s
m
©
o
^—\
CO.
o a
+
+
CN
c a
ro
•
i
1
00
CS
o
CS
c a
/
c a
•
CO
c a
CS
r-H
CN
Cd.
1
CN'
i
i—i
*-—' '
CN
CN
o a
o
t-
©
CN
ro
CS
+
o
CS
CN
CQ.
00
ro
c a
CU
+•>
co.
<u
e.
CO..
o
+
CO
+
CN
o a
*—i
o a
1
O
i—l
>
CN
CS
CS
c a
CN
.
si
•
c a
CO
ro
>he Models: Manifold and Control Pan
:ATASTROPHE CONTROL PARAMETERS
ro
/-^
1
'
CO
o
CS
CN
c a
CO
1
. CS
1
CN
o a
.ca
00
CN
c a
m
CN
t
c a
1
1—1
•
o
CS
c a
o
CN
c a
+
O
CN
c a
CS
00
00
<N
1
-
00
/—\
a
c a
©
i—i
•
ro
c a
•*
O
l.
•«->
V)
«
«
CN
c a
o
t-H
1
o
CO
u
. 1
cu
CS
CN
c a
• >ri
1
* J
1
CS
«
cu
CZ5
N-<
ca
i4
CN
• r14
.
•
CN
>n
CS
CN
i4
ND
CO
•
1
CATAS TROPHE MODELS
-
o
H
"II
"w
PH
II
i
X
>
o
II
X
o
+
>
II
+
•
X
+
+
>
>
+
l':
CU
«
o
c
fN
cu
s
pa
.
©
II
X
+
II
X
+
"3
:S
a.
o
• CJ
t/3
o
S
•2
"o
2.5 Simulation Results
The catastrophe models described in Section 2.4 are applied to the three-machine WSCC
system [11] and the seven-machine O G R E system [12].
These catastrophe models were
used to determine the critical mechanical power input, A P , to power systems before the
m
system becomes unstable.
Results obtained from these catastrophes were compared with
that obtained from the E E A C method.
The E E A C method use the following criterion to
determine system stability: when area A1 exceeds area A2 in Figure 2.4.1, system will
become unstable.
Critical A P
m
is determined when area A l is equal to area A2.
Refer
to Section 2.4.6 for detailed formulation of the E E A C method.
Since no definitive method exists for assigning machines to be critical [1], exhaustive
combination ( single, double, etc.) of machines were considered as the critical group in the
simulation.
Configurations of the three-machine WSCC and seven-machine CIGRE systems are shown
in Figure 2.5.1 and 2.5.2.
18kV
System data are shown in Table 2.5.1 and 2.5.2.
230kV
LoadC
230kV
13.8kV
®
©
®
Load A
LoadB
•©
©
Fig. 2.5.1 - Three-Machine WSCC System Configuration (three machines, nine buses)
22
Bus
No.
Volt.
Mag. /p.u.
1
2
3
4.
5
6
'
7
8
9
1.04
1.02
1.02
1.02
0.99
1.01
1.02
1.01
1.03
.
Volt.
Ang
0.00
9.30
4.70'
-2.200
-4.000
-3.700
3.70
0.70
2.00
'
Real Gen.
Power / p.u.
0.71
1.63
0.85
0.00
0.00
• 0.00
• 0.00
0.00
0.00
Imag.Gen
Pwr /p.u.
0.27
• 0.06
-0.109
0.00
0.00
0.00
0.00
0.00
0.00
Generator Data
RealLoad
Power /p.u.
0.00
0.00
0.00
0.00
1.25
0.90
0.00
1.00
0.00
Imag. Load
Power /p.u.
•
0.00
0.00
0.00
0.00
0.50
0.30
0.00
0.35
0.00
R+X'd /p.u.
0.000
0.000
0.000
0.060
0.119
0.181
•
_
_
_
_
•
_
_
_
•
_
_
Transimission Line
Bu
From
•
1
2
3
4
4
5
6
7
8
Admittance
To
4 .
•7
9
5
6
7
9
8
9
0.00
0.00
0.00
1.365
1.942
1.187
1.28
1.617
1.155
Shunt/2
. • _
-
_
-
0.00
0.00
0.00
0.00
0.00
0.00
_
_
.•
0.08
0.07
0.15
0.17
0.074
0.104
Table 2.5.1: Three-Machine WSCC System - Pre-Disturbance System Data
Fig. 2.5.2
Seven-Machine CIGRE System Configuration ( seven machines, seventeen buses )
23
CIGRE system data before disturbance (7 machines 17 buses)
Generator
Bus
Pbase
X
' M
Pm
E
Angle
(MVA)
(%) >
(MWsVrad)
(MW)
(D.U.)
(dee)
1
100
7.4
6.02
217
1.106
7.9
2
100
11.8
4.11 120
1.156
-0.2
3
100
6.2
7.59
256
1.098
6.5
4
100
' 4.9
9.54
300
3.9
•1.11
5
100
7.4
6.02
230
1.118
7
6
100
7.1
6.77
160
1.039
3.6
7
100
8.7
5.68
174
1.054
7.9
Loads
Bus-"
p
O
Bus
P
O
(MW)
(Mvar)
(MW)
(Mvar)
17
200
120
9
100
50
- 13
650
405
. 11
230
140
10
80
30
• 15 •
90
45
8
90
40
Transmission Line Data
•
Bus '
R
X
wC/2
From
To
(ohm)
(ohm)
(micro S)
16
12
5
24.5
. 200
16
13
5
24.5
100
17
12
22.8
62.6
200
17
15
8.3
32.3 ••
300
12
13
6
39.5
300
12
11
5.8
28
200
13
14
2
10
200
13
10
• 3.8
10
' 1200
13
11
24.7
97
200
13
15
8.3
33
300
10
,9.5
31.8
9
200
8
9
•6
39.5
300
9
11
24.7
97
200
Note:
These values include the transformer's reactances and are expressed on a 100 MVA
( 1
(1)
Table 2.5.2: Seven-Machine CIGRE System - Pre-Disturbance System Data
24
2.5.1Three-Machine WSCC System
For the WSCC system, different combinations of machine(s) are grouped together to form
the critical machine group and the non-critical machine group. These combination groups
are applied for the cusp, swallowtail, butterfly, and wigwam catastrophe models and a
typical simulation result is summarized in Appendix C. Mechanical Power Input is the
implicit state variable for catastrophe manifolds and followings are the observation:
1.
Catastrophe bifurcation set describes a definite envelope for system stability region
boundary.
Different catastrophe has its own bifurcation envelope for control
parameters w and x, and these envelopes are graphed in Figures 2.5.3, 2.5.4, 2.5.5,
2.5,6, and 2.5.7.
0
/
\
C u s p Catastrophe Bifurcation
Envelope
\
/
^PM
•%
S
M o t o r Stable Region
increase
/
—
\
^
jBenerator Stable R e g i o n /
>.
X
Fig 2.5.3: The Cusp Catastrophe Bifurcation Set For Steady-State Stability
(Plot of w vs. x Parameters)
25
0
w
CtXnerator R egion
N
s
Pm increase
\
(
^X^x^^^V^
^ ' ^
^
>Ss
>^
s
S w alio w ta il C a tastrophe B ifurcation
Envelope
^ ^ ^ ^
^**>>^
X
Fig 2.5.4:The
Swallowtail
Catastrophe Bifurcation Set For Steady-State
Stability
(Plot of w vs. x Parameter)
.
/
^^^*s«^/
Generator Regions
Pirymcrease
/
/
r
Butterfly Catastrophe Bifurcation —H)C
Envelope
^ ^ C / ^
X
Fig 2.5.5: The Butterfly Catastrophe Bifurcation Set For Steady-State Stability
(Plot of w vs. x Parameter)
26
•
X-
^ Ji/
Pm increase \
Generator
Wigwam Catastrophe Bifurcation
. Envelope
\
o
Fig 2.5.6: The Wigwam Catastrophe Bifurcation Set For Steady-State Stability
(Plot of w vs. x Parameter) - Generator
o
w
Motor stability
Pjn-4rrCfease
/
\^
\^
/
Wigwam Catastrophe Bifurcation
Envelope
X
Fig 2.5.7: The Wigwam Catastrophe Bifurcation Set For Steady-State Stability
(Plot of w vs. x Parameter) - Motor
27
2.
For the three-machine WSCC system, there are six possible critical machine group
combinations, namely three (3) one-machine and three (3) two-machines groups.
The
combination with the least mechanical power input change prior to reaching the unstable
region is taken to be the critical machine group for one-machine-infinite-bus (OMIB)
model. From our test, Machine 2 as the sole critical machine is the proper combination
choice.
3.
If Machine 2 is used as the critical machine for OMIB model and acts as a generator, then
the choice using Machines 1 and 3 as critical machines would have mirror performance in
the bifurcation plane but acting as an equivalent motor.
4.
The cusp catastrophe bifurcation plane (x-w plane) is described in Figure 2.5.3 which
shows that:
a.
Generator lies onrighthalf plane (i.e. x > 0) while motor lies on in the left half plane.
b.
Bifurcation set divides the x-w plane into stable and unstable region.
Shaded area in
Figure. 2.5.3 denotes the stable region.
c.
When mechanical power input of the system increases,
value of 'w' parameter
remains constant and that of x parameter increases.
d.
Bifurcation curve in the 'x-w' plane is symmetrical at line x equals zero.
e.
If w parameter remains constant, two possible x limit values can be found from the
bifurcation curve; these values determine a transition value of a system from stable
operation to unstable operation.
5.
The swallowtail catastrophe bifurcation plane is described in Figure 2.5.4 which shows that:
a.
Generator lies on the lower half of 'x-w' plane (i.e. w < 0) while motor lies on the
upper half plane.
b.
Similar to the cusp catastrophe, the swallowtail bifurcation set also defines a stable
envelope for system stability; shaded area defines the stable region for generators.
28
c.
For a particular critical machine group, u and v parameters remain constant and x
parameter varies as mechanical power input of the system varies (In the 'x-w' plane,
if w parameter is greater than zero, x parameter increases as mechanical power input
of the system increases. However, if w parameter is less than zero, x parameter will
decrease as mechanical power input of the system increases.).
d.
Bifurcation curve in 'x-w' plane is symmetrical at line w equals zero.
e.
Three possible limit values of x parameter can be found if that of w parameter remains
constant.
The butterfly catastrophe bifurcation plane is described in Figure 2.5.5, which shows that:
a.
Generator lies on the left half of the 'x-w' plane (i.e. w < 0) while motor lies on the
right half plane.
b.
Butterfly bifurcation curve also defines a stable region for system stability.
Shaded
area defines the stable region generators.
c.
For a particular critical machine group, values of u, v and w parameters remain
constant and that of x parameter varies as mechanical power input of the system
varies;
specifically, x parameter decreases as mechanical power input of the system
increases.
d.
Butterfly stability envelope is similar to that of the cusp envelope except that the left
half plane and the right half plane of the bifurcation curve is not symmetrical at x
equals zero (Note also that if v parameter changes sign, bifurcation curve in the left
half of 'x-w' plane will sits on the right half plane while that on the right half plane will
sits on the left).
e.
Four possible limit values of x parameter can be found from the bifurcation curve if w
parameter remains constant.
29
7.
The wigwam catastrophe bifurcation plane is described in Figure 2.5.6 and 2.5.7, which
shows that:
Shaded area in Figure 2.5.6 denotes generator stable region (if parameter u is
negative) and shaded area in Figure 2.5.7 denotes motor stable region (if parameter u
is positive).
For a particular critical machine group, values of u, v and w parameters remain
constant and that of x varies as mechanical power input of the system varies;
specifically, x parameter value increases (if u is negative) or decreases (if u is positive)
as mechanical power input of the system increases.
c.
Five possible limit values of x parameter can be found from the bifurcation curve if w
parameter remains constant.
8.
Different catastrophe bifurcation envelopes are used to determine the maximum change of
mechanical power input in power systems before instability occurs and results are compared
with that obtained from the E E A C method.
Table 2.5.3. summarizes the results.
CRITICAL
MACHINES
2
3
2 and 3
EEAC (AP )
1.387184 p.u
1.460789 p.u.
1.484128 p.u.
m
CATASTROPHE
MODELS
AP .
% Error
AP .
% Error
AP .
% Error
Cusp
1.27761 p.u.
7.899%
1.3396 p.u.
8.296%
1.36613 p.u.
7.951%
Swallowtail
1.3342 p.u.
3.820%
1.3811 p.u.
5.455%
1.428 p.u.
3.782%
Butterfly
1.3993 p.u.
-0.873%
1.4779 p.u.
-1.171%
1.4974 p.u.
-0.894%
Wigwam
1.3914 p.u.
-0.304%
1.4696 p.u.
-0.603%
1.494 p.u.
-0.665%
m
m
m
Table 2.5.3: Three-Machine WSCC System-Critical Mechanical Power Input change
(Steady-State Stability) Determined by (a) Different Catastrophe Models
(b) The E E A C Method
Note: %Error = [(EEAC Value - Catastrophe Value)
30
E E A C Value ) X 100%
With reference to Figure 2.5.3, one can conclude that the wigwam catastrophe has a highest
accuracy while the cusp has the least accuracy when compare with values obtained by the
E E A C method.
Although the butterfly and the wigwam catastrophes give a better accuracy,
their values are greater than that of the E E A C solution.
wigwam is used for stability assessment.
This is unsafe if the butterfly or the
However, if a bias value is added to the butterfly or
the wigwam catastrophe for safety margin, these envelopes may provide better accuracy for
stability assessment.
2.5.2Seven-machine CIGRE System
a.
The procedure is repeated for the seven-machine CIGRE system to determine the
maximum allowable mechanical power input change of the system. The cusp catastrophe
is applied to different critical machine combinations to determine the proper critical
machine group.
Minimum change in mechanical power input of the system is used as
selection criterion.
It is found that Machine 7 is the sole critical machine group.
The
wigwam, butterfly, swallowtail and cusp catastrophes are then applied to this particular
critical group for detailed study.
Table 2.5.4 summarizes the test results.
(See
Appendix D) .
CRITICAL M A C H I N E
7
E E A C Solution ( A P )
2.80473 p.u.
m
CATASTROPHE
MODELS
AP
Cusp
2.57149 p.u.
Swallowtail
2.62972213 p.u.
6.240%
Butterfly
2.84079 p.u.
-1.286%.
Wigwam
2.82713 p.u.
-0.799%
% Error
m
.8,316%
Table: 2.5.4: Seven-Machine CIGRE System-Critical Mechanical Power Input change
(Steady-State Stability) Determined by (a) Different Catastrophe Models
(b) The E E A C Method
Note: %Error = [(EEAC Value - Catastrophe Value)
31
E E A C Value ) X 100%
2.6 Conclusions
1.
Catastrophe theory has been shown in the thesis to define a steady-state stability
region of multimachine power systems subjected to mechanical power input change.
2.
Different catastrophe models can be applied in power systems to determine the critical
mechanical power input change before system instability occur.
Results show good
agreement with that obtained from EEAC method.
3.
Using EEAC method as bench mark of comparison, the thesis also concluded that
higher order catastrophe such as the wigwam and the butterfly show better accuracy.
However, without overshooting the stability value,
the swallowtail catastrophe
proved to be adequate for stability assessment, and the cusp catastrophe provides a
clear envelope in visualizing power system stability region.
32
CHAPTER T H R E E
APPLICATION OF CATASTROPHE T H E O R Y M O D E L T O TRANSIENT STABILITY
ANALYSIS OF MULTIMACHINE POWER SYSTEM
3.1 Introduction
Catastrophe theory model for steady-state analysis of multimachine power systems with
variation of mechanical power input has been described in Chapter Two.
In this chapter,
catastrophe models of interconnected multimachine power system is proposed for the study
of transient stability with balance three-phase faults at different power system locations.
Wvong, Mihiring and Parsi-Feraidoonian [14,15,16] proposed to use the swallowtail
catastrophe to study transient stability of power systems, but research did not identify the
critical clearing angles.
The cusp catastrophe will be developed in this chapter to
determine the transient stability of power systems byfindingthe critical clearing angle.
In Section 3.2, catastrophe theory models for transient stability analysis of multimachine
power systems for balanced three-phase faults will be developed.
In Section 3.3 , the
cusp catastrophe will be applied to the three-machine WSCC and seven-machine CIGRE
systems.
Exhaustive simulation were made assuming various machines to be critical in
single-machine, two-machine, etc. because no definitive method exists for determining
criticality [1].
Test results and observation will be discussed in Section 3.4 ( typical
simulation result is presented in Appendix E and F).
Section 3.5.
33
Conclusions will be stated in
3.2 Catastrophe Theory Model for Three Phase Fault
A n g L i n R i d . n .
Figure 3.2.1: Multimachine Power System with BalancedThree-Phase Fault (OMTB)
During the transient period, an exchange of energy takes place between the rotor of a
critical machine (or a group of critical machine group) and the post-fault power system
network.
The kinetic energy generated by the accelerating power during the fault-on
period must be fully absorbed by the post-fault network in order to maintain stability.
The
kinetic energy and the potential energy which can be absorbed by the post fault network
can be well described by Figure 3.2.1
With reference to Figure 3.2.1, and using the extended equal-area stability priterion, of
Equation (2.13), we have:
S [Pm""- P
Y °
k
flt
c
-T
flt
k
s i n ( Y + c O ] d ¥ + S [P
^
k
k
c
k
34
pre
m
-Pc -T
pos
pos
k
sin(Y +a
k
pos
k
)] d ¥ = 0 (3.1)
k
For the limiting case of the system to be stable, i.e.
(PnT - P ) ( T - T ° ) + T cos ( T + <x ) - T cos(T ° + a )
+ O V " - P c H (Tk" - T ) + IV cosCF + a ) - IV cos(T + aiT) = 0 (3.2)
flt
c
c
.
flt
k
k
c
k
flt
k
c
flt
k
03
u
k
pos
k
flt
k
k
k
08
k
c
k
By substitution of W = Tk + A T , and with some algebraic manipulation, Equation (3.2)
c
k
may be put in the form of:
Ki A T + K cos( A T ) + K sin( A Y ) + K4 .= 0
k
2
k
3
(3.3)
k
where
pro
p
W
=
sin
;
1
Tkprc
pre
:
a
=P
K
2
=T
K
3
= - Tk" sin(T + c O
pre
pos
k
(3.5)
08
cos(T
+a
c
k
03
K4
(3.4)
pre
k
- •'
Ki
m
-Pc"
p
pos
k
)
(3.6)
(3.7)
c
k
=(P
pre
m
+ T
-Pe )(T -HV)
m
c
k
flt
k
cos ( T
c
k
+ a ) -T
flt
k
flt
k
cos(T ° +a ) - T V cos(T + c O
flt
k
k
05
c
k
(3.8)
and the superscript
pre
=
pre-fault value
(39)
fit
=
during fault value
(3.10)
pos
=
post fault value
(3.11)
Note that parameters K , K , and K 4 varies, and Ki remains constant, with clearing angle,
2
3
Tk .
c
35
3.2.1Series Expansion of sin(A Fk) and cosfATk)
,
A Y k is unknown in Equation (3.3) and would normally require an iterative approach to
solve.
The iterative approach can be avoided by use of catastrophe theory after series
expansion of s i ^ A ^ k ) and cos(AYk) to get:
A*F
K,AT +K
k
AHV A ¥
k
A¥
6
k
+K
2
2!
.
AT
3
+
k
6!
4!
A¥
3
k
3!
5
k
+.
+ BC, = 0
(3.12)
5!
Let
AT
:
k
y + fi>
(3.13)
so that
(A^k)
2
= (y + ii)
(AY,)
3
= (y + fi)
(A*F )
k
4
2
3
= (y +
Ii)
4
(A¥ )
5
= (y + fi)
(A¥ )
6
= (y + fi)
k
k
5
6
= y +2fly+fl
2
(3.14)
2
= y +3fiy +3fl y+fj
3
2
2
3
(3.15)
•= y +4i5y +6fl y +4fi y+fi
4
3
2
2
3
= y +5fiy +10B y +l
5
4
2
3
(3.16)
4
OBy+SIiV+fi
5
Q.IT)
= y +6fiy +l 5fi y +20I5 y +l 5 B y + 6 f i y + B
6
5
2
4
3
3
5
6
(3.18)
By selecting as many terms of ( A Y k ) in Equation (3.12) as needed and choosing p such
that the coefficient of the appropriate term in the catastrophe manifold equation becomes
zero, different catastrophe models may be derived.
36
3.2.2Wigwam Catastrophe
Selecting terms of A T k to the sixth degree and normalizing A T
6
k
, Equation (3.12) may
be put in the following form:
K3
K3
A»Pk -6
A ^ k -30ATk +120
6
5
K i + K3
AT
4
3
k
+360A*F -720
k
K-2
K2
K2+K4
A f -720 r-
2
"='0 (3.19)
k
K.2
K.2
Substitute A T k = y + p\ expand (y+P) where n = 1, 2,..,6, and make the coefficient of y
n
5
zero so that:
K
3
K
2
- = 0,
6 0-6
K
3
K
2
or
.
,
• (3.20)
(3.21)
Hence, we get the wigwam manifold equation
y + ty + uy + vy + wy + x = 0
6
4
3
(3.22)
2
and it may be shown that
t
=
-15 (2+p )
(3.23)
u
=
- 40 p
(3.24)
v
=
45(8 + 4 p - p )
w
=
24p ( 10 - p ) - 720
2
3
2
,
4
(3.25)
K,
3
(3.26)
2
K
2
K + K,P
—-)•
K
4
x
=
-5P (72-18p
2
2
+ p )-720( 1+
4
(3.27)
2
Note that P is a function of K and K ; K , K ,and K 4 are functions of clearing angle ( T ) ;
c
2
3
2
3
k
Therefore, the wigwam control parameters t, u, v, w, and x varies with T .
c
k
37
3.2.3Butterfly Catastrophe
Selecting terms of A^Fk to the fifth degree and normalizing A ^ k , Equation (3.12) may
5
be put in the following form:
K2
K.2
AT
5
k
+5
A T^-20 A 4^-60
A ¥^+120
K
K3
Substitute A ¥
K2+K4
K.1+K3
A¥ +120
— =0
k
K
3
3
(3.28)
K3
= y + p\ expand (y+P) where n = 1, 2,..,5, and make the coefficient of y
n
k
zero so that:
K
2
P
(3.29)
K
3
Hence, we get the butterfly manifold equation
y + uy + vy +wy + x = 0
5
3
(3.30)
2
where
u
=
- 10(2 + p )
(3.31)
-20P
(3.32)
2
3
v
K,
w
=
15p (4-p )+120(1+^—)
K ;
2
(3.33)
2
3
K4+K1P
x
=
4P ( 1 0 - p ) + 120
3
(3.34)
2
K
•
3
Note that P is a function of K and K ; K , K ,and K 4 are functions of clearing angle (^k ).
0
2
3
2
3
Therefore, the butterfly control parameters u, v, w, and x varies with %
38
4
3.2.4SwalIowtaiICatastrophe
Selecting terms of A T to the fourth degree and normalizing A Tk , Equation (3.12) may
4
k
be put in the following form:
K
-4— A T
K1+K3
3
AT
4
k
K
Substitute A T
k
+ 24 ——
2
k
K
2
=y+
k
- 12AT
3
K +K4
•
2
-AT
k
+ 24
K
2
=0
(3.35)
2
P, expand (y+P) where n = 1, 2,..,4, and make the coefficient
n
of y
zero so that:
K
p
3
=
(3.36)
K
2
Hence we get the swallowtail manifold equation
y + vy + wy + x = 0
4
(3.37)
2
where
v
=
-6(2+p )
(3.38)
w
=
- 8p + 24 K, / K
x
=
3p ( 4 - p ) + 24( 1 +—•
K
2
(3.39)
2
2
K4 + K,p
2
)
2
.
(3.40)
2
Note that P is a function of K and K ; K , K ,and K 4 are functions of clearing angle (Tk ).
C
2
3
2
3
Therefore, the swallowtail control parameters v, w, and x varies with Tk .
c
39
3
3.2.5Cusp Catastrophe
Selecting terms of A T
to the third degree and normalizing A T k , Equation (3.12) may
3
k
be put in the following form:
K1+K3
K.2
ATk + 3
ATk -6
3
K
K3
Substitute A T k = y +
K2+K4
A T
2
k
- 6 — —
K
3
=0
(3.41)
3
P, expand (y+P) where n = 1, 2,.3, and make the coefficient
n
of y
zero, we find P as follows:
K
p
2
=
(3.42)
K
3
Hence we get the cusp manifold equation
y +wy + x = 0
(3.43)
3
where
w
=
-3p + 6 ( l + - — )
K3
x
=
2p -6
(3.44)
2
K4+K1P
(3.45)
3
K
3
Note that P is a function of K and K ; K , K ,and K 4 are functions of clearing angle (Tk°).
2
3
2
3
Therefore, the cusp control parameters w and x varies with Tk .
C
In order to visualize
transient.stability in two dimensional study, only the cusp catastrophe will be applied in the
two test systems.
The wigwam, butterfly and swallowtail catastrophes will not be used
since they require more than two dimensional data.
40
2
3.2.6Fold Catastrophe
Selecting terms of A * F to the second degree and normalizing A^k,
k
Equation (3.12)
may be put in the following form:
K1+K3
A^Fk -2•
K.2+K4
A4V2-
2
K2
=0
(3.46)
K2
Substitute A ^ k = y +
P, expand (y+P) where n = 1, 2, and make the coefficient of y zero
n
sot that:
K,+K
3
p
=
(3.47)
K
2
Hence we get the fold manifold equation
y +x=0
(3.48)
2
where
x
:
- p - 2( 1 + - — )
(3.49)
2
K
2
Note : The fold catastrophe will not be used on the test systems because x is the only
control parameter of this catastrophe and would require plotting of x control parameter and
the state variable y.
•
41
3.2.7Extended Equal Area Criterion (EEAC) Method
The E E A C method will be used as the reference method to determine the accuracy of the
cusp catastrophe simulation result.
Refer to Figure 3.2.1, power systems will remain
stable if area 1 is less thanor equal to area 2.
Critical clearing angle of the system can be
determined when area 1 is equal to area 2.
Mathematically, area 1 and 2 can be evaluated as follows:
Areal
= S[P„r - P
Area 2
= - $ [PnT + Pc" - T ^ sin(^ +a )]dT
flt
c
-T
flt
k
sin^+a^d^
(3.50)
4V
05
8
k
k
k
(3.51)
Refer to Section 3.2 for symbol
T ^ c o s W +
k
+T
flt
k
cO-Tk^ro^
cos(4V + a
VT^^
f l
k
(3.52)
From energy standpoint, area 1 can be described as kinetic energy generated by the
accelerating power during the fault on period and area 2 can be described as the required
potential energy which can be absorbed by post fault power systems.
When the post fault
potential energy of the system is larger than the kinetic energy generated during fault, the
system must be stable.
3.2.8Summary of Catastrophe Models
Different catastrophe models and control parameters for transient stability analysis are
summarized in Table 3.3.1
42
CO.
c a
/ \
CQ.
o
+
/-
N
+V
o
CN
CN
ca
+
ca
oo
ca
•
o
CN
ca
+
CN
+
ca
CN
u
<u
ca
CO
E
CQ.
C3
J-
e
s
P
k
o
-M
H
©
CN
. o
r-
CN
+
CQ.
CO.
"*
e
U
•o
a
+
4
ca
oo
+
es
TS
ca
CO
CN
a
es
H
cn
O
ca
+
ca
o
CN
ca
+
•a
o
CN
00
a
o
u
cn
ca
o
es
ca
+
e
s
CN
u
Q
.
es
(Z)
c
cu
es
u
ca
*4
i4
Ui
+
H
CN
ro
UJ
Q
+
O.
+•
es
o
H •
+
w
en
O
.If
+
+
+
+
H
H
>
+
+ .
x
+
s
o
•v.
•a
ti
C
s
ea
o
CO
U
3.3 Simulation Result
Catastrophe models as described in Section. 3,2 were developed for transient stability
analysis of a multimachine power system.
The stability boundary of different catastrophe
manifold described in the previous section are dependent upon the parameters K i , K , K ,
2
3
K 4 and only K i is independent of the change in the clearing angle , 4 V . Therefore, for the
sake of clarity,
only the cusp catastrophe model is used to study the three-machine
W S C C and seven-machine CIGRE system.
Configurations of these test systems were
shown in Figure 2.5.1, Figure 2.5.2 , and system data were listed in Table 2.5.1 , and Table
2.5.2.
Note that critical clearing angles of the system obtained by the cusp catastrophe
will be compared with that obtained from the E E A C method.
Refer to Section 2.4.7 for
the E E A C method.
3.3.1.Three-Machine WSCC System
Different combinations of machine(s) are grouped together to form the critical group and
non-critical group.
These combinations are applied for the cusp catastrophe model and a
typical test result are summarized in Appendix E .
Clearing angle, 4 V , is the implicit state
variable for this manifold and following are the observations:
1.
The cusp catastrophe bifurcation set defines an envelope for the stability region. A
typical stability envelope is shown in Figure 3.3.1.
44
x Parameter
Figure 3.3.1: The Cusp Bifurcation Set for Transient Stability
(Plot of w vs. x Parameters)
Comparison of Simulation Result with the E E A C solution
Fault Line
Node Open
5
4-5
5
4-5
5
4-5
5
5-7
5
5-7
5
5-7
6
6-9
6
6-9
6
6-9
6
4-6
6
4-6
6
4-6
8
7-8
' 8
7-8
8
7-8
8
8-9
8
8-9
8 . 8-9
Critical
Machine
2
3
2&3
2
3
2&3
2
3
2&3
2
3
2&3
2
3
2&3
2
3
2&3
EEAC solution
(Chg. In Clearing Angle)
2.0184
Stable
1.6260
1.8448
Stable
1.1513
Stable
Stable
1.3494
Stable
Stable
1.6706
1.1212
2.2542
1.4955
1.3480
.2.1667
1.5258
Cusp Catastrophe
Percentage
(Chg. In Clearing Angle)
Error
2.0149
0.1737%
Stable
Stable
1.6069
1.1886%
1.8411
0.2010%
Stable
Stable
1.1428
0.7438%
Stable
Stable
Stable
Stable
1.3372
0.9124%
Stable
Stable
Stable
Stable
1.6568
0.8329%
1.1121
0.8183%
2.2510
0.1422%
1.4783
1.1635%
1.3304
1.3229%
2.1638
0.1340%
1.5084
1.1535%
Note: Stable means never unstable
Table 3.3.1: Three-Machine WSCC System - Critical Clearing Angle .
(Transient Stability) Determined by (a) The Cusp Catastrophe
(b) The E E A C Method
45
3.
A typical cusp bifurcation envelope is drawn in Figure 3.3.1 to define a post fault
transient stability region of the system.
The locus of catastrophe control variables (x
and w) change as increment of clearing angle
- 4V).
The system becomes
unstable when the locus crosses the cusp envelope.
Critical clearing angle obtained
from the cusp result is compared with that of E E A C method and results are
summarized in Table 3.3.1
In general, critical clearing angle obtained from the cusp
catastrophe is smaller than that of E E A C method and the percentage error is in the
order of one (1) percentage.
4.
If the critical group of power systems can be identified successfully, the cusp
catastrophe can be used successfully to determine the post fault stability in term of
critical clearing angle.
Note that the cusp catastrophe provide a graphical tool for
operator to determine post fault instability may occur.
From engineering standpoint,
the cusp catastrophe can even provide a better safety margin that that of E E A C
method.
3.4.2Seven-Machine CIGRE System
1.
The cusp catastrophe is then applied to the seven-machine CIGRE system to
determine the maximum allowable clearing angle for balanced three-phase faults at
different buses.
Simulation results are compared with that obtained from E E A C
method and results are summarized in Table 3.3.2.
Fault Line
Node Open
9
9
9
9
9
9
9
9
9
9
9
Critical
Machine
9-10
,9-10
9-10
9-10
9-10
9-10
1
2
3
4
5 '
6
9-10
7
9-11
9-11
9-11
9-11
1
E E A C solution
Cusp Catastrophe
Percentage
Chg. In Clearing Angle (Chg. In Clearing Angle)
Error
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
1.638007
1.609833
1.7501%
Stable
Stable
2
3
4
Stable
Stable
46
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
9
9-11
9
9
9-11
9-11
10
9-10
10
10
9-10
5
6
Stable
Stable
Stable
7
. Stable
1.922813
Stable
1.902927
Stable
1.0450%
1
Stable
Stable
Stable
9-10
2
3
Stable
Stable
Stable
Stable
10
9-10
. 4
Stable
Stable
Stable
Stable
Stable
10
10
10
9-10
5
9-10
9-10
6
7
Stable
2.283991
Stable
Stable
2.270053
Stable
Stable
.0.6140%
Stable
10
10
10
10-13
10-13
10-13
10-13
10-13
10-13
10-13
1
2
3
Stable
Stable
Stable
4
5
6
Stable
Stable
1.955282
Stable
Stable
Stable
Stable
Stable
1.927501
Stable
Stable
Stable
Stable
Stable
1.4413%
7
Stable
Stable
Stable
Stable
Stable
2.093896
Stable
Stable
2.077922
Stable
Stable
0.7687%
11-12
11-12
11-12
1
2
3
4
5
6
7
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
12
12
12-16
12-16
1
2
12-16
3
Stable
Stable
2.007387
Stable
Stable
12
Stable
Stable
2.025550
0.9048%
12
12
12-16
12-16
4
5
Stable
Stable
Stable
Stable
Stable
12
12-16
Stable
12
12-16
6
7
Stable
Stable
Stable
Stable
Stable
12
12
12
12-17
12-17
12-17
12-17
12-17
12-17
1
2
3
4
5
Stable
Stable
2.081358
Stable
Stable
Stable
2.064949
Stable
.0.7946%
Stable
Stable
Stable
Stable
Stable
Stable
10
10
10
10
12
12
12
12
12
12
12
12
' 12
12
12
13
11-12
11-12
11-12
11-12
Stable
Stable
Stable
.
.
Stable
Stable
Stable
12-17
10-13
6
7
1
13
13
13
10-13
10-13
10-13
2
3
4
Stable
2.396633
Stable
2.387382 .
Stable
Stable
0.3875%
13
10-13
5
2.328945
2.323067
0.2530%
Stable
Stable
Stable
47
Stable
Stable
Stable
Stable
Stable
13
13
10-13
6
7
13
10-13
10-13
13
11-13
13
13
13
13
13
13
13
13
13
11-13
11-13
11-13
13
13
13
12-13
12-13
12-13
12-13
12-13
12-13
13-16
13-16
13-16
13-16
13-16
13-16
Stable
Stable
2.299119
Stable
Stable
2.284525
Stable
Stable
Stable
2.414661
2.348639
Stable
Stable
2.352596
Stable
Stable
Stable
2.406559
2.343071
Stable
Stable
2.341330
Stable
Stable
Stable
Stable
3
4
5
Stable
2.411632
2.342330
Stable
2.403241
2.336671
Stable
Stable
2.344713
Stable
Stable
Stable
2.402353
2.331417
Stable
Stable
2.332718
Stable
Stable
Stable
2.393656
2.325673
Stable
Stable
0.5142%
Stable
13-16
13-16
6
7
4&5
1
2
3
4
5
6
7
4&5
Stable
Stable
2.318102
Stable
Stable
0.5542%
16
16
12-16
12-16
1
2
1.931665
Stable
1.911999
1.0286%
Stable
Stable
16
12-16
12-16
3
Stable
16
4
Stable
Stable
Stable
Stable
Stable
16
12-16
5
Stable
Stable
Stable
16
16
12-16
6
7
Stable
Stable
Stable
Stable
1.901050
Stable
1.880496
Stable
1.0930%
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
13
13
13
13
13
13
13
13
13
13
13
16
16
16
16
16
16
16
17.
17
1.1-13
11-13
11-13
11-13
12-13
12-13
12-16
13-16
4& 5
1
2
3
4
5 .
6
7
4&5
1
2
13-16
13-16
1
2
3
13-16
13-16
13-16
13-16
4
5
6
7
12-17
1
2
12-17
Stable
2.330948
-
48
Stable
Stable
Stable
Stable
Stable
Stable
2.148111
Stable
2.121857
Stable
Stable
0.6388%
Stable
Stable
Stable
0.3367%
0.2376%
Stable
Stable
0.4812%
Stable
Stable
Stable
0.3492%
0.2422%
Stable
Stable
Stable
0.3633%
0.2470%
Stable
Stable
Stable
Stable
Stable
Stable
1.2373%
17
17.
17
12-17
.3
4
5
Stable
1.2-17
6
7
17
15-17
1
17
17
15-17
15-17
2
3
17
17
15-17
15-17
4
5
17
17
15-17
15-17
6
7
17
17
12-17
12-17
12-17
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
2.243431
Stable
2.216019
Stable
1.2370%
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Stable
Note: Stable means never unstable
Table 3.3.2: Three-Machine WSCC System - Critical Clearing Angle
(Transient Stability) Determined by (a) The Cusp Catastrophe
(b) The E E A C Method
3.4. Conclusions
1.
Catastrophe theory can be used to define the transient stability region of a
multimachine power system provided that proper combination of critical machine(s)
can be identified.
Further research is required to identify critical machine(s) in order
for the E E A C and catastrophe model to applied successfully.
2.
As observed from the simulation result, the cusp manifold of transient catastrophe
model shows a close agreement with the extended equal area critical in identifying (1)
the stability region, and (2) critical clearing angle.
Once the critical angle can
identified, clearing time can be calculated as stated in [1].
3.
Since K , K ,and K 4 of the catastrophe energy equation developed in this paper are
2
3
dependent on the system clearing angle.
catastrophe in a two-dimensional study.
This restricts our research to the cusp
Although the application of catastrophe is
only.applied in the cusp catastrophe, it shows a very good agreement with result
obtained from E E A C method.
Hence, the cusp catastrophe can provide a alternative
means to visualize transient stability of power systems.
49
Further research can be done in this area to explore whether some alternative
formulation of catastrophe envelope can be found to provide two dimensional study
for the wigwam, butterfly, swallowtail catastrophes.
50
CHAPTER 4
CONCLUSIONS
In this thesis, the energy function was efficiently used with catastrophe theory to define
comprehensive steady-state and transient stability regions for power systems.
Explicit
boundaries of the stability regions were identified by the bifurcation set of catastrophe
manifolds.
For steady-state stability application, different catastrophe models were
successfully used to define system stability regions and to determine the critical mechanical
power inputs of the system before instability occur.
For three-phase fault application, the
cusp catastrophe was developed not only to find transient stability boundaries but also to
determine critical clearing angle of power systems.
Critical mechanical input power of the
steady-state study and critical clearing angle of the transient stability study were also found by
the E E A C method (refer to Section 2.47, and Section 3.2.7
for details).
Results obtained
from E E A C were used to compared with to that obtained from catastrophe results.
catastrophe result shows good agreement with the E E A C method.
The
The catastrophe method
is made practical if the concept of critical machines for a specified fault can be identified
successfully.
,
This thesis investigated the application of catastrophe theory to stability problem of
multimachine power systems.
The first half of the thesis studied the application of
catastrophe theory to power system subjected to variation of mechanical power input.
By
suitable selection of Taylor series expansion of balanced energy equation, different orders of
catastrophe manifold such as the cusp, swallowtail, butterfly, and wigwam can be developed
to study the steady-state stability regions.
The study shows that catastrophe theory can be
successfully used to define the stability region and to determine maximum mechanical power
input of power systems before system instability occur.. Higher order catastrophes, in
general, show better accuracy than that of lower order.
The swallowtail catastrophe,
however, provide adequate result without overshooting the stability boundary.
In the second half of the thesis, the cusp catastrophe was applied to study transient stability
for symmetrical three phase fault.
Because the values of catastrophe parameters K , K , and
2
51.
3
K 4 are dependent upon system clearing angle, only
study.
the cusp catastrophe was used in the
Transient stability limits can be successfully described by the bifurcation set of the
cusp catastrophe.
Critical clearing angle can be found at the intersection between the
clearing angle locus and cusp catastrophe's bifurcation envelope.
The result is in good
agreement (in the order of one percent) with those obtained by the E E A C method..
The major contributions and conclusions of this research are the followings:
1.
For the first time, different orders of catastrophe manifold are applied to the transient,
stability problem.
The cusp, swallowtail, butterfly, and wigwam catastrophe can be
used to define transient stability regions (power systems with mechanical input as loading
disturbance).
2.
The thesis concluded that higher order catastrophes have better accuracy than the lower
order catastrophe (steady-state application).
may give results above the actual limits.
However, the higher order catastrophe
Overshooting depends on the formulation of
Taylor series expansion of balanced energy equation.
The swallowtail catastrophe
developed in this thesis for the steady-state study proved to have the best accuracy
without overshooting the actual value.
From engineering standpoint, The swallowtail
catastrophe would be the best choice for steady-state stability study.
3.
A new energy balance equation was developed in this thesis to study transient stability of
systems with balanced three-phase faults. Since all catastrophe control parameters varies
as clearing angle of the system, only the cusp catastrophe is practical for transient
stability analysis of power systems in two dimensional graphics. The thesis concluded
that the cusp catastrophe can be used to define comprehensive transient stability regions
and find critical clearing angle of the system with good accuracy.
The result is
important to ensure power system security for any disturbance considered.
Hence,
enable power system planners to design proper stability controls to prevent system
instability.
52
Therefore, catastrophe models can be used for fast on-line and off-line stability assessment of
power systems.
1.
However, more research is needed in the following:
Critical machine(s) identification is the key factor of this thesis catastrophe model.
[3]
has suggested a way to identify the critical machine(s) in multimachine power system but
does not appear to be definitive.
2.
The thesis only used clearing angle as stability criteria for power system study. Clearing
time is essential for operators to determine when to open a breaker for system instability.
A method has been suggested in [3] to convert clearing angle to clearing time but is not
definitive.
3.
This research considered only single disturbances and balanced three-phase faults.
Multiple disturbances and single-phase faults should also be considered in future
research.
53
REFERENCES
1.
M . Ribbens-Pavella and F.J. Evans, " Direct methods for studying dynamics of large scale
electric power systems - a survey", Automatica, 21, 1-21, Jan. 1985.
2.
A.A. Fouad and S.E. Stanton, "Transient stability of multimachine power systems", IEEE
Transactions on Power Apparatus and Systems, PAS-100, 3408-3424, August 1981.
3.
M . Ribbens-Pavella, Th. Van Cutsem, R. Dhifaoui and B, Toumi, "Energy type Lyapunovlike direct criteria for rapid transient stability analysis", Proc. O f International Symposium
on Power System Stability, Ames, Iowa, May 1985, 135-146.
4.
S. Tamashira, T. Koike and A. El-Albiad, "Fast transient security assessment and
enhancement using pattern recognition", Proc. Of 8 PSCC, August 1984.
th
5.
T. Poston and I. Stewart, "Catastrophe Theory and Its Applications", Pitman Publishing
Co., London, 1979.
6.
A . A . Sallam and J.L. Dineley, "Catastrophe Theory as a Tool for Determining
Synchronous Power System Dynamic Stability", LEEE Trans. PAS, vol. 102, pp. 622-630,
March 1983.
7.
Deng Jixiang and Zhang Changjian, "Steady-State Stability Assessment of Multimachine
Power Systems Using Catastrophe Theory" LEEE Tencon '93, Beijing.
8.
R. Thorn, "Structural Stability and Morphogenesis", Benjamin-Addison Wesley, New
York, 1975.
9.
I. Stewart, "Elementary Catastrophe Theory", LEEE Trans. On Circuits and Systems, Vol
CAS-30, pp. 578-586, August 1983.
10. P.T. Saunders, "An Introduction to Catastrophe Theory", Cambridge University press,
1980.
11. P.M. Anderson and A. A. Fouad, "Power System Control and Stability", Vol.1, The Iowa
State University Press, 1977.
54
12. M . A . Pai, "Power System Stability", North-Holland systems and control series vol. 3,
North-Holland Publishing Company.
13. Duncan Glover and Mulukutla Sarma, "Power System Analysis and Design", PWS
Publishing Company, Boston, 1994.
14. M . D . Wvong and A . M . Mihirig, " Application of Catastrophe Theory to Transient Stability
Analysis of Power Systems", Proceedings of IAS T E D International Conference on High
. - Technology in the Power Industry, Bosman, Montana, August 1986.
15. M . D . Wvong and A . M . Mihirig, "Transient Stability Analysis of Multimachine Power
Systems by Catastrophe Theory", Paper submitted for publication to IEE proceeding C.
16. T. Poston and I. Stewart, " Catastrophe Theory and Its Applications", Pitman Publishing
Co., London, 1979.
17. A:A. Sallam and J.L. Dineley, "Catastrophe theory as a tool for determining synchronous
Power System Dynamic Stability", IEEE Trans. PAS, Vol. 102, pp. 622-630, March 1983.
18. M . D . Wvong, Xiang-lin Sun and R. Parsi-Feraidoonian, "Catastrophe Theory Model of
Multimachine Power Systems For Transient Stability Studies", IEEE Tencon '93, Beijing.
55
APPENDIX A
DERIVATION OF ONE-MACHINE INFINITE BUS DYNAMIC EQUIVALENTS
OF MULTrMACHINE SYSTEM
A l . Derivation of Dynamic Equivalents
Equation (2.13) can derived by multiplying Equation (2.16) by M , i.e
MY* =
M5 -M5
k
Mo
(A.1)
0
..
Mk 5
M
k
Mo 8
k
Mo+Mk
0
Mo+Mk
Mo
k
k n
E Pm " E [ E E; Ej (gy cos Sij + by sin 8y) ]
i=l
r1 j 1
;
Mo+Mk
M
k
E Pm - E [' E E; Ej (gy cos 6g + by sin 8y) ]
i=k+l
i=k+lj=l
;
Mo+Mk
MoEPmi-MkEPmi
i=l
i=k+l
.Mo+Mk
Mo
Mo+Mk
M
| k n
E [ E E; Ej (gy cos Sy + by sin 6y)]
1
i = 1 j = 1
k
+.
Mo+Mk
E [ E E; Ej (gy cos Sij + by sin 5y)]
=k+l j=l
56
Mo
P
n
i E [(E + E ) E; Ej (
i=l j=l j=k+l
m
Mo+Mk
M
k
I k
I
k
•+
„
k
cos 5y + by sin 8y)]
g i j
cos 8ij + by sin 8y) ]
n
\ E [(E + E ) Ei Ej (
i=k+l j=l j=k+l
Mo+Mk
g i j
rk
n
—< E [ E Ei Ej (gij cos 6ij + by sin.By)]
i=1 j = k + 1
Mo+Mk
Mo
P - Pc
m
L
M
j
k
n
k
+>
—< E [ E E; Ej (gy cos 5y + by sin 8y)]
i=k+l j=l
Mo+Mk
M„
k n
E [ E E; Ej (gy cos 5y + by sin 8y)] |
i=l j=k+l
P -P
Mo+Mk
M
I
k
+
Mo+Mk
Mo
P -P
m c
n
k n
E [ E Ei Ej ( gy COS( gy-Tk+Tk ) + by sin( 6y-T +T ))]
i=l j=k+l '
k
A
Mo+Mk
A
M
+
k
^ ,E [ E E; Ej (gy cos 5y - by sin 6y)]
li=l j=k+l
k
—
-<
Mo+M
k
k
k n
E [ E E; Ej (gy cos(8y-T +T ) - by sin( 8y - T + T ) ) ]
i=l j=k+l
k
k
k
k
p -p
A
m -- c
1
Mo
Mo+Mk
M
k
+
Mo+Mk
k
Ei Ej gy [cos(8ij - Tk) cosTk - sin(8y-T ) sinT ]
n
k
k
E E i
i=l j=k+l + Ei Ej by [sin(8y - T ) cosT + cos(8y - T ) sinT ]
k
k
k
k
k
Ej Ej gy [cos(8y - T ) cosT - sin(8y - T ) sinT ]
n
k
E E
i=l j=k+l
k
k
k
- Ei Ej by [sin(8y - T ) cosT + cos(8y - T ) sinT ]
k
57
k
k
k
Pm-P
c
Mo Ej Ej [gy cos(8ij-Y ) + ,bij sinCSij-^k) ]
k
>
COS^k
-Mk E; Ej [gy cos(8ij-¥k) - by sinCSy-^fc) ]
+
_J
Mo Ei Ej [-gy sinCSij-^k) + by cos(5y-¥k) ]
k „
sin^k
Mo+M
i=1
k
J=? i ^
+
- M Ei Ej [-gy sinCSy-^k) - by cos^y-^) ]
k
P -P
E E E; Ej [ .11 gy cosCSy-Yk) + by sin(8 - P ) ] COS T
i=lj=k+l
,
s
k
k
k
n
+ E E E; Ej [ by cos(8y-T ) - u gij sinCSy-^k) ] sin W
i=lj=k+l
k
P
m
k
- P - [ T sin ak cos *P + T cos a sin Y ]
c
k
k
Pm-Pc-[T sinCPk + a ) ]
k
k
58
k
k
k
APPENDIX B
CATASTROPHE CONTROL PARAMETER DERIVATION
(STEADY-STATE STABILITY ANALYSIS^
BI. Detailed Calculation of Wigwam Catastrophe Control Parameters
a.
Parameter t ( coefficient of y )
4
= 15 p + 7 ( K / K ) ( 5 p ) - 4 2
2
2
3
= 1 5 p + (-6P)(5p)-42
2
= - 42 - 15 p
b.
2
Parameter u (coefficient of y )
3
= 20 p + 7 (K / K ) (10p ) - 42 (4P)-210(K / K )
3
2
2
3
2
3
. = 20 P + (-63) (10P ) - 168P - 30(-6P)
3
2
= 20p -60p -168p+180p
3
3
= -40p +12p
3
= 4p(3-10p )
2
c.
Parameter v (coefficient of y )
2
= 15 p + 7 (K / K ) (10p ) - 42 (6p ) -210(K / K ) (3p) + 840
4
3
2
2
3
2
3
= 15 P + (-6p)(10p ) - 42 (6P ) - 30(-6p) (3p) + 840
4
3
2
= -45 P - 252 P + 540 p +840
4
2
2
= -45 p + 288 p +840
4
2
= 840 + p (288 -45p )
2
2
59
Parameter w ( coefficient of y )
= 6 p + 7 (K / K ) (5p ) - 42 (4p ) -210(K / K ) (3p ) + 840(2P) +2520(K / K )
5
4
2
3
2
3
2
3
2
3
= 6 p + (-6p)(5p ) - 42 (4P ) - 30(-6p) (3p ) + 840(2p) + 360 (-6P)
5
4
3
2
--24p - 168p + 540p + 1680P - 2160P
5
3
3
=-24P + 372p - 480p
5
3
= -12P(40-31p + 2p )
2
4
Parameter x (constant term)
= P +7(X /K )(p )-42(P )-210(X^
6
5
2
4
3
= p + (-6p)(p ) - 42(p ) - 30(-6p)(p ) + 840(P) + 360 (-6p)P - 5040(K,+K )/K
6
5
4
2
3
3
= -5p - 42(p ) + 180p + 840(p ) - 2160p - 5040(K +K )/K
6
4
4
2
2
1
= -5p + 138P - 1320p - 5040(Ki+K )/K
6
4
2
3
3
=-p (1320 - 138P + 5p ) - 5040(K +K )/K
2
2
4
1
3
3
P = 6 K / 5 K ( B y setting coefficient of y to zero)
5
3
2
60
3
3
3
APPENDIX C
THREE-MACHINE WSCC TEST
SYSTEM
CATASTROPHE MODELS SIMULATION
(STEADY-STATE STABILITY
RESULTS
ANALYSIS^
(CRITICAL M A C H I N E =
2)
C A S E 00:
SYSTEM DATA AND RESULT
C A S E CI:
CUSP
C A S E C2:
SWALLOWTAIL
C A S E C3:
BUTTERFLY CATASTROPHE
C A S E C4:
WIGWAM
SUMMARY
CATASTROPHE
61
CATASTROPHE
CATASTROPHE
C A S E 00: WSCC System'Data and Result Summary
NofCm
Cm
Mk
Mo
Pm°
PC
Tk
Alpha
Delk
Delo
Table 00: WSCC System Data of One Machine Infinite Bus (3 Machines, 9 Buses)
1
1
1
2
2
1
2
3
1 &2
1&3
0.1254
0.034
0.016
0.1594
0.1414
0.0499
0.1414
0.1594
0.016
0.034
-1.5711
1.0113
0.5598
-0.5598
-1.0113
-0.5911
0.0497
0.0769
-0.0769
-0.0497
2.9998
2.8487
2.4813
2.4813
2.8487
-0.0643
0.0608
0.0701
-0.0701
-0.0608
0.0396
0.3447
0.2304
0.1046
0.0612
0.3082
0.0612
0.1046
0.2304
0.3447
Table CI: Comparision of Changes in Mechanical Power
(1) Solving the EEAC equation and (2) Cusp Catastrophe Method
# of Critical Machine(s)
Critical Machine(s)
PM Limit (1)
PM Limit (2)
% Error
1
2
1.38718
1.27761
7.90%
1
3
1.460789
1.3396
8.30%
2
2&3
1.484128
1.36613
7.95%
Table C2 : Comparision of Changes in Mechanical Power
(1) Solving the EEAC equation and (2) Swallowtail Catastrophe Method
for WSCC test System
# of Critical Machine(s)
1
1
2
Critical Machine(s)
2
3
2&3
PM Limit (1)
1.38718
PM Limit (2)
% Error
1.3342
3.82%
1.460789
1.3811
5.46%
1.484128
1.428
3.78%
Table C3: Comparision of Changes in Mechanical Power
(1) Solving the EEAC equation and (2) Butterfly Catastrophe Method
# of Critical Machirie(s)
Critical Machine(s)
1
2
3
2
2&3
PM Limit (1)
PM Limit (2)
% Error
1.38718
1.460789
1.484128
1.3993
-0.87%
1.4779
-1.17%
1.4974
-0.89%
1
Table C4: Comparision of Changes in Mechanical Power
(1) Solving the EEAC equation and (2) Wigwam Catastrophe Method
# of Critical Machine(s)
Critical Machine(s)
PM Limit (1)
1
2
1.38718
1
3
1.460789
2&3
L484128
PM Limit (2)
1.3914
1.4696
1.494
% Error
-0.30%
-0.60%
-0.67%
62
2
2
2&3
0.0499
0.1254
1.5711
0.5911
2.9998
0.0643
0.3082
0.0396
Table 01 : EEAC Solution for Steady-State Stability for WSCC System
Critical Machine = 2
Chg, PM
Thgc
Thgu
Area 1(A1)
Area 2(A2)
A2- Al
0
0.283521
2.736472
0.000000
3.004233
3.004233
0.1
0.321075
2.698917
0.001873
2.762684
2.760811
.0.2
0.359205
2.660788
0.007530
2.528703
2.521173
0.3
0.397996
2.621997
0.017032
2.302412
2.285380
0.4
0.437545
2.582448
0.030450
2.083953
2.053503
0.5
0.477965
2.542028
0.047866
1.873489
1.825623
0.6
0.519386
2.500606
0.069372
1.671207
1.601835
0.7
0.561965
2.458027
0.095078
1.477322
1.382245
0.8
0.605889
2.414104
0.125106
1.292084
1.166978
0.9
0.651387
2.368605
.0.159604
1.115784
0.956181
1
0.698749
2.321243
0.198741
0.948765
0.750024
1.1
0.748347
2.271646
0.242724
0.791434
0.548711
1.2
0.800672
2.219320
0.291797
0.644287
0.352489
1.3
0.856406
2.163586
0.346267 •
0.507931
0.161664
1.31
0.862201
2.157791
0.352025
0.494917
0.142892
1.32
0.868041
2.151951
0.357841
0.482020
0.124179
1.33
0.873927
2.146065
0.363716
0.469240
0.105524
1.34
0.879861
2.140132
0.369649
0.456577
0.086928
1.35
0.885842
2.134150
0.375643
0.444034
0.068392
1.36
0.891874
2.128118
0.381696
0.431612
0.049916
1.37
0.897958
2.122035
0.387810
0.419310
0.031500
1.38
0.904095
2.115898
0.393985
0.407130
0.013146
1.381
0.904711
2.115281
0.394606
0:405919
, 0.011313
1.382
0.905329
2.114664
0.395227
0.404709
0.009482
1.383
0.905946
2.114046
0.395849
0.403501
0.007651
1.384
0.906565
2.113428
0.396472
0.402293
0.005821
1.385
0.907184
2.112809
0.397095
0.401087
0.003991
1.386
0.907803
2.112190
0.397719
0.399882
0.002162
1.387
0.908423
2.111570
0:398344
0.398678
0.000334
1.3871
0.908485
2.111508
0.398406
0.398558
0.000151
1.38711
0.908491
2.111501
0.398413
0.398546
0.000133
1.38712
0.908497
2.111495
0.398419
0.398534
• 0.000115
1.38713
0.908504
2.111489
0.398425
0.398522
0.000096
1.38714
0.908510
2.111483
0.398431
0.398510
0.000078
1.38715
0.908516
2.111477
0.398438
0.398498
0.000060
1.38716
0.908522
2,111470
0.398444
0.398486 •
0.000042
1.38717
0.908528
2.111464
0.398450
0.398473
0.000023
1.38718
0.908535
2.111458
0.398456
0.398461
0.000005
1.387181
0.908535
2.111457
0.398457
0.398460
0.000003
1.387182
0.908536
2.111457
0.398458
0.398459
0.000001
1 387183
0 908537
2 111456
0.398458
0 398458
0.000000
1.387184
0.908537
2.111455
0.398459
0.398457
-0.000002
63
C A S E CI: Cusp Catastrophe
U of CM
CMs
W
X Limit
PM Chg.
0.000
0.100
0.200
0.300
0.400
0.500
0.600
0.700
0.800
0.900
1.000
1.040
1.050
1.060
1.070 .
1.080
1.090
1.100
1.110
1.120
1.130
1.140
1.150
1.160
1.170
1.180
1.190
1.200
1.210
1.220.
1.230
1.240
1.250
1.260
1 270
1 2S0
1.290
1.300
1.310
1.320
1 330
1 340
1.350
1 360
I 370
1.380
1.390
Table CIA: WSCC System Steady-State Stab lity Analysis
Cusp Catastrophe Numerical Result
1
2
3
-12.6859
-12.21
. 17.3913
16.4217
x
,
cm = 2
cm = 3
5.9563
3.212
6.8514
4.1981
7.7464
5.1842
8.6414
6.1703
9.5364
.7.1564
10.4315
8.1425
11.3265
9.1286
12.2215
10.1146
13.1166
11.1007
14.0116
12.0868
14.9066
13.0729
15.2646
13.4673
15.3541
13.5659
15.4436
13.6646
15.5331
. 13.7632
15.6226
13.8618
15.7121
13.9604
15.8016
14.059
15.8912
14.1576
15.9807
14.2562
16.0702
14.3548
16.1597
14.4534 .
16.2492
< 14.552
16.3387
14.6506
16.4282
14.7493
16.5177
14.8479
16.6072
14.9465
16.6967
15.0451
16.7862
15.1437
16.8757
15.2423
. 16.9652
15.3409
17.0547
15.4395
17.1442
• 15.5381
' 17.2337 15.6367
17 3232
15.7353
17.4127
15.8339
17.5022
• 15.9326
17.5917
16.0312
17.6812
16.1298
17.7707
16.2284
17.8602
te 327
. 179497
16 4256
18.0392
16.5242
18.1287
16.6228
18.2182
16.7214
18.3077
16.82
18.3972
16.9186
:
64
2
2&3 >
-12.6373
17.2913
cm = 2,3
5.7267
6.5733
7.4198
8.2663
9.1128
9.9593
10.8059
11.6524
12.4989
13.3454
14.1919
14.5305
14.6152
14.6998
14.7845
14.8691
14.9538
15.0384
15.1231 .
.15.2078
15.2924
15.3771
15.4617
15.5464
15.631
15.7157
15.8003
. 15.885
15.9696
16.0543
16.1389
16.2236
16.3082 .
16.3929
' 16.4775
16.5622
16.6468
16.7315
16.8161
16.9008
16.9854
17.0701
17.1547
17.2394
17.3241
17.4087
17.4934
J O J D I U B J B J AV
CASE C 2 : Swallowtail Catastrophe
#ofCM
CMs
V
W
X Limit 1
X Limit 2
X Limit 3
PM Chg.
0.000
0.100
0.200
0.300
0.400
0.500
0.600
0.700
0.800
0.900
0.910
0.920
0.930
0.940
0.950
0.960
0.970
0.980
0.990
1.000
1.100
1.200
1.210
1.220
1.230
1.240
1.250
1.260
1:270
1.280
1.290
1.300
1.310
1.320
1.130
1.340
1.350
1.360
1.370.
1.380
L390
1.400
1.410
1.420
1,430
1.440
Table C2A:WSCC System Steady-State Stablity Analysis
Swallowtail Catastrophe Numerical Result
•2
-92.9012
-310.9311
-269.1737
190.5849
4393.9056
3
-258.0824
-1949.2561
-3141.8005
-3955.6934
40400.7569
2
2&3
-98.4546
-349.3318
-321.3642
154.5994
5013.4189
X
cm = 2
-102.6763
-115.1555
-127.6348
-140.114
-152.5933
-165.0725
-177.5518
-190.031
-202.5103
-214.9896
-216.2375
-217.4854.
-218.7333
-219.9813
-221.2292
-222.4771
-223.725
-224.973
-226.2209
-227.4688
-239.9481
-252.4273
-253.6752
-254.9232
-256.1711
-257.419
-258.6669
-259.9149
-261.1628
-262.4107
-263.6586
-264.9066
-266.1545
-267.4024
-268 6503
-269 898^
-271.1462
-272.3941
-273.642
-274.89
-276.1379
-277.3858
-278.6337
-279.8817
-281.1296
-282.3775
cm = 3
-3612.5506
-3637.397 .
-3662.2433
-3687.0897
-3711.9361
-3736.7825
-3761.6289
-3786.4753
-3811.3217
-3836.1681
-3838.6527
-3841.1374
-3843.622
-3846.1066
-3848.5913
-3851.0759
-3853.5606
-3856.0452
-3858.5298
-3861.0145
-3885.8609
-3910.7073
-3913.1919
-3915.6765
-3918.1612
-3920.6458
-3923.1304
. -3925.6151
-3928.0997
-3930.5844
-3933.069
-3935.5536
. . -3938.0383
-3940.5229
-3943.0076
-3945.4922
-3947.9768
-3950.4615
-3952.9461
-3955 4308
M^m'i
-3960.4
-3962.8847
-3965.3693
-3967.8539
-3970.3386
66
cm = 2,3
-146.8055
-159.0497
-171.2939
-183.5381
-195.7823
-208.0265
-220.2707
-232.5149
-244.7591
-257.0033
-258.2277
-259.4521
-260.6765
-261.9009
-263.1254
-264.3498
-265.5742
-266.7986
-268.023
-269.2475
-281.4917
-293.7359
-294.9603
-296.1847
-297.4091
-298.6335
-299.858
-301.0824
-302.3068
-303.5312
-304.7556
-305.9801
-307.2045
-308.4289
-309.6533
-310.8777
-312.1022
-313.3266
-314.551
-315.7754
-316.9998
-318.2243
-319.4487
-320 6731
'4mwi
-323.1219
J3)3UIGJBJ M
1 _
ml
C A S E C3: Swallowtail Catastrophe
#ofCM
CMs
u
v
w
X Limit 1
X Limit 2
X Limit 3
X Limit 4
PM Chg.
.
0.000
0.100 ,.
0.200
0.300
0.400
0.500
0.600
0.700
0.800
0.900
1.000
1.150
1.200
1.210
1.220
1.230
1.240
1.250
1.260
1.270
1.280
1.290
1.300
1.310
1.320
1.330
1.340
1.350.
1.360
1.370
1.380
I 390
1 400
1.410
1.420
1.430
1.440
1.450
1.460
1.470
1.480
1.490
1 500
Table C3A:WSCC System Steady-State Stablity Analysis
Butterfly Catastrophe Numerical Result
1
3
2
-30.567
-31.8518
-2.7095
-2.1112
379.8557
366.1891
521.1786
522.0345
566.7675
548.7188
-536.1656
-523.8765
-448.2173
-469.4369
X
cm = 2
cm = 3
-160.4373
-86.6668
-116.2494
-187.2882
-214.139
-145.832
-240.9899
-175.4146
-267.8407
-204.9972
-294.6916
-234.5798
-321.5424
-264.1624
-348.3933
-293.7451
-375.2442
-323.3277
-402.095
-352.9103
-428.9459
-382.4929
-469.2222
-426.8668
-482.6476
-441.6581
-485.3327
-444.6164
-488.0178
-447.5747
-490.7029.
-450.5329
-493.3879
-453.4912
, -496.073
-456.4494
-498.7581
-459.4077
-501.4432
-462.366
-504.1283
-465.3242
-506.8134
-468.2825
-509.4985
•471.2408
-512.1835
-474.199
-514.8686
-477.1573
-517.5537
480.1155
-520.2388
-483.0738
-522.9239
-486.0321
-525.609
-488.9903
-528.2941
-491.9486.
-530.9791
-494.9068
-533 6642
497.8651
-536.3493
-500.8234
-539.0344 .
-503.7816
-541.7195
. -506.7399
-544.4046
-509.6982
-547.0897
-512.6564
-549.7747
-515.6.147
-552.4598
-518.5729
-555.1449
-521.5312
-557.83
-524.4895
2
2&3
-31.7207
-2.7206
378.484
522.4602
565.4026
-534.5544
-449.7495
cm = 2,3
-154.282
-179.6775
-205.0731
-230.4687
-255.8643
-281.2599
-306.6554
-332.051
-357.4466
-382.8422
-408.2378
-446.3311
-459.0289
-461.5685
-464.108
-466.6476
-469.1872
•471.7267
-474.2663
-476.8058
-479.3454
•481.885
-484.4245
-486.9641
-489.5036
-492.0432
-494.5827
.-497.1223
-499.6619
-502.2014
-504.741
r507.2805
-509.8201
-512.3596
-514.8992
-517.4388
-519.9783
-522.5179
-525.0574
-527.597
-530.1366 ' .
-560.5151
-527.4477
-532.6761
. -563.2002
-530.406
-535.2157
68
008- '
—
J»)D1URJBJ M
CASE C4: Wigwam Catastrophe
#ofCM
CMs
t
u
V
w
x Limit 1
x Limit 2
x Limit 3
PM Chg.
0.000
0.100
0.200
0.300
0.400
0.500
0.600
0.700
0.800
0.900
1.000
1.050 .
1.100
1.150
1.200
1.250
1.270
1.280
1.290
1.300
1.310
1.320
1.330
1.340
1.350
1.360
1.370
1.380
1390
I 400
1.410
1.420
1.430
1.440
1.450
1 4o0
1.47(1
1.480
1 490
1.500
Table C4A:WSCC System Steady-State Stablity Analysis
Wigwam Catastrophe Numerical Result
1
2
2
3
2&3
-200.7626
-560.4905
-212.8567
-1338.3129
-8058.3963
-1497.1980
-1152.8688
-42971.4657
-1717.9517
2500.8998
-95814.1378
2171.5658
-786.6426
-71906.9151
-492.5274
2852.3826
-75600.0695
3136.1450
4086299.7255
133355984.4960
5063398.1860
X
cm = 2
-4440.142
-3916.0135
-3391.8849
-2867.7563
-2343.6278
-1819.4992
-1295.3706
-771.242 .
-247.1135
277.0151
801.1437
1063.208
1325.2723
1587.3365
1849.4008
2111.4651
2216.2908
2268.7037
2321.1165
2373.5294
2425.9423
2478.3551
2530.768
2583.1808
2635.5937
2688.0065
2740.4194
2792.8323
2845 2451
2897*65$
2950.0708
3002.4837 .
3054.8965
3107.3094
3159.7223
3212.1351
3264.548
3316.9608
3369.3737
cm = 3
-87242.6306
-86199.0822
-85155.5338
-84111.9854
-83068.4371
-82024.8887
-80981.3403
-79937.7919
-78894.2435
-77850.6951
-76807.1468
-76285.3726
-75763.5984
-75241.8242
-74720.05
-74198.2758
-73989.5661
-73885.2113
-73780.8564
-73676.5016
-73572.1468
-73467.7919
-73363.4371
-73259.0823
-73154.7274
-73050.3726
-72946.0177
-72841.6629
-72737.3081
-72632.9532
-72528.5984
-72424.2436
-72319.8887.
-72215.5339
-72111.179
-72006 8242
-71902.4694
-71798.1145
-71693.7597
cm = 2,3
-4520.0676
-4005.8112
-3491.5547
-2977.2983
-2463.0419
-1948.7854
-1434.529
-920.2726
-406.0161
108.2403
622.4967
879.625
1136.7532
1393.8814
1651.0096
1908.1378
2010.9891
2062.4148
2113.8404
2165.266
2216.6917
2268.1173
,2319.543
2370.9686
2422.3943
2473.8199 .
2525.2455
2576.6712
2628.0968
2679.5225
2730.9481
2782.3738
2833.7994
2885.2251
2936.6507
2988.0763
3039.502
3090.9276
3
3421.7865
-71589.4048
3193.77*9
70
APPENDIX D
SEVEN-MACHINE CIGRE TEST S Y S T E M
C A T A S T R O P H E M O D E L S SIMULATION R E S U L T S
( S T E A D Y - S T A T E STABILITY ANALYSIS^)
(CRITICAL MACHINE = 7)
C A S E DO:
S Y S T E M D A T A AND RESULT S U M M A R Y
CASED1:
CUSP C A T A S T R O P H E
C A S E D2:
SWALLOWTAIL C A T A S T R O P H E
C A S E D3:
B U T T E R F L Y CATASTROPHE
C A S E D4:
WIGWAM CATASTROPHE
72
C A S E DO: CIGRE System Data and Result Summary
Mk
0.0568
Table DO: CIGRE System Data of One Machine Infinite Bus (7 Machines, 17 Buses)
No of Critical Machine = 1, Critical Machine = 7
Mo
Pmo
PC
Tk
Alpha Delk
0.4005
-0.0684 .
-0.6525
4.4313
0.0869
0.1304
Table D l : Comparison of Changes of Mechanical Power Values
(1) Solving the EEAC equation and (2) Catastrophe Method
_ _ _ _
for CIGRE Test System
Catastrophe
Cusp
Swallowtail
Butterfly
Wigwam
Critical Machine
7
7
7
7
PM Limit (1)
2.80473
2.80473
2,80473
2.80473
PM Limit (2)
2.57149
2.62972213
2.84079
2.82713
% Error
9.07%
6.65%
-1.27%
-0.79%
73
Delo
0.0851
Table DO A: EEAC Solution of Steady-State Stablity forCIGRE System
Critical Machine: machine 7
Chg,PM
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6
.1.7
1.8
1.9
2
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.71
2.72
2.73
2.74
• 2.75
2.76
2.77
' 2.78
. 2.79
2.8
2.802
2.803
2.804731
2.X047336
2.8047346
Thgc
0.045297
0.068099
0.090982
0.113960
0.137047
0.160255
0.183599
0.207096
, 0.230762
0.254613
0.278668
0.302947
0.327470
0.352261
0.377344
0.402746
0.428497
0.454629
0.481179
. 0.508187
0.535697
0.563763
0.592441
0.621800
0.651917
0.682885
0.714812
0.747829
0.751196
0.754576
0.757969
0.761375
0.764795
0.768227
0.771673
0.775134
0.778608
0.782096
0.782795
0.783145
0.783751
0.783752
0.783753'
Thgu
2.922496
2.899694
2.876810
2.853832
2.830746
2.807538
2.784193
2.760696
2.737031
2.713180
2.689125
2.664846
2.640323
2.615532
2.590449
2.565047
2.539296
2.513164
2.486614
2.459606
2.432095
2.404030
2.375351
2.345993
2.315875
2.284908
2.252981
2.219964
2.216597
2.213216
2.209823 '
2.206417
2.202998
2.199565
2.196119
2.192659
2.189185
2.185697
2.184997
2.184647
2.184041
2.1X4040
2.184040
74
Area 1(A1)
0.000000
0.001139
0.004563
0.010280
0.018299
. 0.028634
0.041295
0.056299
0.073661
0.093398
0.115531
0.140080
0.167069
0.196523
0.228471
0.262943
0.299973
0.339596
0.381853
0.426788
0.474448
0.524886
0.578161
0.634338
0.693487
0.755690
0.821037
0.889629
0.896672
0.903747
0.910857
0.918001
0.925179
0.932391
0.939637
0.946919
0.954234
0.961585
0.963059
0.963797
0.965074
0.965076
0.965077
Area 2(A2)
7.104699
6.819258
6.538386
6.262099
5.990419
5.723367
5.460971
5.203259
4.950262
4.702017
4.458563
4.219941
3.986199
3.757388 .
3.533564
3.314788
3.101127
2.892654
2.689448
2.491598
2.299198
2.112355
1.931185
1.755818
1.586397
1.423083
1.266057
1.115522
1.100834
1.086214
1.071662
1.057177
1.042761
1.028413
1.014134
0.999924
0.985784
0.971713
0.968907
0.967505
0.965080
0 965077
0.965075
A2-A1
7.104699
6.818119
6.533823
6.251820
5.972119
5.694734
5.419676
5.146960
4.876601
4.608619
4.343032
4.079861
3.819130
3.560865
3.305093
3.051845
2.801155
2.553058
2.307595
2,064810
1.824750
1.587469
1.353024
1.121480
0.892910
0.667393
0.445020
0.225893
0.2Q4163
0.182467
0.160805
0.139176
0.117582
0.096022
0.074497
0.053006
0.031550
0.010128
0.005848
0.003709
0.000006
0.000000
-0.000002
CASE DI: Cusp Catastrophe
#ofCM
CMs
w
x Limit 1
x Limit 2 ,
PM Chg.
0.000
0.050
0.100
. 0.150
0.200
0.250
0.300
0.350 .
0.360
0.370
0.380
0.390
0.400
0.410
0.420
0.430
0.440
0.450
0.460
0.470
0.480
0.490
0.500
0.510
0.520
0.530 •
. 0.540
0.550
0.560
0.570
0.580
0.590
0.600
0.650
0.700
0.750
0.800
0.850
0.900 .
0.950
Table DI A: CIGRE System Steady-State Stablity Analysis
Cusp Catastrophe Numerical Result
1 .
•7 ' .
••
. '
' -12,0943
16.18897003
-16.18897003
X
PMChg
X
PMChg
2.1389
1.000
• 7.6026
2.000
2.4121
1.050
.7.8758
2.050
2.6853
1.100
8.1489
2.100
2.9585
1.150
8.4221
2.150
3.2317
1.200
8.6953
2.200
3.5048
1.250
8.9685
2.250
3.778
1.300
9.2417
2.300
4.0512
1.350
9.5149
2.350
4.1058
1.360
9.5695
2.360
4.1605
1.370
9.6241
2.370
4.2151
1.380
9.6788
2.380
4.2697
1.390
9.7334
2.390
4.3244
1.400
9.788
2.400
4.379
1.410
9.8427
2.410.
4.4337
1.420
9.8973
2.420
4.4883
1.430 .
9.9519
2.430
4.5429 .
1.440
10.0066
2.440
4.5976
1.450
10.0612
2.450 4.6522
1.460
10.1159
2.460
4.7068
1.470
10.1705
2.470
4.7615
1.480
10.2251
2.480
4.8161 1.490
10.2798
2.490
4.8707
1.500
10.3344
2.500
4.9254
1.5.10
10.389
2.510
4.98
1.520
10.4437
2.520
5.0347
1.530
10.4983
2.530
5.0893
1.540
10.553
2.540
5.1439
1.550
10.6076
2.550
.5.1986
1.560
10.6622
2.560
5.2532
1.570
10.7169
2 570
5.3078
1.580
10.7715
2 580
5.3625
1.590
10.8261
2.590
5.4171
1.600
10.8808
2.600
5.6903
1.650
11.154
2.650
5.9635
1.700
11.4271
2.700
6.2367
1.750
11.7003
2.750
6.5098
1.800
11.9735
2.800
6.783
1.850
12.2467
2.850
. 7.0562
1.900
12.5199
2.900
7.3294
1.950
12.793
2.950
75
X
13.0662
13.3394
13.6126
13.8858
14.159
14.4321
14.7053
14.9785
15.0331
15.0878
15.1424
15.1971
15.2517
15.3063
15.361
15.4156
15.4702
15.5249
15.5795
15.6342
15.6888
15.7434
15.7981
15.8527
15.9073
15.962
16.0166
16.0712
16.1259
164805
16,2352
16.2898
' 16.3444
16.6176
16.8908
17.164
17.4372
17.7103
17.9835
18.2567
<
S
II
3 1f
S
ta "«
5
l i s
sS
CO
O.
II '
3 31
|
S 31
•=
S
°"
M
u
«
I
U
II
J3JJIUBJFJ .«
CASE D2: Swallowtail Catastrophe
Table D2: CIGRE System Steady-State Stablity Analysis
#ofCM .
CMs
•. y
w
X Limit 1
X Limit 2
PM Chg.
0.000
0.100
0.200
0.210
0.220
0.230
0.240
0.250
0.260
0.270
0.280
0.290
0.300
0.310
0.320
0.330
0.340
0.350
0.360
0.370
0.380
0.390
0.400
0.410
0.420
0.430
0.440
0.450
0.460
0.470
0.480
0.490
0.500
0.510
0.520
0.530
0.540
0.550
0.560
0.570
0.580
0.590
0.600
0.610
0.620 .
0.630
X
-20943.715
-21)^04.2^73
-20984.7996
-20986.8538
-20990.9622
-2(jyy3.U165
-20995.0707
-20997.1249
-20999.1791
-21001.2334
-21003.2876
-21005.3418
-21007.396
-21UUy.45U3
-21U11.5U45
-21U13.5587
-21U15.bl3
-21017.6672
,-21Uiy.7214
-21021.7756
-21U23.82yy
-21U25.SS41
-21U27.y3«3
-2iu2y.yy25
-21U32.U46S
-21U34.1U1
-21U36.1552
-21U38.2Uy4
-21U4U.2637
-21U42.31/y
-21U44.3721
-21U4t>.4263
-21U48.48U6
-21Um^34«
-21U52.!)«y
-21UM.6433
-211D8.7M7
-21U6U.8U5y
-21Ub2.8b(J2
-21Ub4.yi44
-21U66.y686
-21Uby.U22«
-21U71.U771
-2111/3.1313
Swallowtail Catastrophe Numerical Result
1
7
-550.1042
-6568.4261
-20,275.68197
-21483.91942
PMChg
X
1.000
-21149.1377
1.100
-21169.6799
1.200
-21190.2222
1.210
-21192.2764
1.220
-21194.3306
1.230
-21196.3849
1.240
-21198.4391
1.250
-21200.4933
1.260
-21202.5475
1.270 \
-21204.6018
1.280 •
-21206.656
1.290
-21208.7102.
1.300
-21210.7644
1.310
-21212.8187
1.320
-21214.8729
•• 1.330
-21216.9271
1.340
-21218.9814
1.350
-21221.0356
1.360
-21223.0898
1.370
-21225.144
1.380
-21227.1983
1.390
-21229.2525
1.400
-21231.3067
1.410
-21233.3609
1.420
-21235.4152
1.430
-21237.4694
1.440
-21239.5236
1.450
-21241.5778
1.460
-21243.6321
1.470
-21245.6863
1.480
-21247.7405
1.490
-21249.7947
1.500
-21251.849
•1.510 ,
-21253.9032
1.520
-21255.9574
1.530
-21258.0116
1.540 •
-21260.0659
1.550
-21262.1201
1.560
• -21264.1743
1.570
-21266.2286
1.580 .
-21268.2828
. 1.590
-21270.337
1.600
-21272.3912
1.610
-21274.4455
1.620
-21276.4997
1.630
-21278.5539
77
PMChg
2.000
2.100
2.200
2.210
2.220
2.230
2.240
2.250
2.260
2.270
2.280
2.290
2.300
2.310
2.320
2.330
2.340
2.350
2.360
2.370
2.380
2.390
2.400
2.410
2.420
2.430
2.440
2.4502.460
2.470
2.480
2.490
2.500
2.510
2.520
2.530 •
2.540
2.550
2.560
2.570
2.580
2.590
2.600
2.610
2.620
2.630
X
-21354.5603
-21375.1025
-21395.6448
-21397.699
• -21399.7533
-21401.8075
-21403.8617
-21405.9159
-21407.9702
-21410.0244
-21412.0786
-21414.1328 •
-21416.1871
-21418.2413
-21420.2955
-21422.3497
-21424.404
-21426.4582
-21428.5124
-21430.5667
-21432.6209
-21434.6751
-21436.7293
-21438.7836
-21440.8378
-21442.892
-21444.9462
-21447.0005
-21449.0547
-21451.1089
-21453.1631
-21455.2174
-21457.2716
-21459.3258
-21461.38
-21463.4343
-21465.4885
-21467.5427
-21469.597
-21471.6512
-21473.7054
-21475.7596
-21477.8139
-21479.8681
-2148L9223
-21483.9765
CASE D3: Swallowtail Catastrophe
#ofCM
CMs
U
V
w
X Limit 1
X Limit 2
X Limit 3
X Limit 4
PMChg.
0.000
0.050
0.100
0.150
0.200
0.250
0.300
0.350
0.400
0.450
0.500
0.550
0.600
0.610
0.620
0.630
0.640
0.650
0.660
0.670
0.680
0.690
0.700
0.710
0.720
0.730
0.740
0.750
0.760
0.770
0.780
0.790
0.800
0.810
0.820
0.830
0.840
0.850
0.900
0.950
Table D3: CIGRE System Steady-State Stablity Analysis
Butterfly Catastrophe Numerical Result
'
x
-57.7339
-65.9294
-74.1249
-82.3204
-90.5158
-98.7113
-106.9068
-115.1023
-123.2978
-131.4933
-139.6887
-147.8842
-156.0797
-157.7188
-159.3579
-160.997
-162.6361
-164.2752
: -165.9143
-167.5534
-169.1925
-170.8316
-172.4707
-174.1098
-175.7489
-177.388
-179.0271
-180.6662
-182.3052
-183.9443
-185.5834 ..
-187.2225
-188.8616
• -190.5007
-192.1398
-193.7789
-195.418
-197.0571
-205.2526
-213.4481
PM Chg.
1.000
1.050
1.100
1.150
1.200
1.250
1.300
1.350
1.400 "
1.450
1.500
1.550
1.600
1.610
1.620
1.630
1.640
1.650
1.660
1.670
1.680
1.690
1.700
1.710
1.720
1.730
1.740
1.750
1.760
1.770
1.780
1.790
1.800
1.810
1.820.
1.830
1.840
1.850
1.900
1.950
79
1 .
7
-30.2547 '
-1.5145 •
362.79160
'516.045393
541.380387
-523.36753
-479.07337
. . X
-221.6436
-229.8391
-238.0345
-246.23
-254.4255 .
-262.621
-270.8165
-279.0119
-287.2074
-295.4029
-303.5984
-311.7939
-319.9894
-321.6285
-323.2676
-324.9067
-326.5458
-328.1848 .
-329.8239
' -331.463
-333.1021
-334.7412
-336.3803
-338.0194
-339.6585
-341.2976
-342.9367
-344.5758
-346.2149
-347.854
-349.4931
-351.1322
-352.7713
-354.4104
-356.0495
-357.6886
-359.3277
-360.9668
-369.1623
-377.3577
•
PM Chg.
2.000
2.050
2.100
2.150
2.200
2-250.
2.300
2.350
2.400
2.450
2.500
2.550
2.600
2.610
2.620
2.630
2.640
2.650
2.660
2.670
2.680
2.690
2.700
2.710
2.720
2.730
2.740
2.750
2.760
2.770
2.780
2.790
2.800
2.810
2.820
2.830
2 8-10
2.85!)
2.900
2.950
X
-385.5532
-393.7487
. 401.9442
410.1397
418.3352
426.5306
434.7261
442.9216
451.1171
459.3126
467.5081
475.7035
483.899
485.5381
487.1772
488.8163
490.4554
492.0945
493.7336 .
495.3727
497.0118
498.6509
-500.29
-501.9291
-503.5682
-505.2073
-506.8464 •
-508.4855
-510.1246
-511.7637
-513.4028
, -515.0419
-516.681
-518.3201
-519.9592
-521.5983
-523.2373
-524 876-t
-533.0719
-541.2674
CASE D4: Swallowtail Catastrophe
Table D4: CIGRE System Steady-State Stablity Analysis
Wigwam Catastrophe Numerical Result
1
7
-1196.449
-26902.2797
-243,545.09750
-1000194.528
-1,595,397.046960
-1,595,509.396349
-1,539,178.044549
• . -1,543,208.741521
1,445,059,990.943130
X
PM Chg.
X
PM Chg.
-1563569.865
1.000
-1554942.115
2.000
-1563138.478
1.050
-1554510.727
2.050 .
-1562707.09
1.100
-1554079.34
2.100
-1562275.703
1.150
-1553647.952
2.150
-1561844.315
1.200
-1553216.565
2.200
-1561412.927
1.250
-1552785.177
2.250
-1560981.54
1.300
-1552353.79
2.300
-1560550.152
1.350
-1551922.402
2.350
. -1560118.765
. 1.400
-1551491.015
2.400
-1559687.377
1.450
-1551059.627
2.450
-1559255.99
1.500
-1550628.24
2.500
-1558824.602
1.550
-1550196.852
2.550
-1558393.215
1.600
-1549765.465
2.600
-1557961.827
1.650
-1549334.077
2.650
-1557875.55
1.660
-1549247.8
2.660.
-1557789.272
1.670
-1549161.522
2.670
-1557702.995
1.680
-1549075.245
2.680
-1557616.717
1.690
-1548988.967
2.690
-1557530.44
1.700
-1548902.69
2.700
-1557444.162
1.710
-1548816.412
2.710
-1557357.885
1.720
-1548730.135
2.720
-1557271.607
1.730
-1548643.857
2.730
-1557185.33
1.740
-1548557.58
2.740 -1557099.052
1.750
-1548471.302
2.750
-1557012.775
1.760
-1548385.025
2.760
-1556926.497
1.770
-1548298.747
2.770
-1556840.22
1.780
-1548212.47
2.780
-1556753.942
1.790
-1548126.192
2.790
-1556667.665
1.800
-1548039.915
2.800
-1556581.387
1.810
-1547953.637
2.810
-1556495.11
1.820
-1547867.36
2.820
-1556408.832
1.830
-1547781.082
2 830
-1556322.555
1.840
-1547694.805
2.840
-1556236.277
1.850
-1547608.527
2.850
-1555804.89
1.900
-1547177.14
2.900
-1555373.502
1.950
-1546745.752
2.950
:
\.
#ofCM
CMs
t
u
V
w
x Limit 1
x Limit 2
x Limit 3
x Limit 4
x Limit 5
PM Chg.
0.000
0.050
0.100
0.150
0.200
0.250
0.300
0.350
0.400
0.450
0.500
0.550
0.600
0.650.
0.660
0.670
0.680
0.690
0.700
0.710
0.720
0.730
0.740
0.750
0.760
0.770
0.780
•. 0.790
0.800
0.810
0.820
0.830
0.840
0.850
0.900
0.950
81
-
X
-1546314.365
-1545882.977
-1545451.59
-1545020.202
-1544588.815
-1544157.427
-1543726.04
-1543294.652
• -1542863.265
-1542431.877
-1542000.49
-1541569.102
-1541137.715
-1540706.327
-1540620.05
-1540533.772
-1540447.495
-1540361.217
-1540274.94
-1540188.662
-1540102.384
-1540016.107
-1539929.829
-1539843.552
-1539757.274
. -1539670.997
-1539584.719
-1539498.442
-1539412.164
-1539325.887
-I53Y2 39 6(^1
-I5VJ1S3 332
-1539067.054
-1538980.777
-1538549.389 .
-1538118.002
00O009I-
0000S91-
APPENDIX
E
THREE-MACHINE WSCC TEST SYSTEM
CATASTROPHE MODELS SIMULATION RESULTS
(TRANSIENT STABILITY
ANALYSIS)
( C R I T I C A L M A C H I N E = 2)
AT
FAULT BUS = 5
AND
LINE OPEN B E T W E E N NODE 4 AND 5
83
©
o
co
NO
NO
ON
©
ON
ON
cs
o
ON
SO
NO
OS
I—H
ON
O
VO
CS
O
CO
00
w>
ON
NO
CO
ro
OS
SO
ro
-*
r~
o
CN
OS
SO
o
cs
o
, f>
ro
r~
r-~ ro
Ti
o
o
©
VO
o
©
s
cs
o
o
ON
vo
O
CO
CS
ON
ON
ON
SO
©
OS
SO
OS
00
««
SO
CS
o
SO
T3
O
6
o
w
>>
00 •/"> |
O '
•O
</">
Ti
00
NO
ON
00
00
CS
00
r—(
3
IS'
3
m
00
Ti
Os
O
O
OS
•n
r~
o
•/->
I
CN
•*
CS
CS
SO
o
o
©
SO
00
©
o
o
<L>
a
60
e
79
o
ft
P
© '
CS
CS
.
o
<n
1—1
TI
CN
00
SO
ca
CO
VO
o
ro
>n
Os
rOs
C SON
ro
I co
©
CS
I SO I
so
CS
o
Tl
SO
OS
S0
12
<U /~N
60 CS^
©
if
*°
©
o
o
SO
o
©
CNOS
SO
rro
ro
•a
CS
00
o
4
•—>
CS'
« '5. 1
8 3
•g
a
£^
u
NO
1—I
S
<N 1
•8
cs
ON
3
OS
o
CO
OS
sg
&
Ti
©
'2
vo
OS
OS
O
00
OS
CS
SO
SO
o
©
ON
ON
T
r-H
i—I
00
Tl
CN
00
o
o
o
CO
I*
e
s
l l
1
I
,3,
Ifel Si
o O
PL,
a,
ro
r~
cs
o
3
3
1
SO
"*
Ti-
03
Ii,
1
PL,
CS
ft
I
ca
to
ca
ca
3
4
O
ft
00
cs
a o
w 6 o
00
6 0 | 6p|
C
W
•a
o
p
cs
w
oo
21
00
oo.
8 ft
•S o
Ti
Q
E
Tl
Tl
Tl
OS
o
©
I' 3
T>
CS
CS
00
m
8 •8
o
ro
IT)
CS
CS
VO
ON
II
OS
00
<o
2
r»
CS
NO
NO
©•
I©I
ro
ro
PQ
ro
so
CS
OS
CS
CN
"O
fN
CO
00
OS
•a
t~>l•c.
O
1*1
O
60
u
60
g
1^'
NO
Tf
Tf
cs
co
p
vi
CS
NO
CO
CS
CS
CS
vo
co
vo
ON
CO
ON
CS
O
ON
Tf
O
vo
vo
co
Tf
CN
CS
00
ON
ON
ON
wo
CO
co
cs
co
co
cs
cs
cs
fcs
r~
t~
p
NO
t>
o
vi
00
Tf
Tf
cs
r-
*n
cs
cs
©
co
cs
00
Tf
o
ON
o
t*»
cs
cs
wo"
vi
ON
ON
CO
ON
cs
Vl
00
WN
CS
W
O
CN
O
ON
co
cs
cs
ON
c-
Vl
>o
Tf
co
Tf
ON
00
Tf
ON
NO
ON
o
>o
c-^
'
vo
co
ON
_|
vi
Tf
00
*o
wo
VI
•*
o
ro
cs
00
r-
Tf
00
Tf
CO
CO
NO
>o
o
V)
CO
r-
00
t>
NO
Vl
cs
Tf
00
NO
CO
CS
rNO
Tf
CO
Tf
Vl
•o
o
00
00
00
00
Tf
t>
cs
p
r~
Vl
TICS
C-^
Vl
Tf
CS
*ri
ON
o
o
CO
NO
—'
ON
00
00
Tf
ON
d
Tf
o
wo
00
Tf
cs
cs
o
ON
O
o
CO
cs
ON
00
00
Tf
ON
Vl
d
ON
CO
CO
•>!ON
VI
d
cs
Vl
CO
Vl
CO
Tf
c~
Vl
vi
00
NO
"f
00
o
00
tt-~
-
'
—'
CS
r~
p
cs
r-
CO
NO
ON
ON
NO
rcs
cs
CS
CS
VO
OO
Vl
CO
CO
r-
>o
o
*o
w-i
o
d
VI
NO
CS
cs
t-;
CO
CS
VN
vi
CO
CO
NO
Tf
00
ON
VN
00
Tf
ON
v>
co
o
o
ON
CO
O
VN
Tf
NO
ON
ON
o
Tf
NO
ON
00
rVN
CO
Tf
NO
•—* d—>
d
d
d
oo
00
vo
VO
ON
VO
00
00
NO
ON
NO
00
cs
cs
CS
d
cs
d
CO
00
Tf
•0CO
00
vi
d
00
NO
ON
*o
00
r~
cs
VN
ON
00
Tf
CO
ON
CS
Tf
ON
CS
00
CO
cs
cs
cs
CO
ON
cs
vo
*r\
VO
CO
wo
0
00
ON
Tf
00
CO
CO
w-i
CS
rON
CS
00
ON.
Tf
T?:
cs
VO
r-
WO
CO
•
—
< ON
r~
Tf
ON
rcs
CO
O
i
"t
NO
ON
Tf
CS
CO
WO
00
TjON
Vl
CO
ON
cs
o
o
cs
CS
NO
Tf
ON
NO
00
CO
CO
NO
NO
Tf
1
—
1
^
CO
VO
ON
00
00
00
ON
00
CO
wo
s> s> vi
CO
CO
r~
o r~
o
Tf
o
Tf
Tf
VN
OO
o
CO
NO
o
cs
*o
ON
Tf
CO
NO
Tf
NO
00
o
NO
00
Tf
VI
d
r-
ON
00
00
v»
cs
c~
ON
f~
r~
O
d
O
ON
I>
Tf
CO
0
ON
ON
VO
ON
cs
00
NO
Tf
00
ON
Tf
O
00
NO
ON
CO
NO
f~
cs
NO
NO
ON
ON
Tf
>o
Tf
^7*
t~
ON
NO
Tf
CO
CO
CO
00
00
ON
CO
Tf
CO
00
00
Tf
ON
VN
d
CO
r-
ON
00
00
Tf
ON
VN
d
ON
CS
r~
NO
00
CO
vt
-*
VI
CO
Tf
ON
NO
0
CS
CO
CO
CS
Tf
cs
cs
0
ON
Tf
00
vi
ON
v.
VN
CO
Tf
d
d
CO
00
r~
d
00
NO
ON
NO
00
c~
cs
VI
d
«n
00
cs
r>
0
00
CO
r-
r-
cs
CO
vo
Tf
0
p
CO
CO
ON
VO
ON
ON
00
O
CS
d
cs
cs
cs
ON
ON
00
00
Tf
ON
d
wo
d
CO
Tf
vo
co
vq
cs
CO
r-
WO
00
CO
CO
Tf
00
0
00
«n
vo
r-
—
O
r-
0
CO
cs
d
O
r»
Tf
CO
cs
d
>Ti
WO
CO
00
00
CO
00
ON
CO
CO
0
d
O
00
NO
ON
NO
00
00
VO
ON
VO
00
Tf
vi
t-;
cs'
rt
Tf
*r\ wo
rcs
^
00,
VO
ON
VO
00
cs
WO
NO
d
m
d
ON
00
00
—*
VI
Tf
wo
00
T"
00.
CO
cs
MO
•9 9
Tf
vi
cs
«o
cs
d
Vl
00
NO
ON
NO
00
C~
0
d
CS
d
Tf
CO
ON
cs
d
CO
00
NO
c-
o
d
Tf
0
0
ON
*Ti
~*
o
cs
0
vo
^ ~ ~
ON
ON
00
00
Tf
ON
cs
0
cs
r-
Vl
o
CO
Tf
»n
ON
*!•
o
vi
vo
o
t-
t>
Tf
cs
d
CO
^
ON
ON
CS
vi
CO
00
P~
cs
00
Tf
vi
V~i ON
Tf
WO
CO
00
CO
wo
r-
d
wo
Tf
o
'
^
©
o
o
o
o
d
wi
00
CO
ON
o
co
cs
o
cs
t-
~*
cs
wo
*o
«o
ON
"fr
tri
ON
cs
Vl
cs
cs
r~
cs
co
cs
rs
co
rs
00
00
vi
vo
cs
cn
cs
VI
cs
Tf
NO
9
ON
CO
CN
ON
r-
d
CS
rTf
C~
ON
V~t
00
o
00
ct-
00
ON
tf
CO
cs
vi
00
wo
©
r~
ON
SO
ON
00
00
Tf
ON
CO
NO
CS
00
00
00
"Ti
VD
TT
CO
Tf
OS
00
CO
00
CO
00
ID
Tf
vo
UJ
CO
ON
O
>o
Tf
a
t~
d
d
Tf
J3)3U1BJBJ M
APPENDIX F
SEVEN-MACHINE CIGRE TEST S Y S T E M
C A T A S T R O P H E M O D E L S SIMULATION RESULTS
(TRANSIENT STABILITY ANALYSIS')
(CRITICAL M A C H I N E = 7)
AT
FAULTBUS=9
AND
LINE OPEN B E T W E E N N O D E 9 A N D 10
87
SO
oo
3
ja
2
2
60 t> ,
so
O II
60 H "
a
E
6g I
3
w CJ
a
O
Q
a
3 !*
e
3
m
GO PL,
5
6
M
Xi
U S
• • OTJ
« .a
o
o
e
a
p S &l
«
»2
•f ^
O
CO
O
«
X
CQ
ON
00
3
II
x
 0
0
advertisement
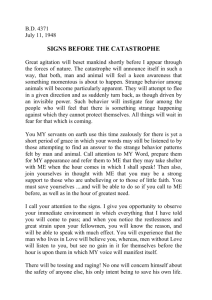
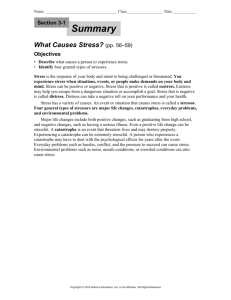

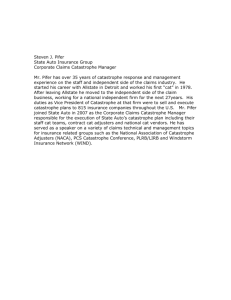

Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users