Pr. 3.1
advertisement

SOLUTIONS OF SELECTED PROBLEMS
Pr. 3.1
Eq. (3.12) in combination with (3.3) and the inequalities shown in footnote 2, ch.3,
(∂ 2G / ∂T 2 ) p = −(∂S / ∂T ) p = −C p / T < 0 .
Hence, we conclude that the Gibbs free energy G under constant pressure is a
imply that (∂G / ∂T ) p = − S < 0 and
1
decreasing function of T with negative curvature, as shown in Fig. S.1, where G is
plotted vs. T for the three phases of a substance (solid, liquid, gas). In making this
schematic plot we took into account the following inequalities:
S s (T , P ) < Sl (T , P ) < S g (T , P )
for T > 0K
(S.1)
Gs ( P) < Gl ( P ) < Gg ( P)
for T = 0 K
(S.2)
2
These inequalities stem from the characteristic physical features of each of the three
phases.
The variation δ GT of G as a result of a change δ P of the pressure, under
constant temperature, is given according to (3.12), by δ GT = (∂G / ∂P)T δ P = V δ P .
Since, for very low pressures, as in case (a) of Fig.S.1, the volume of the gas phase is
1
We consider the case of conserved particles and no exchange of matter with the environment. Thus the
number of particles N is constant.
2
In the solid phase the particles (atoms, or molecules, or ions) are undergoing small oscillations around
fixed positions in space. Thus the motion of each particle is restricted to a small volume (usually much
smaller than the volume per particle) around its fixed average position, and the distance d, between nearest
neighbor particles is kept more or less constant (its standard deviation, δ d , is usually of the order of 5% of
d).
In the liquid phase each particle is less restricted in its motion than in the solid phase, since it can move
over the whole extent of the liquid. However, it has to keep its distance from its nearest neighbors more or
less as in the solid phase (δ d / d ≈ 5%) .
In the gas phase the particles can move over the whole volume of the system and at the same time their
nearest neighbor distance exhibits large fluctuations (δ d / d ≈ 1) .
Since the motion of particles is less restricted as we go from the solid, to the liquid and finally to the gas
phase, the number of available microstates Γ for the liquid phase is larger than that of the solid phase and
smaller than that of the gas phase. Hence, in view of (3.3) the inequalities (S.1) follow. The inequalities
(S.2) can be deduced from the above remarks as well. Indeed, the fixed average positions of the particles in
the solid phase are the ones which minimize the Gibbs free energy at T = 0 . In the liquid phase the
particles sample many other configurations of slightly higher energies. Thus the difference Gl − Gs at
T = 0 K is positive but small (usually of the order of 3% of GS ), because in both phases the average
nearest neighbor distance is almost constant and such as to take advantage of the minimum of the energy
shown in Fig. 8.1. On the other hand, in the gas phase the particles do not exploit efficiently this minimum,
since their average nearest neighbor distance can be much larger than the distance corresponding to the
energy minimum. As a result the gas phase Gibbs free energy at T = 0 K is considerably larger than both
Gs and Gl .
The argument leading to the inequality Gs
< Gl
is based on the assumption that there are for the solid
phase fixed average positions minimizing the Gibbs free energy at T = 0 K . This assumption is valid for
all substances with only one exception: That of helium. Helium, being a noble gas, exhibits a very shallow
minimum − Eo (see fig. 8.1); at the same time, being the lightest atom (after hydrogen) has a large zero
point motion which is comparable to Eo . As a result the “solid” helium melts at T = 0 K , which means
that there is no solid phase. The absence of solid phase occurs as long as the pressure is lower that a critical
value Pc which turns out to be about 25 bars. A higher than Pc pressure stabilizes the solid phase at
T = 0 K making Gs < Gl .
very large, it follows that a drop in the pressure by δ P will result in a very large
drop in the gas phase Gg , while the effect on Gs and Gl will be small. Therefore,
for low enough pressures, the crossing points of Gg with either Gl or Gs will be to
P
(b)
Tm
0
Tb
T
P2 = const
P2 > P1
Gs
Gl
Gg
P
(a)
Ts
0
T
P1 = const
Gs
Gl
Gg
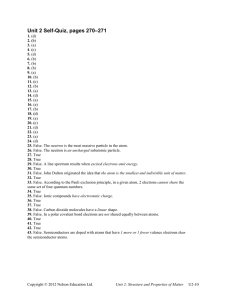
Fig. S.1 Schematic plot of the Gibbs free energy vs. absolute temperature (under constant
pressure) for each of the three phases, solid ( Gs ) liquid ( Gl ), and gas ( Gg ). (a)
The case of very low pressures, where the lowest value of G is that of the solid
phase for T < Ts and that of the gas phase for T > Ts . (b) The case of intermediate
values of pressure, where the lowest value of G is achieved by the solid phase (for
T < Tm ), then by the liquid phase (for Tm < T < Tb ), and finally by the gas phase
(for T > Tb ). Ts , Tm , Tb , are the sublimation, the melting, and the boiling
temperatures respectively.
the left of their own crossing, as shown in Fig.S.1(a). Moreover, as P → 0 the
temperature Ts corresponding to the Gg / Gs crossing point would approach zero,
since for P → 0 the volume of the gas phase goes to infinity. Since the lowest value
of G always corresponds to the equilibrium phase, it follows that for low enough
pressure we pass from the solid phase (being the equilibrium one for T < Ts ) through
a first order phase transition directly to the gas phase (for T > Ts ). Ts is the so-called
sublimation temperature.
As the pressure is increasing from zero, the temperature Ts of the G g / Gs
crossing is moving fast to higher temperatures until at some pressure Pt all three
curves will cross at the same point called triple point. The corresponding temperature
Tt will be close to the melting temperature Tm (the one shown in Fig. S.1 (b)), since
the Gs / Gl crossing is only slightly affected by the pressure change. For P > Pt the
situation is as in Fig. S.1(b) where the equilibrium phase changes from the solid to
the liquid one at Tm and then from the liquid to the gas one at Tb , through two first
order phase transitions.
As the pressure is increasing further, the gas phase Gs at high temperatures
( T > Tb ) resembles more and more that of Gl until at some critical pressure Pc and
above a critical temperature Tc the two curves merge smoothly together. This is to be
expected, since a gas at very high pressure such that the nearest neighbor particles
touch each other, hardly differs from a liquid.
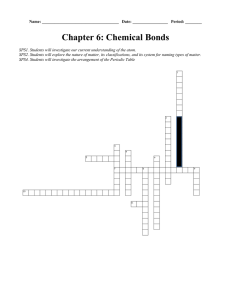
The previous analysis, based on (3.12) and on some simple physical arguments,
allows us to construct the phase diagram shown in Fig. S.2
P
Pc
gas
liquid
solid
Pt
gas
Tt
Tc
T
Fig. S.2 Schematic phase diagram indicating the regions in the T, P plane at which the
Gibbs free energy of the solid, or the liquid, or the gas phase is lowest and,
consequently gives the equilibrium phase. At the triple point ( Tt , Pt ) the three
phases coexist. At the critical point ( Tc , Pc ) the distinction between liquid and gas
phase disappears. The line separating the solid and the liquid phase, at which
Gs ( P,T ) = Gl ( P,T ) , is almost vertical, because the effect of the pressure on the
solid and liquid phases is usually minimal.
The reader is asked to prove the Clayperon-Clausius formula
dP S2 − S1 T ( S2 − S1 )
Q1→2
=
=
=
dT V2 − V1 T (V2 − V1 ) T (V2 − V1 )
(S.3)
where dP / dT is the slope of the coexistence curve between phase 2 and phases 1
(2=l and 1=s, or 2=g and 1=l, or 2=g and 1=s) where phase 2 is the one with higher
entropy, and Q1→2 is the latent heat required for the first order phase transition
1→ 2.
The reader is also asked to construct the phase diagram for the special case of
helium.
Pr. 3.2
The natural independent variables for Ω are V , T , µ , where µ is the chemical
potential. Moreover, Ω is an extensive thermodynamic potential and as such is
necessarily proportional to V . Hence, Ω = Vf (T , µ ) where the function f (T , µ )
can be expressed in terms of the pressure P by making use of the differential
d Ω = dF − µ dN − Nd µ = − SdT − PdV + µ dN − µ dN − Nd µ = − SdT − PdV − Nd µ .
It follows that (∂Ω / ∂V )T ,µ = − P = f . Therefore
(S.4)
Ω = −VP (T , µ )
Eventually we wish to express the thermodynamic quantities in terms of N rather
than µ . This can be achieved by solving the equation (∂Ω / ∂µ )V ,T = − N
∂P
= −V
or (∂P / ∂µ )T = N / V , as to express µ as a function of N / V and T .
∂µ T
Pr.4.1
There are two distinct mechanisms by which energy is transferred from the kinetic
energy of the body to the surrounding fluid. This transfer is described
macroscopically through the drag force F .
The first mechanism dominates for small, slow-moving bodies. It is due to the
velocity gradient within the fluid and as such it depends explicitly on the viscosity η .
The velocity gradient appears because very close to the surface of the body the fluid
is dragged along with the body, while at large distances the fluid remains undisturbed
by the motion of the body. In this case the drag force would depend, besides η , on
the body velocity υ (obviously) and on the linear extend of the body. The only
combination of η , υ, and with dimensions of force is the following
Fs = c1η υ ( S.5)
The numeral factor c1 is equal to 3π for a spherical object of diameter d ≡ .
The second mechanism, appropriate for large fast-moving bodies, is dominated
by the transfer of large amounts of kinetic energy to the fluid as a result of the
moving body pushing the fluid masses in front of it. Usually, through the implicit
action of the viscosity, the fluid motion becomes turbulent and eventually ends up as
heat. But even without the action of viscosity it is possible that the kinetic energy
transferred to the fluid not to be returned to the body. This description suggests that
the drag force in this case must depend on the cross section S of the body
perpendicular to the direction of its motion, on the density ρ of the fluid and, of
course, on the velocity υ . There is a unique combination of S , ρ and υ with
dimensions of force:
F = c2 ρ S υ 2
(S.6)
where the numerical factor c2 depends on the shape of the moving body and possibly
on the viscosity of the fluid. The dependence on the viscosity tends to disappear in
the limit of very high velocities (more correctly, of very high Reynolds numbers, see
below).
The ratio of these two forces (without the numerical factors c1, c2 ) is called the
Reynolds number R
R=
F ρ S υ 2 ρ υ S υ S
=
=
=
Fs
v
η υ
η
(S.7)
where v ≡ η / ρ is the so-called kinematic viscosity. For small R ( R 1) the drag
force is given by (S.5), while for large R ( R > 103 till 106 ) the drag force is given
by ( S.6) with c2 in the range 0.15 to 0.5.
What is R for a car going with 75 miles/hour?
What is R for a rain-drop of diameter 0.1 mm?
Pr. 4.2
The viscosity of a liquid is the analog of the shear modulus of a solid. A shear stress
in a solid leads to a shear deformation proportional to the stress (with the
proportionality coefficient µ s being the shear modulus), while a shear stress in a
fluid leads to a shear velocity proportional to the stress (with the proportionality
coefficient being the viscosity η ). It follows that from the dimensional point of view
η = µ sτ
(S.8)
where τ may possibly be a characteristic response time for the liquid. For a simple
liquid like water it is not unreasonable to assume, in the absence of anything more
convincing, that τ ≈ 2π / ωmax , where ωmax is a maximum angular frequency given
by (9.6), in spite of the fact that ωmax is related with the solid phase . For µ s we shall
take a typical value µs ≈ B / 3 where the bulk modulus B is given by (9.5). We have
then
η≈
B 2π
0,6 2
2π
ma
=
5
2
5
3 ωmax
3 m a r (e / aB r ) me
e B
or
η≈
0.6 × 2π 2
1
1
5
2 4
3
me aB / me aB r
ma
me
(S.9)
1 ma
= 1.26 3 4
me
aB r
For the water ma = Aw mu , Aw = 18 , and r ≈ 3.64 (from (9.3) with ρm = 1g/cm3 ).
Hence
ηw ≈ 0.915 × 10−3 kg/m ⋅ s
while the experimental values of ηw for different temperatures are
1.787 × 10 −3 kg/m ⋅ s , 1.002 × 10−3 kg/m ⋅ s, and 0.798 × 10−3 kg/m ⋅ s at t = 0o C ,
20o C , and 30o C respectively. This strong dependence of η on the temperature is
not accounted for by (S.9) which exhibits a very weak temperature dependence
through thermal expansion and, hence, a very small increase of r with increasing
temperature.
We shall attempt next to estimate the viscosity of air at T = 300 K and P = 1bar.
We shall treat the air as a perfect gas obeying the relations PV = N k BT and
1 mυ 2
2
= 23 kBT
where
m ≈ 29mu = 29 × 1823me .
We
find
that
V / N ≡ 43π r 3 = kBT / P ⇒ r 21.45A and υ = 3k BT / m = 508 m/s . The bulk
modulus B is equal to the pressure P , since B ≡ −V (∂P / ∂V )T = P . The
characteristic time τ will be taken as the ratio of the mean free path of a molecule
over its velocity. Therefore
η ≈ Bτ ≈ P / υ =
N
V
k BT / υ
But the mean free path = V / Nσ according to (4.18). Therefore
1
mk BT
(S.10)
3
σ
The total cross section σ is equal to π ro2 where ro will be taken as ro ≈ 3A .
η≈
Substituting in the expression for η we find
η ≈ 2.88 × 10−5 kg/m ⋅ s
while the experimental value is 1.98 × 10−5 kg/m ⋅ s . Moreover, the experimentally
determined temperature dependence of η follows a law η ∼ T s where s is roughly
equal to 0.8 instead of 0.5 predicted (S.10). Our failure to account for the temperature
dependence of η in both liquids and gasses suggests that we have missed an
important aspect of their characteristic time.
Pr.4.3
The surface tension coefficient σ is energy difference per unit area. This difference
is due to the fact that a particle (atom or molecule) at the surface of the liquid is less
bound that a particle in the bulk as a result of having fewer nearest neighbors. We
met a similar effect when we calculated the binding energy of nucleus in section 6.1.
The difference in energy per particle is 12 ( N Bε − N sε ) = 12 N Bε 1 − ( N s / N B ) ,
where N B ≈ 8 and N s ≈ 5 are the number of nearest neighbors in the bulk and at the
surface respectively (See section 6.1). The quantity 12 N Bε is slightly smaller than
the cohesive energy uc . (the difference uc − 12 N Bε =
T
∫o cdT , where c, the specific
heat per particle, is due to the fact that 12 N Bε refers to a non-zero temperature T
between Tm and Tb , while uc is by definition referring to T = 0 K ). The cohesive
energy
can
be
estimated
by
(9.4),
2
uc ≈ f u 2 / me aB2 r ≈ fu 27.2 / 3.64 2 = f u 2.05eV . For the metallic case fu ≈ 1 ,
while for water held by hydrogen bonds fu = 0.3 . Thus uc ≈ 0.62eV . The actual
values of 12 N Bε are 0.501eV and 0.423eV at T = 0o C and T = 100o C
2
respectively. The area per surface-particle is π r s aB2 where r s is considerably larger
that r , since surface-particles are more sparsely distributed that those in the bulk.
Hence we have
σ = (1 −
2
Ns 1
3 12 N Bε
) 2 N Bε / π r s aB2 =
NB
8 π x2 r 2a2
B
where x ≡ r s / r . By using the actual value of 12 N Bε = 0.501eV=8.026 × 10-20 J at
T = 0o C we find
σ=
0.2584 J
at T = 0o C
2
2
x
m
(S.11)
To obtain the experimental value of σ at T = 0o C we must choose x = 1.894 .
With this value of x and the experimental value of 12 N Bε = 0.423eV at
T = 100o C we find
σ = 0.061J/m 2 at T = 100o C
which coincides with the actual value at T = 100o C .
Pr. 4.4
The quantity (volume per second) of an incompressible fluid passing through any
cross-section S = π r 2 of a pipe depends obviously on the size of S . Moreover, it
must depend on the viscosity η of the fluid, since there is a velocity gradient (the
velocity of the fluid is zero at the wall of the pipe and it is maximum at the center of
the pipe). Finally, it must depend on a constant pressure gradient ∆p / ∆x along the
pipe; this pressure gradient is necessary for keeping the fluid running against the
friction forces due to the presence of viscosity at any section of the pipe.
Hence
dV
= c1S aη b ( ∆p / ∆x)c
dt
The only values of a, b, c, which make this formula dimensionally consistent are the
following: a=2, b= −1 , c=1. Thus
dV
= c1S 2 (∆p / ∆x) / η = c1π 2 r 4 (∆p / ∆x) / η
dt
where the numerical factor c1 turns out to be equal to 1/ 8π .
Pr. 4.5
(S.12)
By the very statement of the problem it becomes obvious that the skin depth δ must
depend on the conductivity σ and on the frequency ω . Moreover, since we are
dealing with a high frequency E/M phenomenon, the velocity of light must enter in
the formula for δ . In the G-CGS system, which we are using throughout this book,
σ has dimensions of 1/time. Hence the most general expression for δ satisfying the
dimensional requirements is
δ=
c
ω
ω
σ
f( )
where f is an arbitrary function of the dimensionless ratio x ≡ ω / σ . Let us assume
that f ( x) → x a as x → 0 .
Then
c ωa
ω
→0
ωσ
σ
We know that δ → 0 when σ → ∞ or when ω → ∞ , since then there is no
penetration of the E/M field within the metal. This implies that 0 < α < 1 .
Actually f ( x) = x / 2π for all values of x such that Re σ Im σ . So
δ = c / 2π σ ω
(S.13)
δ = c1
,
a
as
It is interesting to solve this problem by dimensional analysis while using the SI
system of units, in which there is a fourth basic quantity that of the electric current.
Pr. 4.6
According to (4.3) the E/M power per unit area emitted by a black body of
temperature T can be expressed as an integral over frequencies
∞
I = ∫ Iω (ω )dω
0
(S.14)
where according to (4.2)
x3
Iω (ω ) = A x ,
e −1
x = β ω ≡ ω / k BT
(S.15)
We denote by ωm the quantity which maximizes Iω (ω ) , i.e.
d Iω (ω ) / dω = [d ( x3 (e x − 1)−1 ) / dx][dx / dω ] = 0, for ω = ωm
3
x
(S.16)
−1
It follows from (S.16) that d ( x (e − 1) ) / dx =0 for x = xm , where xm = β ωm .
By implementing the derivative with respect to x we find that xm satisfies the
/ (e xm − 1) or
xm = 2.822, or ωm = xm / β = 2.822 k BT / relation 3 = xme
xm
(S.17)
By dimensional analysis we can obtain this result (without the exact numerical
factor), since ωm must depend on , kBT , and c : ωm = C1 m (k BT )n c p . The only
combination of m, n, p which makes this last relation dimensionally consistent is
m = −1, n = 1, and p = 0 which coincides with (S.17) for C1 = 2.82 .
Eq. (S.14) can be reexpressed as an integral over wavelengths by implementing a
change of variables from ω to λ = 2π c / ω , or ω (λ ) = 2π c / λ . We have then
∞
I = ∫ Iω (ω (λ )) dω / d λ d λ
0
(S.18)
The quantity λm is the one that maximizes the integrand Iω (ω (λ )) d ω / d λ
expressed as a function of λ . This integrand is different from the one in (S.14)
because of the extra factor
integrand in (S.17) is equal to
d ω / d λ = ω 2 / 2π c = x 2 / 2π c( β ) 2 . Thus the
A
x5
,
2π c( β ) 2 e x − 1
(S.19)
where now x = 2π c( β ) / λ . Setting the derivative of (S.19) with respect to λ equal
to zero is equivalent to setting the derivative d ( x5 (e x − 1)−1 ) / dx equal to zero. The
xm
/ (e xm − 1) or
xm = 4.965, or λm = (2π / 4.965)( c / k BT ) = 1.265( c / kBT )
(S.20)
By comparing (S.17) with (S.20) we see that λm is not equal to 2π c / ωm but
λm = (2.822 / 4.965)(2π c / ωm ). The extra factor (2.822 / 4.965) is due to the
latter gives 5 = xme
difference in the exponent of x between (S.19) and (S.15).
Dimensional analysis implies that
λm = C2 m ( kBT )n c p with m = p = 1 and n = −1 ,
which agrees with (S.20) if C2 = 1.265 .
Pr. 4.7
An electron behaving as a classical particle in a hydrogen atom will eventually fall to
the proton as a result of energy loss due to its E/M radiation. The time t needed for
the electron to fall on the proton must depend on the radius aB of its initial circular
orbit, the mass me (since the acceleration a depends on me ), the charge −e (both
the acceleration a as well as the radiation I depend on e2 ) and, finally, on the
velocity of light c (the radiation I depends on c ). Out of the three quantities a B ,
2
me , and e we can make a combination with dimensions of time, to = aB3/ 2m1/
e /e
2 1/ 2
and another one with dimensions of velocity, υo = aB / to = e / a1/
. Hence, the
B m
most general expression for the time t has the form
υ
t = to f o
c
where
f (υo / c)
(S.21)
is an arbitrary function of the dimensionless variable
2 1/ 2
υo / c = e / a1/
B m c.
It is reasonable to assume that the life-time t is inversely proportional to the
radiated power, which according to (4.5) is inversely proportional to the third power
of the velocity of light. This implies that f (υo / c) = b ⋅ c3 / υo3 , where b is a numerical
factor. Hence
(S.22)
t = baB3 me2c3 / e4
The period τ of the classical electronic motion in the absence of E/M radiation can
be determined from Newton’s equation of motion, which can be brought to the form
meω 2 r 2 =
e2
e2
⇒ ω2 =
r
me r 3
or, for t = 0
1/ 2
me aB3
e2
2π
(S.23)
ω =
τ
π
⇒
≡
=
2
2
ω
me aB3
e
To obtain an explicit result for the time t we can start from the equation of energy
loss due to the radiated E/M power, I , by the electron:
d e2
− = −I
dt 2r
2
where I = 23 e 2a 2 / c3 . The equation above is valid assuming that the fall to the
centre is very “slow” relative to the period τ , t / τ 1, so that in every revolution
to have the relation ε t ≈ ε P / 2. Under the same inequality, t / τ 1, the acceleration
a is essentially the centripetal acceleration:
a≈
e2
me r 2
Using the last three equations we end up with the following equation for r:
dr
4 e4
=−
dt
3 me2c3r 2
the solution of which is
r 3 = aB3 −
4e4
t
me2c3
(S.24)
By setting r = 0 we find that t is given by (S.22) with the numerical factor b being
equal to 1/ 4 . We must check whether t / τ 1 . Working in atomic units
( e = me = aB = 1, c ≈ 137 ) we find
t / τ =
c3
≈ 105
4 × 2π
and
c3
a.u. = 1.55 × 10 −11 s
(S.25)
4
If were zero, it would take 1.55 × 10 −11 s for the World, as we know it, to
disappear. Fortunately, is non-zero!
t Pr. 4.8
The lift force F on the wings of a plane must depend on the area S of the wings,
and on the velocity υ of the plane. Moreover, it must depend on the presence of air
(in the absence or air there is no lift force). The relevant properties of air are its
density ρ and its viscosity η . For large velocities we expect that the explicit role of
viscosity to be negligible as we argue in Pr. 4.1. Finally, the lift force must depend on
the angle of attack φ , i.e. the angle of the wings relative to the velocity of the plane.
For symmetry reasons the lifting power is zero, if φ = 0 . For small angles φ we can
keep only the term proportional to φ . Thus
F = c1ρ S υ2φ
(S.26)
where c1 is a numerical factor. In reality the shape of the wings, which can be
adjusted by the position of the flaps, determine an effective angle φ .
Pr. 5.1
The composition of the baryons ∆ ++ , Σ o , Ξ − is: ∆ ++ , uuu ; Σo , uds; Ξ − , dss .
Their main or exclusive decay processes are shown in terms of the Feynman
diagrams at the quark level
∆ ++ :
u
d
g
u
d
;
uuu → uuudd → uud + ud
∆ ++ → p + π +
The decay is through strong interaction. So the lifetime is expected to be in the range
10−24 s to 10−23 s . The actual value is 5.58 × 10−24 s .
Σ o : The Σ o particle is essentially an excited state of the combination uds . The
ground state of this combination is called the Λο particle. Thus
Σo → Λo + γ
This process is the analog of a deactivation of an atom, such as the 2 p → 1s + γ in
the hydrogen atom. The lifetime of Σ o → Λ o + γ , can be calculated by combining
(4.7) with the result 1.59 × 10−9 s for the transition 2 p → s + γ . This way we find
the lifetime to be 7.8 × 10−20 s vs 7.4 × 10−20 s for the measured one.
u
Ξ
d
u
−
W
dss → dsudu → uds + du →
-
→ Λo + π −
The decay is through a weak interaction. Thus the life time is expected to be of the
order of 10 −10 s . The measured value is 1.64 × 10 −10 s
Pr. 5.2
(a)
γ
γ
1
πo =
(uu − d d )
2
π o → 2γ
u or d
Decay
10
−19
u or d
through
E/M interaction with 2 vertices.
× 137s ≈ 10 s . Established value 8.4 × 10−17 s
Estimated
life
time
−17
(b)
µ+
νµ
π + = ud
π + → µ + + vµ
W+
u
( γ)
π − = du
d
π − → µ − + vµ
Both π + and π − decay through the weak interaction. So their lifetime is expected to
be of the order of 10 −10 s or so. Actually it is longer t = 2.6 × 10 −8 s because the rest
energy difference between the initial and the final state is the one for the muon
( 139.6 − 105.6 = 34 MeV ) rather than the one for the positron decay
( 139.6 − 0.5 = 139.1MeV ). On this basis, one may reasonably expect that the decay
to positron/neutrino pair ( e + , ve ) would dominate and it would produce a shorter life
time. However, selection rules in combination with the specific form of the weak
interaction Hamiltonian strongly suppress the decay channel π + → e+ + ve or
π − → e− + v e by a factor of the order me2 / mµ2 . This factor dominates over the rest
energy difference factor; thus the dominant decay channel is through the muons.
(c)
K + : us .
There are several decay channels, all of them through the
weak interactions. Some of the corresponding Feynman
diagrams are as follows:
µ+
u
νµ
d u
u etc
W+
u
u
s
K + → µ + + vµ
W+
s
K+ →π + +πο
The lifetime is expected to be 10−10 s or even larger. The actual value is
t = 1.238 × 10−8 s . The K − consists of su and exhibits quite similar properties.
o
(d)
The situation for K o ( d s ) and K ( sd ) is more complicated because each
one of them can change to its antiparticle through processes of the type:
o
d
K
w-
u
u
s
s
w+
d
Ko
o
The eigenstates are the symmetric and antisymmetric combinations of K o and K .
These combinations are eigenstates of the operator CP , where C is the operator of
charge conjugation and P is the parity operator: CPK s = K s and CPK L = − K L .
Since the CP is conserved in the decay reactions, the reactions K s → π + + π − or
K s → π o + π o are allowed (through a diagram similar to the second one in (c)
above), while K L → π + + π − or K L → π o + π o are not allowed. To satisfy CP
conservation
K L decays through the more complicated reactions
KL → π o + π o + π ο ,
K L → π + + e− + ve ,
K L → π − + e+ + ve ,
K L → π + + π − + π ο , which involve both a weak and a strong interaction. As a
result K L is more long-lived ( t = 5.116 × 10−8 s ) than K s ( t = 8.95 ×10−11 s ).
(e)
The particle J /ψ consists of the quark/antiquark bound state cc . It
decays through a channel involving a strongly suppressed strong interaction (due to
the so-called Okubo/Zweig/Iizuka rule) or through a channel involving E/M
interaction. The two channels are giving comparable contributions to the decay rate
(because of the suppression of the channel involving the strong interaction). Thus the
lifetime is in the range expected for E/M interactions, t ≈ 0.7 × 10−20 s .
u
u
e-
e+
g
c
Pr. 6.1
µ-
µ+
γ
γ
c
c
c
c
c
We assume that both U − 235 and U − 238 were created during a violent supernova
explosion practically at the same time, t = 0 , and of equal number N o . Thus their
number N1 (t ) and N 2 (t ) at any subsequent time t is
N1 (t ) = N oe −t /τ1
for
U − 235
− t /τ 2
N 2 (t ) = N oe
for
U − 238
Hence at present time t
1 1
1 1
N (t )
ln 2 = t − = 0.693 t −
N1 (t )
τ1 τ 2
t1 t2
or
0.693(1.421 × 10 −9 − 2.238 × 10 −10 )t = ln
99.284
0.716
or
t = 5.94 × 109 yr = 5.94 byr
It follows that the age of our planetary system t p must be smaller than the age of the
Uranium nuclei, while the age of the Universe is obviously larger than t :
t p < 5.94 byr < tU
Pr. 6.2
At least two factors influence the probability of each specific fission: 1) The rest
energy difference between the initial and the final state; the larger this difference the
more probable the reaction is. If both fragments had rest energies per nucleon lying
on exactly the same straight line fitting the − B / A vs. A for large A (A>150), then
this difference would be exactly the same no matter what the size of the two
fragments would be; in reality this factor favors slightly equal size fragments because
the − B / A vs. A curve does not follow this straight line as the value of A becomes
smaller but it bends to a small degree (see Figure 6.1). 2) If quantum mechanical
tunneling is involved in the fission process, even in a minute degree, then the reduced
mass of the fragments will enter in the exponent favoring unequal fragments which
produce smaller reduced mass. In the fission reactors the fission is achieved by
neutrons of almost zero kinetic energy (in order to increase the probability of neutron
caption by the uranium-235 nuclei); hence there, the tunneling is expected to play a
significant role strongly favoring unequal fragments. On the other hand, the nuclear
explosion in fission bombs occurs by very energetic neutrons for which tunneling
plays a very small role, if at all. Thus in bombs the equal size fragments are greatly
enhanced relative to those in nuclear fission reactors.
Pr. 7.1
The first ionization potential of Li can be estimated by recalling the basic features of
Fig. 7.2: I1 ≈ 5.4eV (actual value I1 = 5.3917 eV ). The third ionization potential is
that of hydrogen multiplied by Z 2 = 32 = 9 , where Z = 3 is the charge of the
nucleus of Li : I3 = 122.4eV . To obtain the second ionization I 2 potential we shall
compute variationally the sum of the second and the third ionization potential:
−( I 2 + I3 ) = K1 + K 2 + P1 + P2 + P12 , where K1 + K 2 is the kinetic energy of the
two electrons left after the 2s electron has been removed, and P1 + P2 is the
potential energy of the two electrons in the field of the nucleus and P12 is the
potential energy of their mutual repulsion. We shall assume that the 1s state
occupied by these two electrons has a size a instead of a B . Then the energies in
atomic units are: K1 = K 2 =
1
Z
51
, P1 = P2 = − , and P12 =
2
a
8a
2a
Thus
1
51
5
− 2Z − = x 2 − 2Z − x
a2
8a
8
where we set 1/ a = x . Minimizing with respect to x we find
1
5 1
x = 2Z − =
2
8 a
−( I 2 + I3 ) =
and
2
1
5
I 2 + I 3 = 2Z − a.u.
4
8
Thus for Li with Z = 3 we have
I 2 + I3 = 7.223 a.u. = 196.46 eV
(S. 27)
Therefore
I 2 = 196.46 − 122.4 = 74.06 eV
The actual value for I 2 is 75.64 eV .
We could have obtained a roughly estimated value of I 2 by subtracting from I3 the
repulsion of the two electrons assumed to be at an average distance of
1.75a : I 2 ≈ I 3 −
e2
, where a = aB / Z . For Z = 3 I 2 ≈ 75.77 eV . The choice
1.75a
of 1.75a satisfies the requirement of making the average distance between the two
electrons as large as possible without violating the Pauli principle. The “maximum”
choice of 2a , i.e. diametrically located electrons, will not allow any fluctuation in
the electron-nucleus-electron angle and, hence, it would violate the Pauli principle.
Pr. 8.1
To facilitate the calculations we shall use the following notations:
y ≡ d , A ≡ 4ε , x ≡ σ 6 / d 6 ≡ σ 6 / y 6 . We have then
dE dE dx
dx
=
= A(2 x − 1)
dy dx dy
dy
d 2 E dE d 2 x d 2 E dx
=
+
dy 2 dx dy 2 dx 2 dy
At equilibrium dE / dy = 0 so that
2
x=
1
⇒ y ≡ do = 21/ 6 σ
2
and
d 2E
d 2 E 36σ 12
36σ 12
)
2
A
=
=
=
eq .
dy 2
dx 2 y14
214 / 6 σ 14
36
72ε
= 8ε
= 2
1/ 3 2
4×2 σ
d
Thus we have the following numerical results:
o
do = 1.122σ = 3.82 A
o
κ = 51.41meV / A 2
Emin = − A / 4 = −ε = −10.4 meV
The frequency of oscillation is
3
ω = 72 ε
/ mr do2
10.4 ×10−3 0.529
1
= 72
a.u.
27.2 3.82 20 × 1823
72 × 10.4
0.529
= 10−3 ×
= 1.2 × 10−4 a.u.
3.82 20 ×1.823 × 27.2
= 4.97 × 1012 rad/s
ω = 3.26 meV
The dissociation energy D is given by:
D = ε − 12 ω = 8.77 meV
The fluctuation ∆d of the bond length is
∆d = / 2mrω = 1/ 2 × 20 × 1823 × 1.2 × 10−4
o
= 1/(2 × 2 × 1.823 × 1.2) = 0.338a.u. = 0.179 A
To see whether the molecule will survive at room temperature we have to compare
D with k BT ≈ 25meV at room temperature. Thus the answer is no.
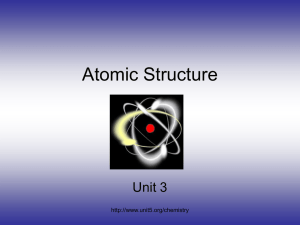
Pr. 8.2
(a)
(b)
(c)
In the figure above the four vibrational eigenmodes for the CO2 are displayed. (The
lowest one is doubly degenerate because the motion can take place either in the plane
shown or in a plane perpendicular to it). The vibrational modes must have no
component of translation of the centre of mass and no component of rotation as a
rigid body.
If κ is the “spring constant” of the C = O bond for displacement along the axis of
the molecule and κ ′ for perpendicular motion as in (c), we have κ κ ′ , since it is
much easier to bend than to compress the molecule. For the mode (a) the relevant
mass is that of the oxygen, mo = 16mu while for (b) and (c) the relevant mass is the
reduced mass between the carbon mass and twice the mass of oxygen (since the two
move in phase and with the same amplitude), m = 2 mo mc /(2 mo + mc ) = 8.73mu .
Hence the eigenfrequencies are:
ωa = κ /16mu
ωb = 2κ /8.73mu
ωc = κ ′ /8.73mu
Obviously the higher frequency is that of (b), since ω b / ωa = 2 × 16 / 8.73 = 1.91 ,
and
ω b / ωc = 2κ / κ ′ . For estimating
ωa
we
shall
use
(8.4)
with
d = 1.16 A ≈ 2.19a.u. and cν ≈ 2 (because we have a short strong double bond).
We obtain
ωa ≈ 0.00535a.u. = 145 meV
vs 172 meV which is the actual value of ωa . The eigenmode (a) is not responsible
for the greenhouse effect for two reasons: First, because of its symmetry, its dipole
moment remains zero which means that the coupling of this mode with the E/M field
is practically zero; second, the frequency ωm of the maximum of E/M radiation
emitted by the Earth is, according to (S.17), ωm = 2.82k BT ≈ 73 meV , i.e. way off
the eigenfrequency ωa . This last argument is even more convincing for excluding the
mode (b) as being responsible for the greenhouse effect (by the way the actual ratio
ω b / ωa = 291 meV /172 meV = 1.69 close to our estimate of 1.91). Thus the
degenerate mode (c) is the only one remaining as the culprit for the greenhouse
effect. Its eigenfrequency ωc must be close to 70 meV for the absorption to take
place under resonance conditions. Indeed the experimental value of ωc is
82.7 meV . From the ratio ω b / ωc = 291/ 82.7 we can deduce that κ / κ ′ ≈ 6.2 .
Pr. 8.3
The stereochemistry of each of the molecules has been determined by employing
either the unhybridized or one of the three hybridized atomic orbitals and trying to
create as many as possible strong bonds in order to lower the total energy. There are
cases where different stereochemistries seem to give about the same lowest energies.
, sp (1) hybridization for the two carbon atoms. The two
hybrids of each atom form a strong C − C bond and a
rather strong bond with each hydrogen. The carbon atoms form two more weak bonds
between their p y orbitals and between their p z orbitals.
sp(2) hybridization for the two carbon atoms. The sp(2)
hybrids combine the s, p x , p y orbitals to create the three
hybrids, which lie on the same plane and form 120o angles.
Thus there is a strong sp (2) , sp (2) bond between the two carbon atoms and a weak
bond between the p z , p z orbitals. The remaining sp (2) hybrids (two for each carbon
atom) are used for the bonding with the four hydrogen atoms as shown in the figure
above.
Both carbon atoms form sp (3) hybridization. For
each carbon atom the four hybrids are symmetric
and non-coplanar forming an angle of 109.47o
between any two of the four hybrids. One hybrid
from each carbon atom is used to form the single C − C bond. The other six hybrids
(three for each carbon atom) are used for the carbon-hydrogen six bonds. The
molecule is not planar. The hydrogens indicated by a are above the plane of the
printed figure and the ones indicated by b are bellow.
Each of the four carbon atoms forms sp (2)
hybridization. The molecule is planar and the
four p z orbitals (one for each carbon atom) will
be parallel to each other (to maximize V2 ) and
will be delocalized to lower the total energy. The
same hybridization may possibly be responsible
for an alternative star-like structure, shown to
the left. Again this structure will be planar and
the p z orbitals will be parallel to each other and
they will be delocalized in a symmetry way as to
lower the total energy.
Each carbon atom forms sp (3) hybridization with
four non-planar hybrids. All pairs of bonds
converging to the same carbon atom form an
angle of about 109 o. The molecules are not
planar. There are two possibilities: The carbon
atoms form a zig-zag chain or a star-like
structure. The latter results from the molecule
C3 H 8 by replacing one of the hydrogen
associated with the middle carbon atom by the
unit
Pr. 8.4
To solve this problem we need no more than a direct application of equations (8.9),
(8.10), (8.11), (8.13) and (8.14). We have
V2 = 1.94 eV, V3 = 4.415eV, V22 + V32 = 4.822
a p = 0.916, ε b = −9.365 − 4.882 = −14.247 eV
ε a = −4.543eV.
The charge transfer is given by the polarity index, namely 0.916 e .
The dissociation energy can be found by subtracting from the energy of
transferring a fraction of an electron from the cation to the anion,
0.916(5.14 − 3.61) = 1.401eV
the
Coulomb
attractive
energy
0.9162 e 2 / d = 5.12 eV : D = 5.12 − 1.401 = 3.71eV . The actual value of D is
4.26eV which is between the 3.71eV value and the value of 4.57 eV obtained by
assuming that the charge transfer is e .
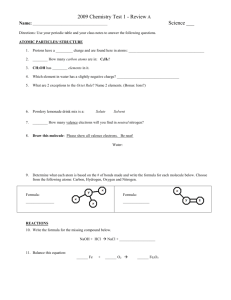
Pr. 8.5
H
H
C
H
C
C
C
C
H
H
C
H
In the figure above the structure of the benzene molecule is shown schematically
(left) as well as with the electronic clouds displayed explicitly (right). The molecule
o
is a perfect flat hexagon of C-C bond length of 1.39A and C-H bond length of
o
1.076A . Each carbon atom is mainly bonded through the three sp (2) hybrids shown
in the left figure above. Perpendicularly to the plane of the molecule are the six p z
carbon orbitals (one for each carbon atom). Each of these p z orbital is coupled to its
nearest neighbors by the matrix element V2 = −0.63 2 / me d 2 = −2.48eV .
Substituting in (ε − εν )cn(ν ) + V2cn(ν−1) + V2cn(ν+1) = 0, n = 1,..., 6; c7(ν ) ≡ c1(ν ) , the expression
cn(ν ) = co exp(iφν n) from (8.15), according to Bloch’s theorem, we obtain
(ε p − εν )co eiφν n + V2 (coeiφν n+ iφν + co eiφν n−iφν ) = 0
or
(ε p − εν ) + 2V2 cos φν = 0 ⇒ εν = ε p + 2V2 cos φν
(S.28)
the possible values of
c7(ν )
= c1(ν )
φν
are determined by the boundary condition
⇒ exp(i 7φν ) = exp(iφν ) or 6φν = 2πν , ν = integer, or φν = (π / 3)ν .
The physically non-identical values of φν correspond to six consecutive integer
values of ν which usually are chosen as symmetrically as possible with respect to
zero: ν = −3 (φ−3 = −π ) , ν = −2 (φ−2 = −2π / 3) , ν = −1 (φ−1 = −π / 3) , ν = 0
(φ0 = 0) , ν = 1 (φ1 = π / 3) , ν = 2 (φ2 = 2π / 3) . The corresponding values of εν
are
ε −3 = ε p + 2 V2 , ε −2 = ε p + V2 , ε −1 = ε p − V2 , ε 0 = ε p − 2 V2 , ε1 = ε p − V2 ,
ε 2 = ε p + V2
In the figure below the levels corresponding to the six delocalized states of the p z
orbitals of benzene are displayed. Notice that the level ε p − V2 and the level
ε p + V2 are doubly degenerate. The six electrons coming from the p z orbitals in
the ground state would occupy the level ε p − 2 V2 (two of them) and the degenerate
level ε p − V2 (four of them), so that the total energy reduction per electron would
be ( 4 V2 + 4 V2 ) / 6 = (4 / 3) V2 . If we have made pair of electrons in each of the
three bonds the energy reduction would be V2 per electron, i.e. smaller than the
delocalized configuration.
In the next figure we show schematically (not in scale) the s level of hydrogen ( sH )
and the s and p level of carbon ( sC , p z ,C ), the hybrid sp 2 atomic level of carbon
the bonding and antibonding molecular levels of each of the C-C bond as well as the
bonding and antibonding levels of each of the C-H bond. The six degenerate
molecular levels C-C, through couplings to their nearest neighbors are split to the
characteristic four levels (two of them doubly degenerate). A similar splitting occurs
at the six degenerate levels of C-H. The numbers next to each level show the degree
of its degeneracy. Overall we have twenty levels and thirty eigenstates, obviously as
many as the initial atomic states (6x4 for the carbon atoms plus 6 for the hydrogen
atoms). The highest occupied molecular orbital (HOMO) and the lowest unoccupied
molecular orbital (LUMO) are also shown
Pr. 9.1
The electronic contribution to the thermal energy, according to classical physics, is
equal to 32 k BT per electron assuming that the electrons are free of any force. Pauli’s
principle prevents the excitation of all those electrons which by increasing their
energy by 32 kBT will end up to a state already fully occupied by electrons. In other
words only those electrons N e′ which are in an energy zone of width of the order of
3k T
2 B
below the highest occupied level EF . All the other electrons are inert because
of the Pauli’s principle. It follows that the thermal total excitation energy ∆Ee is
3
2
N e′ kBT where N e′ is of the order of ρ F ( 32 kBT ) ; ρ F is the number of states per
unit energy at E = EF . We implicitly assume that k BT EF . The final result for
∆E is
2
∆Ee = a ( 32 ) ρ F ( k BT )
( )
2
2
where it turns out that the numerical factor a 32 is equal to π 2 / 3 . Hence the
electronic contribution to the specific heat Ce = d ( ∆Ee ) dT = (2π 2 / 3) ρ F k BT .
The ionic contribution to the thermal energy is equal to k BT per ionic degree of
freedom, according to classical physics. (There are 3N a − 6 3N a ionic degrees of
freedom where N a is the number of atoms). According to quantum physics, out of
the 3N a ionic vibrations, the only ones which can be thermally excited are those,
Nν , whose eigenfrequencies ω satisfy the inequality ω < ω = a k BT , while
the rest, 3N a − Nν , remain frozen and incapable of being thermally excited. The
number of eigenmodes with ω less than ω is proportional to ω 3 , for ω ωm ,
where ωm is the maximum eigenfrequancy. Hence, Nν ∝ ( a k BT )3 . Therefore the
total thermal ionic excitation energy is ∆Ei ∝ a3k B4T 4 and the corresponding
specific heat Ci is proportional to 4a3k B4T 3 , assuming that the temperature is low
enough so that k BT ωm .
Pr. 9.2
At the melting temperature and pressure the solid and the liquid phase coexist, which
implies the equality of the corresponding Gibbs free energies, Gs = Gl or
U s − TSs + PVs = U l − TSl + PVl
Usually the difference in volumes Vl − Vs is small and can be neglected. Thus
U −Us
T≈ l
Sl − S s
We
have
already
argued
that
U l − U s 0.03U s
where
2
U s N a uc 27.2 N a / r eV .The difference in entropies Sl − S s = a N a k B where
a is of the order of 1. Hence, by choosing a 1 , we have
2
0.03 × 27.2 / r eV 0.03 × 27.2
T=
=
11600 K
2
a
kB
ar
Pr. 9.3
0.03 × 27.2 × 11600
K ≈ 1050 K
9
ε p = −7.58eV ,
ε s = −14,79eV ,
ε h = (3ε p + ε s ) / 4 = −9.38eV ,
o
(for d = 2.35A) ,
V2h = −3.22 2 / me d 2
= 4.44eV
ε b = −13.82eV
CB: ε a ± (∈p − ∈s ) / 2 = −1.335eV, −8.545eV
ε a = −4.94eV ,
VB: ε b ± (ε p − ε s ) / 2 = −10.215eV, − 17.425eV
Eg = 1.66 eV vs. 1.17 eV for the actual value
Pr. 9.4
ε p,Ga = −5.67 , ε s ,Ga = −11.55 , ε h,Ga = −7.14 , ε p, As = −8.98 , ε s , As = −18.91 ,
ε −ε
ε h , As = −11.46 , ε h = (ε h, As + ε h ,Ga ) / 2 = −9.30 , V3h = hGa h , As = 2.16 ,
2
V2 h = −3.222 / me d 2 = −4.08 ,
V22h + V32h = 4.62 ,
ε a = ε h + V22h + V32h = −4.69 , ε b = ε h − V22h + V32h = −13.92
CB: ε a ± (ε p − ε s ) / 2 = −0.74, −8.64, ε j ≡ 12 (ε j ,Ga + ε j , As ), j = p or s
VB: ε b ± (ε p − ε s ) / 2 = −9.97, − 17.87
Eg = 1.33eV vs. 1.52eV for the actual value
Pr.9.5
The density of water is 1 g / cm3 and its molecular weight is 18. From (9.3) we find
r = 3.64 . The sound velocity in water is given by (9.7) with
f c ≈ 1.6 / 3.5 = 0.46 . Hence
that
co =
23.6 1
= 1530 m/s
18
r
from the relation co = B / ρ M and taking into account the calculated value of co ,
we have B = co2 ρ M ≈ 23900 bar = 2.39 × 109 N/m 2 . The actual velocity of sound in
fresh water at 25o C is 1497 m/s . For sea water the velocity of sound depends on
the salinity, on the depth and of course on the temperature; its value ranges from
about 1490 m/s up to 1550 m/s .
Pr.9.6
The concentration of atoms in pure crystalline Si can be obtained either from (9.3)
by taking into account that the density of Si is 2.33g/cm3 and the atomic weight is
28.086 or from the face centered unit cell (fcc) which contains 8 atoms and has a
o
lattice
constant
a = 4d / 3 = 4 × 2.35/ 3 = 5.427 A . The concentration is
8 / a3 = 5 × 1022 cm −3
The Bohr radius aB in hydrogen is aB = 2 / mee2 . The corresponding radius a
of the detached but trapped electron around the P impurity atom will be given by a
similar formula as that of a B but with e 2 replaced by e 2 / ∈= e 2 /12.1, where ∈ is
the dielectric function, and me replaced by m* = 0.32me . Thus
a = aB
The
binding
energy
o
12.1
= 37.8aB = 20A
0.32
e 2 / 2 ∈ a = (e2 / 2aB ) (1/ 37.8 × 12.1) =
is
−3
= 2.186 × 10 × 13.6eV = 29.7 meV . At room temperature T 295o K we expect
that most of those loosely trapped electrons will be excited to the conduction band
(CB). Thus, the electronic concentration at the CB will be a little lower than
10−6 × 5 × 1022 cm −3 = 5 × 1016 cm −3 .
The concentration of electrons in the conduction band for pure crystalline Si at
T = 295 o K will be
ni =
2
Σ k nk
V
(S.29)
−1
{
}
where nk = exp β (ε K − µ ) + 1 ; β = 1/ k BT ε k = 2 k 2 / 2m* and µ is the
chemical potential. From the conservation of the number of electrons we deduce that
the concentration of holes in the valence band (VB) is equal to ni : pi = ni . From this
relation we find that the chemical potential in the pure case is
µ=
Eg
2
+
3k BT mh*
ln *
4
me
(S.30)
where for Si m*h ≈ 0.68 me and me* ≈ 0.32 me . Having the value of µ we can
perform the summation over k in (S.29) to obtain the concentrations of electrons in
the CB and of the holes in the VB for the pure case. For the Si case we find (T in K):
ni = pi 1.54 × 1015 T 3/ 2 exp [ −6500 / T ] cm −3
which for T = 295 K gives
ni = pi ≈ 2.1× 109 cm −3
(S.31)
The resistivity is inversely proportional to the mean free path and inversely
proportional to the concentration of carriers. Therefore, the ratio of the two
resistivities ρ P / ρi is given by
l
ρ P ( ni + pi ) li li 4.2 × 109
=
≈
≈ 10−7 i
16
nP lP
lP 5 × 10
lP
ρi
The ratio li / lP is larger than one as a result of the extra scattering by the impurity
phosphorus atoms. But this ratio cannot be larger than ten. Hence, the introduction of
P atoms (one in every one million of Si atoms) reduces the resistivity by a factor of
more than six orders of magnitude!
Pr. 10.6 The period of revolution t of a planet around the Sun is proportional to 3/2 power of
the radius of its orbit assumed circular. Thus, assuming equal albedos, we have for
the ratio of the surface temperatures TM / TE
1/2
TM RE
=
TE RM
1/3
t
= E
tM
= 0.81
Using the calculated in Ch.10 surface temperature of Earth, TE = 256 K , we obtain
for the average surface temperature of Mars
TM = 207o K
Pr. 10.7 To have full moon the sun (S), the earth (E) and the Moon (M) must be almost along
the same straight line as shown in figure (a) below. After a full revolution of the
moon, it will be in the position M΄ of figure (b) where EM΄ is parallel to the line EM
of figure (a). For having again a full moon, the moon must take a rotation of 360+φ,
where φ is the rotation of the Earth around the Sun, as shown in Fig. (b). Hence,
during the time t f of two successive full moons, the Earth has made a rotation of φ
degrees, while the moon has made a rotation of 360+φ.
φ = ωE t f = 360t f / t E
360 + φ = ωM t f = 360t f / tM
where t E , t M are the periods of revolution of Earth around the Sun and of the moon
around the Earth. Therefore
ϕ
360 + ϕ
or
=
tM
tE
or
ϕ
360
=
tM
t E − tM
tf =
=
t E 360tM
tM
=
=
360 t E − tM 1 − (tM / t E )
27.32
= 29.53 days
27.32
1−
365.25
Pr. 10.8 Any reference system rigidly attached to the surface of the Earth is a non-inertial one,
because it participates to two accelerated motion of the Earth: (a) The motion of the
center of mass of the Earth in its orbit (assumed circular) around the Sun as well as
the rotation around its axis. Therefore, for the study of the motion of any mass m
relative to such non-inertial system we must add to the “actual” forces the noninertial forces: (a) The centrifugal force −m a , where a is the acceleration of the
center of mass of the Earth. (b) The centrifugal force due to the rotation of the Earth
around its axis, mω 2 r , where ω = 2π / 24 days-1 is the angular frequency of Earth’s
rotation around its axis and r is the vector from the centre of Earth to its surface.
(c)The Coriolis force −2mω × υ where υ is the velocity of the mass m , in the noninertial coordinate system, associated with the surface of the Earth (see Landau &
Lifshitz, Mechanics, 3rd ed. Elsevier, Amsterdam, 1976). The non-inertial force (b)
changes to a very small degree the acceleration of Earth’s gravity g at the surface of
the Earth (and it can be incorporated to it), while the force ( c ) is too weak to
substantially influence the tide motions, because the average velocities are very low.
Let us now consider the motion of a mass of water m under the influence of all
the “real” forces as well as the inertial force − ma . Among the “real” forces we shall
include the gravitational force from a celestial body X at a distance R from the Earth
as shown in the figure below.
The Earth’s gravitational force m g is compensated by the forces of the surrounding
water. The remaining forces are − ma + GM x mAK ′ /( AK ′)3 . Let us assume for the
time being that the acceleration a is due exclusively to the body X. Then
a = −GM X R / R3 .
So
the
total
force
is
equal
to
mGM X R / R 3 + AK /( AK )3 . When A is at the point Am of minimum
(
) (
)
distance from X, the total force points towards X and its magnitude is equal to
−2
mGM X ( R − r ) − R −2 ≈ mGM X 2 r / R 3 . When A is at the point AM of
maximum distance from X, the total force points away from X and its magnitude is
mGM X R −2 − ( R + r ) −2 = mGM X 2r / R 3 . In contrast, when A is at such a
ˆ ′ is almost 90o, then the two forces almost cancel each other. Thus
position that AKK
the tide will exhibit a periodicity between maximum effects of 12 (2π / ω ) ≈ 12
hours. (For a simpler explanation see Ch. 6 of Gravity by G. Gamov, Dover 2002).
In reality both the moon and the Sun influence the tides on Earth. Then there will
be two gravitational forces on the mass m of water (one from the moon and the other
from the Sun). But the acceleration of the centre of mass of the Earth will have also
two contributions one due to the moon-Earth centrifugal force and the other from the
Sun-Earth centrifugal force. Thus, when more than one celestial body play a role, the
only thing one has to do is repeat the previous analysis Earth-Body X and then sum
vectorially the resulting forces for every pair Earth-celestial body. Bellow we show
three relative positions of S, E, M.
Case (a) is the full moon. Case (b) is the new moon, and case (c) is the half moon. In
case (a) and (b) the maximum effects of moon and Sun act on the same direction and
hence we expect the maximum tides. In case (c) when the effect of moon is
maximum, the effect of the Sun is negligible and vice-versa.
The ratio of the maximum tide forces from the Sun and the moon is as follows
3
FS M S Rm3 1.99 × 1030 3.84 × 108
=
=
= 0.46
Fm M m RS3 7.35 × 1022 1.50 × 1011
In the case (c) a strong (moon) tide will be followed after six hours by a weak (Sun)
tide and after another six hours a strong (moon) tide will appear and so on.
Pr. 11.1
Rs = 2GM / c 2 = 2 × 5.97 × 1024 × 6.67 × 10−11 / 32 × 1016 0.85cm
2
8.85 × 10−3
S
= π
= 9.37 × 1065
−35
kB
1.62 × 10
Pr. 11.2 The pressure at the centre of a celestial body is given by (10.13),
Pc = ( F / 2)GM ρ / R where the numerical factor F is approximately equal to
0.2( ρo / ρ ) 2 . For ρo / ρ ≈ 5, F / 2 2.5 . The expression for the temperature is a
direct consequence of the perfect gas law PV = Nk BT and the definition of the
density ρ = Nm / V . The dependence of the radius R and the surface temperature T
on the mass of the star has been given in section 11.5 (see the text below (11.11) until
the end of the section). The answers to the other questions are also given in this text.
Pr. 12.1
Pph =
π2
3 3
45c (k BT )4 = 1.97 × 10 −7 bar
for T = 1089 × 2.725 = 2970 K
N
N
k BT ,
= 0.249 × 10893 , T = 2970 K
V
V
PB = 1.32 × 10−16 bar
PB =
Pν = 1× 10−7 bar, if Tν = 0.7138T ph and Nν = N ph /1.4
and mν c 2 k BT , T = 2970 K
If mν c 2 k BT then Pν 1.11 × 10 −7 bar.
Pr. 12.2 The quantity bk gives the average number of photons at an eigenstate of momentum
k and of given polarization and of energy ε k = ck . The quantity f k gives the
average number of electrons or positrons at an eigenstate of momentum k and of a
given projection of the spin.
The energy of
this state is
ε K = me2c 4 + c 2 2 k 2 ≈ ck , (in the extreme relativistic case). Obviously, the total
photon energy is obtained by summing the quantity bk ε k , which is the average
energy of the state k and of a given polarization, over all states, i.e. over all k ' s
and over the two polarizations,. The summation over k can be transformed to an
integration as suggested in Pr.12.2. Thus
E ph =
2V
(2π )
3
∫ 4π k
2
εk
dk
=
βε k
V
∫
∞
π2 0
dk k 2ε k
1
βε k
−1
e
where β ≡ 1 / k BT . Change variables to x = βε k = β ck , so that
E ph =
1
π 2 ( β c)3 β
V
∞
∫0
e
−1
dxx3
ex −1
The integral is equal to π 4 /15 . Thus
E ph =
π 2 ( k BT ) 4
15 (c)3
Compare this result with those in chapter 4. Because of the “chemical” reaction
e − + e+ γ
The chemical potentials must satisfy the relation
µe− + µe+ = µγ = 0
On the other hand, if the total lepton number is negligible, we have that N
from which we deduce that µ
e−
≈ µ + . Hence µ
e
e−
≈µ
e+
e−
≈N
e+
≈ 0 . The average number
of electrons at the state k is in general
fk =
1
e
β (ε k −µ )
+1
and in the present case of µ ≈ 0
fk ≈
1
e βε k + 1
,
ε k ≈ ck
with an identical expression for the positrons. Repeating the computations as in the
photon case, we have finally
E
e−
=E
e+
=
V ( k BT ) 4
π 2 (c)3
∞
∫0
dxx3
ex +1
The only difference from the photon case is in the integrand (a plus in the
denominator and not a minus). The value of the integral is 7π 4 /120 . Thus
E
e−
=E
e+
=
7π 2V ( kBT ) 4 7
= E ph
120 ( c)3
8