Document 11908976
advertisement

IV. Neural Network Learning
10/25/09
1
A.
Neural Network Learning
10/25/09
2
Supervised Learning
• Produce desired outputs for training inputs
• Generalize reasonably & appropriately to
other inputs
• Good example: pattern recognition
• Feedforward multilayer networks
10/25/09
3
input
layer
10/25/09
hidden
layers
. . .
. . .
. . .
. . .
. . .
. . .
Feedforward Network
output
layer
4
Typical Artificial Neuron
connection
weights
inputs
output
threshold
10/25/09
5
Typical Artificial Neuron
linear
combination
activation
function
net input
(local field)
10/25/09
6
Equations
n
hi = ∑ w ij s j − θ
j=1
h = Ws − θ
Net input:
Neuron output:
€
10/25/09
s′i = σ ( hi )
s′ = σ (h)
7
10/25/09
. . .
. . .
Single-Layer Perceptron
8
Variables
x1
w1
xj
Σ
wj
h
Θ
y
wn
xn
10/25/09
θ
9
Single Layer Perceptron
Equations
Binary threshold activation function :
1, if h > 0
σ ( h ) = Θ( h ) =
0, if h ≤ 0
€
1,
Hence, y =
0,
1,
=
0,
10/25/09
€
if ∑ w j x j > θ
j
otherwise
if w ⋅ x > θ
if w ⋅ x ≤ θ
10
€
2D Weight Vector
w2
w ⋅ x = w x cos φ
v
cos φ =
x
+
w
w⋅ x = w v
φ
€
€
€
x
–
w⋅ x > θ
⇔ w v >θ
⇔v >θ w
10/25/09
v
w1
θ
w
11
N-Dimensional Weight Vector
+
w
normal
vector
separating
hyperplane
–
10/25/09
12
Goal of Perceptron Learning
• Suppose we have training patterns x1, x2,
…, xP with corresponding desired outputs
y1, y2, …, yP • where xp ∈ {0, 1}n, yp ∈ {0, 1}
• We want to find w, θ such that
yp = Θ(w⋅xp – θ) for p = 1, …, P 10/25/09
13
Treating Threshold as Weight
n
h = ∑ w j x j − θ
j=1
x1
n
= −θ + ∑ w j x j
w1
xj
j=1
Σ
wj
wn
xn
10/25/09
h
Θ
y
€
θ
14
Treating Threshold as Weight
n
h = ∑ w j x j − θ
j=1
x0 = –1
x1
n
= −θ + ∑ w j x j
θ = w0
w1
xj
Σ
wj
wn
xn
j=1
h
Θ
y
€
Let x 0 = −1 and w 0 = θ
n
n
˜ ⋅ x˜
h = w 0 x 0 + ∑ w j x j =∑ w j x j = w
j=1
10/25/09
€
j= 0
15
Augmented Vectors
θ
w1
˜ =
w
wn
−1
p
x
1
p
x˜ =
p
xn
p
˜
˜
We want y = Θ( w ⋅ x ), p = 1,…,P
p
€
10/25/09
€
16
Reformulation as Positive
Examples
We have positive (y p = 1) and negative (y p = 0) examples
˜ ⋅ x˜ p > 0 for positive, w
˜ ⋅ x˜ p ≤ 0 for negative
Want w
€
€
€
€
Let z p = x˜ p for positive, z p = −x˜ p for negative
˜ ⋅ z p ≥ 0, for p = 1,…,P
Want w
Hyperplane through origin with all z p on one side
10/25/09
17
Adjustment of Weight Vector
z5
z1
z9
z1011
z z6
z2
z3
z8
z4
z7
10/25/09
18
Outline of
Perceptron Learning Algorithm
1. initialize weight vector randomly
2. until all patterns classified correctly, do:
a) for p = 1, …, P do:
1) if zp classified correctly, do nothing
2) else adjust weight vector to be closer to correct
classification
10/25/09
19
Weight Adjustment
p
η
z
˜ ′′
p
w
ηz
z
˜′
w
p
˜
w
€ €
€
€
€
€
10/25/09
20
Improvement in Performance
˜ ⋅ z p < 0,
If w
˜ ′ ⋅ z = (w
˜ + ηz ) ⋅ z
w
p
p
p
p
p
p
˜
= w ⋅ z + ηz ⋅ z
€
p
˜ ⋅ z +η z
=w
p 2
˜ ⋅ zp
>w
10/25/09
€
21
Perceptron Learning Theorem
• If there is a set of weights that will solve the
problem,
• then the PLA will eventually find it
• (for a sufficiently small learning rate)
• Note: only applies if positive & negative
examples are linearly separable
10/25/09
22
NetLogo Simulation of
Perceptron Learning
Run Perceptron-Geometry.nlogo
10/25/09
23
Classification Power of
Multilayer Perceptrons
• Perceptrons can function as logic gates
• Therefore MLP can form intersections,
unions, differences of linearly-separable
regions
• Classes can be arbitrary hyperpolyhedra
• Minsky & Papert criticism of perceptrons
• No one succeeded in developing a MLP
learning algorithm
10/25/09
24
Hyperpolyhedral Classes
10/25/09
25
Credit Assignment Problem
input
layer
10/25/09
. . .
. . .
. . .
. . .
. . .
hidden
layers
. . .
. . .
How do we adjust the weights of the hidden layers?
Desired
output
output
layer
26
NetLogo Demonstration of
Back-Propagation Learning
Run Artificial Neural Net.nlogo
10/25/09
27
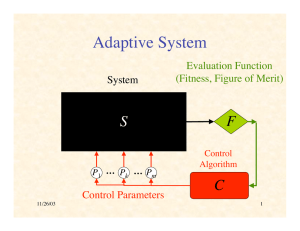
Adaptive System
System
Evaluation Function
(Fitness, Figure of Merit)
S
F
P1 … Pk … Pm
Control Parameters
10/25/09
Control
Algorithm
C
28
Gradient
∂F
measures how F is altered by variation of Pk
∂Pk
∂F
∂P1
∇F = ∂F ∂P
k
∂F
∂
P
m
€
∇F points in direction of maximum local increase in F
10/25/09
€
€
29
Gradient Ascent
on Fitness Surface
∇F
+
gradient ascent
10/25/09
–
30
Gradient Ascent
by Discrete Steps
∇F
+
–
10/25/09
31
Gradient Ascent is Local
But Not Shortest
+
–
10/25/09
32
Gradient Ascent Process
P˙ = η∇F (P)
Change in fitness :
m ∂F d P
m
dF
k
˙
F=
=∑
= ∑ (∇F ) k P˙k
k=1 ∂P d t
k=1
€d t
k
F˙ = ∇F ⋅ P˙
F˙ = ∇F ⋅ η∇F = η ∇F
€
€
2
≥0
Therefore gradient ascent increases fitness
(until reaches 0 gradient)
10/25/09
33
General Ascent in Fitness
Note that any adaptive process P( t ) will increase
fitness provided :
0 < F˙ = ∇F ⋅ P˙ = ∇F P˙ cosϕ
where ϕ is angle between ∇F and P˙
Hence we need cos ϕ > 0
€
or ϕ < 90
10/25/09
€
34
General Ascent
on Fitness Surface
+
∇F
–
10/25/09
35
Fitness as Minimum Error
Suppose for Q different inputs we have target outputs t1,…,t Q
Suppose for parameters P the corresponding actual outputs
€
are y1,…,y Q
Suppose D(t,y ) ∈ [0,∞) measures difference between
€
target & actual outputs
Let E q = D(t q ,y q ) be error on qth sample
€
€
Q
Q
Let F (P) = −∑ E q (P) = −∑ D[t q ,y q (P)]
q=1
10/25/09
q=1
36
Gradient of Fitness
q
∇F = ∇ −∑ E = −∑ ∇E q
q
q
q
€
∂E
∂
=
D(t q ,y q ) = ∑
∂Pk ∂Pk
j
€
€
∂D(t q ,y q ) ∂y qj
€
∂Pk
d D(t q ,y q ) ∂y q
=
⋅
q
dy
∂Pk
q
∂
y
= ∇ D t q ,y q ⋅
yq
10/25/09
∂y qj
(
)
∂Pk
37
Jacobian Matrix
q
∂y1q
∂
y
1
∂P1
∂Pm
Define Jacobian matrix J q =
q
∂y q
∂
y
n
n ∂P
∂
P
1
m
Note J q ∈ ℜ n×m and ∇D(t q ,y q ) ∈ ℜ n×1
€
Since (∇E q ) k
€
∴∇E = ( J
q
€
€
10/25/09
q
q
q
∂
D
t
,y
∂
y
(
)
∂E
j
=
=∑
,
q
∂Pk
∂Pk
∂y j
j
q T
)
q
∇D(t q ,y q )
38
€
€
Derivative of Squared Euclidean
Distance
Suppose D(t,y ) = t − y = ∑ ( t − y )
2
2
i
i
i
∂D(t − y ) ∂
∂ (t i − y i )
2
=
(t i − y i ) = ∑
∑
∂y j
∂y j i
∂y j
i
=
d( t j − y j )
dyj
d D(t,y )
∴
= 2( y − t )
dy
€
10/25/09
2
2
= −2( t j − y j )
39
Gradient of Error on qth Input
d D(t ,y ) ∂y
∂E
=
⋅
q
q
∂Pk
q
d yq
q
∂Pk
q
∂
y
= 2( y q − t q ) ⋅
∂Pk
q
∂
y
= 2∑ ( y qj − t qj ) j
j
∂Pk
∇E = 2( J
q
q T
)
q
q
y
−
t
(
)
€
10/25/09
€
40
Recap
P˙ = η∑ ( J ) (t − y )
q T
q
q
q
To know how to decrease the differences between
actual & desired outputs,
€
we need to know elements of Jacobian,
∂y qj
∂Pk ,
which says how jth output varies with kth parameter
(given the qth input)
The Jacobian depends on the specific form of the system,
in this case, a feedforward neural network
€
10/25/09
41
Multilayer Notation
xq
W1
s1
10/25/09
W2
s2
WL–2 WL–1
sL–1
yq
s L
42
Notation
•
•
•
•
•
•
•
L layers of neurons labeled 1, …, L Nl neurons in layer l sl = vector of outputs from neurons in layer l input layer s1 = xq (the input pattern)
output layer sL = yq (the actual output)
Wl = weights between layers l and l+1
Problem: find how outputs yiq vary with
weights Wjkl (l = 1, …, L–1)
10/25/09
43
Typical Neuron
s1l–1
Wi1l–1
l–1
W
ij
sjl–1
Σ
hil
σ
sil
WiNl–1
sNl–1
10/25/09
44
Error Back-Propagation
∂E q
We will compute
starting with last layer (l = L −1)
l
∂W ij
and working back to earlier layers (l = L − 2,…,1)
€
10/25/09
45
Delta Values
Convenient to break derivatives by chain rule :
∂E q
∂E q ∂hil
= l
l−1
∂W ij
∂hi ∂W ijl−1
q
∂
E
Let δil = l
∂h i
l
∂E q
∂
h
l
i
So
=
δ
i
∂W ijl−1
∂W ijl−1
€
10/25/09
46
Output-Layer Neuron
s1L–1
Wi1L–1
L–1
W
ij
sjL–1
Σ
hiL
σ
tiq
siL = yiq
WiNL–1
sNL–1
10/25/09
Eq
47
Output-Layer Derivatives (1)
q
∂
E
∂
L
L
q 2
δi = L = L ∑ ( sk − t k )
k
∂h i ∂h i
=
d( s − t
L
i
d hiL
q 2
i
)
L
d
s
= 2( siL − t iq ) iL
d hi
= 2( siL − t iq )σ ′( hiL )
10/25/09
€
48
Output-Layer Derivatives (2)
∂hiL
∂
L−1 L−1
L−1
=
W
s
=
s
ik
k
j
L−1
L−1 ∑
∂W ij
∂W ij k
€
∂E q
L L−1
∴
=
δ
i sj
L−1
∂W ij
where δiL = 2( siL − t iq )σ ′( hiL )
10/25/09
€
49
Hidden-Layer Neuron
s1l
s1l–1
W1il
Wi1l–1
l–1
W
ij
sjl–1
Σ
hil
σ
sil
Wkil
s1l+1
skl+1
Eq
WiNl–1
sNl–1
10/25/09
WNil
sNl
sNl+1
50
Hidden-Layer Derivatives (1)
l
∂E q
∂
h
l
i
Recall
=
δ
i
l−1
∂W ij
∂W ijl−1
q
q
l +1
l +1
∂
E
∂
E
∂
h
∂
h
δil = l = ∑ l +1 k l = ∑δkl +1 k l
∂h i
∂h i
∂h i
k ∂h k
k
€
€
€
l +1
k
l
i
∂h
=
∂h
m
∂hil
l
d
σ
h
(
∂W kil sil
i)
l
l
l
′
=
=
W
=
W
σ
h
(
ki
ki
i)
l
l
∂h i
d hi
∴ δil = ∑δkl +1W kilσ ′( hil ) = σ ′( hil )∑δkl +1W kil
k
10/25/09
€
∂ ∑ W kml sml
k
51
Hidden-Layer Derivatives (2)
l
i
l−1
ij
∂h
∂W
€
l−1 l−1
dW
∂
ij s j
l−1 l−1
l−1
=
W
s
=
=
s
ik
k
j
l−1 ∑
∂W ij k
dW ijl−1
∂E q
l l−1
∴
= δi s j
l−1
∂W ij
where δil = σ ′( hil )∑δkl +1W kil
k
10/25/09
€
52
Derivative of Sigmoid
Suppose s = σ ( h ) =
1
(logistic sigmoid)
1+ exp(−αh )
−1
−2
Dh s = Dh [1+ exp(−αh )] = −[1+ exp(−αh )] Dh (1+ e−αh )
€
= −(1+ e
−αh −2
) (−αe ) = α
−αh
e−αh
−αh 2
(1+ e )
1+ e−αh
1
e−αh
1
=α
= αs
−
−αh
−αh
−αh
−αh
1+ e 1+ e
1+
e
1+
e
= αs(1− s)
10/25/09
€
53
Summary of Back-Propagation
Algorithm
Output layer : δiL = 2αsiL (1− siL )( siL − t iq )
∂E q
L L−1
=
δ
i sj
L−1
∂W ij
Hidden layers : δil = αsil (1− sil )∑δkl +1W kil
k
€
∂E q
l l−1
=
δ
i sj
l−1
∂W ij
10/25/09
€
54
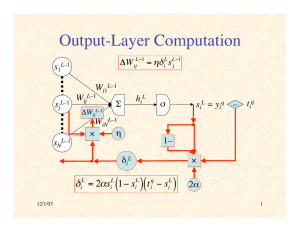
Output-Layer Computation
ΔW ijL−1 = ηδiL sL−1
j
s1L–1
Wi1L–1
L–1
W
ij
sjL–1 €
Σ
ΔWijL–1
sNL–1
10/25/09
WiNL–1
η
×
hiL
σ
siL = yiq – tiq
1–
δiL
×
δiL = 2αsiL (1− siL )( t iq − siL )
2α
55
Hidden-Layer Computation
ΔW ijl−1 = ηδil sl−1
j
s1l–1
W1il
l–1
Wi1
Wijl–1
sjl–1 €
sNl–1
ΔWijl–1
hil
Σ
WiNl–1
×
η
×
WNil
1–
δil
×
δil = αsil (1− sil )∑δkl +1W kil
10/25/09
sil
σ
k
Wkil
Σ
s1l+1
δ1l+1
skl+1
Eq
δkl+1
sNl+1
δNl+1
α
56
Training Procedures
• Batch Learning
– on each epoch (pass through all the training pairs),
– weight changes for all patterns accumulated
– weight matrices updated at end of epoch
– accurate computation of gradient
• Online Learning
– weight are updated after back-prop of each training pair
– usually randomize order for each epoch
– approximation of gradient
• Doesn’t make much difference
10/25/09
57
Summation of Error Surfaces
E
E1
E2
10/25/09
58
Gradient Computation
in Batch Learning
E
E1
E2
10/25/09
59
Gradient Computation
in Online Learning
E
E1
E2
10/25/09
60
Testing Generalization
Available
Data
Training
Data
Domain
Test
Data
10/25/09
61
Problem of Rote Learning
error
error on
test data
error on
training
data
epoch
stop training here
10/25/09
62
Improving Generalization
Training
Data
Available
Data
Domain
Test Data
Validation Data
10/25/09
63
A Few Random Tips
• Too few neurons and the ANN may not be able to
decrease the error enough
• Too many neurons can lead to rote learning
• Preprocess data to:
– standardize
– eliminate irrelevant information
– capture invariances
– keep relevant information
• If stuck in local min., restart with different random
weights
10/25/09
64
Run Example BP Learning
10/25/09
65
Beyond Back-Propagation
• Adaptive Learning Rate
• Adaptive Architecture
– Add/delete hidden neurons
– Add/delete hidden layers
• Radial Basis Function Networks
• Recurrent BP
• Etc., etc., etc.…
10/25/09
66
What is the Power of
Artificial Neural Networks?
• With respect to Turing machines?
• As function approximators?
10/25/09
67
Can ANNs Exceed the “Turing Limit”?
• There are many results, which depend sensitively on
assumptions; for example:
• Finite NNs with real-valued weights have super-Turing
power (Siegelmann & Sontag ‘94)
• Recurrent nets with Gaussian noise have sub-Turing power
(Maass & Sontag ‘99)
• Finite recurrent nets with real weights can recognize all
languages, and thus are super-Turing (Siegelmann ‘99)
• Stochastic nets with rational weights have super-Turing
power (but only P/POLY, BPP/log*) (Siegelmann ‘99)
• But computing classes of functions is not a very relevant
way to evaluate the capabilities of neural computation
10/25/09
68
A Universal Approximation Theorem
Suppose f is a continuous function on [0,1]
Suppose σ is a nonconstant, bounded,
monotone increasing real function on ℜ.
€
n
For any ε > 0, there is an m such that
∃a ∈ ℜ m , b ∈ ℜ n , W ∈ ℜ m×n such that if
€
n
F ( x1,…, x n ) = ∑ aiσ ∑W ij x j + b j
i=1
j=1
m
€
[i.e., F (x) = a ⋅ σ (Wx + b)]
€then F ( x ) − f ( x ) < ε for all x ∈ [0,1]
10/25/09
€
n
(see, e.g., Haykin, N.Nets 2/e, 208–9)
69
One Hidden Layer is Sufficient
• Conclusion: One hidden layer is sufficient
to approximate any continuous function
arbitrarily closely
1
b1
x1
xn
10/25/09
Σσ
Σσ
a1
a2
Σ
am
Wmn
Σσ
70
The Golden Rule of Neural Nets
Neural Networks are the
second-best way
to do everything!
10/25/09
IVB
71