www.ijecs.in International Journal Of Engineering And Computer Science ISSN:2319-7242
advertisement

www.ijecs.in
International Journal Of Engineering And Computer Science ISSN:2319-7242
Volume 3 Issue 12 December 2014, Page No. 9462-9475
Reliability Analysis of unreliable M X/G/1 Retrial Queue with Second
Optional Service, Setup and Discouragement
Madhu Jain* and Deepa Chauhan**
*Department of Mathematics, Indian Institute of Technology, Roorkee-247667
**Department of Mathematics, Allenhouse Institute of Technology, Kanpur-208007
ABSTRACT
Retrial queues have been widely used to model many problems arising in telephone switching systems, telecommun ication
networks, computer networks and computer systems, etc.. In this paper an M x/G/1 retrial queue with two phase services,
discouragement and general setup time is being studied where the server is subject to breakdown during service. Primary
customers join the system according to Poisson process and receive the service immediately if the server is available upon arrival.
Otherwise, they enter a retrial orbit with some probability and are queued in the orbit. They repeat their demand after some
random interval of t ime. The customers are allowed to balk upon arrival. All the customers who join the queue have to undergo
the first essential service, whereas only some of them demand for the second optional service. Using generating function approach
and supplementary variable method, the steady state solutions for some queueing and relia bility measures of the system are
obtained. The sensitivity analysis has been carried out to explo re the effects of system parameters on various performance
measures.
Keywords: Retrial queue, Batch arrivals, Two phase service, Unreliable server, Balking, Setup time, Supplementary variable,
Generating function, Reliability.
INTRODUCTION
Retrial queueing system is characterized by the feature that the arriving customers who find the server busy join the retrial
queue (orbit) to try again for their requests in random order and at random interval or leave the service area immediately. During
last two decades considerable attention has paid to the analysis of queueing systems with repeate d calls or customers. A single
server retrial queueing system in wh ich each customer has discrete service time has considered by Wu and Ke (2007). The time
dependent system size probabilities have been studied by Parthasarathy and Sudesh (2007) for a retrial queue by employing
continued functions. Amar (2009) derived an explicit formu la for the generating function of the number of the customers in orbit
for M x/ G/ 1 retrial queue and exhibited exp licit forms of stochastic decomposition property.
The queueing systems with second optional service are characterized by the feature that all arrivals demand the first essential
service, whereas some of them require second optional service wh ich can also be provided by the same server. Stability conditions
and steady state analysis were investigated by Dimitrion and Langaris (2010) for a rep airable queueing model with two phase
service and retrial customers.
The study of a queueing model with unreliable server is an important interdisciplinary topic in queueing theory and reliability
theory, as it considers not only the queueing characteris tics for the system but also reliability indices for the server. An M/G/ 1
Madhu Jain, IJECS Volume 3 Issue 12 December, 2014 Page No.9462-9475
Page 9462
retrial queueing system with disasters and unreliable server was investigated by Wang et al. (2007). A discrete time Geo/G/ 1
retrial queue has been studied by Wang and Zhao (2007) wh ere the server provides two types of services and also subject to
breakdowns. Multi server retrial queue with the Batch Markovian Arrival Process (BMAP) was considered by Kim et al. (2007).
Wang and Zhang (2009) analy zed a discrete time single server retrial queue with geometrical arrival for both positive and
negative customers in wh ich the server is subject o breakdowns and repairs.
The study of reliability indices for unreliable server queueing system has been done by many researchers. By using
supplementary variable technique some queueing and reliability characteristics of the M x/(G1 ,G2 )/1 retrial queueing system h ave
been derived by Ke and Chang (2009).
The customers are said to be impatient if they tend to join the queue only when a short wait is expected and tend to
remain in line if the wait has been sufficiently s mall. When queue length is sufficiently long or due to some other reason, t he
arriving customers would not like to join the queue; this behavior of customers is known as balking. Operating characteristics of
an M [x]/G/ 1 queueing system under a variant vacation policy, where the server leaves for a vacation as soon as the system is empty
was studied by Ke (2007).
The retrial queue with second optional service, balking, server failures, rep airs and setup is the subject of investigation in
the present study. The rest of paper structured as follo ws. The model under investigation is described along with notations and
assumptions in section 2. In section 3, we establish the steady state equatio ns after introducing supplementary variables
corresponding to elapsed service time, setup time and repair time. Section 4 provides mathemat ical analysis to obtain joint
probabilit ies and marg inal p robabilities. So me queueing performance indices are d iscuss ed in section 5. Sect ion 6 is devoted to the
reliability indices of the server. Some particular cases are deduced in section 7. The sensitivity analysis in order to valid ate the
analytical results is given in section 8. Conclusions are outlined in the final section 9.
2. MODEL DESCRIPTION
M x/ G/1 retrial queueing system with unreliable server, balking, setup and second optional service is considered by making the
following assumptions:
The customers arrive at the system according to a co mpound Poisson process with random batch size.
If an arriving customer finds the server idle, he may obtain service immediately. There is a single unreliab le server who
provides two kinds of general heterogeneous services to the customers on a first come first served (FCFS) bas is.
The first essential service is needed to all arriving customers; the essential service time has general distribution. As soon
as the essential service of a customer is completed, he may opt for second optional service with probability r or else with
probability (1-r), leaves the system.
The arriv ing customer on finding the server under busy, setup or broken down state must leave the service area and
repeats its demand with rate θ after some random interval of time. The inter arrival time and retrial times of batches are
exponentially distributed.
The server may breakdown while servicing the customers. We assume that the life time of the server is exponentially
distributed with rate α 1 and α2 in case when he is rendering first essential service and second optional service,
respectively.
When the server breaks down, it is sent for repair. The repair time distributions for both service phases are arbitrarily
distributed with rate 1 and 2 .
The customers may balk fro m retrial queue with different balking rates on finding the server in busy, setup or broken
down states due to impatience.
The server is recovered after the co mpletion of the repair and starts service of the customers immed iately.
NOTATIONS
Madhu Jain, IJECS Volume 3 Issue 12 December, 2014 Page No.9462-9475
Page 9463
Mean arrival rate of the customers
X
Random variab le denoting the batch size
ai
Pr[X=i]
X(z)
Generating function for batch size X, i.e. X ( z )
ak z k
k 1
θ
Mean retrial rate of the customers
hPi , hS i , hRi
Joining probability of the customers fro m retrial queue when the server is busy, in setup and under
repair state while rendering ith phase (i=1,2) service
αi (i=1,2)
Mean failu re rate of the server in ith phase service
i , θ i , i
Serv ice rate, setup rate and repair rate (i=1,2)
i (x), θ i (y), i (y)
Hazard service rate, setup rate and repair rate
wi (x), s i (y), b i (y)
Probability density functions for service time, setup time and repair time in case of ith phase (i=1,2)
service
W i (x), Si (x), Bi (x)
Distribution functions for ith (i=1,2) phase of service time, setup time and repair time
Qn (t)
Probability that there are n customers in the retrial queue at time t when the server is in id le state
Pn(1) (t , x)
Probability that there are n customers in the retrial queue at time t when the server is busy with first
essential service and elapsed service time lies in (x, x+d x)
S n(1) (t , x, y )
Probability that there are n customers in the retrial queue at time t when the server is in setup state for
first essential service and the elapsed service time for the customer under service is equal to x, and
elapsed setup time lies in (y, y+dy)
Rn(1) (t , x, y )
Probability that there are n customers in the retrial queue at time t when the server is in repair state
while broken down during first essential service and the elapsed service time fo r the customer under
service is equal to x, and elapsed repair time lies in (y, y +dy)
Pn( 2) (t )
Probability that there are n customers in the retrial queue at time t when the server is busy in second
optional service
S n( 2) (t , y )
Probability that there are n customers in the retrial queue at time t when the server is in setup state , for
second optional service and elapsed setup time lies in (y, y+dy)
R n( 2) (t , y )
Probability that there are n customers in the retrial queue at time t when the server is broken down
while rendering the second optional service and elapsed repair time lies in (y, y +dy)
The hazard rates are given by:
i ( x)dx
dWi ( x)
dSi ( y )
dBi ( y)
, i 1,2
; i ( y)dy
; i ( y)dy
1 S i ( y)
1 Bi ( y)
1 Wi ( x)
3. GOVERNING EQUATIONS
We construct below the partial differential equations governing the model for the system state ‘n’ (n≥0) by assuming the
elapsed service time, elapsed setup time and the elapsed repair time as supplementary variables:
d
(2)
n Qn (t ) 2 P0 (t ) (1 r )
dt
0
P0(1) (t , x)1 ( x)dx
Madhu Jain, IJECS Volume 3 Issue 12 December, 2014 Page No.9462-9475
(1)
Page 9464
n
(1)
1 ( x) hP1 1 Pn(1) (t , x) h P1 a k Pn(1)k ( x)
Rn (t , x, y ) 1 ( y )dy, n 1
0
t
x
k 1
(2)
n
1 ( y ) hS1 S n(1) (t , x, y ) hS1
a k S n(1)k (t , x, y ), n 1
t
k 1
(3)
n
1 ( y ) h R1 Rn(1) (t , x, y ) h R1
a k Rn(1)k (t , x, y ), n 1
t y
k 1
(4)
n
( 2)
d
( 2)
a k Pn(2k) (t )
Rn (t , y ) 2 ( y )dy r Pn(1) (t , x) 1 ( x)dx, n 1 (5)
2 h P2 2 Pn (t ) h P2
0
0
dt
k 1
n
2 ( y ) hS2 S n( 2) (t , y ) hS 2
a k S n( 2)k (t , y ), n 1
t
k 1
2 ( y ) hR2 Rn( 2) (t , y ) hR2
t y
(6)
n
a R
k
( 2)
nk ( y ),
n 1
(7)
k 1
The following boundary conditions are taken into consideration
Pn(1) (t ,0) 2 Pn(21) (t ) (1 r ) Pn(1)1 (t , x) 1 ( x)dx (n 1) Qn1 (t ), n 1
0
P0(1) (t ,0) 2 P1( 2) (t ) (1 r )
0
P1(1) (t , x) 1 ( x)dx
(8)
n
a k Qnk (t )
(9)
k 1
S n(1) (t , x,0) 1 Pn(1) (t , x), n 1
(10)
S n( 2) (t ,0) 2 Pn( 2) (t ),
(11)
n 1
Rn(1) ( x,0) S n(1) ( x, y )1 ( y )dy,
0
Rn( 2) (0) S n( 2) ( y ) 2 ( y )dy,
n 1
(12)
n 1
0
(13)
For steady state equations, we define the probabilit ies as follows:
Qn lim t 0 Qn (t ), Pn(1) ( x) lim t 0 Pn(1) (t , x), Pn(2) lim t 0 Pn(2) (t ),
Rn(1) ( x, y) lim t 0 Rn(1) (t , x, y), Rn(2) ( y) lim t 0 Rn(2) (t , y)
The steady state equations for the system state ‘n’ corresponding to equations. (1)- (7) are g iven by
n Qn 2 P0(2) (1 r )0
P0(1) ( x) 1 ( x)dx
(14)
n
(1)
(1)
a k Pn(1)k ( x)
Rn ( x, y ) 1 ( y )dy, n 1
1 ( x) h P1 1 Pn ( x) h P1
0
x
k 1
(15)
n
1 ( y ) hS1 S n(1) ( x, y ) hS1
a k S n(1)k ( x, y ), n 1
k 1
(16)
n
1 ( y ) h R1 Rn(1) ( x, y ) h R1 a k R n(1)k ( x, y ), n 1
y
i 1
2 hP
2
2 Pn( 2) hP2
n
a k Pn(2k) 0
k 1
Rn( 2) ( y ) 2 ( y )dx r
(17)
0
Pn(1) ( x) 1 ( x)dx, n 1
Madhu Jain, IJECS Volume 3 Issue 12 December, 2014 Page No.9462-9475
(18)
Page 9465
n
2 ( y ) h S 2
( 2)
a i S n( 2)k ( y ), n 1
S n ( y ) h S 2
k 1
(19)
2 ( y ) h R2
y
n
( 2)
R n ( y ) h R2
a k R n( 2)k ( y ), n 1
k 1
(20)
Under steady state, the boundary conditions are
Pn(1) (0) 2 Pn(21) (1 r ) Pn(1)1 ( x) 1 ( x)dx (n 1) Qn1 , n 1
(21)
0
P0(1) (0) 2 P1( 2) (1 r )
0
P1(1) ( x) 1 ( x)dx
n
a k Qnk ,
n 1
(22)
k 1
S n(1) ( x,0) 1 Pn(1) ( x), n 1
(23)
S n( 2) (0) 2 Pn( 2) , n 1
(24)
Rn(1) ( x,0) S n(1) ( x, y )1 ( y )dy, n 1
(25)
0
Rn( 2) (0) S n( 2) ( y ) 2 ( y )dy, n 1
(26)
0
4. THE ANALYSIS
In order to provide the analytic solution, the following probability generating functions are defined as follows:
X ( z)
k 1
a k z k , Pn(1) ( x, z )
S n( 2) ( y, z )
n 0
n 0
Pn(1) ( x ) z n , Pn( 2) ( z )
S n( 2) ( y ) z n , Rn(1) ( x, y, z )
n 0
Pn( 2) z n , S n(1) ( x, y, z )
S n(1) ( x, y) z n ,
n 0
n 0
Rn(1) ( x, y ) z n , Rn( 2) ( y, z )
R
( 2)
n
n ( y) z
n 0
Multiplying equations (14)-(26) by appropriate power of zn and summing over n
n Qn ( z ) 2 P0(2) ( z ) (1 r )0
P0(1) ( x, z ) 1 ( x)dx, n 0
1 ( x) hP1 1 Pn(1) ( x, z ) hP1 X ( z ) Pn(1) ( x, z )
x
0
(27)
Rn(1) ( x, y, z )1 ( y)dy, n 1
1 ( y) hS1 S n(1) ( x, y, z ) hS1 X ( z )S n(1) ( x, y, z ), n 1
(28)
(29)
1
1 ( y ) h R1 R n(1) ( x, y, z ) h R1 X ( z ) R n(1) ( x, y, z ), n 1
y
2 hP
2
(30)
0
0
2 Pn( 2) ( z ) hP2 X ( z ) Pn( 2) Rn( 2) ( y, z ) 2 ( y )dy r Pn(1) ( x, z ) 1 ( x)dx, n 1
(31)
2 ( y) hS21 S n(2) ( y, z ) hS2 X ( z )S n(2) ( y, z ), n 1
(32)
2 ( y ) hR2
y
(33)
( 2)
Rn ( y, z ) hR2 X ( z ) Rn( 2) ( y, z ), n 1
The boundary conditions yield
Madhu Jain, IJECS Volume 3 Issue 12 December, 2014 Page No.9462-9475
Page 9466
Pn(1) ( z ) 2 Pn(2) ( z ) z 1 (1 r ) z 1 P1(1) ( x, z ) 1 ( x)dx X ( z )Qn ( z ) (n 1) z 1Qn ( z )
0
(1 r ) z 1 P0(1) ( x, z )1 ( x)dx 2 z 1 P0(2) ( z ),
0
(34)
n 1
S n(1) ( x,0, z ) 1 Pn(1) ( x, z ), n 1
(35)
S n( 2) (0, z ) 2 Pn( 2) ( z ), n 1
(36)
Rn(1) ( x,0, z ) S n(1) ( x, y, z )1 ( y )dy, n 1
0
Rn( 2) (0, z ) S n( 2) ( y ) 2 ( y, z )dy, n 1
(37)
0
(38)
Theorem 1: The partial probability generating functions when the server is in busy state, under setup state and in repair state
respectively, are given by
Pn(1) ( x, z ) Pn(1) (0, z ) e 1 ( z ) x W1 ( x)
Pn( 2) ( z )
(39)
rw * 1 ( z ) (1)
Pn ( z )
2 1 ( z )
S n(1) ( x, y, z) 1 Pn(1) ( x, z) e
S n(2) ( y, z) 2 Pn(2) ( z) e
(40)
hS1 (1 X ( z )) y
hS2 (1 X ( z )) y
(41)
S1 ( y)
(42)
S 2 ( y)
Rn(1) ( x, y, z) 1 Pn(1) ( x, z) s * (hs1 (1 X ( z)) ye
Rn(2) ( y, z) 2 Pn(2) ( z ) s * (hs2 (1 X ( z )) ye
hR1 (1 X ( z )) y
hR2 (1 X ( z )) y
B1 ( y)
B2 ( y)
(43)
(44)
where Wi ( x) 1 Wi ( x) , S i ( y) 1 S i ( y) and Bi ( y) 1 Bi ( y) , i=1,2.
Proof: For p roof see appendix A-I.
Theorem 2: The marg inal generating functions are obtained as
1 w * 1 ( z ) (1)
Pn(1) ( z )
Pn (0, z )
1 ( z )
(45)
rw * 1 ( z ) (1)
Pn( 2) ( z )
Pn (0, z )
2 2 ( z)
(46)
1 w * 1 ( z )
S n(1) ( z ) 1
1 ( z )
1 s * (hs (1 X ( z )) y}
(1)
1
Pn (0, z )
hs1 (1 X ( z ))
(47)
*
rw * 1 ( z ) 1 s (hs2 (1 X ( z )) y} (1)
S n( 2) ( z ) 2
Pn (0, z )
hs2 (1 X ( z ))
2 2 ( z )
(48)
*
1 w * 1 ( z ) 1 b (hR1 (1 X ( z )) y} (1)
Rn(1) ( z ) 1 s *{hS1 (1 X ( z )) y}
Pn (0, z )
hR1 (1 X ( z ))
1 ( z )
(49)
*
rw * 1 ( z ) 1 b (hR2 (1 X ( z )) y} (1)
X ( z )) y}
Pn (0, z )
hR2 (1 X ( z ))
2 2 ( z )
(50)
Rn( 2) ( z ) 2 s *{hS2 (1
Proof: For proof see appendix A-II.
Madhu Jain, IJECS Volume 3 Issue 12 December, 2014 Page No.9462-9475
Page 9467
Theorem 3: The probability generating functions for the number of customers in the ret rial queue and in the system are
R( z )
[1 B hR2 hS2 A1 (X ( z ) )(1 w * 1 ( z ))( 2 2 ( z ))]Qn ( z )
1 ( z ) B
[rh R1 hS1 A2 w * 1 ( z )]Qn ( z )
1 ( z ) B
(51)
[1 B z hR2 hS2 A1 (X ( z ) )(1 w * 1 ( z ))( 2 2 ( z ))]Qn ( z )
L( z )
1 ( z ) B
[ zrh R1 hS1 A2 w * 1 ( z )]Qn ( z )
1 ( z ) B
(52)
where
Ai hRi hSi i hRi (1 S * (hsi (1 X ( z)) y}) i hSi (1 S * (hsi (1 X ( z)) y})(1 B* (hRi (1 X ( z)) y)
B hR1 hR2 hS1 hS2 (1 X ( z)) ( z w*1 ( z))( 2 2 ( z)) r2 ( z)w*1 ( z)
Proof: We use the marginal probabilit ies and the following relat ion to obtain R(z) and L(z)
R( z ) Qn ( z ) Pn(1) ( z ) Pn( 2) ( z ) S n(1) ( z ) S n( 2) ( z ) Rn(1) ( z ) Rn( 2) ( z )
L( z ) Qn ( z ) zPn(1) ( z ) zPn( 2) ( z ) zS n(1) ( z ) zS n( 2) ( z ) zR n(1) ( z ) zR n( 2) ( z )
Theorem 4: The expected number of customers in the retrial queue is
E[ L]
hR1 hR2 hS1 hS2
(1 r 2 E[ X ]E[W1 ])
E[W1 ](r ) r 2 (1 E[ B1 ]) {E[ X ( X 1)] 1E[ X ]hS1 }
{E 2 [ S1 ] E 2 [ B1 ]} 212 hR1 hS1 E 2 [ X ]E[ B1 ]E[ S 2 ]
(53)
where hP1 1hS1 E[ S1 ] 1hr1 E[ B1 ]
The expected number of customers in the system is
E[ R] E[ L]
hR1 hR2 hS1 hS2 E[W1 ](r 2 )
(54)
2 E[ X ] {(1 r 2 E[W1 ]E[W1 ])E[ X ]}
Proof: The expressions for the expected customers in the retrial queue and in the system are obtained by using
E[ L]
L( z )
z
E[ R]
and
z 1
R( z )
z
where L(z) and R(z) are g iven in equations (51) and (52).
z 1
5. PERFORMANCE MEASURES
Theorem 5: The probability that the server is in idle, busy with ith (i=1,2) phase of service, setup and under repair, respectively
are given by
PB1
2
1 ( 2 r1 )
2
i 1
(1 i i )
i
(55)
PB2
i
r1
1 ( 2 r1 )
2
(1 ii
i 1
i)
i
(56)
Madhu Jain, IJECS Volume 3 Issue 12 December, 2014 Page No.9462-9475
Page 9468
PS1
PS2
PR1
PR2
1 2
(57)
2
1 1 ( 2 r1 ) (1 i i )
i i
i 1
r 2 1
(58)
2
2 1 ( 2 r1 ) (1 i i )
i i
i 1
1 2
(59)
2
1 1 ( 2 r1 ) (1 i i )
i i
i 1
r 2 1
(60)
2
2 1 ( 2 r1 ) (1 i i )
i i
i 1
where
E[ X ]
.
( 2 r 2 )1 2 1
Proof: For proof see appendix A-III.
6. RELIAB ILITY INDICES
In order to analyze reliability indices, we consider setup and breakdown states as absorbing states. By using the same notations as
in the previous section, we can get the following set of equations:
d
(2)
n Qn (t ) 2 P0 (t ) (1 r )
dt
0
P0(1) (t , x)1 ( x)dx
(61)
n
1 ( x) h P1 1 Pn(1) (t , x) h P1
a i Pn(1)k ( x), n 1
t x
k 1
(62)
n
d
( 2)
a k Pn(2k) (t ) r Pn(1) (t , x) 1 ( x)dx, n 1
2 h P2 2 Pn (t ) h P2
0
dt
k 1
(63)
The boundary conditions are:
Pn(1) (t ,0) 2 Pn(21) (t ) (1 r ) Pn(1)1 (t , x) 1 ( x)dx (n 1) Qn1 (t ), n 1
(64)
0
P0(1) (t ,0) 2 P1( 2) (t ) (1 r )
0
P1(1) (t , x) 1 ( x)dx
n
a k Qnk (t )
(65)
k 1
Taking Lap lace transform, we get
s n Q *n (s) 1 2 P *(02) (s) (1 r )0
P *(01) ( x, s) 1 ( x)dx
n
P *(n1) ( s, x) s 1 ( x) h P1 1 P *(n1) ( s, x) h P1
a k P *(n1) k ( s, x)
x
k 1
(66)
(67)
P *(n1) ( s, x) 1 ( x)dx
(68)
Now the boundary conditions yield
s 2 hP
2
2 P *(n2) ( s ) h P2
n
a k P *(n2)k (s) r 0
k 1
P *(n1) ( s,0) 2 P *(n2)1 ( s) (1 r ) P *(n1)1 ( s, x) 1 ( x)dx (n 1) Q *n1 ( s)
0
(69)
The probability generating functions in the form of Laplace transformation can be written as
Madhu Jain, IJECS Volume 3 Issue 12 December, 2014 Page No.9462-9475
Page 9469
Qn* ( s, z )
Qn* (s) z n
n 0
Pn*(1) ( s, x, z )
Pn*(1) (s, x) z n ,
n 0
Pn*(1) ( s,0, z )
Pn*(1) (s,0) z n
n 0
Pn*( 2) ( s, z )
Pn*(2) (s) z n
n 0
Multiplying equations (66)-(65) by suitable powers of z and summing, we get
Q * ( s)
1
(70)
s X ( z s )
1 w * a1 ( s, z ) *(1)
Pn*(1) ( s, x, z )
Pn ( s,0, z )
a1 ( s, z )
(71)
rw * a1 ( s, z ) *(1)
Pn*( 2) ( s, z )
Pn ( s,0, z )
a 2 ( s, z ) 2
(72)
where
ai ( s, z ) s i hPi hPi X ( z ), i 1,2
*
a 2 2 1 X ( z ) s
Pn*(1) ( s,0, z )
Qn ( s)
a 2 2 z w * a1 ( s, z ) ra1 ( s, z ) w * a1 ( s, z )
Let zs be the root of equation
ra1 ( s, z )
x w * a1 ( s, z )1
.
a
2 ( s, z ) 2
Now we derive some reliability indices as follows:
(i) The availability of the server under steady state is
A
n 0
Qn
n 0
Pn(1) (1)dx
Pn(2) (1)dx
n 0
1 ( 2 r1 )
1 ( 2 r1 )
2
1 ii
i 1
(73)
i
i
(ii) The failu re frequency of the server under steady state can be obtained as
f
(1)
( 2)
1 Pn ( x)dx 2 Pn ( x)dx
n 0
0
0
lim z 1 1 Pn(1) ( x, z )dx 2 Pn( 2) ( z )dx
0
0
(1 2 2 1 )
2
1 ( 2 r1 ) 1 i i
i
i
i 1
(74)
(iii) The mean time to failure is given by
MTTF R(t )dt [ R * ( s)]s 0
0
(1 w * (1 ))( 2 2 ) r1w * (1 )
Q * (0) (1 )Q * (0)
( 2 2 )(1 w * (1 )) r1w * (1 )
(75)
7. SENSITIVITY ANALYSIS
Madhu Jain, IJECS Volume 3 Issue 12 December, 2014 Page No.9462-9475
Page 9470
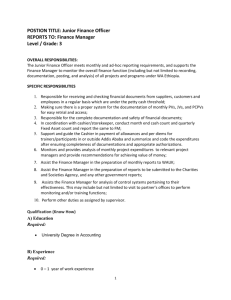
The graphical presentations of E[R] and E[L] have been done in figures 1-6. For nu merical results summarized in tables 1-4,
we set default parameters as
We have plotted the graphs in figs 1-6 for different service time distributions, namely (a) M/ E4 /1 (b) M/D/1 (c) M/γ/1.
Figures 1-4 depict the variation in the expected number of customers in the retrial queue E[R] and in the system E[L] for both
homogeneous and heterogeneous failure rates by continuous and discrete curves, respectively, for d ifferen t values of repair rates
and different sets for balking probabilit ies, respectively by varying the arrival rate λ. The balking parameters (i.e. join in g
probability) chosen for different sets are as follows:
Set I: h P 1 = h P2 =0.7, hs1=h s2 =0.8, h R1 =h R2 =0.9
Set II: h P1 = h P2 =0.3, hs 1 =hs2 =0.4, h R1 =h R2 =0.6
Set III: h P 1 = hP2 =0.1, hs 1 =hs2 =0.3, h R1 =h R2 =0.4
Set IV: h P 1 = hP 2 =1, hs 1 =hs 2 =1, h R1 =h R2 =1
Fro m figures 1-6, it can be seen that E[R] and E[L] increase first gradually and then significantly with the in crease in
arrival rate λ. The expected number of customers in the retrial queue E[R] and in the system queue E[L] increase almost linea rly
for lower values of arrival rates and then a sharp increment can be found. It can be noticed in figures 1 (a -c) and 2 (a-c) that E[L]
and E[R] both increase with the increment in the failure rates. There is noteworthy effect of repair rates on E[R] and E[L] a s can
be seen in figures 3(a-c) and 4(a-c); as we increase the repair rate, the expected number of customers in th e retrial queue E[R] and
in the system queue E[L] demonstrate the decreasing trends. A notable increasing effect of joining probabilit ies on E[R] and E[L]
can be noticed from figures 5 (a -c) and 6 (a-c).
In all figs, we see that E[R] and E[L] are higher fo r heterogeneous arrival rates in co mparison to homogeneous arrival
rates. The increasing (decreasing) pattern of E[R] and E[L] for increasing values of arrival rate, failure rate, repair rate and join ing
probabilit ies tally with physical experiences. For heavy traffic, the effects are more prominent which is same as we expect for the
real t ime system.
8. CONCLUDING REMARKS
In this work, we have studied balking aspects while predicting the performance of unreliable M x/ G/1 queueing systems
with second optional service. By using the supplementary variable method, we have modeled the system as a Markov chain and
obtained stationary queueing and reliability measures of interest.
Batch arrival queueing model with retrials has potential applicability in many real world congestion situations. In our
investigations we have incorporated the server breakdown which is an unavoidable phenomenon for any queueing systems.
Moreover, the optional services and retrial attempts considered can be realized in queuein g models while modeling many pract ical
applications related to computer sciences, commun ication, production, human - co mputer interactions and so on. The incorporation
of more realistic assumptions namely (i) bulk arrival (ii) retrial attempts (iii) unrelia b le server (iv) balking, altogether make our
model mo re versatile and robust than previous models. The numerical illustrations given provide an insight regarding
computational tractability of the analytical results established for the concerned model.
APPENDIX
A-I: Proof of theorem 1:
Solution of eq. (29) gives
S n(1) ( x, y, z) 1S n(1) ( x,0, z) e
hS1 (1 X ( z )) y
S1 ( y)
(A.1)
By using (35) in (29), we get
Madhu Jain, IJECS Volume 3 Issue 12 December, 2014 Page No.9462-9475
Page 9471
S n(1) ( x, y, z) 1Pn(1) ( x, z) e
hS1 (1 X ( z )) y
(A.2)
S1 ( y)
Similarly fro m equations (32) and (40)
S n(2) ( y, z) 2 Pn(2) ( z) e
hS2 (1 X ( z )) y
(A.3)
S 2 ( y)
Equations (30) and (33) g ive
Rn(1) ( x, y, z) Rn(1) ( x,0, z)e
Rn(2) ( y, z) Rn(2) (0, z)e
hR1 (1 X ( z )) y
hR21 (1 X ( z )) y
(A.4)
B1 ( y)
(A.5)
B2 ( y)
Fro m equations (37), (A.1) and (A.4), we obtain
Rn(1) ( x, y, z) 1 Pn(1) ( x, z) s * (hs1 (1 X ( z)) ye
where
e
h Si (1 X ( z )) y
hR1 (1 X ( z )) y
B1 ( y)
(A.6)
ds i ( y ) S i* (hSi (1 X ( z ))) .
0
Fro m equations (A.3), (A.4) and (38), we have
Rn(2) ( y, z) 2 Pn(2) ( z) s * (hs2 (1 X ( z)) ye
hR21 (1 X ( z )) y
B2 ( y)
(A.7)
By using equations (28) in (A.7), we get
Pn(1) ( x, z ) Pn(1) (0, z ) e 1( z ) x W1 ( x)
(A.8)
A-II: Proof of t heorem 2:
Equations (31), (A.7) and (A.8) give
rw * 1 ( z ) (1)
Pn( 2) ( z )
Pn (0, z )
2 2 ( z)
(A.9)
Integrating equation (A.8) by parts, we get
1 w * 1 ( z ) (1)
Pn(1) ( z )
Pn (0, z )
1 ( z )
(A.10)
Again fro m equation (A.1) and (A.9), we get
*
1 w * 1 ( z ) 1 S (hs1 (1 X ( z )) y} (1)
S n(1) ( z ) 1
Pn (0, z )
hs1 (1 X ( z ))
1 ( z )
(A.11)
On integrating equation (A.3) by parts and using equation (A.9), we obtain
*
rw * 1 ( z ) 1 S (hs2 (1 X ( z )) y} (1)
S n( 2) ( z ) 2
Pn (0, z )
hs2 (1 X ( z ))
2 2 ( z )
(A.12)
Now fro m equations (A.7) and (A.9), we get
*
1 w * 1 ( z ) 1 B (hR1 (1 X ( z )) y} (1)
Rn(1) ( z ) 1 S *{hS1 (1 X ( z )) y}
Pn (0, z )
hR1 (1 X ( z ))
1 ( z )
(A.13)
*
rw * 1 ( z ) 1 B (hR2 (1 X ( z )) y} (1)
Rn( 2) ( z ) 2 S *{hS2 (1 X ( z )) y}
Pn (0, z )
hR2 (1 X ( z ))
2 2 ( z )
(A.14)
A-III Proof of theorem 4:
To obtain required probabilities, we use
Madhu Jain, IJECS Volume 3 Issue 12 December, 2014 Page No.9462-9475
Page 9472
PBi lim z1 Pn(i) ( z), i 1,2
(A.15)
PSi lim z1 S n(i) ( z), i 1,2
(A.16)
PRi lim z1 Rn(i) ( z), i 1,2
(A.17)
REFERENCES
1.
Amar, A. (2009). An M x/ G/ 1 energetic retrial queue with vacation and its control. Electronics notes in theoretical
computer science, 253 (3), 33-44.
2.
Dimit riou, I. and Langaris, C. (2010). A reparable queueing model with two phase service start-up times and retrial
customers. Co mp. Oper. Res., 37 (7), 181-1190.
3.
Ke, J.C. (2007). Operating characteristics analysis of the M x/G/1 system with variant vacation policy and balking. Appl.
Math. Model., 31, 1321-1337.
4.
Ke, J.C. and Chang, F.M . (2009). M x/ G1 ,G2 /1 retrial queue under Bernoulli vacation schedules with general repeated
attempts and starting failures. Appl. Math Model., 33 (7), 3186-3196.
5.
Kim, C., Klimenok, V.I. and Orlovsky, D.S. (2007). A BMAP/PH/ N retrial queue with Markovian flow of breakdowns.
Euro. J. Oper. Res., 189 (3), 1057-1072.
6.
Parthasarathy, P.R. and Sudesh, R. (2007). Time dependent analysis of a single server retrial queue with state dependent
rates. Oper. Res. Lett., 35, 601-611.
7.
Wang, J., Liu, B. and Li, J. (2007). Transient analysis of an M/G/1 retrial queue subject to disasters and server failures.
Euro. J. Oper. Res., 189 (3), 1118-1132.
8.
Wang, J. and Zhang, P. (2009). A discrete time retrial queue with negative customers and unreliable server. Co mp. Ind.
Eng., 56 (4), 1216-1222.
9.
Wang, J. and Zhao, Q. (2007). A discrete time Geo/ G/1 retrial queue with starting failures and second optional service.
Co mp. Math. App., 53, 115-127.
90
80
70
60
50
40
30
20
10
0
120.8
120.5
10.9,20.7
10.3,20.7
0.5
0.6
0.7
0.8
E[L]
E[R]
10. Wu, X. and Ke, X. (2007). Analysis of an M/Dn/1 retrial queue. Co mp. App. Math., 200, 528-536.
0.9
1
90
80
70
60
50
40
30
20
10
0
120.8
120.5
10.9,20.7
10.3,20.7
0.5
0.6
(a)
0.7
0.8
0.9
1
(a)
Madhu Jain, IJECS Volume 3 Issue 12 December, 2014 Page No.9462-9475
Page 9473
70
60
E[R]
40
120.8
60
120.8
120.5
50
120.5
10.9,20.7
40
10.9,20.7
E[L]
50
10.3,20.7
30
20
10.3,20.7
30
20
10
10
0
0
0.5
0.6
0.7
0.8
0.9
0.5
1
0.6
0.7
120.8
120.5
100
120.5
80
10.9,20.7
10.3,20.7
10.9,20.7
10.3,20.7
60
40
20
0
0.6
0.7
0.8
0.9
0.5
1
0.6
0.7
(c)
60
E[L]
122
124
12,23
15,23
30
20
10
0
0.5
0.6
0.7
0.8
0.9
90
80
70
60
50
40
30
20
10
0
122
124
12,23
15,23
0.5
1
0.6
0.7
(a)
0.6
0.7
0.8
E[L]
0.9
1
90
80
70
60
50
40
30
20
10
0
1
0.9
1
122
124
12,23
15,23
0.5
0.6
(b)
0.9
(a)
122
124
12,23
15,23
0.5
0.8
80
70
60
50
40
30
20
10
0
1
Fig 2: E[L] vs λ for (a) M/E4 /1
(b) M/D/1 (c) M/γ/1
70
40
0.9
(c)
Fig 1: E[R] vs λ for (a) M/E4 /1
(b) M/D/1 (c) M/γ/1
50
0.8
E[R]
1
120
120.8
0.5
E[R]
0.9
(b)
E[L]
E[R]
(b)
100
90
80
70
60
50
40
30
20
10
0
0.8
0.7
0.8
(b)
Madhu Jain, IJECS Volume 3 Issue 12 December, 2014 Page No.9462-9475
Page 9474
80
50
122
124
12,23
15,23
E[R]
30
122
124
12,23
15,23
60
E[L]
40
40
20
20
10
0
0
0.5
0.6
0.7
0.8
0.9
0.5
1
0.6
0.7
0.9
1
(c)
(c)
Fig 3: E[R] vs λ for (a) M/E4 /1
(b) M/D/1 (c) M/γ/1
Fig 4: E[L] vs λ for (a) M/E4 /1
(b) M/D/1 (c) M/γ/1
50
50
set I
set III
30
40
set II
set IV
E[L]
40
E[R]
0.8
20
10
set I
set III
30
set II
set IV
20
10
0
0
0.5
0.6
0.7
0.8
0.9
1
0.5
0.6
0.7
0.8
0.9
1
(a)
(a)
50
50
set I
set III
30
set II
set IV
40
E[L]
E[R]
40
20
10
set I
set III
30
set II
set IV
20
10
0
0
0.5
0.6
0.7
0.8
0.9
0.5
1
0.6
0.7
0.8
(b)
1
(b)
70
70
60
50
set I
set II
set III
set IV
60
50
40
E[L]
E[R]
0.9
30
40
set I
set III
set II
set IV
30
20
20
10
10
0
0
0.5
0.6
0.7
0.8
0.9
1
0.5 0.6 0.7 0.8
(c)
Fig 5: E[R] vs λ for (a) M/E4 /1
0.9
1
(c)
Fig 6: E[L] vs λ for (a) M/E4 /1
Madhu Jain, IJECS Volume 3 Issue 12 December, 2014 Page No.9462-9475
Page 9475
(b) M/D/1 (c) M/γ/1
(b) M/D/1 (c) M/γ/1
Madhu Jain, IJECS Volume 3 Issue 12 December, 2014 Page No.9462-9475
Page 9476