EMULATION OF A GE 1.5MW WIND TURBINE WITH A DC MOTOR
A Thesis by
Trevor David Hardy
Bachelor of Engineering, LeTourneau University, 2001
Submitted to the Department of Electrical Engineering and Computer Science
and the faculty of the Graduate School of
Wichita State University
in partial fulfillment of
the requirements for the degree of
Master of Science
December 2010
c
2010
by Trevor Hardy
All Rights Reserved
EMULATION OF THE GE 1.5MW WIND TURBINE WITH A DC MOTOR
The following faculty members have examined the final copy of this thesis for form and
content, and recommend that it be accepted in partial fulfillment of the requirement for
the degree of Master of Science with a major in Electrical Engineering
Ward Jewell, Committee Chair
John Watkins, Committee Member
Scott Miller, Committee Member
iii
DEDICATION
To my wife who made dinner so I could do homework: one degree down, one to go
iv
ABSTRACT
In order to provide a testing environment for generator control strategies, a wind turbine
emulator was developed. First, a mathematical model was developed for a GE 1.5MW wind
turbine generator based on modeling data provided by GE. Using this data a function
relating maximum power output and wind speed was developed along with a one-mass
model of the turbine. The model was implemented in a software simulation along with
controllers for a DC motor acting as the wind turbine and a dynamometer acting as the
generator. The software simulation was implemented in LabVIEW and read in a data file
containing high sample rate (20 Hz) wind speed data, calculated the optimal power from
that wind speed, and generated control signals for the DC motor and dynamometer.
The effectiveness of the controller was found by calculating the mean-square error between the optimal power calculated by the simulation turbine model and the actual power
produced by the DC motor/dynamometer combination. Two 800 second wind speed data
files were used as test inputs for the emulator: a low-speed low-frequency wind profile and
a turbulent or varying-speed wind profile. The results of the controller development using
these two wind speeds show that the turbine inertia is a significant factor in following the
optimal power output of a wind turbine. The time constant of the generator speed-tracking
function used by GE also plays a significant role in how quickly the system can respond to
changes in wind speed.
v
TABLE OF CONTENTS
Chapter
Page
1. INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
2. LITERATURE SURVEY . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
3. RESEARCH STATEMENT . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
4. RESEARCH METHODOLOGY . . . . . . . . . . . . . . . . . . . . . . . . . .
6
4.1
.
.
.
.
.
.
.
6
6
11
12
12
13
16
5. EXPERIMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
6. RESULTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
21
7. CONCLUSIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
8. FUTURE WORK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
4.2
8.1
8.2
8.3
Model Development . . . . . . . . . . . . . . . .
4.1.1 Turbine Power Model Development . . .
4.1.2 Turbine Mechanical Model Development
Emulator Design . . . . . . . . . . . . . . . . .
4.2.1 Software Simulation . . . . . . . . . . .
4.2.2 DC Motor And Dynamometer Control .
4.2.3 Mechanical System . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Programming/Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Emulator Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
30
30
REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
vi
LIST OF TABLES
Table
Page
4.1
Calculation of J from H . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
4.2
Natural Time Constant τ0 Calculations . . . . . . . . . . . . . . . . . . . .
12
6.1
Turbine Emulation with Varying Controller Weights and Wind Profiles . .
23
vii
LIST OF FIGURES
Figure
Page
2.1
Regions of wind turbine operation . . . . . . . . . . . . . . . . . . . . . . .
3
4.1
Power Coefficient Family of Curves . . . . . . . . . . . . . . . . . . . . . .
7
4.2
Power Coefficient Family of Curves with Peak Cp Function . . . . . . . . .
8
4.3
Power Output vs Wind Speed Over Various Shaft Speeds . . . . . . . . . .
10
4.4
Optimal Power Curve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
4.5
Turbine Block Diagram of the Entire Wind Emulation System . . . . . . .
13
4.6
Turbine Model Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . .
13
4.7
DC Motor Controller Block Diagram . . . . . . . . . . . . . . . . . . . . .
14
4.8
Dynamometer Controller Block Diagram . . . . . . . . . . . . . . . . . . .
15
4.9
Block Diagram of Mechanical System . . . . . . . . . . . . . . . . . . . . .
17
4.10 Photograph of Mechanical System . . . . . . . . . . . . . . . . . . . . . . .
17
5.1
Low Wind Speed Data vs. Time . . . . . . . . . . . . . . . . . . . . . . . .
19
5.2
Varying Wind Speed Data vs. Time . . . . . . . . . . . . . . . . . . . . . .
19
6.1
Typical Response of System Under Nominal Controller Weights to LowSpeed Wind Profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2
22
Typical Response of System Under Nominal Controller Weights to VaryingSpeed Wind Profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
6.3
Response of System while Dynamometer Integrator is Wound-Up . . . . .
24
6.4
Response of System to Setting Dynamometer Integrator Weight to Zero . .
24
viii
CHAPTER 1
INTRODUCTION
As the costs of fossil fuels, both financial and environmental, become more obvious
to society, there has been a renewed and increased effort in developing alternative energy sources, particularly as it relates to electrical power production. One of the leading
prospects in this search for clean and commercially viable production are horizontal-axis
wind turbines. The United States Department of Energy has headed up a collaboration of
institutions to explore and define the effort of having 20% of the US energy produced by
wind turbines by the year 2030 [1]. Wind turbines are currently being used in large-scale
parallel configurations as alternatives to traditional fossil-fuel power plants and are being
considered for local and neighborhood energy sources in smart- and micro-grid research [2].
In both uses, development of efficient and effective generator control strategies to allow for
the maximum energy capture from the wind are of great importance.
Typically these strategies are tested using software models and simulations and, in
academic settings, are rarely if ever able to be developed on real-world wind turbines. To
provide a more realistic test environment for generator control techniques, an effort has
been made to develop a wind-turbine emulator where an electrical motor directly drives
the shaft of the generator in a manner that mimics that of a turbine. The goal of this
project was to develop such a test platform using as much real-world data as possible.
1
CHAPTER 2
LITERATURE SURVEY
In building a wind-turbine emulator one of the key issues is the type of model to be
used for software simulation. The input to the emulator is recorded wind speed data which
is then applied to this turbine model to produce the reference power output which in turn
is used in controlling the motor to produce the mechanical power for the emulator.
A fundamental aspect of turbine modeling is the aerodynamic effects, that is, a model
which describes the affects of wind on the turbine blades. The fundamentals of this idealized
model are widely available in literature ([3], [4], [5]) where the mechanical power output
of the turbine is a function of parameters such as air density, turbine rotor area, turbine
rotor speed, and wind speed. This relationship is fundamental to building a wind turbine
emulator and in this case, a key document was obtained from GE which gave details for
these parameters on its 1.5MW turbine [6].
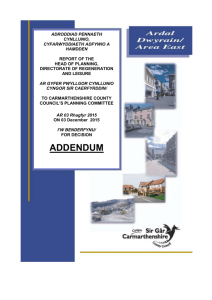
Another key matter in the aerodynamic model is that of blade pitch control. Wind
turbines intended to be used for commercial power production commonly have blades whose
pitch can be varied as wind conditions change. To understand the role of blade pitch it is
important to first define the regions of operation that a wind turbine typically experiences.
If we imagine a steady breeze that starts at zero and steadily increases in speed, the first
critical point the turbine encounters is the cut-in speed. Below this speed the wind turbine
does not operate at all; once this speed is reached, the turbine begins to produce power.
As the wind speed increases the next critical point that is reached is the rated wind speed.
This is the point at which the generator is spinning as fast as it can and producing as much
power as possible. Up to this point, the blades on the wind turbine have been pitched to
capture as much energy from the wind as possible. Once the wind speed exceeds the rated
wind speed, the turbine blades begin to adjust their pitch to shed or bypass some of the
energy in the wind. The turbine continues to produce its maximum power even though
2
the wind speed is larger than the turbines rated value. As the wind speed increases, the
turbine continues to adjust the pitch of its blades until they reach their mechanical limit.
At this point, the turbine must shut-down to prevent damage to itself. This point is called
the cut-out speed [4] [6]. A graph showing these regions of operation is shown in Figure
2.1 where θ represents the blade pitch angle.
Θ = max.
Power
Θ = min.
Θ = min.
Cut-in speed
Rated speed
Cut-out speed
Wind Speed (m/s)
Figure 2.1: Regions of wind turbine operation
The mechanical model of the turbine system as a whole (usually including the gearbox
and appropriate shafts) are also important. There are existing models including higher
order effects such as shaft elasticity and gearbox inertia ([7] [8], [9], [10], [11]), often referred
to as “two-mass” or “three-mass models”, depending on how many significant mechanical
components are included in the model. It was determined early in development of the
emulator that including these effects in our turbine model was beyond the scope of this
project and thus they are neglected. A simple and significant model parameter that was
included, though, was the inertia of the turbine. Mechanical inertia in wind turbine power
3
generation plays a significant role by limiting the rate at which the system can respond to
changing wind conditions, for better or for worse. There are many examples in literature
on modeling the effects of inertia ([11], [12], [13]) and because of the obvious and significant
effect it has on the frequency response of the system, it was included in this emulator as a
component of the software simulation. This is referred to as a “one-mass” model.
Several publications were found where other groups had constructed wind turbine emulators using similar ideas as the ones proposed here. ([3], [5], [7], [8], [10], [14], [15], [16],
[17]). To produce the mechanical power, the most common type of motor used was the
DC motor due to the direct relationship between motor torque and rotor current. Some
of these papers also outline control strategies for the motor, most involving a dual-loop
control: an outer power control loop responds to changing wind conditions to produce
an updated reference power and the inner control loop is a much faster loop designed to
control the moment-by-moment fluctuations in the motor’s torque. This inner loop used
the reference power calculated by the outer loop to calculate a reference torque (given the
system’s rotational speed) which is directly proportional to rotor current. These efforts
were considered when developing the control strategy for our wind turbine emulator.
4
CHAPTER 3
RESEARCH STATEMENT
The goal of this project was to design, build, and test a wind turbine emulator capable
of modeling the behavior of a GEs 1.5MW wind turbine. The mechanical behavior of the
turbine was simulated in software and only took into account the inertia of the turbine; all
other mechanical effects such as tower shadow effects and shaft elasticity were neglected.
Since the intended use of this emulator was to enable research and development in generator
control strategies rather than pitch control strategies, the pitch control of the turbine
was idealized in the simulation. Thus, it was assumed that the virtual turbine blades
would always be pitched at the optimal angle for a given wind speed and that they could
instantaneously adjust as the wind conditions changed. Also, the cut-in and cut-out speed
limitations were removed as the emulator is not intended to be used in shut-down or startup situations. The emulator functions for all wind speeds. The control signal for the
turbine was recorded wind speed data.
Outputs from the software simulation and controller were used to control a motor which
acts as the mechanical stand-in for the turbine. Due to the lack of availability in our lab
of an existing doubly-fed induction generator (DFIG) which could operate over the range
of the speeds needed, a dynamometer was used instead to provide a load to the DC motor.
An independent control strategy based on data provided by GE was used to determine the
mechanical loading that the dynamometer provided in its role as a stand-in for a DFIG.
Based on restrictions detailed in the document provided by GE on the modeling of their
turbines behavior, it was determined that this emulator would only be for non-start-up or
shut-down conditions. The turbine would operate under ”steady-state” conditions with the
assumption that it had already ramped up to a speed appropriate for the wind conditions
at that moment.
5
CHAPTER 4
RESEARCH METHODOLOGY
4.1
Model Development
4.1.1
Turbine Power Model Development
In designing the wind turbine emulator, a power curve for the turbine must first be
developed. This curve defines the relationship between the maximum mechanical power
the turbine can produce versus wind speed. In literature ([5]), the fundamental relationship
is given as
1
P = ρAv 3 Cp
2
(4.1)
where ρ is the air density, A is the swept area of the turbine rotor, v is the wind speed,
and Cp is the power coefficient of the turbine. The power coefficient is a measure of how
efficiently the turbine is able to harvest energy from the wind and is itself a function of a
parameter called the tip-speed ratio, λ.
λ is the relationship between the speed at the tip of the turbine blade and the wind
speed. λ is defined as
λ=
ωR
v
(4.2)
where ω is the mechanical rotational speed of the turbine shaft, R is the turbine radius,
and v is the wind speed. Low values of λ indicate cases where the wind speed is relatively
close to the rotational speed of the turbines. Very high and very low values of λ indicate
situations where there is a high degree of mis-match between wind speed and the tip-speed
of the turbine blades (and hence, turbine rotation) [6]. For example, a turbine the is just
starting up in a high wind-speed condition would have a low value of λ. The shape of the
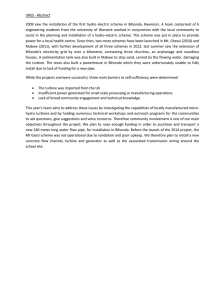
typical power coefficient curve (Cp vs λ) is shown in Figure 4.1.
Modern high-power wind turbines have the ability to adjust the pitch of their blades,
6
Cp vs ! at Various Blade Pitch Angles
"=0
" = 2.5
"=5
" = 7.5
" = 10
0.5
Cp
0.4
0.3
0.2
0.1
0
2
4
6
8
!
10
12
14
16
Figure 4.1: Power Coefficient Family of Curves
that is, the angle at which the edge of the blade meets the wind. Blade pitch alters the
shape of the power coefficient curve, with higher blade pitches pushing the peak of the
curve to lower values of λ but also lowering that peak overall. Including blade pitch as a
factor in the power coefficient curve produces a family of curves as shown in Figure 4.1.
Having this extra degree of freedom permits the turbine control system to operate more
efficiently by allowing it to operate at the maximum point on a power coefficient curve.
That is, for a given set of conditions, the blade pitch can be adjusted to find the point
where Cp (and thus power output for those conditions) is maximized.
The wind turbine emulator being developed was based on a GE 1.5MW wind turbine.
GE provided a document ([6]) detailing many of the aspects of modeling their wind turbine
and generator system and including a mathematical procedure for computing the power
coefficient curve for this turbine. Due to the high precision of the provided coefficients,
7
a Matlab script was written to handle the computations and form the curves, shown in
Figure 4.2.
Cp vs ! at Various Blade Pitch Angles
C (all blade pitches)
p
Peak Cp (optimal blade pitch)
0.5
Cp
0.4
0.3
0.2
0.1
0
2
4
6
8
!
10
12
14
16
Figure 4.2: Power Coefficient Family of Curves with Peak Cp Function
As can be seen, for a given turbine shaft speed ω and a given wind speed v, there is a
specific blade pitch that produces the largest value of Cp . This represents the configuration
that will capture the greatest amount of energy from the wind. Notice that either changes
in turbine rotational speed or changes in wind speed (both effectively changing λ) can
motivate a change in blade pitch to stay at the point of most efficient energy capture.
Since the emulator is seeking to reproduce the effects of the mechanical turbine, including
blade pitch, it was decided that blade pitch could be assumed to always be in the optimal
position for the conditions at any given time and would be able to instantaneously adjust
as the conditions changed. This simplified the software simulation by not requiring a blade
8
pitch controller.
By assuming that λ can be maintained at the value necessary to produce a maximum
value for Cp under a given set of conditions, it is possible to calculate the maximum power
output from the turbine as a function of wind speed v and a function was fit that follows
the peak point of each curve in the family. This function defines the maximum value of
Cp as a function of λ which is itself a function of turbine shaft speed ω and wind speed
v. Using equation 4.1, it is possible to form a separate family of curves where the turbine
output power P is a function of wind speed and turbine shaft speed. This family of curves
is shown in Figure 4.3 where each individual curve shows the output power for a given
turbine shaft speed as a function of wind speed.
7
6
Pmech (pu) =1.4999 × 10−8 vwind
− 1.4782 × 10−6 vwind
(4.3)
5
4
+5.5785 × 10−5 vwind
− 1.0045 × 10−3 vwind
3
2
+8.5977 × 10−3 vwind
− 2.5148 × 10−2 vwind
+2.8366 × 10−2 vwind − 5.3550 × 10−3
For a given wind speed, this family of curves shows that there are a variety of turbine
shaft speeds that reside on the maximum Cp curve. For each wind speed, though, there is
only one value of turbine shaft speed ω that produces the maximum power output. Looking
at Figure 4.3 it is clear that at a given wind speed, the maximum power is generated on
the highest curve available at that windspeed. Using this fact, Matlab was used to find the
largest value of ω at each wind speed and a function was fit to these points; this function
defines the maximum power curve for a GE 1.5MW wind turbine and is shown in Figure
4.4 and equation 4.3. Note that the maximum power output defines both a unique turbine
blade pitch and turbine shaft speed. Using this maximum power curves, it is possible to
define a target power output for the turbine emulator based solely on windspeed.
9
Pmech (pu)
Peak power vs wind speeds at various shaft speeds !
1
Maximum !
Minimum !
0.8
0.6
0.4
0.2
0
0
5
10
Windspeed (m/s)
15
Figure 4.3: Power Output vs Wind Speed Over Various Shaft Speeds
Figure 4.4: Optimal Power Curve
10
Table 4.1: Calculation of J from H
Turbine Model Apparent power, Inertia
Time
S (V A)
Constant (1/s)
GE 1.5SLE
1 500 000
4.9
4.1.2
Rated speed,
ω (rad/s)
1.9
Rotational Inertia,
J (kg − m2 )
4 290 000
Turbine Mechanical Model Development
Though essential, the mathematical model of the mechanical system can extend far
beyond the maximum power output curve. Other factors that are commonly considered
are turbine inertia, dynamic responses of the turbine/gearbox system (accounting for shaft
elasticity, gear box inertia, etc), and tower shadow effects. For the purposes of this project,
only the inertia of the turbine and general gearbox efficiency were included.
Turbine inertia is commonly expressed as the inertia time constant H which is defined
as
H=
Jω 2
S
(4.4)
where J is the rotational mechanical inertia of the turbine, ω is the mechanical rotational
speed, and S is the apparent rated power of the system. Though not technically a per-unit
value (H has units of
1
s
instead of being unit-less) it is commonly used as such due to the
normalization of dividing by S. Note also that H is not purely a function of the inertia
but actually changes in value as the turbine changes speed. More technically, H is similar
to the amount of the energy in the rotating system which is related to the inertia of the
turbine [12].
These factors are used to calculate what is called the natural time constant of the
turbine, defined below, with the results being shown in table 4.2.
τ0 =
2
1 Jωrated
3 Prated
(4.5)
Based on the work of [13], the actual time constant of the system is also a function of
wind speed, defined below.
11
Table 4.2: Natural Time Constant τ0 Calculations
Turbine Model Rated power, P (W )
GE 1.5SLE
Rated speed, ω (rad/s)
1 500 000
1.9
τ = τ0
vrated
v
Natural
Time
Constant, τ0 (s)
3.3
(4.6)
Using this function and the current wind speed, a low-pass filter with a dynamic cut-off
frequency was used to simulate the effects of the turbine’s inertia. The filter was applied
to the recorded wind speed, removing the fast-changing, high-frequency components of the
wind speed to which the turbine could not respond. It is this filtered wind speed that
is used as the input to the optimal power curve developed in section 4.1.1 to determine
the reference power that the emulator will attempt to track. Modeling of the gearbox
efficiency was done simply through a multiplication factor which was nominally chosen to
be one (100% efficient).
4.2
Emulator Design
4.2.1
Software Simulation
To provide effective emulation of the mechanical turbine characteristics, the previously
discussed (section 4.1) mechanical model components were implemented in software, specifically, LabVIEW. (LabVIEW is a real-time data acquisition and control environment with
simple interfaces to external hardware.) The goal of the software simulation is to calculate a
target power output taking into account the recorded wind speed, the calculated maximum
power curve, the turbine model, and any real-time values to complete these calculations.
In this case, those necessary values were the DC motor’s torque and speed. A general view
of the system block diagram can be seen in Figure 4.5.
A diagram of the data-flow for the turbine simulation is shown in Figure 4.6. The simulation starts with reading in recorded wind speed data provided by the National Renewable
Energy Lab from an observation tower of 120m in height. This data is used as the input to
12
Recorded
windspeed
playback
Wind
speed
Wind turbine
software
simulation
DC Motor
Controller
Target
power point
Dynamometer
Controller
DC Motor
Control Signal
DC Motor
Control
Electronics
DC
Motor
LabVIEW
Output
Dynamometer
Mechanical
coupling
Dynamometer
Control Signal
Torque
measurement
Speed
measurement
LabVIEW
Input
Torque and
speed
measurements
LabVIEW
Figure 4.5: Turbine Block Diagram of the Entire Wind Emulation System
a look-up table which produces a target power point. To account for the turbine’s inertia,
a low-pass filter (LPF) is applied to this target power point, the cut-off frequency of which
is determined using the time constant found for the turbine based on its inertia and the
current wind speed (see section 4.1.2). This filtered power signal is the target power point
that is then used as the reference to control the motor.
File
Selection
Gearbox
efficiency
selection
File
playback
start time
Optimal power
curve function
Recorded wind
speed file parser
Optimal
power point
Wind speed
Inertia model
(LPF) and
gearbox model
Target
power point
Figure 4.6: Turbine Model Block Diagram
4.2.2
DC Motor And Dynamometer Control
The calculated target power point (provided by the turbine simulation) is the central
piece of data that is used by the DC motor and dynamometer controllers. In concert, these
two pieces of equipment need to be controlled in such a way as to, as closely as possible,
13
produce the target amount of power as the wind speed dictates. Obviously, for any given
target power point there are a large number of torque and speed combinations that will
yield a valid result. Based on current literature ([3], [8]), the common “division of labor”
between the turbine control and generator control is to allow the generator to regulate
the shaft speed and the turbine to regulate the torque. This technique was applied when
developing the controllers for each unit.
The controllers were implemented using time-domain functions (rather than frequency
domain transfer functions) due to their ease of implementation in LabVIEW. A basic PID
controller was implemented and the specific gain values were found by trial and error during
system development (more details found in chapter 6). The block diagram of the controller
used is shown in Figure (4.7). There were two small additions made to the standard
PID control structure: an addition of an input limiter to the integrator block to prevent
integrator saturation and the second was a smoothing filter on the output of the derivative
function. To account for the inertia effects of the turbine, a similar low-pass filter was
placed on the output of the controller block to limit the rate at which the controller could
request the system to respond.
Speed
measurement
Torque
error
Target
power
point
Target torque
calculation
Proportional
Operator
Integral
Operator
Target
torque
Actual torque
calculation
Actual
power
point
+
-
LPF Dynamic
Cut-Off
Frequency
+
+
+
DC motor
control signal
Derivative
Operator
Turbine
Inertia
Model
(LPF)
Filtered
DC motor
control signal
Actual
torque
Gains
Figure 4.7: DC Motor Controller Block Diagram
The GE modeling document [6] provided several key details on the general control
strategy for their generator. Specifically, a function was provided that defined the target
14
generator shaft speed when the power output is less than 46%. At power levels above this
point, the generator runs at its rated speed of 1.2 pu. Additionally, GE implements a
low-pass filter with a time constant of sixty seconds on the output of this function. This
filter will provide a very slow moving response to changes in wind speed and will result
in significant “missed opportunities” to more efficiently extract more power from the wind
but provides stability and lower mechanical stress on the system as a whole. Note that this
control scheme requires the current wind speed as an input; much research is being done
to find good maximum power-point tracking when reliable wind speed data is unavailable
([18, 19, 20, 21, 22, 23, 24]).
The dynamometer controller is also simple PID controller with a low-pass filter on the
output to account for the turbine inertia. The specific gain values for the controller were
found through trial and error during the system development. The block diagram for the
dynamometer controller can be found in Figure 4.8.
Torque
measurement
Target
power
point
Target speed
calculation
(GE function)
Actual speed
calculation
Actual
power
point
Speed
error
+
-
LPF Dynamic
Cut-Off
Frequency
Proportional
Operator
Integral
Operator
Target
speed
+
+
+
Dynamometer
control signal
Derivative
Operator
Turbine
Inertia
Model
(LPF)
Filtered
dynamometer
control signal
Actual
speed
Gains
Figure 4.8: Dynamometer Controller Block Diagram
Note that the dynamometer controller and motor controller have no communication with
each other inside the software simulation. Ideally, the dynamometer would be replaced with
an actual DFIG which would have its own independent controller. The current emulator
architecture affords this easily. The only information that is passed between the turbine and
controller and dynamometer controller is the torque and speed which is “communicated”
15
through the common mechanical linkage.
4.2.3
Mechanical System
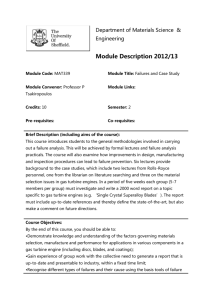
The physical set-up for the emulator consists of a DC motor used to emulate the mechanical power output of the turbine, an insulated-gate bipolar transistor (IGBT) chopper/inverter (and its controller) which drives the DC motor, a dynamometer to emulate
the mechanical loading that a generator would provide to the turbine, and high voltage
(∼200V) DC power supply. Both the DC motor and the dynamometer received a control signal from National Instruments analog input/output hardware that interfaced with
the LabVIEW software simulation (see following section). The control signal for the dynamometer came from this I/O hardware and was directly applied to a control input on the
dynamometer. The control signal was a varying voltage over a specified range that caused
the dynamometer to produce a load that was proportional to that signal.
The electronics to control the DC motor were more complicated. A voltage from the
I/O hardware (generated by the software simulation) was fed to a separate LabVolt IGBT
controller. This controller accepts an analog input voltage and produces three control
signals to be used on the three phase IGBT chopper/inverter. The controller has a variety
of modes that determine the form of those output voltages but for this purpose, we needed
only a single-phase pulse-width modulated (PWM) signal. By applying a high input voltage
(∼200VDC) on the input of the IGBT chopper/inverter, the signals from the controller
modulate this fixed higher voltage down to a lower voltage of an arbitrary value. This
modulated DC voltage is then fed to the DC motor. The DC motor and the dynamometer
were attached through a belt provided by LabVolt for this purpose. A block diagram of
the mechanical system is shown in Figure 4.9 and a photograph of the set-up is shown in
Figure 4.10.
16
High
Voltage DC
Supply
Control signals
from software
simulation
Analog
voltage
LabVIEW Output
Hardware
IGBT Chopper/
Inverter
Controller
PWM control
signal
IGBT
Chopper/
Inverter
Analog
voltage
Dynamometer
Mechanical
coupling (belt)
DC
Motor
Figure 4.9: Block Diagram of Mechanical System
Figure 4.10: Photograph of Mechanical System
17
PWM DC
Voltage
CHAPTER 5
EXPERIMENTS
The emulator was test in its ability to operate at the calculated target power point
under a variety of wind conditions. The National Renewable Energy Lab (NREL) was
able to provide three recorded wind speed files from a 120m tall wind measurement site in
Colorado. Each file characterizes three separate wind conditions: high-speed winds, lowspeed winds, and turbulent winds. These files were set-up to be read-in by the emulator
and used to calculate the target power point, which then drove the controllers’ behavior.
Plots of these wind profiles can be seen in Figures 5.1 and 5.2.
The rated speed for the GE wind-turbine being emulated is 15 m/s. Wind speeds above
this value produce a constant power output from the wind turbine as the turbine blades
are actively being controlled to capture less than 100% of the energy available in the wind.
Since wind speeds above this rated value are of concern mainly to the blade pitch controller,
and this emulator assumes perfect blade pitch control, the emulator operates in a constant
state when the wind speed exceeds the rated value. Because the wind speeds recorded in
the high-wind-speed file are entirely above the rated wind speed, this file was not run on
the emulator. The low-speed and varying-speed files were run, each being 800 s in length
(approximately 13 minutes).
GE explicitly states in their control document that the provided model is not appropriate for start-up and shutdown conditions. This had two implications when running the
data. First, at the start of each run of the emulator, a thirty second initialization period
was allowed for the settling out of any transients before the error calculation was started.
Secondly, deviations of the recorded wind speed outside the operating range of the turbine
(3 m/s to 25 m/s) were ignored. Visual indication on the emulator control panel indicates
when the turbine is operating outside its real-world range but these have no impact on the
operation of the emulator itself.
18
Figure 5.1: Low Wind Speed Data vs. Time
Figure 5.2: Varying Wind Speed Data vs. Time
19
To measure the effectiveness of the emulator, an error signal was defined as the difference
between the theoretical maximum power at a given wind-speed and the actual power output
of the emulator at the moment. This error signal was then used to calculate the mean
square error (MSE) on a rolling, real-time basis with the value at the conclusion of the run
representing the total MSE for that run. The MSE is defined as
M SE =
E2
n
(5.1)
where E is the error signal defined above and n is the number of data points over which
an error is calculated. MSE is then, as the name implies, a measurement of average error
over a given dataset where larger deviation in error are weighted more heavily.
20
CHAPTER 6
RESULTS
Most of the effort during the experimentation was made in adjusting the weighting for
the PID controllers for the DC motor (turbine emulation) and dynamometer (generator
emulation). More emphasis was put into the DC motor controller as it is a permanent
fixture of the emulator and the dynamometer is a stand-in until a fully-functional DFIG
can be used. This being said, the turbine and the generator are mechanically coupled
and both work together to produce optimal power generation; it is not possible to entirely
neglect the dynamometer controller and expect the emulator as a whole to work.
Listed in table 6.1 are a few of the runs that were made using each of the datasets,
along with the controller weights used, the MSE calculated for the run, and any relevant
comments on stability. Figures 6.1 and 6.2 show examples of how the system responded
during typical portions of the low-speed and varying-speed runs under nominal but nonoptimized controller weights. Note that the number values listed for the weights are not
the total gain for that path but rather a relative value between the proportional, integral,
and derivative components of the controller.
Generally speaking, the MSE values for the low-speed run were very low and much of
this can be attributed to the relatively slow changes in wind-speed for this data set. The
varying-speed runs benefited from the wind-speed frequently crossing-into and maintaining
a speed above the rated wind speed for a sustained period of time. When the wind-speed
is above this threshold the power output of the system is constant at the maximum rating
providing a fixed target that serves to damp out the system by saturating the outputs.
The wind speed is above the rating value for approximately half of the time during the
varying-speed runs.
Runs a and b both show that integrator wind-up was a significant issue for this controller. Figure 6.3 is a screen capture from a varying-speed run showing how the dy21
Figure 6.1: Typical Response of System Under Nominal Controller Weights to Low-Speed
Wind Profile
Figure 6.2: Typical Response of System Under Nominal Controller Weights to VaryingSpeed Wind Profile
22
Table 6.1: Turbine Emulation with Varying Controller Weights and Wind Profiles
“*” denotes identical weighting for a low- and varying-speed run.
Run
a*
b*
c
d
Wind
Speed
varying
low
low
low
Motor Weights
P
I
D
1.2 0.25 0
1.2 0.25 0
2 0.20 0
1 0.05 0
Dyna. Weights
P
I
D
0.75 0.10 0
0.75 0.10 0
0.50 0.05 0
0.50 0.05 0
e*
f*
g
h
i*
low
varying
low
low
low
3
3
3
4
3
0.01
0.01
0.01
0.01
0.01
0
0
10
10
10
3
3
3
3
2
0
0
0
0
0
0
0
10
10
10
j*
k
l*
m*
n
vary
low
low
varying
-
3
3
3
3
1.5
0.01
0.05
0.02
0.02
0.02
10
10
20
20
0
2
2
2
2
0.5
0
0
0
0
0
10
10
20
20
0
MSE
3.044e-1
7.646e-3
6.480e-3
Comments
Dyna. integrator wind-up
Dyna. integrator wind-up
Incomplete run, unstable
Strong oscillations driven
by motor I weight
1.544e-4
5.030e-3
9.343e-5
Incomplete run, unstable
6.018e-5 Slight, occasional oscillations
3.046e-3
Incomplete run, unstable
5.544e-5
2.730e-3
Incomplete run, weights
used in Figures 6.1 and 6.2
namometer integrator has wound up and has become the dominant controller component,
limiting the response of the system. Figure 6.4 shows the effect of setting the dynamometer
integrator weight to zero mid-run and the immediate effect it has on the system.
Run c shows that once the dynamometer integrator weight was reduced to prevent this
wind-up from having such a significant effect, the controller became unstable. Runs e and
f have the first set of weights in this table that produced a viable controller. Run g added
a derivative term and runs i and j lowered the dynamometer “P” rating; both changes
improved performance. Finally, runs l and m have the weights that produced the best
performance though there is no reason to believe that further experimentation would be
able to produce even better results.
It was also noticed during the course of multi-hour experimental sessions that there
appeared to be parameter drift in the system as it warmed up. For example, run m was
done at the end of the day after the system had been in use for several hours. Run n was
23
Figure 6.3: Response of System while Dynamometer Integrator is Wound-Up
Figure 6.4: Response of System to Setting Dynamometer Integrator Weight to Zero
24
done at the beginning of the day and the weights for the controller were altered to their
shown values after the weights from run m produced an unstable system. No attempt was
made to quantify the severity of the parameter drift from a “cold” to “warmed-up” system.
25
CHAPTER 7
CONCLUSIONS
Based on the results of the development and experimentation thus far, the emulator in
its current state provides reasonable emulation of a wind turbine power output and can be
used for development of generator control strategies. The system has been demonstrated
to track the changes in power based on the wind speed and shows the inertial effects of the
turbine which limit the system’s ability to respond quickly to changes in wind speed.
The most significant limitation in using the emulator as a stand-in for a GE 1.5MW
wind turbine is the sixty-second time constant on the function defining the target speed
for the dynamometer (generator). Presently, the calculated reference speed found by the
dynamometer is filtered by design with a very high time constant (sixty seconds). This
slowly changing reference limits the ability of the system to track the change in optimal
power very precisely. Furthermore, the filter as currently implemented is not functioning
properly and its cut-off frequency is much higher than it should be. If the filter were
working correctly, the system would respond even more slowly to changes in wind speed
and produce even an even larger MSE for the varying-speed runs.
For wind conditions where the wind speed changes rapidly, the inability of the system to
respond well is a limiting factor. During these conditions, the speed at which the generator
chooses to run and the rate at which it attempts to track the changing wind speed will play
a significant role in how closely the system as a whole is able to track the moving optimal
power point. It is assumed that GE chose a sixty second time constant as a compromise
between chasing a fluctuating optimal power point and the additional mechanical stress on
the system as well as the complexity of a more responsive controller and energy used by
the turbine to attempt to follow the optimal power point.
Since other aspects of the model were neglected (one-mass model instead of two- or
three-mass) it is not possible to tell whether system inertia and/or generator speed tracking
26
would be the dominant factors for all wind turbines. It is clear, though, that the limitations
these factors imposed on the system were significant and limited the range of control weights
that could be chosen while still maintaining a relatively stable system.
It was discovered early in the process of finding good weights for the controllers that
a typical failing of a classic PID controller was a significant issue: integrator saturation
and/or wind-up. Since the integrator function of the PID is constantly accumulating the
system error in an effort to force the controller to respond to small errors that persist over
time, it acts as if it has a long memory. This can cause problems as a large but temporary
error is not forgotten or neglected by the integrator and causes its output to skew heavily in
one direction for a long period of time, even past the point where such a skew is beneficial.
Similarly, if conditions exist where a small error persists over a long period of time (such as
an actuator at its mechanical limit or other control weights dominating the response of the
system), the integrator will accumulate this error and its output will attempt to correct
all of this error even if the conditions that originated in the error have passed. If it is not
possible to keep the error signal into the integrator at a low value, the integrator can easily
come to have a significant negative impact on the overall control effectiveness.
The problem with integrator wind-up was seen in running both data files and as can
be seen in the data above (table 6.1, runs a and b)and the control weights with the lowest
MSE were those where the integrator was removed from the control strategy by settings
its weight to zero. There are known strategies for dealing with integrator saturation and
wind-up but most of them require a more complex analysis of the system and thus were
beyond the scope of this project. One strategy, though, was employed with some success
and that was limiting the input of the error signal into the integrator to a very small range,
say 10% of its actual value. This prevents the integrator from being saturated by large
transient errors but doesn’t address the issue of wind-up.
In addition to the integrator input limitation, the derivative block also was slightly
modified from the strict PID model to help accomplish better control. The derivative block
27
uses a point-by-point derivative using the two latest input points and the time between them
to find the necessary slope. For reasons that are not clear, there are times, though, that
the input signal does not change from point-to-point even though the signal as a whole is
experiencing rapid change. This would lead to alternating derivative calculations oscillating
between zero and a relatively high value. To clean rapid oscillation, a first-order smoothing
filter was added on the output of the derivative block.
The effects of parameter drift were not quantified in this work and their impact on
the validity of the controller weights is equally difficult to quantify. As was mentioned
earlier, it is clear that the weights used with the best results under a “warmed-up” system
can produce less optimal results and even instability when used on a “cold” system. The
impact of this effect will be highly dependent on the length of time that the emulator
is used during each experimental session. Given the other limitations of the emulator at
present (see details in chapter 8), the impact it has on the validity of the specific weight
values found in this work is not a major issue.
28
CHAPTER 8
FUTURE WORK
The turbine emulator designed and implemented here was able to accomplish basic
turbine emulation in a sufficient manner though there is much room for improvement.
Before looking at improvements in specific areas of the emulator, there is one significant
next step that would legitimize this emulator as a useful development tool: validating the
emulator against real-world data from a GE 1.5MW wind turbine. If a set of power output
and wind speed versus time data could be obtained for the GE turbine being emulated
here it would prove invaluable in determining how valid this existing emulator is and what
efforts could be made to develop it to the point of being a good representation of the
real system. If a validated emulator could be implemented, it would allow for significant
research opportunities in many areas including optimal power point tracking and generator
speed selection during fluctuating wind speeds.
8.1
Programming/Simulation
The DC motor controller was implemented with time domain functions due to ease
of implementation and possible hardware limitations. Moving both the turbine model
and the controller to frequency domain functions would provide greater flexibility as most
controls engineers are more comfortable working with frequency domain transfer functions.
The feasibility of this change may hinge on the acquisition of new LabVIEW hardware
to support the real-time environment. Additional expertise in LabVIEW programming
would also be an asset in implementing the frequency-domain conversion and/or real-time
environment.
Also due to limited expertise in LabView programming, the generator speed-tracking
filter was designed by GE to be set at 60 s but currently the filter appears to effectively
operate at 10 s. This difference in filter cut-off frequency is significant and will have a
significant impact on the systems response to changing wind conditions and will necessitate
29
the use of new controller weights.
Integrator wind-up and/or saturation resulted in a lower performing controller as compared to those where the integrator weight was set to zero. An intelligent and effective
means to counter-act these common problems with the integrator could result in improved
control during periods of semi-steady-state operation (close to constant wind-speed).
The procedure to read in the recorded wind-speed data is currently very limited, expecting a series of carriage-return delimited values with the spacing between data points
assumed to be 50 ms. A more robust procedure could handle two-column data (time-stamp
and wind-speed) which would allow for a greater variety of recorded data without having
to adjust the programming directly.
8.2
Modeling
Integration of the effects of a pitch controller on power output when the wind speed is
greater than the rated wind speed would provide more realistic conditions for the emulator,
particularly for high wind speed situations. As the emulator functions right now these
conditions produce a static state at maximum power.
The mechanical model for the turbine at present is limited and offers much room for
improvement. There is a great deal of literature that provide more realistic mechanical
models including items such as shaft/gear-box elasticity and gear-box moment of inertia.
The effect of these additional mechanical parameters would provide greater model accuracy
during transient conditions such as large changes in wind-speed or fault-conditions.
8.3
Emulator Hardware
The LabVolt DC power supply used is an unregulated supply with significant droop
under loading. Using another IGBT and IGBT controller it would be possible to make a
regulated supply. The benefits from creating a regulated supply are probably minimal in
this application but maybe more important once an actual generator is used in the turbine
emulator (instead of a dynamometer).
The current limitations of the IGBT chopper significantly limit the overall mechanical
30
power output of the motor. At rated voltage, the DC motor draws six amperes while
the IGBT chopper is only capable of providing three. Larger IGBTs are inexpensively
and readily available and a basic chopper circuit which would serve the necessary purpose
does not require an involved design process. Upgrading the existing or constructing a new
IGBT chopper with a higher current rating would allow the system to operate over more
of its range. Additionally, the low efficiency of the DC motor (∼60%) places an additional
limitation on the actual mechanical power that is able to be produced.
31
REFERENCES
32
[1] U. S. D. of Energy. Office of Energy Efficiency, R. Energy, and N. R. E. L. (U.S.),
Wind Power in America’s Future: 20 % Wind Energy by 2030. Mineola, New York:
Dover Publications, Jan 2010.
[2] W.-T. Huang and W.-C. Yang;, “System steady-state analysis of a low-voltage microgrid with various distributed energy resources,” IEEE Conference on Cybernetics and
Intelligent Systems (CIS), 2010, pp. 237 – 242, 2010.
[3] K. Han and G. zhu Chen, “A novel control strategy of wind turbine mppt implementation for direct-drive pmsg wind generation imitation platform,” IEEE 6th International
Power Electronics and Motion Control Conference, 2009, pp. 2255–2259, 2009.
[4] L. Pao and K. Johnson, “A tutorial on the dynamics and control of wind turbines and
wind farms,” American Control Conference, 2009, pp. 2076–2089, 2009.
[5] W. Li, D. Xu, W. Zhang, and H. Ma, “Research on wind turbine emulation based on
dc motor,” IEEE Conference on Industrial Electronics and Applications, 2007., pp.
2589–2593, 2007.
[6] K. Clark, N. W. Miller, and J. J. Sanchez-Gasca, “Modeling of ge wind turbinegenerators for grid studies,” GE Energy, Tech. Rep., Sep 2009.
[7] L. Lopes, J. Lhuilier, A. mukherjee, and M. Khokhar, “A wind turbine emulator that
represents the dynamics of the wind turbine rotor and drive train,” IEEE 36th Power
Electronics Specialists Conference, 2005, pp. 2092–2097, 2005.
[8] M. Chinchilla, S. Arnaltes, and J. Rodriguez-Amenedo, “Laboratory set-up for wind
turbine emulation,” IEEE International Conference onIndustrial Technology, 2004.,
vol. 1, pp. 553– 557, 2004.
[9] G. Raina, O. Malik, and A. Kumar, “Wind oscillatory and gusting torque effect on a
power system,” IEEE Transactions on Aerospace and Electronic Systems, vol. AES-21,
no. 6, pp. 767–776, 1985.
[10] B. Rabelo, W. Hofmann, and M. Gluck, “Emulation of the static and dynamic behaviour of a wind-turbine with a dc-machine drive,” IEEE 35th Annual Power Electronics Specialists Conference, 2004., vol. 3, pp. 2107– 2112 Vol.3, 2004.
[11] J. Slootweg, S. D. Haan, H. Polinder, and W. Kling, “General model for representing
variable-speed wind turbines in power system dynamics simulations,” IEEE Power
Engineering Review, vol. 22, no. 11, pp. 56–56, 2002.
[12] J. Morren, J. Pierik, and S. D. Haan, “Inertial response of variable speed wind turbines,” Electric Power Systems Research, vol. 76, no. 11, pp. 980–987, 2006.
[13] C. Tang, M. Pathmanathan, W. Soong, and N. Ertugrul, “Effects of inertia on dynamic performance of wind turbines,” Australasian Universities Power Engineering
Conference, 2008., pp. 1–6, 2008.
33
[14] M. Arifujjaman, M. Iqbal, and J. Quaicoe, “Maximum power extraction from a small
wind turbine emulator using a dc - dc converter controlled by a microcontroller,”
International Conference on Electrical and Computer Engineering, 2006., pp. 213–
216, 2006.
[15] H. Kojabadi, L. Chang, and T. Boutot, “Development of a novel wind turbine simulator for wind energy conversion systems using an inverter-controlled induction motor,”
IEEE Transactions on Energy Conversion, vol. 19, no. 3, pp. 547– 552, 2004.
[16] B. Gong and D. Xu, “Real time wind turbine simulator for wind energy conversion
system,” IEEE Power Electronics Specialists Conference, 2008., pp. 1110–1114, 2008.
[17] W. Sikwete and P. Barendse, “Wind turbine emulator,” Master’s thesis, University of
Capetown, Jan 2008.
[18] S. Diaz, C. Silva, J. Juliet, and H. Miranda, “Indirect sensorless speed control of a pmsg
for wind application,” IEEE International Electric Machines and Drives Conference,
2009., pp. 1844 – 1850, 2009.
[19] J. Hui, A. Bakhshai, and P. K. Jain, “A master-slave fuzzy logic control scheme for
maximum power point tracking in wind energy systems,” 32nd International Telecommunications Energy Conference, pp. 1 – 6, 2010.
[20] J. Brahmi, L. Krichen, and A. Ouali, “Sensorless control of pmsg in wecs using artificial
neural network,” 6th International Multi-Conference on Systems, Signals and Devices,
2009., pp. 1 – 8, 2009.
[21] B. Shen, B. Mwinyiwiwa, Y. Zhang, and B.-T. Ooi;, “Sensorless maximum power point
tracking of wind by dfig using rotor position phase lock loop (pll),” IEEE Transactions
on Power Electronics, vol. 24, no. 4, pp. 942 – 951, 2009.
[22] M. Cirrincione and M. Pucci, “Sensors-less neural mppt control of wind generators with
induction machines,” Industrial Electronics, 2009. IECON ’09. 35th Annual Conference of IEEE, pp. 818 – 824, 2009.
[23] X. Zheng, L. Li, D. Xu, and J. Platts, “Sliding mode mppt control of variable speed
wind power system,” Power and Energy Engineering Conference, 2009. APPEEC
2009. Asia-Pacific, pp. 1 – 4, 2009.
[24] J. Thongam, P. Bouchard, H. Ezzaidi, and M. Ouhrouche, “Wind speed sensorless
maximum power point tracking control of variable speed wind energy conversion systems,” Electric Machines and Drives Conference, 2009. IEMDC ’09. IEEE International, pp. 1832–1837, 2009.
34