DYNAMICS AND CONEROL by A. H. P. Smith
advertisement

DYNAMICS AND CONEROL OF NUCLEAR ROCKET !NGINICS
by
H. P. Smith
A. H. Stenning
Nuclear Engineering Department
Massachusetts Institute of Technology
Cambridge, Massachusetts
August, 1960
Final report on contract DSR 8246, performd for the Pratt
and Whitney Aircraft Division of the United Aircraft
Corporation
I
r~J
DYNAMICS AND CONTROL OF NUCLEAR
ROCKET EN11GNES
Page 24, line 2:
"H should be
"Po2 IO2
"Po2/vro
it
Page 26, 2 lines below
equation (3~12):
"a a"
Page 37, line 8:
"40 Pressure
should be
...
Page 43, equation (4-1):
"P *
Page 44, equation (4-2):
"G T "
x
I
"
ac ="
-
should be "H. Pressure
1 + P*"
x
should be "P
should be
"G IT
should be
"1G
integral sign for
i is
x 1+ P*x
"
j
2p
Page
45,9
equation (4-4):
Page 4.7, equation (4-6):
"G170"
n= fe
omitted
should be
n*(t)dt
0
Page
54,
line
4:
" p*t should be
Page 69, figure 11:
Page 85,
lines 1 & 3:
"from pole at ... " should be "from zero at 000"'
"a,"
Page 88, equation (4-48):
PC*
G
"p
should
be " -r
*
The equation should be
(9
-
*)dt
+
G
(G
-G*)
- 2 Page 89, line 13:
"The limit of Gi*..."
should be
"The limits of G*"
Page 113, lino 9t "as rapid a response as the
should be
..
The ... "
"as rapid a response as possible.
""" and "p'"
Page 141, equation (1-5) & (1..6):
"' Tp = " and " Tp
Page 141, 3rd line from bottom:
should be
= a
"'resigned" should be
"'designed"
"
Page 144, line 11:' "'O = 29.7 ...
Page 153, equation (11.17):
(1/2)(1.06)
should be
"oc = 29.7 ... "
should be
fsurface,
entrance) + T(surface,exiti
T(surface,
exit)
Page 165, line 12:- Between lines 11 and 12 inject,
"'to core inlet pressure"
DYNAMICS AND CONTROL OF NUCLAR ROCKET ENIE
by
1. P.-smith*
A. H. Stenning
ABSTRACT
The dynamics and control of a nuclear rocket engine with bleed turbine
or topping turbine pump drive is studied.
Throughout the thesis, the
attempt is made to retain a physical understanding of the mathematics and
to attain results which can be applied generally to present concepts of
nuclear rocket engines and which do not depend on a specific design.
In
accordance with this purpose, identification is made of the important
characteristics of each component, and its behavior is described by the
simplest possible model consistent with reasonable engineering accuracy.
A system of non-linear equations, based on a lumped parameter analysis is
derived to describe the dynamic performance of the engine.
A stability criterion for uncontrolled operation, formulated from
linear approximations of the dynamic equations, is derived.
that the engine is
stable to small perturbations if
cient of reactivity of the empty core is negative.
It
is shown
the temperature coeffiThe stability criterion
is not dependent upon the magnitude of positive reactivity feedback that
results from increase of hydrogen (propellant) density in the core.
A parameter is defined which measures the margin of stability.
A more
general and thereby more complex criterion of stability is presented.
An analysis of the transient response is made and is verified by analog
computer simzlation of the non-linear dynamics.
The system is remarkably
insensitive to changes of the major coefficients and is able to safely
A5 0 0C. Fellow, Department of Nuclear Engineering, M.I.T.
*Assistant Professor of Nuclear Engineering, M.I.T.
i
withstand large perturbations.
It
is shown that the asymptotic response
depends directly on the mechanical inertia of the turbopump and that
reduction of the thermal inertia of the core does not improve the response
The insensitivity and sluggishness is explained from physical considerations.
A feedback control system is proposed and found satisfactory by
analytic investigation and analog simlation.
The results of simlation
of controlled rapid transition from a low power level to full power operation is presented.
A successful method of startup is proposed and
investigated with the aid of an analog computer.
Response and methods of
The topping turbine system is
control at full power are presented.
favorably compared with the more common bleed turbine system.
ii
ACKNOWLEDGNENT
The work described below was carried out at M.I.T. under
the sponsorship and with the financial support of the Pratt
and Whitney Division of the United Aircraft Corporation.
The
authors would like to thank Mr. P. Bolan for his valuable
suggestions, Professor Elias Gyftopoulos for his advice, Professor
Henry Paynter for his assistance in the operation of the Analog
Computing Facility, and Mr. Yotaka Yoshitani for his assistance
in many phases of the analysis.
iii
TABLE OF CONTENTS
Page
IN1TRODUCTION . . . . . . . . . . . . . - - - -.
Section I:
.-
1
. . . . . . . . . . . . . . . .
1
A.
Nuclear Rocket Proposals
B.
A Comparison of Chemical and Nuclear Power for Rocket
Engines . . . . . . . . . . . . . . . . . . . .. . .
.
2
C.
Possible Dynamic Problems of Nuclear Rockets
. . . . . .
5
D.
Problems of Control . . . . . . . . . . . . . . . . . . .
6
E.
General Attack
. . . . . . . . . . . . . . . . . . . . .
8
Section II:
DESCRIPTION OF THE ROCKET . . . .....
.. .. ..
..
.
A.
Overall Design
. . . . . . . . . . . . . . . . . . . . .
11
B.
A Comparison of the Bleed Turbine and Topping Turbine
Systems . . . . . . . . . . . . . . . . . . . . . . . . .
11
C.
Component Description . . . . . . . . *. ..
Section III:
DERIVATION OF THE DYNAMIC EQUATIONS
. . ..
..
14
.
. . . . . . . .
17
A.
Lumped Parameter Analysis . . . . . . . . . . . . . . . .
17
B.
Fluid Inertia and Compressibility . . . . . . . . . . . .
17
C.
Neutron Kinetic and Precursor Eguations . . . . . . . . .
18
D.
Thermal Equation
. . . . . . . . . . . . . . . . . . . .
20
1.
Core Temperature Variation at Steady State
2.
Core Pressure Variation at Steady State
. . . . . .
22
3.
Expression of the Mass Rate of Flow as a Function
of the Core Inlet Stagnation Pressure and Maxiim
Surface Temperature . . . . . . . . . . . . . . . .
23
.
.
.
20
4. Formulation of the Time-Dependent Maximum Surface
Temperature as a Function of the Neutron Density
and Core Inlet Stagnation Pressure
E.
.
..
.
.
..
.
.
24
Reactivity Equation . . . . . . . . . . . . . . . . . . .
25
F. Temperature Control Equations . . . . . . . . . . . . . .
26
iv
Page
G.
Pressure Equation . . . . .
28
.
31
. . . .
34
. . . . . . . . . . . . . . .
37
Topping Turbine System with Control Valve in Front
.
. . . .
Pressure Control Equations
I.
Scaling of Equations
Section IV:
.
.
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
Topping Turbine System with Control Valve after
H.
D.
.
2.
the Turbine
C.
28
Bleed Turbine System ..
3.
B.
. . .
. . . . . .
1.
of the Turbine . . . .
A.
. .
. . . .
. .
. . . . . .
. . . . .
. . . . .
. . . . .
. .
. .
. .
38
ANALYSIS OF THE DYNAMIC EQUATIONS . . . . . . . . . .
43
Open Loop Stability-
.
.......
.
.
.
.
.
.
.
.
1.
Development of Linear Equations
2.
Elimination of the Precursor Equation
3.
Stability Analysis of the Open Loop by means of
.*.
.
. ..
the LaPlace Transformation .. . ..
.
. . . . .
.. .
.
.
.
43
. . . .
43
.
45
.
. .
.
46
4.
A Physical Basis for the Stability Criterion . . . .
48
5.
A More General Statement of the Stability Criterion.
52
Open Loop Response
. . . . . .
. . . . .
.
.
..
.
.
1.
Location of Roots
2.
Prediction of Open Loop Response . . .
3.
Analog Simulation of Open Loop Response
4.
Discussion of Open Loop Simulation . .
5.
.
.
.
.
. ..
.
.
.
.
.
.
..
.
60
.
..
.
60
. . . .
. .
.
65
. . . . . .
72
. .
80
Variations of Open Loop Response . . . . . . . . . .
81
Closed Loop Stability . . . . .
. . . . . .
. . .
. . .
. .
. .
. . .
. .
86
. . .
. . .
1.
Temperature Controller Limits
. .
86
2.
Pressure Controller Limits . . . . . . . . . . . . .
90
Closed Loop Response
1.
2.
. .
. . .
. .
. . . . . . . .
. .
.
100
Comparison of Root Location for Open and Closed Loops 100
Comparison of Pressure-Valve Response of the
Suggested Turbopump Drives . . . . . . . . . . . . .
v
101
Section V:
NUCLEAR ROCKET ENGINE STARUP . . . . . . . . . . . .
Page
107
A.
Proposed Method
B.
Proposed Model . . .
. . .
108
C.
Results of Analog Simulation . . . . . . . . . . . . . .
109
Section VI:
. .
. .
. . . . . . .
. . .
. . . . .
. . . .
. . . . .
. . . . . . .
TRANSITION TO FULL POWER . . . . . . . . . . . . . .
A.
Limits of Feedback Signal Amplification
B.
Results of Simlation
C.
Results of Coefficient Variation for Full Power
Transition . . . ... . . . . . . *.
..
*. . .. . ..
. .
. . . . . .
113
. . . . .
114
. . . .
..
.
114
.
117
Transition to Full Power Using an Oversized Turbine
E.
A Comparison of Transition for the Two Turbopump Systems
FULL POWER CONTROL
112
. . . . . . . .
D.
Section VII:
107
117
. . . . . . . . . . . . . . . . .119
Response at Full Power . . . . . . .
. . . .
. . . . .
.
119
B. Full Power Control with Constant Control Rod Position. .
120
C. An Optinim Thrust Program for Nuclear Rockets
122
A.
D. Possible Malfunctions at Full Power
Section VIII:
SUMIARY AND CONCLUSIONS ...
. . . . .
A.
Stability
B.
Uncontrolled Response
C.
Controlled Response
D.
Startup
. ..
..
.
..
.
. . . . . . . . ..
123
...........
.
125
............
125
128
..............
. . . . . . . .
. . . . . . .
. ... .
. . . . . . .
. . . . .
. . . . .
130
. . . . .
. .
131
. . .
E. A Comparison of the Dynamics of the Proposed Turbopump
Configurations . . . . .
F.
. . . . . .
Recommendations for Further Study
.
. . .
.
. . . . .
List of Symbols . . . . . . . . . . . . . . . . . . .
vi
..
.
..
.
. . . . .
. ... ..
132
133
134
Table of Contents (concluded)
Page
Appendix I:
A.
Calculation of Constants . . . . . . . . . . . . . -
Calculation of Time Constants Associated with Fluid
Inertia and Compressibility . . . . . . . . - . .
136
.
136
B.
Calculation of Temperature and Pressure Time Constants
14o
C.
Computation of Reactivity Coefficients . . . . . . . .
D.
Specification of Arbitrary Design Parameters . . . . .
Appendix II:
Appendix III:
Appendix IV:
Appendix V:
Pressure Ratios Across the Turbine and Control
. . .
Valve of the Topping Turbine System, Case I
154
Pressure Ratios Across the. Turbine and Control
Valve of the Topping Turbine System, Case II
158
Development of the Dynamic Pressure Equations
Under the Assumption of Choked Flow in the
. .
. . . . . . .
. . .
. . . .
.
Formation of the Open Loop Stability Criterion by
.
.
..
.
.
.
..
Photograph and Description of the Analog Computer
. .
- - - - . - - - .
Facility . . . . . . .
Appendix VIII: Pressure Response to Valve Motion at Constant
. . . . . . . . . . . -.
a. ..
Temperature
A.
Bleed Turbine System
B.
Topping Turbine System, Case I
C,
Topping Turbine System, Case II
Bibliography
145
148
Application of Routh's Technique
Appendix VII:
143
Relation Between the Mean Core Temperature and
Maximum Surface Temperature . . . . . . . . . . . .
Topping Turbine
Appendix VI:
.I
. . . . . . . .
Biographical Sketch . . . .
. . .
. .
. . . . .
. . . . .
vii
.
- -
o
. .. .
.
.
-
.
. . .
- -
163
168
171
174
181
183
LIST OF FIGURES
Page
12
1.0
Schematic Diagram of a Nuclear Rocket Engine . . . .
2.
Coolant Flow-Chart . . . . .
.
13
3.
Reactivity as a Function of Pressure and Temperature
27
4.
Stability in the Temperature-Pressure Plane
49
5.
Stability Margin in the Temperature-Pressure Plane
6.
Root Locus at Idle Condition as a Function of / n
7.
Root Locus at Full Pover as a Function of
8.
Root Locus as a Function of Power Level
9.
Root Locus at Idle Condition as a Function of
. . . . . .
. . . . .
.
0
.
.
.
.0
63
64
67
. . . . . . .
68
Root Locus as a Function of
12.
Root Locus as a Function of Thermal Inertia (
. . . . . . . . .
p
62
T
11.
Simple Reactor System
.
. . . . . .
Root Locus as a Function of
'7
53
* n
10.
.
.
.
)for
.
.
.
69
.
73
-
75
a
. . . . . .
. -. . . . . . . .
. . . . . .
.
.
.
13.
General Analog Flow-Chart
14.
Detailed Analog Flo-Chart
15.
Open Loop Response . . . - - . - - .
16.
Open Loop Response (continued)
17.
Root Locus as a Function of Temperature Controller, Gi*
91
18.
Root Locus (Bleed Turbine) as a Function of Pressure
Controller, G3 *
. . . . . . .. . . .
* * . . .
. . . .
93
Root Locus (Topping Turbine) as a Function of Pressure
Controller, G 3 * . . . . . . . . . . . . . . . . . . . . . .
94
Root Locus (Bleed Turbine) as a Function of Pressure
Controller, G2* . . . . . . . . . . . . . . . . . . . . . .
96
19.
20.
21.
22.
...
0
.
*
.
76
0
. . . .
. . . . .0
. . . . . . .
.
.
79
84
. . . . . . .
Root Locus (Topping Turbine) as a Function of Pressure
. .
0
0 0 0 0 0 0 . . . . . . .
0
Controller, G 2 * .
.
.
Root Locus (Bleed Turbine) as a function of G3* for various
Values of G/G3* . . . . . . . . . . . . . . . . . . . . .
viii
.
.
97
98
Page
23.
Root Locus (Topping Turbine) as a Function of G * for
' . .
various Values of G2 */G 3 * ' ' ' ' ' ' ' ' ' ' ' .
..
.........
. .
' '
.. ..
99
105
24.
Pressure-Valve Response .
25.
Power Density and Pressure During Startup . . . . . . . . .
110
26.
Temperature and Pressure During Startup . . . . . . . . . .
111
27.
Normal Transition to Full Power . .
28.
Rapid Transition to Full Power
29.
Full Power Control
.-...
. . . . . . .
. . .
. . . . . . . . . ..
. . . . . . . .
. .
. . ..
-.
.
. .
115
. .
118
*.
121
LIST OF TABLES
Page
I.
II.
III.
IV.
V.
Specific Impulse Values and Gas Properties of
Propellant Combinations . . . . . . . . . . . . . . . .
9
Specific Impulses for Various Nuclear Propellants . . .
10
List of Coefficients and Constants
. . . . . . . . . .
Time Constants Associated with Fluid Inertia and
Compressibility . . . . . . . . . . . . . . . . . . . .
18
Symbols and Constants Employed in the Analog Flow-Chart
77
Section I: INTRODUCTION
A.
Nuclear Rocket Proposals
During the last years of World War II, technological innovations
were presented that greatly enhanced the possibility of space exploration.
The German V-2 rocket provided a convincing proof that long-range rockets
could be built and operated.
Moreover, the United States introduced the
first application of nuclear energy by exploding the atomic bomb at AlamoIt
gordo, New Mexico.
was obvious that a marriage of these innovations
Projects, such as gaseous core reactors and atomic bomb
should occur.
blasts (Project Orion),
energy directly.
were and are being proposed to use the huge nuclear
Practical considerations relegate projects of this sort
to the next decade.
However, more conventional means of using the power
of the nucleus for rocketry have been proposed in the literature as early
as 1948 by Shepherd and Cleaver
The United States Government has instigated Project Rover at the
Los Alamos National Laboratory in New Mexico to develop a nuclear powered
The primary result of the project has been the construction and
rocket(2).
operation of a nuclear
'ocket core, which has been dubbed Kiwi-A after the
flightless bird of Australia.0,04)
forward on a similar project (5).
secrecy, so that little
Nonetheless,
Undoubtedly the U.S.S.R.
is also moving
Both countries have veiled their work in
factual knowledge can be found in the literature.
independent work has been done and published as well as some
publication by companies who are sub-contracted to the Rover Project.
The
available information indicates that the first nuclear rocket will have a
graphite-uranium core that will be used as a high power density heat
exchanger.
In this design, (See Figure 1) the propellant is stored as a
cryogenic fluid in a large tank that comprises the bulk of the entire
rocket.
During operation, the propellant is pressurized in a pump, heated
*The numbers in
parentheses refer to the bibliography.
-2to high temperatures as it
passes through the core and is accelerated in
Some or all of the propellent gas drives the turbine which
a nozzle.
provides the power needed by the pump.
tions have been proposed.
Various turbopump drive configura-
Two are considered in this thesis.
B. A Comparison of Chemical and Nuclear Power for Rocket Engines
The superiority of nuclear fission energy as the primary power
source for rocket propulsion rather than the energy released by chemical
combustion of oxidizer and fuel can be shown by considering the kinematic
performance of a single stage, rocket vehicle.
It is assumed that the
rocket rises vertically with zero drag and constant specific impulse in a
The basis of comparison is the vehicle velo-
constant gravitational field.
city achieved when the engine has stopped.
This is termed the burnout
That engine which yields the highest velocity for the same ratio
velocity.
of payload weight to initial weight is adjudged superior.
Under the conditions imposed by the above assumptions, the
following expression can be derived for the burnout velocity.(2)
vb
Igo n m
-
goth
(1~1)
mb
where
vb
=
velocity relative to Earth at burnout
I
=
specific impulse of the propellent jet relative to the
rocket
mass of the rocket at burnout
mb
m
=
mass of the rocket at takeoff
t
=
time to burnout
0
If one assumes that chemical and nuclear rockets would operate for the
same time to burnout, then it
is clear that the highest burnout velocity
will be attained by that vehicle which has the highest value of Igo ln mo .
-3First, a comparison is made of the specific impulse of the two
types of engines and then the entire expression is considered.
If the expansion of the propellant in the nozzle is adiabatic
the following expression for specific impulse can be
and isentropic,
derived. (6)
where
R
Z
/
2
go
-1)-R
T
M-
1
(1-2)
=
ratio of specific heats
=
universal gas constant
To=
-
nozzle stagnation temperature
M
=
molecular weight of the propellant
PR
=
pressure ratio across the nozzle
The value of
is approximately the same in either type of engine.
p
Since graphite has good mechanical properties for temperatures up to 5500*R,
the propellant stagnation temperature at the exit of the core is in the
same range as that produced in a chemical rocket combustion chamber. The
same pressure ratios are possible.
Therefore, that engine which utilizes
a propellant of lower molecular weight has a greater specific impulse.
Molecular combination of the oxidizer and fuel molecules must
occur in the combustion process.
This combination is not required in the
nuclear rocket engine since the fission of uranium provides the energy
rather than chemical combustion.
The molecular weight of the nuclear
rocket propellant can be as low as two if pure undissociated hydrogen is
used.
The lowest molecular weight that has been attained in chemical
rockets has been nine.
significantly.(
It
It does not seem possible to reduce this value
is evident that a nuclear rocket, utilizing hydrogen,
will have a specific impulse more than twice that of a chemical rocket.
-4The phenomenon of dissociation of molecular species further adds
to the advantage in specific impulse of the nuclear rocket.
Since the
reactor core is temperature limited rather than energy limited, as is the
chemical rocket, dissociation can occur without lowering the stagnation
In chemical rocket combustion chambers,
temperature.
dissociation causes
a drop in stagnation temperature and has the net effect of lowering the
specific impulse.
Specific impulses of chemical and nuclear rockets are presented
in Tables I and IU. These figures demonstrate convincingly that nuclear
engines can clearly double the highest specific impulses attained with
present fuels.
Tormey(7) has shown that an upper limit of approximately
420 seconds exists for any chemical fuels that may be considered.
Although the nuclear rocket can develop a higher specific impulse,
it does so at the expense of carrying a heavier engine and structure to
Thus, the parameter of merit suggested earlier
the burnout altitude.
(Ig
o
) is not as large as might be expected from consideration only
in E
mb
of specific impulse.
the nuclear engine,
weight is
The core and reflector, which are major components of
greatly increase its
weight, while the added structural
primarily that of the large tanks needed to contain low density
liquid hydrogen.
If
we assume that the specific impulse of a nuclear rocket is
double that of its
chemical counterpart,
the mass ratio,
M
of the nuclear
rust be equal to or greater than the square root of the mass ratio
rocket
of a chemical rocket if
attained.
an equivalent or superior burnout velocity is
to be
If a burnout velocity of 30,000 ft/sec is desired, a chemical
rocket whose specific impulse is 400 see would require a mass ratio of 10.2.
This value approaches the maximu
(39
design.
that can be attained with any practical
The same burcout velocity could be attained by a nuclear rocket
-5whose specific impulse was 800 sec and whose mass ratio was 3.2.
ratio is possible even with the heavier engine and structure.
This
Future
developments should permit even higher mass ratios for nuclear powered
rockets.(l4)
C. Possible Dynamic Problems of Nuclear Rockets
The decoupling of power produced and the flow rate of propellant
in a nuclear rocket engine is an inherent and fundamental feature not
common to the dynamics of chemical rocket engines.
It
is obvious that if
more power is required in a chemical rocket, then more fuel, thus more
propellant, mtst be brought to the combustion chamber per unit time.
A nuclear rocket can conceivably operate at any power level, including a
catastrophic one, without any propellant being present .
This is the
primary reason for its high capabilities and inherent dangers.
Atomic energy has been successfully used in reactors for almost
two decades.
The problems of control have been examined, the solutions
applied and found satisfactory.
Conventional reactors are easily controlled
because rapid changes of power level are not necessary.
if
ever, made prompt ci'itical.( 8 )
However,
They are rarely,
in a rocket engine, slow
change of power level causes a large wastage of propellant, making the
rocket inefficient to the point of being useless.
If nuclear power is to
be satisfactorily applied to rocketry, rapid, but controllable, charges in
power level must be possible.
In order to achieve this, the reactor must be prompt critical.
The power level would then have an e-folding time measured in milli-seconds
or less.
This precludes instantaneous control by mechanical motion of
control rods, reflectors or poisons.
For short periods of time when the
core is prompt critical, the rocket must be inherently stable without
controls, if
it
is to be used with any reasonable degree of safety.
-6If the core has a prompt negative temperature coefficient,( 8 )
the problem of dynamic instability will not be as severe, but it
is not
necessarily solved.
An increase in the amount of hydrogen, an excellent neutron
into an under-moderated system reduces the fast leakage,
moderator,
increasing the reactivity.
reactor if
it
thereby
The phenomenon would not exist in the rocket
were over-moderated rather than under-moderated, but this
cannot be avoided.
The ratio of moderator atoms to fissile atoms must be
small in order to insure a high power density.
Furthermore, only graphite,
a poorer moderator thaz hydrogen, can maintain satisfactory mechanical
properties at the high temperature of a nuclear rocket.
problem is
Thus, the dynamic
further complicated by positive reactivity feedback induced by
increased hydrogen density in the core.
did not include it
Felix discussed the problem but
in his analysis of nuclear rocket dynamics.(11)
The above phenomenon can conceivably cause an instability in a
nuclear rocket engine using a gas turbine, driven by heated and compressed
propellant, to drive the propellent pump.
An increase in system pressure
increases the density of hydrogen in the core,
causing a positive react ivity.
If uncontrolled, the core power level would increase as would the turbine
output power.
Therefore, the initial increase in pressure can cause a
further pressure increase.
The system would then be unstable.
Consideration imzst also be given to instabilities introduced by
equipment malfunctioning, such as pump failure, stoppage in a coolant
channel, erosion of the graphite, etc..
D.
Problems of Control
The proposed control system mst be capable of making corrections
of thrust and specific impulse while the engine is in operation.
more, it
Further-
mist not only be a stable system, but mzst yield a rapid response
-7without dangerous overshoot.
Feedback control of the core temperature and
pressure should be able to meet these criteria.
two
zones of operation.
Zone 1:
It
will be examined for
An initial startup zone is also investigated.
Subcritical to intermediate power (idling condition)
Since introduction of hydrogen to the bare core yields a positive
reactivity, the reactor can be taken from subcritical to supercritical
without control rod movement.
As the power level of the reactor increases,
following the introduction of hydrogen, the turbopump mist be started.
At
the intermediate power level, the turbopump should be self-sustaining.
A core pressure and temperature of 200 psi and 1000OR should be sufficient
for this operation.
Since the control mechanisms are not needed for the
original reactivity increase, they will be positioned for the intermediate
power level.
A negative temperature coefficient of reactivity should insure
that the intermediate state is attained rather than a catastrophic one.
Zone 2:
Intermediate to full power
It
is unlikely that the control rod setting corresponding to full
power would also correspond to an intermediate power level.
Some part of
the change from intermediate power to high power will requaire control rod
motion.
Once the idling condition has been achieved, the rocket propellent
tank furnishes the propellant.
In order to utilize the tank hydrogen as
effectively as possible, the time between idling and full power should be
reduced to a miniimum.
Therefore, the control mechanisms must be repositioned
as q~uickly as possible without causing dangerous overshoots of pressure
and temperature.
-8Zone 3:
Full power control
Wang(10) has saown that the thrust of a nuclear rocket should be
varied for an optimum burnout velocity.
Even if
his program for thrust
should prove impractical, some change of control mecbanisms will probably
be necessary during full power operation to achieve the desired trajectory
or to counteract the effect of carbon erosion or other component wear.
E.
General Attack
a more detailed description of the rocket is given.
In Section II,
Two turbopump systems are presented and compared, although not from a
The design is chosen only to provide approximate
dynamic point of view.
values of parameters.
The analysis is general and applicable to any nuclear
rocket which uses a reactor as a high power density heat exchanger.
A model, based on the design parameters of Section II,
proposed in Section III.
is
Equations are derived for the model which describe
the transient behavior of the engine.
In order to keep the analysis general,
a lumped parameter model is used, and the number of equations is kept to a
minimum.
A physical understanding of the system is thereby maintained for
the analytic work as well as the solutions obtained by analog computers.
A linear analysis of the equations of Section III for both the
controlled (closed loop) and uncontrolled (open loop) engine is presented
in Section IV.
From this analysis, conclusions can be drawn concerning
stability, speed of response, damping characteristics and oscillatory
behavior.
The
turbopump systems are compared from a dynamic point of view.
The various zones of operation are discussed in Sections V, VI,
and VII.
The d-scssion is based primarily on the results of the solution
of the dynamic equations by a Philbrick Analog Computer.
Finally, conclusions and suggestions for further work are
presented in Section VIII.
-9TABLEI*
SPECIFIC IMPULSE VALUES AND GAS PROPERTIES
OF PROPELTANT COMBINATIONS.
OXIDIZER
PC = 500 PSIA
FUEL
Tel *F
M
P=
/
1000 PSIA
Is
Hydrogen Peroxide
Gasoline
4830
21
1.20
248
273
Hydrogen Peroxide
Hydrazine
4690
19
1.22
262
288
Nitric Acid
Gasoline
5150
25
1.23
240
255
Nitric Acida
Aniline
5100
1.23
235
258
Nitric Acid
Ammonia
420
21
1.24
237
285
Oxygena
Alcohol
5560
22
1.22
259
261
Oxygena
Gasoline
5770
22
1-24
264
290
Oxygen
Hydrazine
5370
18
1.25
280
308
Oxygen
Hydrogen
4500
9
1.26
364
400
Flourine
Amonia
7224
19
1.33
306
337
Flourine
Hydrazine
7940
19
1.33
316
348
Flourine
Hydrogen
5100
9
1.33
373
410
a
Liquid propellant systems now being used in the U.S.
Te =
Combustion Chamber Temperature,
M =
Average molecular
=
* F
eight of combustion products
Ratio of molar specific heat at constant pressure and volume.
* Taken from Reference 7.
-10*
TABLE II
SPECIFIC IMPULSES FOR VARIOUS EUCLEAR PBRPELLAIqTS
PROPELLANT
DENSITY
as stored, lb/cuft
THRUST CHAMBER SPECIFIC IMPULSE (Sec) at
indicated Gas Temperature, *F
3,000
4500
6000
7500
9000
4.4
627
761
890
1041
1216
Helium
18.0
395
473
540
599
653
Ammonia
43.0
307
370
499
577
Water
62.0
222
272
Hydrogen
* Taken from Reference 13.
-11-
Section II:
A.
DESCRIPTION OF THE ROCKET
Overall Desiga
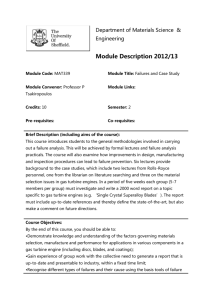
Figure 1 is a schematic diagram of the rocket engine, which is
similar to one presented by Stenning and Smith (32).
Licuid hydrogen is
stored in insulated tanks and pressurized by helium.
Leaving the pump at
high pressure, the hydrogen regeneratively cools the nozzle and reflector
and then enters the plenum for the main pass through the core.
A small
amount of the hot propellent gas is bled off from the gas mixing region in
front of the nozzle and drives the turbine.
A valve between the mixing
region and turbine determines the flow to the turbine and thus provides
system pressure control.
After leaving the turbine, the gas exhaust is
used for thrust recovery in small auxiliary nozzles.
This system is referred
to as a bleed turbine system.
Rather than using a small amount of gas at high temperature to
drive the turbine, the entire flow at a lower temperature could be used to
drive a topping turbine.
In this system, the hydrogen is regeneratively
heated in the nozzle, reflector and outer regions of the core, then passes
through the turbine and enters the core for the main pass.
controlled by a valve i
The flow is
front of or immediately behind the turbine.
The
flow charts of these systems are shown in Figure 2.
B.
A Compari7son of the Bleed Turbine and Topping Turbine Systems
Both turbopimp drives have been used in chemical rockets and
proposed for nuclear rockets.
Although the bleed turbine drive has been
preferred in the past, the topping turbine has two advantages.
(1)
Lighter weight.
Because of greater flow through the turbine, less work is extracted
per unit flow.
The blade speed is
less than the bleed turbine, and there
12
CONTROL
PLENUM
VALVE
CORE
NOZZLE
FROM
TAN K
A.
BLEED
TURBINE
SYSTEM
E
R O L VA LV
T NCO
P
O PN
TURBINREFLECTOR
B.\T
PUMP
B.
TOPPING
TURBINE
CONTROL
C.
FIG. I
TOPPIN G
SCHEMATIC
SYSTEM,
CASE I
VALVE
TURBINE
DIAGRAM
SYSTEM
,
CASE
OF A NUCLEAR
If
ENGINE
BLEED
TOPPING
TURBINE
TURBINE
SYSTEM
SYSTEM
(CASE
I)
C,)
TOPPING
TURBINE
FIG. 2
SYSTEM
COOLANT
(CASE II)
FLOW -CHART
-leis no need for speed reduction gears between turbine and pump.
This
results in a lighter system.
(2)
Slightly higher specific impulse.
Although thrust recovery nozzles are used for the bleed turbine exhaust,
there is a reduction in the specific impulse attained due to the large
pressure drop in the turbine.
Since all propellant passes through the main
nozzle in the topping turbine system, there is no loss in specific impulsefor the same nozzle stagnation pressure.
C.
Component Description
(1)
Core
Various authors have proposed that the rocket core should be a
graphite matrix, impregnated with uranium-235.(13, 14, 15)
Graphite is a
good neutron moderator and possesses excellent mechanical and thermal
properties at high temperatures.
is taken as 500.
The atom ratio of carbon to uranium-235
Reynolds( 16) has investigated atom ratios from 150 to 1500
with corresponding buckling of
25.5 x 10-4 cm-2 to 17.5 x 10- 4cm2.
The atom ratio choice of 500 ensures criticality and retention of graphite
thermal and mechanical properties in the matrix.
Lower values of atom ratio
would jeopardize these properties.
Various methods of core construction have been proposed..(l3,1)4) 5)
One of the most feasible is a right circular cylinder approximately 5 ft
in diameter and length, composed of a homogeneous graphite-uranium matrix
in which 1/4 inch holes are drilled parallel to the axis for coolant flow.
A void coefficient (coolant volume fraction of total core volume) of 30%
seems suitable.
This design would insure criticality, good heat transfer
characteristics, and high thrust and specific impulse.(l7)
-15Erosion of the graphite along the coolant channels by the hot
gas might cause severe damage to the core.
It
has been proposed that the
channels be clad with tungsten or a ceramic, which would introduce criticality and heat transfer problems.
Since it
should be possible to stay below
a critical erosion temperature, the cladding proposal is not considered in
this paper.
(2)
Reflector
A reflector around the core flattens the power density and lowers
the necessary critical mass.
suitable.
Either pure graphite or beryllium oxide is
Most papers(14, 15) on this subject favor a six inch radial
reflector of BeO, with 10' void for regenerative cooling.
(3)
Reactivity Control
Although control rods have been mentioned in the previous chapter,
they present serious problems of cooling and of pressure seals for the
drive mechanism.
For a high power density rocket reactor, reflector control
should be satisfactory and alleviates the problems inherent in control rods.
The design offered by Newgard and Levoy(15) is suitable.
(4)
Pump
A centrifugal pump pressurizes the propellant.
A volume of 10 ft
and length of 3 ft is chosen to compute charging time and acoustic time of
transit.
(5)
Turbine
A multi-stage, axial-flow bleed turbine and a single-stage, axial
flow topping turbine provide the power needed to drive the pump in the
various turbopump systems proposed.
The time constants mentioned in (4)
are computed by setting the volume and length equal to 20 ft
respectively.
3
and 4 ft,
3
-
(6)
16-
Controls
The reflector (reactivity control) and control valve (flow
control) are positioned according to feedback signals based on core
temperature and pressure respectively.
Since choking exists in the nozzle,
the core exit temperature can be computed from pressure and flow measurements rather than from thermocouples
rocket engine control.
the standard manner.
hich are too slow for satisfactory
The stagnation and static pressures are measured in
Of course, many parameters are measured in flight,
but we are concerned only with those associated with control.
As mentioned in Section I, the design has been chosen only to
provide approximate values of the parameters necessary to describe the
dynamics of the system. A more detailed design than presented above would
reduce the generality of the analysis.
Some of the details are mentioned
only for purposes of description and have no effect on the derivation of
the dynamic equations.
These details will be obvious in the derivation,
which is presented in Section III.
-17.17.
DERIVATION OF THE DYNAMIC EQUATIONS
SECTION III:
A.
Lumped Parameter Analysis
In order to make the analysis simple and meaningful, a lumped
parameter model is proposed, in accordance with the philosophy mentioned in
Section I.
Under this assumption, one value characterizes the value of a
parameter throughout the system.
Of course, the assumption is not strictly
true, but the simplicity and resultant physical intuition justify the
Furthermore, a distributed rocket core temperature
inaccuracies introduced.
study of Yoshitani(12) has shown that the lumped temperature dynamics of
the rocket core deviate little from those of distributed temperature.
Since the design is chosen only to provide approximate values of
constants which appear as coefficients in the lumped parameter equations,
the coefficients are assigned a range of values and the effect of the
variation is investigated.
B.
Fluid Inertia and Compressibility
The compressibility of hydrogen is considered only to derive
steady state equations of fluid flow and heat transfer in the engine.
The
transient effects of fluid inertia and compressibility are neglected.
Consequently, the resultant time constants are associated with core heat
capacity and turbopump inertia and are of the order of seconds.
(See Table 3
at the end of Section III).
If fluid inertia and compressibility are considered, constants
arise which are associated with the time necessary for charging the
components with fluid and for acoustic propagation.
Since the fluid
properties and component configurations are known, these constants can be
calculated and appear in Table 4.
in Appendix I,
Their actual calculation is presented
as well as various other constants which appear in the
course of the derivation of the dynamic equations.
-18Table rV
Acoustic
propagation time
Charging time
Pump
.02 sec
.003
Bleed Turbine
.02
.0003
Topping turbine
.003
.0007
Main pass through core
.003
<
sec
.003 *
The constants in Table 4 are orders or magnitude smaller than those time
constants associated with the thermal inertia of the carbon-uranium matrix
or the mechanical inertia of the turbopmp.
For this reason the high and
low frequency transients of the fluid dynamics can be decoupled.
This has
Since the high frequency dynamic behavior
been pointed out by Felix.(
is not peculiar to the nuclear rocket engine, but occurs in many applications, only the low frequency fluid dynamics are considered, with the
justified assumption that charging and acoustic transients will have no
effect on the low frequency system.
C.
Neutron Kinetic and Precursor Equations
The standard neutron kinetic and precursor equations are
employed. (8)
dn
+.(
-
* Since the Mach number in
the core is
kC(3-2)
always less than one,
time constant is less than the charging time constant.
the acoustic
C19where:
n
01
=
neutron density
=
reactivity
=
total fraction of delayed neutrons
=
precursor group fraction of neutron yield
=
effective neutron lifetime
=
precursor group delay constant
=
precursor density
The effective neutron lifetime,
1,
is computed by Westcott's method.
Although his teclhnique applies primarily to well moderated, thermal reactors,
the results, presented in Table 3, agree with more sophisticated computations of Sams and Newgard.(14,15)
The precursors diffuse through the graphite rapidly at the high
temperature of a rocket reactor.
Many diffuse into the coolant channels
and are swept out of the core before releasing delayed neutrons.
dynamic effect is a reduction of
of 0.065.
The net
from the experimentally measured value
Since no data is available in the literature on this subject, an
effective value of .0050 is assigned.
A part of the analysis of the dynamic
behavior is an investigation of the effect caused by a change in the
precursor yield fraction.
Precursor groups which decay more slowly have less chance of
contributing neutrons to the core than the faster decaying groups.
values of
are assigned accordingly and presented in Table 3.
The
For
analytical work a standard technique is adopted whereby all precursors are
assumed to behave as one group with average properties.( 8 )
Although all six groups can be simulated on the analog computer,
the same accuracy is obtained by using two fictitious groups whose constants
are derived by approximating the exact reactor transfer function.(2)
A
D.
Thermal Equation
1.
Core Temperature Variation at Steady State
Stenning(17) has shown that the following relation exists, provided
the power density is constant and the heat transfer-friction analogy
is
applicable:
T
(3-3)
2
S
TO
01
'0 2
+1---
01
where
N
at
Stanton number
T
= maximum surface temperature
T
=
stagnation temperature of the coolant at the entrance to the core
"
T0 2
f
"
"
exit of the core
friction factor
L
P
length of the coolant channel
D
=
diameter of the coolant channel
In the region of interest, a constaat poler density distribution causes a
higher maximum surface teerature than a sinusoid distribution for the
4ftL
02
(7
same values of
and T
.
)
Since the temperature of the
carbon uranium matrix is the limiting factor, the assumption of a
constant power density is
the derivation.
ore conservative and is adopted throughout
The Prandtl number of hydrogen is approximately one
under all conditions of temperature and pressure.
Thus, the heat transfer-
friction analogy is valid and equation (3-3) is applicable for temperatures
in the rocket core.
-21Hydrogen enters the core as a pressurized cryogenic fluid
and reaches the core exit at the highest possible temperature thast
the core can withstand.
Conseguently,
T.1
T0 2
01
01
For this reason, equation (3-3) can be accurately approximated by
T
s
2
T0 2
( -' --
( 3 -4)
is assumed constant, the maximva surface
If the friction factor, f,
temperature of the core is proportional to the coolant exit temperature.
T
<
(3-5)
T02
The average temperature of the graphite-uranium matrix is
proportional to the maximm surface temperature.
This can be shown
by solving the tim independent heat conduction equation as shown in
Appendix II.
2.
Core Pressure Variation at Steady State
By assag
that the vall shear stress in the core coolant
channel increases linearly with distance along the channel, Stenning (17)
has shown that the following relation exists between inlet and outlet
stagnation pressures:
PO01
(3-6)
2
P0 2
X-7
where
M
-LV
=
ratio of specific heats
=
Mach number
-- -
subscripts 1, 2 = Entrance, outlet of the channel.
The assumption of
linearly increasing vall shear stress has been justified by the
agreement of the above result with numerical integration of the
differential equations of one dimensional compressible gas dynamics.
In rocket operation the Mach number at the entrance of the
channel i
1% by
small and equation (3-6) can be approximated to within
23-
1 + /
P01
2
M2
2M
(3-7)
)A2
2
1
022
)
D
1+
2
2
In the same paper, Stenning points out that if the expansion in the nozzle
is isentropic and adiabatic, which is an excellent approximation, the Mach
number at the exit of the channel is constant so long as choking exists in
This is
the throat of the nozzle.
the situation in all
cases of interest.
Thus, the inlet and outlet stagnation pressures are proportional.
<P
P01
3.
(3-8)
02
Expression of the Mass Rate of Flow as a Function of the Core
Inlet Stagnation Pressure and Maximum Surface Temperature
If
fluid compressibility and inertia are neglected, as mentioned
in subsection B, the mass flow rate,
system at any given instant of time.
drive in the bleed turbine system is
W
,
is constant throughout the
(The mass flow used for turbine
less than 2/ of the total flow rate
and is neglected in the following formulation.)
It is convenient to replace
the flow rate by an expression involving only temperature and pressure.
Since choking occurs in the nozzle throat, the following condition exists:
__t_
=
constant
=
stagnation temperature at the throat
=
stagnation pressure at the throat
(3-9)
PO
where
T
ot
P0
The expansion of the propellant in
is
passing from the core exit to the throat
assumed adiabatic and isentropic.
Consequently, /0Il/'
=
7
and Tbo = To.
By substituting the above equalities into equation (3-9),
the flow-rate is proportional to the ratio,.
we can show that
and
To 2
and (3-8),
and
/
are eliminated by substitution of the expressions of (3-5)
the following expression is formed.
ej
(3-10)
01
c><
S
4.
Formlation of the Time-Dependent Maximum Surface Temperature as
a Function of the Neutron Density and Core Inlet Stagnation
Pressure
Conservation of energy dictates that the heat generated within
the core by fission must either be removed by the coolant or be stored in
the form of thermal energy.
Energy transfer from the core by radiation and
conduction is negligible in comparison to the convective cooling of the
propellant as it passes through the core.
The time derivative of the
conservation statement yields a power balance which is stated below.
power released
by fission
time rate of change
of thermal energy
of the core
heat carried away
by the coolant
per unit time
.
The power released by fission is proportional to the neutron density.
a constant of proportionality, K 1 , is
introduced, the above statement can
be expressed as
dT
dt
MC
where
M =
C
Tag
K
/p
n
If
-
.c
(T
-T
)
02 co01
mass of the graphite-uranium matrix
=
specific heat of the graphite-uranium matrix
=
average temperature of the graphite-uranium matrix.
-25-
It
has been shown in Appendix II that the ratio of the maxinrum surface
temperature, T., to the average core temperature, T
Consequently
dT
can be replaced by T a
,
In the third term of
dTs
Ts
is constant.
dt
the power balance, To, is insignificant in comparison with T0 2 and is
The proportionalities
neglected.
and T0 2 .
(3-10)
and (3-5)
are substituted for 4-'a
Thus, the heat carried away by the coolant per unit time is
proportional to
.F If a second constant of proportionality, K 2 ,
Po 1
is introduced, the above equation is expressed as
MC
T
dT
T8 dt
K
n
1
- K2
2
P1
017TS
(3-11)
The constants K, and K 2 are eliminated by a scaling technique presented in
subsection I of this section.
The single constant formed by this technique
is calculated in Appendix I and presented in Table 3.
We have now succeeded in expressing the time-dependent maximum
surface temperature as a function of the neutron density and inlet stagnation
pressure.
In accordance with a lumped paramenter analysis, the maximu
surface temperature and core inlet stagnation pressure are defined as the
charateristic parameters of the rocket engine pressure and temperature
distributions.
E.
Reactivity Equation
Reactivity is a function of core temperature,
hydrogen density,
and control rod position (or reflector position, depending on design).
Control rod position offers no problem of formulation, since the position
is expressed in units of reactivity.
A Fermi-age model of neutron interaction is assumed in order to
calculate the reactivity effect of core temperature and hydrogen density.
-26Reactivity decreases linearly with increase of the square root of core temperature if
the hydrogen density is constant.
The primary effect is the
increase of thermal diffusion length as a result of decreased absorption at
higher temperature.
The effect is explained in detail in Reference 9,
pages 487- 489.
Increase of hydrogen density
Hydrogen is an excellent moderator.
reduces the fast leakage proportionately and increases the reactivity.
Since density is proportional to the ratio of pressure to temperature,
density in the core is proportional to
.
the
These considerations lead to
a reactivity equation of the form
01(3-12)
+
T
S
where
C =
Of C=
=
control rod reactivity
bare core temperature coefficient of reactivity
hydrogen density coefficient of reactivity
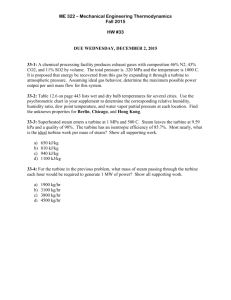
Figure 3 i*s a plot of reactivity as a f'unction of the square root of
temperature for various values of pressure.
from this graph.
o'
and
are calculated
The calculation is presented in Appendix I and is in good
agreement with that of Newgard and Levoy.(15)
F.
-<
=
0.001
*R
of
=
0.3
*R/psi
1/2
Temperature Control Equations
Integral feedback is employed for temperature control.
Since the
square root of temperature is measured, the feedback signal is computed
directly from the square root rather than temperature itself.
rod is positioned according to the feedback signal.
The control
Because the rod
27
.20
I
I
I
.16
.12
mean coolant
0
0
A)
pressure
.08
.04[
O 25
30
40
35
50
45
-/Mean Coolant Temperature
FIG. 3
REACTIVITY
AND
AS
A FUNCTION
TEMPERATURE
OF
PRESSURE
55
-28response cannot be instantaneous,
a first order lag is introduced between
the desired rod setting and the actual setting.
Equation (3-13)
indicates
the formation of the signal; equation (3-14) indicates the first order lag.
t
G
-
dt
(3-13)
(3-14)
Cdt
where
/
=
desired control rod reactifity
G
=
integral signal amplification
T
=
desired maximum temperature
=
time constant of control rod motion
The control rod cannot respond rapidly to proportional feedback
control because of its large inertia.
It
is
shown in later chapters that
integral control is satisfactory.
G.
Pressure Equation
1.
Bleed Turbire System
The primary principle in the derivation is conservation of energy
which is expressed as
time rate of change of
kinetic energy of the
rotating machinery
=
turbine power (OT)
-
pump power (Op)
(3-15)
Kinetic Energy
=
IN2
2
where
I
= Moment of inertia of the rotating parts
N
=
Speed of rotation in radians/sec
(3-16)
-29-
(4-/
0,
(3-17)
7TO*
7T
where
=
4T
turbine efficiency
flow rate through turbine
=
PR
T
pressure ratio across the turbine noszles
m stagnation temperature in front of turbine
#p
-t
PT
=
where
7
(3-18)
tank storage pressure
pump efficiency
p
density of hydrogen in pump
The problem is to reduce equation (3-15)
to terms involving only the core
inlet pressure, the core surface temperature, and a valve setting.
In order to eliminate the turbine flow rate, the valve characteristics
are examined.
The valve is in front of the turbine and controls the pres-
sure to the turbine.
The valve flow equation can be expressed as
Roy
where
T
/(3-19)
stagnation temperature in front of the valve
stagnation pressure in front of the valve
Po3
=
P04
w stagnation pressure behind the valve
Av
M area of the valve
~-1-
=
a fanction of the indicated pressure ratio
That point of a core coolant channel from which the propellant is bled to
drive the turbine is tized by the design.
Consequently, %3 may be assumed
proportional to the coolant exit stagnation pressure, Po2,
and T o3 'my be
assumed proportional to the exit stag ntion temperature.
-30The flow through the bleed turbine is choked.
_
AT
-
_17_-__
W constant
(3-20)
is the cross-sectional area of the turbine nozzles.
temperature on either side of the valve is the same.
The stagnation
Consequently, division
of the above two eqations yields
AT
P o4
0o4)(2l
-)
(3-21)
03
A unique value of P 0/P
03
3
is determined by each valve setting and the
following fictitious valve setting may be defined:
Y(Av)
(3-22)
= P04/Po3
If the proportionalities of (3-5) and (3-8) are employed, the flow-rate
through the turbine is expressed by
(3-23)
r
The pressure ratio, PR, across the turbine nozzles remains constant because
of choking in the nozzles and in the exhaust ducts.
is constant, the turbine power is proportional to
/AJ
If turbine efficiency
T
since the stag-
nation temperature remains constant across an adiabatic valve
Incorpora-
tion of the proportionalities (3-5) and (3-23) yields the following
expression for the turbine output power.
76
<>
(3-24
Similarly, a reduction of the pump power equation can be made.
hydrogen density in the pump and the pump efficiency are constant.
The
It
has
been shown that the flow-rate through the pump is proportional to P
Finally, the tank storage pressure is neglected in comparison to
the pressure developed by the pump.
Thus
8
01 /7
It
is assumed that the pump operates on the flat portion of its
Consequently
characteristic.
P
K,
where
(3-26)
(3-27)
2
N
P
T
= pump constant
01
- P
us to replace the
PT is neglected', as before. Equation (3-27) enables
square of shaft speed by core inlet pressure in the kinetic energy term.
kinetic energy
I
=
(3-28)
0
2K
are replaced by terms involving
The terms in the original equation ( -15)
only core inlet pressure, core surface temperature, and the fictitious
valve setting.
In particular, equations (3-24), (3-26)
and (3-28) are
utilized.
I
2 K
d P
dt 01
K
V P
K
4
1
s
5
P 2_0(3-129)
K4 and K are constants of proportionality which are handled in a manner
similar to those which appeared in the temperature equation.
Again, the
single constant formulated after scaling is calculated in Appendix I and
presented in Table 3.
2.
Topping Turbine System with Control Valve in Front of the Turbine
The same attack as pith the bleed turbine is applicable here.
However, in the analysis more local pressures and temperatures are considered and reference should be made to Figure 2 for an understanding of the
subscripts.
We first consider pressure drops encountered by the coolant in
The pressure rise across the pump is
flowing from the tank to the nozzle.
expressed satisfactorily by the pump power equation.
The pressure after the
first pass through the core is assumed proportional to the pressure at the
Since this drop is small compared to the drop
beginning of the pass.
across the valve, the assumption is
<
02
justified.
(3-30)
"03
The pressure drop across the valve is
(-31
Z
04
03
The pressure drop across the topping turbine is small and the flow can be
treated as incompressible.
Thus, the incompressible flow nozzle eguation
describes the pressure drop across the turbine.
(3-32)
04
05
A
o
Flow through the core and nozzle is the same as derived previously.
By considering the above equations, it
can be shown that the
05/P04, across the turbine is a constant and does not
press re ratio,
depend on the valve area,
In order to show this we first consider the
,2 The heat transferred per unit time to the
temperature ratio,
coolant during its
AV.
first
pass must be proportional to the heat transferred
during the main (second) pass since both depend on the neutron flux level
or the powe:: density in the core.
C(T
O C
03
T0 )2
r(
cancels from both sides of the equation.
06
T0 5 )
T 0 2 is neglected in
in comparison to T0 6 . Under these assumptions,
comparison to T0 3 , as is T 0506
M33-
Since T0 6 is
, is constant.
th e ratio,
the core exit temperature,
it
To6
is proportional to the maximum surface temperature, Ts.
Consequently,
T
This consideration,
(3-34)
T
3
application of the perfect gas law, and equations
P
(3-31) and (3-32) are sufficient to show that
manipulation is presented in Appendix III.
on.ly on valve setting.
P
is constant.
P0 4
03
"---m
Furthermore,
As before a fictitious valve setting is
04
The
depends
satisfactory.
(3-35)
v(AV)
-
p0 3
The definition of V(Av)
05
V
is extended to include the pressure ratios encounL-
tered between the pump outlet and core inlet.
Since the ratio across the
first pass is assumed constant, the ratio across the valve depends only on
valJve area, and the ratio across the turbine is
constant,
the following
dcefinition can be made:
P
P 05
V(AV)
(3-36)
P02
Development of the pump power equation proceeds along similar
line s.
'-
S02)
The flow-rate is
sure, P
P0 1 )
(3-37)
replaced by core temperature and pressure.
is neglected in comparison with P o.
The tank pres-
Finally, P 0 2 is replaced
by the core inlet pressure, P 0 5 , by means of (3-36).
p0 5 2
ep<
010 ~
----
V_-TY'
(3-38)
-34Since the pressure ratio across the turbine is
Therefore,
ad.iabatic.
of (3-10)
Substituting for T
T0 4 = T0 3 .
the
The valve is again assumed
.) T o.
turbine power is proportional to
constant,
and (0 by means
and (3-34) yields
Or=< P05
T",(3-39)
The kinetic energy term -is -formulated in a manner similar to
that of part 1.
IN
kinetic energy =
I P
2
02
2 K(3-4)
-
P
replaced by P 5
P0 2 is
I05(
kinetic energy
2 K
Equations (3-38),
conservation statement,
P
(3-39),
V
and (3-41) are substituted into the
(3-15) and constants of proportionality are intro-
dOuced, which are treated in the usual manner.
The pressure equation of
the topping turbine system is now
I
2K
3.
d
dT
P05
V
K
0
K6 -/
05
K
P
2
(3-42)
052
Topping Turbine System with Control Valve after the Turbine
The same equations as in parts 1 and 2 are sufficient to describe
the flow through the various components.
Some changes in subscripts occur;
these can be noted in Figure 2.
The ratio of pressure developed by the pump to the core inlet
pressure is a fuction only of valve area.
(See Appendix IV)
the ratio is set eqaal to a fictitious valve setting.
As before,
=
---.
02
(3-43)
v(AV)
With this definition, the kinetic energy term and the pump power term are
exactly the same as in Part 2.
However, in the present system, a change in the pressure ratio
causes a change in turbine output power.
This may be seen by the following
derivation:
The usual expression for turbine power is presented below.
,
-
(3-44)
In order to express variations of pressure ratio more simply, the term
[1
(
4)]
Since
is expanded in a Taylor Series about Po3.
P0 3o.
is small in a topping turbine, only the first term of the series
P03
is retained.
This approximation is then incorporated in the expression for
tu.rbine power.
c
77 -TCP
T
.~
(--03
(3
(P 0 3 '0P0 4 )
(3-45)
(P03 - P04) is eliminated by substitution of the turbine pressure drop
equation.
P03
04
=2
-
The perfect gas law is applied in order to eliminate
is now expressed by:
(3-46)
Turbine power
-36-
T2
Or
7 137- C
The usual substitution is made for to
R,(3-47)
~
T1,0
03
TT r
To3 is replaced by the core surface
temperature, TS'
2
c 05
P057
(3-48)
Ts
P03
It
has been shown that P03 may be taken as proportional to P02
the ratio L9.5
Therefore,
appears in the turbine equation and may be replaced by the
Po2
valve setting, V(AV).
Thus, the expression for turbine power for this
turbopump configuration is
2
P05
T
With the above equation, the pressure equation for the topping
turbine with control valve behind the turbine may be stated.
I
2K
p
d
dt
K
K
P
K8 V2
05 -
2
P
(3-50)
/
Again, the constants of proportionality, K 8 , and K9 , are replaced by a
single constant.
Calculation of the constant is presented in Appendix I.
The derivation of both topping turbine systems assume that the
flow through the turbine can be described by incompressible flow equations.
The opposite extreme of this is
choked.
to assume that the flow in
the turbine is
This is done in an analysis presented in Appendix V.
In the
topping turbine system with control valve in front of the turbine, the
-037In the second system, (valve behind the
resulting equation is the same.
turbine) the equation is not the same, but is similar to the bleed turbine
However,
Thus, one might question the range of applicability.
equation.
for reasons of system dynamics, which are given later, only the first
topping turbine system will be fully analyzed.
The result of the analysis
indicates that the pressure equation for the first topping turbine system
has a large range of applicability.
4.
Pressure Control Equations
The same technique is used for pressure control as for tempera-
ture control.
The control valve is positioned according to a feedback
signal which is the sum of the proportional and time integrated difference
between the desired system pressure and the measured pressure.
Again,
instantaneous valve response is impossible and a first order lag is introduced between the desired valve position and the actual position.
These
conditions are described by the following equations:
V
x
=
G
(P - P) dt
x
+
G 3 (P x - P)
(3-51)
0
7dV
vdt
where
v
x
-v
V
=
desired valve setting
G2
=
integral signal amplification
P
=
desired pressure
P
=
system pressure (core inlet pressure)
G3
=
proportional signal amplification
(3-52)
-38I.
Scaling of Equations
The equations which have been derived and are to be used in the
T
and
P
analysis are repeated below.
without subscripts refer to the
maximum wall surface temperature and core inlet pressure.
neutron
kinetics
dt
precursors
n
n
dc
dt
MC T
temperature
reactivity
(3-5)
+
dT
K 1 n - K2 P
T
M
"P
c
e
HT
t
desired control
rod reactivity
(JY
I - G
dt
')
s0
control rod
delay
pressure,
bleed turbine
pressure,
topping turbine (1)
-0
dt
I
A
fX0
d P
dt
-
Id
2K ~dt
-
/C
K4 VP /T
P)
V )-
()
K
6
a
P /-'T
K
P
5 /-
-
2
K7P2
P/
-39-
I
2K
pressure,
topping turbine (2)
d
dt
P)
V
2
V2 P/'
K
- K
8
P.
/
9
t
desired valve
V
setting
(Px - P)
-MG2
P)
dt + G2 (Px
0
valve delay
TV
dV
dt
V
x
V
The above equations are scaled by the following substitution of variables:
n
k
-
T
n
k
-
n
o
T
n
*
T
*
P
-
k , C
-
k P P
P 0
(0 k//
T
-
V
t
x
k
-k
-
To T
T
x
*
V V
V
k
C
(3-54)
*
Vxrn
ke
0
IMV
kyV
r f
*
V V
V*
t
/t
The zero subscripts ( n0
variables.
C
etc.,) denote steady state values of the
After introducing (3-54)
into (3-55),
its corresponding steady state term.
each term is divided by
Those terms which contain a time
derivative are divided by whichever steady state term forms the most
convenient time constant.
dn*
neutron
kinetics
*
dt
d C,*
dt
kk
Sn
t
kkt
n
ei
i
-k
/t
n
k
-kt
L
n
kt
k
n
C(
*
.7
i.
- 7)
A
temperature
T
12
*
X
dT*
np
n
t
kq
t
*
reactivity
*
*
9
P
4A
kp
+
k, G,'
/To
-
~0
p
k
kT
To
T
t
*
k kt
k
desired control
rod reactivity
x
control rod
delay
d t
1/
*
kt
-oe
(9 x
-
)dt
*
/Oce
dt*
pressure,
bleed turbine
P
dt
p
dt*
P
-
kgk
P
V*-
11
*9*
G*
kk
*
pressure,
topping turbine (1)
dt
*
pressure,
topping turbine (2)
-tptp
kvktkq P* 6
V
3
**
dt
*
*2
kk
kL
(V)
k~kk P e
P
k
V
t
desired valve
setting
kt k
kV
*
G2Po
(P
*
P )dt
-
0
0
k
k
valve delay
OrvdV
dt
-
k t (V
G3P0(P~
V
0
toV)
-
P)
*
+
*
*2
*
*
-41where
^
_TO
TO
. MC
T
K2
and K2Po
Q
PO
0~'
MC
K2
Tavg
T0
7/OV
P0
total power
=
I P
2K K P
p 5 0
2K
p 5
2
K5
The time constants,
P
0
2
K7 P0
7
T and
conditions in Appendix I.
K
P0
2
K9PO0
p, are calculated from design point
Since they are proportional to the ratio'
they can also be calculated for any steady state condition.
the scaling constants
(kn>P
, etc.) are set equal to one.
For analysis
For analog
computer simulation, they are assigned a variety of values, depending on
the desired range of each corresponding variable.
which appear in (3-57) are shown in Table 3.
Values of all constants
TABLE III
List of Coefficients and Constants
T1hrust
1,500,000 lb.
Specific impulse
640 sec.
Mass flow rate
2300 lb/sec
Core size
5 ft. (diam.),
Total power
25,000 m w
Power density
12 kw/cm3
Void coefficient
30%
Core weight
9700 1b.
Reflector weight
8000 lb.
Total propellant weight for
300 second of operation
700,000 lb.
Mechanical inertia of turbopump
62
Pump speed
8,000 RPM
Length of coolant channel
5 ft.
Diameter of coolant channel
1/4 inch
Friction factor in coolant channel
.005
1MNeer of coolgat channels
17,000
Marium core temperature
5000*R
Core exit stagnation temperature
3600*R
Core inlet stagnation temperature (BT)*
100*R
Core inlet stagnation temperature (TT*)
45oR
Core inlet stagnation pressure
Core outlet stagnation pressure
Pressure ratio across BT
Pressure ratio across TT
*(BT) refers to bleed turbine.
(TT) refers to topping turbine.
lb ft sec 2
1500 psi
900 psi
50
1.1
5 ft(length)
-42aTable III (concluded)
Core exit Mach number
o.62
Core entrance Mach number (BT)
0.05
Core entrance Mach number (TT)
0.115
Buckling
2 x 10-3 cm-2
Thermal utilimtion (±f
1
2.10
7
Resonace escape (p)
Fast effect
Age
(E )
1
252 em2
( 7)
Diffusion length (L
16 cm
Neutron lifetime (4)
10
Precursor yield (ft)
.005
Precursor yielA, group 1
.0025
Precursor yield, group 2
.0025
Decay constant, group 1
.046 seec1
Decay constant, group 2
.742 sec
Density - reactivity coefficient (..f
)
Therml time constant (
Pressure time constant
(
Control rod time constant
Valve time constant ( T)
)
- l
.3
R-l/2
*R/psi
0 .55 see
2.3 see
/p)
(
)
1
0.1 sec-1
Decay constant, one group approximation
Bare core - reactivity coefficient (-o(4
see
7)
0.2 see
0.2 see
-043SECTION IV:
A.
ANALYSIS OF THE DYNAMIC EQUATIONS
Open Loop Stability
Open loop refers to the dynamic behavior of the engine when
controls are inoperative (i.e. ,
Since the
and V are constant in time).
power level can change dangerously fast in a nuclear reactor system, it is
a necessity that the engine be stable without the use of control mechanisms.
In order to investigate open loop stability, a linear model, based on the
previously derived, non-linear equations,
is proposed.
formation is applied to the linear equations.
The LaPlace trans-
Routh's criteria and the
root locus technique are then applied to the transformed equations in order
to determine the root location of the determinant of the coefficient matrix.
The system is defined as stable if all roots lie in the left half of the
complex frequency plane.
If a root occurs at the origin, the system is
defined as stable provided the root is of first order.
still
The condition under which the open loop system is stable is shown
to have physical significance and to be reducible to a simple criterion.
Development of Linear Equations
1.
The following substitutions are made in equations (3-57).
1(4-1)
k
nn
n
=k
ci
n
n0
n+n
no
-
n0
no
_
non-n
-
n0
+
+ n*
no1
n0
similarly
C
=
1 + C
-
1 + T
*
T
*
T+T*
S
*
P
-
0 +
-
1 + P
-
1 + P
-
1 + V
-
1+V
*
P
*
0 +
/4=
0+/Oc*
V
*
*
-44-
into (3-57),
After substitution of (4-1)
= y
=
The definition of open loop implies that
= V
=
terms of order greater than one
are neglected. (i.e. Second order terms such asjo
n
Therefore,
parison to first order terms such as n* )
are neglected in com-
the analysis is
This
applicable only for small variations from steady state operation.
technique is
0.
standard and is presented in detail by Newton.(19)
The fol-
lovwing linear equations result:
dn*
(4-2)
dt
*
dC
-
CC
n*
dt
Tj*
-
dT
*-
*
7'dt
Hk1
+
-
-2
T*
*
+
P,
+ fc
d /0
c
//lx
dt
/OC*
t
-
(TX* - T*) dt
T
G 2/?
0
p dt
=
TT
-
P
V*
P
+ V* +
(bleed turbine)
dV*' (topping turbine, valve
before turbine)
P
dV*
P dt
-
T*
P* + 3V* + 7p
dt
(topping turbine, valve
after turbine)
-45-'
dV*
V dtx
*
t
G2PO
VX
(P *
P*) dt +
G3P
30(P
20
If
V,
=
- P)
0
0, which is in accordance with the definition of the open loop,
the three pressure equations of (4-2) are equivalent, and the analysis of
the open loop is applicable to all systems considered.
2.
Elimination of the Precursor Equation
Gyptopoulos and Devooght(27,2 8 ) have shown that if a nuclear
reactor system is stable with all neutrons emitted promptly, the system is
stable with delayed neutrons.
Since we are presently concerned with overall
stability rather than response, we may advantageously apply the above statement.
The analysis is simplified by eliminating the precursor equation and
replacing the neutron density equation by
(4-3)
dn*
(See Reference 22, Chapter 10,
for the derivation of the above equation.)
The following definitions are made to simplify the notation:
--
7-6
(4-4)
n
o(cT
0 + O H P0
2/
TO
0
CH PO
T
O
GITo
G1 6
G2
V0
.
0(
(o
*
Gl
0
G2
*
G3 P 0
V
0
*
=
3
-046Reactivity,
neutron yield,
, is scaled in relation to the fractional delayed
, which appears in
'
,
.
, and
This is not
a violation of the hypothesis that all neutrons are emitted promptly since
could. be canceled from each equation in which the above constants
appear.
If the resulting equations are stable, we conclude that the open
loop ro cket system is stable for small perturbations from steady state
operati on.
The open loop equations are rewritten below.
*n
n
n
(4-5)
dt
/1*
dTr
-
T
cit*
p
-- -dt
i
dP*
7
-P
T*
P
*
T*
*
-
+
P
If the bare core reactivity coefficient is negative, each constant which
appears in (4-5)
3.
is positive.
Stability Analysis of the Open Loop by means of the LaPlace
Transformation
The LaPlace transformation of equations (4-5)
'M
T
~ 7Am
P
(4-6)
n
S
/
is
S + 1-)
-
2+
T
-47where
-St
E=
0e
n* (t)
CC
dt
n (s)
etc.
This system of equations can be rewritten in matrix notation.(23)
s '
0
-i
(rs +
0
-1
0
0
-1
n
perturbation
) 1
0
T
vector
T s + 1)0
P
T
CMO<P
(4.7)
-
The roots of the determinant of the coefficient matrix are the denominators
of the partial fraction expansion of a transfer function used to describe
any perturbation of the above variables.
The determinant of the coefficient
matrix, set equal to zero, is
53 (
S
T
p
S2
+
n )
+1/
r2,n 7T + 1/'/
^n), + S (3/27 +
7~p) +
(4-8)
( (p
+
If o(r-
0
p is greater than zero, the roots of the above polynomial lie in
the left half plane.
The proof of this statement is contained in Appendix VI
and follows from the application of Routh's criterion.
the definitions of v(7 and
of,
is greater than zero provided
It can be seen from
as given in equations (4-4) that cy - "{,
6(c is positive.
Since o(7
is preceded
by a negative sign in the formulation of the reactivity equation, the
stability criterion can be stated as follows:
If the rate of change of
reactivity with temperature for constant hydrogen density is negative, the
open loop system is stable.
It is convenient that the open loop stability
of the bleed and topping turbine, nuclear rocket engines should rest
entirely on a condition as simple as this.
-48It
would seem possible that inclusion of the delayed neutrons in
the formation of the transfer function would result in a less restrictive
The above analysis was repeated with the
condition for overall stability.
addition of one group of delayed neutrons, but the result is the same.
4.
A Physical Basis for the Stability Criterion
Investigation of the steady state characteristics of the engine
yields the same criterion for stability as that of the above technique.
Examination of the non-linear, open loop, pressure equation of (3-57)
indicates that the time rate of change of system pressure is zero if
The power level is constant in time if the open loop reactivity,
T* = P*
which is
a function only of pressure and temperature,
is
zero.
Therefore,
the states at which the power level remains constant is along a line in the
T*, P* plane, described by the equation
c
*
H
/PT
O
0
P
T*
This line is a boundary between regions of supercriticality and subcriticality.
Intersection of the zero reactivity line with the constant pressure
line is a point of steady state operation.
If any movement in pressure and
temperature away from this point is returned to the intersection, the system
is
stable.
removed,
Conversely,
the system is
if
any movement away from steady state is
further
unstable.
Two gossible configurations exist at the point of intersection.
T
The slope,
""*
, of the turbopump (constant pressure) line can be greater
dP
or less than the line of zero reactivity.
shown in Figure 4.
These two configurations are
In Case I, a slight increase of temperature and pressure
along the turbopump line moves the point of operation into a zone of
49
CASE
STABLE
turbopump steadystate line
. zero reactivity
-state
operation
perturbations
to steady-state
CASE U
( el*/
el,)pO(
A**/
(
,*
)pto
UN STABLE
reactivity
steady-state line
operation
small perturbations
are divergent
FIG. 4
TEMPERATURE - PRESSURE
PL AN E
-50subcriticality in which the higher pressure and temperature cannot be
Consequently, operation must return to the point of inter-
maintained.
Similarly, a movement to lower pressure and temperature is into
section.
a zone of supercriticality where the pressure and temperature increase, and
the point of operation returns to the steady state intersection.
The same
result occurs for any movement away from the point of intersection.
In Case II, movement towards higher pressure and temperature is
into the zone of supercriticality, where the pressure and temperature
further increase, and is therefore an unstable situation.
A decrease in
pressure and temperature causes the reactor power to go to zero which is
also an unstable situation.
The criterion for stability formed from these considerations can
be expressed by the following inequality:
(4-9)
The left
hand term is
=0
-0
P
the slope of the constant pressure line, while the
right hand term is the slope of the zero reactivity line.
term must be greater if
is
the stable situation, depicted in Case I of Figure 4,
is calculated by setting the time rate of
to exist.
*
change of
P
The left hand
d;P
P.
= 0
equal to zero and performing the indicated differentiation
of the closed loop pressure equation.
This yields
(4-10)
( T
P
=o
To compute the right hand term of (4-9),
zero in the reactivity equation of (3-57)
and
are set equal to
and the differentiation executed.
-51Since the slope at the steady state intersection is desired', P*
and
T*,
which occur in the expression for the slope of the reactivity line, are set
equal to one, their steady state value.
/<
T-P *T) 0
\P
3/2
'
*
T -P
*2
O<1H
The inequality of (4-9) is satisfied if o{
9
P0
is a positive constant, which
is the same criterion as derived from the LaPlace transform technique.
The quantity
To
4
is a measure of the stability
(H P
If 4
of the system.
(metastable).
if 4
>
<
1, the system is on the verge of instability
Accurate and fast controls are necessary. On the other hand.,
1, the system is very safe and less sophisticated controls are
In order to express
satisfactory.
4
as a function of the usual bare core
temperature coefficient which is correlated with temperature rather than
the squaare root of temperature, the following substitution is made:
c/
where
for constant hydrogen density.
of
With this substitution
2
O(H
P0
-52-
For the design chosen
equals 0.4 at ftll
6
power which is
intermediate between the condition of very safe and metastable.
a
In Figure 5, states of constant
a good control system is necessary.
in the temperature - pressure plane are presented.
With exception to
startup from a suberitical core to the idle condition, 4
greater than 0.1.
Certainly,
is always
The exception is investigated by means of an analog
computer, and the results shown in a later section.
A More General Statement of the Stability Criterion
5.
It
has been tacitly assmd throughout the derivation of the
open loop stability criterion that the reactivity coefficients
and
Org were positive constants.
4
C
A useful stability criterion can
be developed with less restrictive assumptions concerning temperature and
pressure reactivity feedback.
- * *C
+
A more general formulation is given below:
*
f (T)+g(P/T
P* /*
(
f and g represent general functions of their respective variables.
*
use of T
The
*
and P* rather than T and P is in no way restrictive since T
can always be replaced by
T
(ie . To T
A similar operation replaces P by P .
A more general formlation than (4-14) would lose the physical
significance of the phenomenon that is described by the equation.
f
(T )
refers to the variation of the reactivity with temperature
for constant hydrogen density in the core, while
g (P */T )
describes the variation of reactivity for changes in hydrogen density
at constant core temperature.
0
3 1000-
0Q
METASTABLE
REGION
10 0
1
10
I
Pressure
FIG. 5
STABILITY
I||
I
100
l
I
l
I
I
1000
(PSI)
MARGIN IN TEMPERATURE-
PRESSURE
PLANE
I
In order to transform the more general reactivity equation
into a form compatible with the method of LaPlaces tran'sforms, we
must express reactivity as a linear function of temperature and
is set equal to zero and the equation
To do this,
pressure.
is expressed in differential form in order to investigate small
deviations from steady state.
*
*
+
(4-15)
T
*
*
are easily calculated.
and
T
P
(4-16)
df *
T
\**
*
dT
* 2
(T*)
*
d(P*/T*)
*
SP*
d(P*/T)
T
(4-17)
Since investigation of small deviations from steady state is desired,
are set equal to one.
y *
and
T *
The following definitions
are introduced in order to simplify the notation:
f1
- df
dT'
g1 -(
-
d(P /T )
-P
)
f(14-18)
I
-l
f
T
(2,-19)
T
-P
-(1
The differential term are replaced by the previous notation. (i.e.
*
*
-A
-55The linear equation (4-15) can now be written in the following
simplified fashion:
The LaPlace transformation of (4-20) is substituted into the coefficient
matrix of (4-7).
f (T*)
and
It has been assumed that the reactivity functions
g ( */T. )
are not functions of time; consequently, they
remain unchanged under the transformation.
Expansion of the new
coefficient matrix yields the following polynomial in s:
(4-20)
If the system is to be stable, all coefficients of s must be of the sam
sign.
We are then led to the immediate conclusion that
/
/
(4-.22)
z2z
Further restrictions of stability exist.
The application of
Routh's technique yields the following inequality:
3
(4-23)
-56If g' is assigned a valne of -
-"
2 '"0*
+
f , as indicated in the
Ineguality of (4-22), and substituteJ into the inequality of (4-23),
it can be seen that satisfaction of (4-23) implies satisfaction of
(4-22) provided the inequality of (4-21) is satisfied.
A more general criterion of stability can now be stated.
(a) The rate of chage of reactivity with temperature at constant
hydrogen density mst be negstive.
This conclusion was stated
previously in part 3 although it could be interpreted as a violation
of the tacit asmption of a constant
CO( .
(b) The rate of change
of reactivity with hydrogen density at constant core temperature should
be positive.
Only slight negative values can be tolerated.
The exact
amount of negative density feedback which can be tolerated is given
by (4-23).
Some physical basis for the latter condition can be seen
by examination of the temperature-pressure plane presented previously
in Fige 4.
-Negative density-reactivity feedback reverses the fields
of sub- and supericality
for zero
.
Application of the some
reasoning as presented in part 4 indicates that instability is likely
under these conditions even though temperature feedback at constant
hydrogen density is neative.
However, the likelihood of negative
hydrogen density-feedback is remote.
Throughout the rest of the thesis,
the assumption is made that only positive density-reactivity feedback
exists.
More general statements can also be made concerning the
open loop temperature *ad pressure equations.
*
dT*
*
IF (n , P ,T
*
)
-57-
(4-25)
The following restrictions must be made on the functions F and G.
(4-26)
1._
(4-27)
(4-26)
(4-29)
0
.& .
(4-3o)
<
These restrictions are entirely consistent with expected rocket engine
behavior.
(4-24) and (4-25) are expressed in differential form where
dn*, dT*, dP*
are replaced by n , T,
*
P
**
(4-31)
__p7.
_
-;
-.
(4-32)
'
For small deviations from steady state, the partial derivatives which
appear in (4-31) and (4-32) are defined as constant.
by
and (4-32) by
Division of (4-31)
yields
(4-33)
(4-34)
where
2-
-Y
4
07R
CT
-58-
Each coefficient is positive provided the restrictions of (4-26) through
(4-30) are upheld.
The LaPlace transform of (4-33) and (4-34) are sub-
stituted in the coefficient matrix of (4-7) in place of the previous
temperature and pressure equations.
Expansion of the new determinent
yields the following polynomial:
(4-35)
f1 < 0
It is assumed that
and
g ) 0
Consequently, the roots of
the above polynomial lie in the left half plane if
>
The quantity
'
G,
/
/
7
(4-36)
is merely the reciprocal of the slope of the
turbopump line in the temperature-pressure plane for zero time rate of
change of pressure and is defined as R.
easily seen.
The physical meaning of (4-36) is
The open loop pressure equation derived previously predicted
that R was always eqtual to one, and there is good reason to believe that
this is the case.
Hoever, the more general formilation above indicates
that the system will remain stable at all points of steady state operation
where the slope of the turbopump line exceeds the slope of zero reactivity
line.
This is the same conclusion as before.
The only generalization that
needs to be made over the previous statement is to recognize the possibility
that the slope of the turbopmp line need not be exactly one in the T*, P*
plane. A new parameter, z ' , which measures the stability of the system
is defined below.
-59-
(4-37)
1)
The same conditions that applied to
(i.e.
4
'
>
<
/
I
dA
can now be applied to
z
implies a metastable situation, while
implies a very safe situation.)
It should be noticed that the above derivations are based
on a linear approximation of the dynamtic equations.
only apply to small deviations from steady state.
The results
The stability
theorems of non-linear dynamics are difficult to apply to a system
such as the rocket engine.
Analysis of the non-linear equations is
performed with the aid of an analog computer.
-60B.
Open Loop Response
1.
Location of Roots
Although the rocket engine is stable without controls, it
have satisfactory response characteristics as well.
nst
Examination of root
location is helpful in determining the response, and is accomplished by
applying the root locus technique, as described by Truxal. 24)
The delayed neutrons effect system response.
Consequently, the
LaPlace transform of the one group precursor equation is included in
With this addition, the determinant of the coefficient
equations (4-6).
matrix, set equal to zero is
1/ 'S
62~5
C4 3
a
0-
L-
(4-38)
.
where
171 Z.
7;07;
=
Z~
~
~~7-
QI =
):, (C-e, - C;
, ) * 0e, -,- * ./ -,- -0'/Z -;:/
X
average decay constant for the one group precursor approximation.
The conventional nuclear reactor transfer function contains the
ratio of steady state neutron density to neutron lifetime,
usually the only coefficient dependent on power level.
-.
This is
The rocket reactor
transfer function is more complicated and has a number of coefficients that
vary with changes in power level.
(
'
V((
)
Furthermore,
as a result of the scaling tchnique described in Section III, the coefficient that is a function of neutron lifetime,
steady state neutron density (or power level).
difficulty, three root loci are presented.
first is
,
is not dependent on the
In order to circumvent the
(See Figures 6, 7, and 8.)
The
a graphical presentation of the paths that the roots describe as
is
varied from zero to infinity with the system operating-at an
idling condition of T = 1000*R and p = 300 psi.
The second Is a sinqilar
presentation with the system at full power (T = 5000*R and p = 1500 Psi)The third, Figure 8, graphically presents the variation of root location as
the power level rises.
Since both To and P, increase as the power level
rises, a restrictive relationship between the two steady state values is
needed in order that only one path exist for each root.
The ratio of steady
state pressure to temperature remains constant during open laep operation.
Conseguently, Figure 8 depicts the variation of roots as the power level
increases with the restriction that the ratio of pressure to temperature
remains constant .
situation.
The root locus technique is not applicable in this
The location of the roots must be rather laboriously calculated
for each given value of pressure and temperature.
Only the range of
interest is investigated, rather than the usual range from zero to infinite
power.
30 i
0.6 i
20i
0.4 i
10 i
0.2i
-0
=O~sec.
M
(=l-2s ec.
-30
-20
-10
-0.2
-0.4
-0.2 i
-10 i
-20 i
-0.41
x
-0.61
-30i
FIG. 6
ROOT LOCUS AT
IDLE CONDITION AS A FUNCTION
OF Tn
40 i
--4 0. 8 i
x
fu II'
power
=1
20i
idle
condition
x
-10.4 i
/
-
-20
-0.
(~)
-Q4I
-0.8
id le
condition
fu I l
power
x
20 i
I
x
-40i
FIG. 7
ROOT LOCUS AT FULL POWER AS A FUNCTION
OF
Tn
- -0.4 i
-H --0.8 i
60 i
0.3 i
P= 3000 PSI
40i
0.2 i
T
20i
T= 10,000* R
1000* R
0.1i
T = 10000 R
P= 300 PSI
P = 300 PSI
-60
-40
-20
-0.1
10, 000 * R
P = 3000 PSI
-20i
FIG. 8
ROOT LOCUS
-0.1i
-40 i
0.21
oi
-0.3i
AS A FUNCTION
OF
POWER
LEVEL
-65A fourth root locus, a function of c( T, is
included since the
previously derived stability criterion is heavily dependent on this variable.
(See Figure 9).
Root loci which are functions of the temperature and pressure time
constants are presented in Figures 10 and 11.
They are included in order
to understand the dynamic change to the system caused by their variation.
2.
Predicftion of Open Loop Response
The term in the time domain, corresponding to the root of the
transfer function lying farthest to the, ightin
s-plane,
-the'complex
dominates after a long period of time following a perturbation.
If the system is stable, this term decays exponentially in time.
The recip-
rocal of the real part of the root is indicative of the time necessary for
the system to reach a new steady state following the perturbation.
The
above has been effectively stated by Truxal, "Clearly, the settling time is
directly related to the largest significant time constant in the step
function response."
He has defined the settling time as "the time required
for the oscillation of the response to decrease to less than a specified
percentage of the final value.
criteria."
Five per cent or two per cent are common
(See Reference 24, page 80.)
One should recognize that there
is no one-to-one correspondence between the frequency and time domains, but
certain trends and indications can be inferred from one concerning the other.
In order to discuss the response of a system in the time domain
by considering the location of the roots in the frequency domain, the
concept of damping is required.
complex root is
The usual evaluation of the damping of a
the cosine of the angle between the negative real axis and
the vector from the origin to the root.
If one considers the inverse
LaPlace transform of a partial fraction whose root is complex, the concept
of damping is obvious.
Further explanation can be found in Reference 24.
-66It
can be seen: from Figures 6, 7, and 8 that the dominatig root
off the open loop system lies on the negative real axis and has an absolute
value in the range between 0.02 and 0.10 sec.
.
Consequently, the rocket
system is expected to reach a new steady state in a period of time of
This is a slow response and should present
aprximately 10 to 50 seconds.
few problems of control.
One might expect that the sluggishness would
limit the power level at vwhich the reactor remains stable.
However,
it has
teen shown in subsection A that the system is stable at any power level.
Althougha stable at high power, the system is more difficult to
control.
Damping of the complex roots is
is greater at higher power.
less while the speed off response
(See Figure 8.)
The phenomenon of faster
response at higher power level can be found in heat exchanger dynamics.(
3
Since the rocket core can be compared to a high power density heat exchanger,
the phenomenon is not unexpected.
The actual problem of control is best
studiAed by analog simulation and is presented in later sections.
The sluggish asymptotic response does not precluxde the presence
of rapid transients.
High frequency roots exist.
Pulses or oscillations
of the order of hundred2ths of a second are possible, but the damping is
sufficient to prevent dangerous oscillatory behavior.
can be noted from the root loci of Figures 6 and 7 that
It
iirease of the effective neutron lifetime beyond the calculated value of
10
seconds has an unfavorable effect on the response.
impoosibly long lifetimes ( />
10-2 seconds),
With exception to
damping of the complex roots
e.ecreeses while the speed of response is only slightly changed.
ing for
values of
=
/
0-3 see.
is permissible, and it
The damp-
is unlikely that larger
will be encountered in a rocket reactor system.
A2.though the coefficient varied in Figures 6 and 7 is
(i.e.
), the precursor yield fraction must be considered as
asymptotic root locus
i
aT= 19 (calculated
value)
20 i
0.2i
.0.
1i
10 i
aT ( a
.-
-40
-50
-0.2
-30
-0.1
0.1
ay
aT = a Poo
FIG. 9
ROOT
LOCUS
AT IDLE CONDITION
-101
- 0.1 i
-20i
-0.21
A S A FUNCTION
OF
aT
.12 i
+60 i
Locus is a
TT
+
circle with
radius at
s =-2060
at poles (x)
-
+40i
-
.08 i
-
.04 i
Design point roots
TT= Isec.
4
Zero at s
- +20 i
= -2060
-60
-4
-20
-. 12
Design point
roots
-. 08
.0
.04 i
-20 i
TT = 1OO sec.
- 40i
--60 i
FIG. 10
ROOT
LOCUS AS A
FUNCTION
OF
TT
--.
08 i
- -. 12 i
design
point
root
+ oat poles (x)
-
-10.08 i
40 i
--120 i
from pole at s=-3.6
-4 0.04 i
0%
%.0
-00
-40
-20
-0.08
root
LOCUS AS A FUNCTION
OF
-0.04 i
-- J -0.08 i
-40i
ROOT
0.04/
design point
-20 i
FIG. I
-
Tp
-70constant since it also appears in other coefficients which, for the moment,
are assumed invariant .
The root locus as a function of the temperature coefficient
(Figre 9) yielas little additional information.
mentioned earlier, is again demonstrated.
half plane for of,
< f, ).
The stability criterion,
(i.e. A root occurs in the right
Poorly damped oscillations occur at high
values of a(r , but such values are unlikely.
The root locus for variation of the thermal time constant is
significant.
(See Figae:'e 10).
At the design point, the two roots lying
closest to the origin are near the zeros of the root locus.
Further reduc-
tion of the thermal time constant from the calculated value would not
change the position of these roots significantly.
TT
However, reduction of
would seriously change the position of the two other roots lying at
s = 25 -
20 1.
A decreased
r T would decrease the damping of these roots
and. in.crease the initial oscillations of the response.
An interesting conclusion can be drawn.
An increase in the value
of the thermal time constant, which is proportional to the thermal inertia,
improves the system response in two ways.
(a) It increases the damping of
the complex roots lying farthest from the origin.
(b) It moves the domina.nt
root away from the origin, and thereby reduces the settling time of the
system.
This point is somewhat academic since an increase of one hundred
is needed to double the
Obsolufte value of the dominant root.
There is no advantage in system response to be gained by keeping
the thermal inertia below a certain point which is analogous to the point
of critical damping.
Since the thermal time constant of the rocket engine
is a factor of one hu&drd below this point, the system should be insensitive to charge in its value, except for increased short term oscillations
which accompany a reduction of the time constant.
-71Since this phenomenon is unexpected it
is well to examine a
simpler system where the same phenomenon occurs.
Consider a reactor with
no delayed neutrons, independent of pressure for either cooling or reactivity feedback, and with negative temperature feedback. The system of equations needed to describe the kinetics of this system are presented below.
dncn
dt
(
If
-
an -h T
I'lC. T
dt
-
fT
+
constant
these equations are scaled and linearized as before, we obtain
dn
-
*
dt
dT*
2 ~j~-
-~
,0~
where
n,
g.J)
T
O( T,
-
41
2.
=
m
thermal inertia.
The equations can be combined by eliminating
Le~7/
wr
7A,
n * and ,,0.
9
-72-
It
is readily apparent that
71 in this system is completely analogous to
mechanical inertia which would appear in the differential equation of a
mass on a spring with linear damping.
Values of
r2
The condition of critical damping is
give a non-oscillatory and slower response.
less than
(i.e. The settling time is greater.)
applied to equations (4-40) or (4-41),
If the LaPlace transformation is
the root locus for variation of
72
is qualitativel"y the same as the corresponding root locus for the open loop
rocket system and is
presented in
Figure 12.
Consideration of the simpler reactor system indicates that
reduction of thermal inertia or the thermal time constant beyond a point of
critical damping does not improve the response.
Since the rocket reactor
is well below that point, further reduction offers no dynamic improvement
and leads to high frequency oscillation.
The final root locus for the open loop system is a function of
the pressure time constant.
In this case, the variation is more in accord
As
is decreased the dominant root moves away
with intuitive thought,
from the origin.
Consequently, the settling time is reduced.
The same
variation has little effect on the damping of the complex roots farthest
from the origin.
We can conclude that the dynamic performance of the rocket
improves as the pressure time constant is decreased.
3.
Analog Simulation of Open Loop Response
Although the root locus technique is suitable to evaluate the
partial fraction denominators of the transfer function, the numerators,
which depend upon the specific perturbation imposed on the system, remain
unknown.
The added information obtained by their evaluation for a variety
T2 -,00
at poles (x)
T2 =
(critical damping)
-T2= 0
IA
-
FIG. 12
a / T-,
ROOT LOCUS AS A FUNCTION OF THERMAL
FOR
A SIMPLE
REACTOR
T= oo
SYSTEM
INERTIA (TC2)
c14
-74of perturbations and system coefficients is not justified.
Recourse is
made to the analog computer in order to study the system response for a
variety of conditions without the restriction of linear equations.
Simulation was performed on a Philbrick Analog Computer.
A photograph arid description of the computer is contained in Appendix VII.
Figures 13 and 14 present the flow chart or wiring diagram used for programming the computer. Table 5 gives a list of the multiplicative constants
and an explanation of component symbolism.
An excellent presentation of
analog computer construction is given in Reference 30; an explanation of
its applications is presented in Reference 31.
In order to perturb -the system, the reactivity is changed instantaneously (step change) from zero to 27, which is a factor of four greater
than that needed for prompt criticality.
An input of reactivity of 27 with
the rocket operating at full power and without control mechanisms is
sufficient to melt the core.
This can be calculated by consideration of
the new steady state that would be attained if
the equations were applicable.
The point of the large perturbation of the open loop is not to simulate an
expected event at fu2.l power, but to impose a severe test on the system.
If
the response shows no dangerous oscillations or overshoots, we conclude
that the open loop response will be safe for the reactivity changes that
are expected.
The same philosophy is applied in choosing a step change of
reactivity rather than less drastic and more practical reactivity inputs.
The severity of the perturbation is sufficient to excite the non-linear
terms, and furnishes a decisive test of open loop response.
temperature,
15B., and 15C.
The effect on
pressure, and neutron density is presented in Figures 15A,
9*
PRESSURE
P*
PRESSURE
CONTROL
OPEN
FIG. 13
GENERAL
PRESSURE
KIN E T IC S
I
LOOP
ANALOG
BOUNDARY
FLOW
CHART
NEUTRON AND TEMPERATURE KINETICS
al)
P
PRESSURE
FIG. 14 DETAILED ANALOG FLOW CHART
KINETICS
77
+
ELEMENT
INTEGRATION
* SUMMATION
ELEMENT
MULTIPLICATION
DIVISION
TABLE
5
5
ELEMENT
ELEMENT
-78
-
r
AK
v
_
l
/4~~
_
"<,
f"'4
"7#"
d6<
=
~1
/3
C1,
O~,2.
t<ldf a
k~
413
~
44
Lt
="~-Alt
06
r
V
/
7 v
&/69
e~ a;I~
I
A. TEMPERATURE
2 To
RESPONSE
B. PRESSURE
2Po k-
Po
To
0
10
20
0
30
10
sec
2.0
3.0
4no
3no
2no
2no
0
30
RESPONSE
3no
-J
20
sec
C. POWER DENSITY
(4 = IO-4sec)
4no
no
RESPONSE
It
no
1.0
sec
2.0
FIG. 15 OPEN
3.0
LOOP
0
RESPONSE
1.0
sec
-80Discussion of Open Loop Simulation
4.
The neutron density exhibits a sharp pulse as a result of the
step change of reactivity, but it
its
guickly returns to a value near that of
previous steady state and then rises slowly to the new steady state.
The burst causes a pulse in the temperature response,
but is
less than the eventual steady state value.
which is
significant
Pressure rises slowly,
with no noticeable short term transients, to a new level.
The result is
encouraging and indicates that the open loop dynamics of the ruclear rocket
will not present an insuperable problem to its eventual operation.
The safe response which follows step inputs of reactivity greater
than prompt criticality is primarily a result of the system's inherent
ability to reduce the reactivity quickly, which is accomplished by negative
reactivity feedback.
This is attributed to the following reasons: (a) Rapid
temperature response.
For large changes in power density, the heat removal
term of the temperature equation may be neglected during the initial
transient.
Temperature then responds as the product of the reciprocal
thermal time constant multiplied by the integral in time of the power
density.
Since the time constant is much smaller than that of conventional
graphite-uranium reactors and the change in power density is large, the
temperature rises quickly.
Fortunately, the process of integration reduces
the severity of the response.
(b) Slow pressure response.
occurs in the pressure response.
The same effect
Since the temperature rise is rapid, the
initial pressure increase may be approximated by the product of the reciprocal pressure time constant and the integral in time of the temperature.
The initial pressure response is less severe than the temperature since
the integration process again takes place and the time constant associated
with the turbopump is larger than the one associated with thermal lag.
-81-
(c)
Negative contributions of reactivity-density feedback.
A substantial
part of the negative reactivity-temperature feedback is contriurted by
change in hydrogen density.
Since pressure rises slowly, its positive
contribution to reactivity is insignificant during the initial transient.
The sudden cha:nge in temperature causes a drop in reactivity by increasing
the thermal diffi.sion length in the carbon-uranium matrix and, more significazntly, by reducing the amou=nt of hydrogen moderator in the core.
Thus the
supposedly unstabilizing influence of density-reactivity feedback improves
the short term transient of the open loop.
The open. loop stability criterion was verified by computer simu-
lation.
The system diverged if the bare dore reactivity coefficient was
positive and remained stable if it was negative.
Graphical presentation
of this is unnecessary an2 is not included.
5.
Variations of Open Loop Response
Open loop simlation was repeated using a value of neutron life-
time equ-al to 10-3 sec., a factor of ten greater than the calculated value.
The resvult is presented in Figure 15D.
As predicted by the root locus of
Figures 6 or 7, the system became more oscillatory.
The frequency predicted
by the linear model is 1.8 cycles per second (cps); that calculated from
the graph is
The agreement is excellent if
2.0 cps.
one considers the size
of the perturbation and the non-linearity of the simulated system.
Although
the short term trazsent was changed, the overall effect on temperature and
pressure response was insignificant.
that variation of
origin.
I
It has been shown in the root loci
does not change the position of the roots near the
Consequentl1y,
it
is
expected that the long term system response
should be relatively Lnsensitive to changes in the value of neutron lifetime.
-82The precursor yield f'actions
/
and
were increased
to their experimentally rieasured values and then decreased to 1/4 of the
measured value.
In each simulation the reactivity input was two per cent.
Thus, the reactor was prompt critical, and the original neutron density
change did not depen
contribut ions from the delayed neutron precursors.
o'on
For this reason, variation of
effect.
If
/
1,1
2Y
and/d caused no significant
the delayed neutrons were neglected completely, the response
would certainly be different, but this situation would not be realistic.
Variation of the precursor group decay constants,
over an order of magitude also had little
given in
.
and
a2
effect for the same reasons as
the above paragraph.
Variation of C. H altered the height of the temperature and
neutron density pjlses, but had no other significant effect.
The change in
pulse height is expected since the speed of negative reactivity feedback
depends on the reactivity coefficients.
Variation of O( c did not change
the pulse heights as significantly since its contribution to negative
reactivity-temperature feedback is less.
Its variation did change the
eventual steady state values of the pressure and temperature.
is easily explained.
The variation
If the valve is unmoved, the ratio of pressure to
temperature ust be the same at the initial
and final steady states.
can be seen by investigation of the open loop pressure equation.
This
Since
reactivity-density feedback is proportional to the ratio of pressure to
temperature, variations ofO( H cause no change in the eventkal steady state.
This is not the case with the bare core-reactivity feedback.
in
0(,
should cause a
Thus, a change
hange in the final steady state although the final
pressure to temper'ature ratio remains the sane.
Increase aznd decrease of the thermal time constant by a factor
of five yielded a response that was in good agreement with the predictions
-83made from consideration of the root locus for variation of
iLcreased value of
.
An
caused no visible change in either the short term
or long term response, but a decreased value caused a noticeable change in
the initial neutron density transient although the long term response
remained uneffected.
To a lesser extent, the initial variation could be
noticed in the temperature.
(It has been pointed out that the temperature
response is less severe than the neutron density response.)
Figure 15D is
a presentation of the neutron density transient generated by decreasing the
value of the thermal time constant.
The high frequency oscillations find
their origin in the poorly damped, high frequency roots associated with low
values of thermal inertia.
The frequency calculated from the simu lation
result is 16 cps, which is in good agreement with the 12 ops frequency
predicted by root locus technique.
We can conclude that reduction of the
thermal time constanat below the point of critical damping, as mentioned
earlier, will not improve the dynamics of the engine.
The value of the pressure time constant 7,
decreased by a factor of ten from its calculated value.
s.muation
was increased and
The results of
nder these conditions is presented in Figures 16A and 16B.
The
time needed for the open loop system to reach a new steady state is heavily
dependent on the turbopump time constant.
A change in its value is porpor-
tional to the change in the response time.
An increasing pressure causes
as increasing reactivity.
Therefore, it is not surprising that temperature
as well as the pressure of the system depends on the choice of pressure
time constant .
Little change occurs in the short term transient.
This is
expected since the initial pressure response still depends on the integration of the temperature increase as explained earlier.
Consequently, the
positive contribution of pressure to reactivity remains insignificant in
comparison to the contribution of temperature for any value of the pressure
time constant within an order of magnitude of the calculated value.
I
2To
B. PRESSURE RESPONSE FOR
VARIATION OF PRESSURE TIME
CONSTANT
A. TEMPERATURE RESPONSE FOR
VARIATION OF PRESSURE TIME
CONSTANT
-rp = 0.23 se c
2.32Po
Po
To
0
10
sec
20
30
1.0
0
sec
2.0
3.0
C. TEMPERATURE AND PRESSURE
RESPONSE FOR VALVE
PERTURBATION
2To
2Po
2To
To
Po
To
0
1.0
sec
2.0
3.0
0
2.0
FIG. 16 OPEN LOOP RESPONSE (continued)
sec
4.0
6.0
-85The results of sirmlation for various values of o( p collaborates
with the predictions made from root locus consideration.
response of the system is insensitive to changes of
C
P,
The initial
but the long term
response is proportional to the change.
The ope,. loop system has been perturbed. by introducing a step
change of reactivity.
This method was chosen since it
imposes an abrupt
change of a critical variable and can be performed experimentally.
A second
method of perturbation, waich can also be performed experimentally,
is a
change of valve position.
The result of simulation for the open loop bleed
turbine response for a step change of valve setting is presented in Figure 160.
Since the speed of response of the turbopump to a new valve position is far
slower than the response of neutron density to changes of reactivity
greater than the precursor yield fraction, the valve perturbation does not
impose as severe a change.
small initial transients.
The response is much more smooth with very
There is no deviation in overall response time.
The same perturbation was simlated for the topping turbine
system.
In this case, a step change of the valve causes a step change in
the pressure
.*
A change of reactivity follows imediately because of
pressure-reactivity feedback.
i1nitial method.
Thus, the perturbation is
similar to the
No additional information is obtained.
Analog sinlation of open loop has been performed using coefficients which were evaluated at the full power design point.
If the coeffi-
cients are evaluated for operation at the intermediate power level, the
long term sim.lated result is slower, while the initial transient is
practically the same.
Variation of the coefficients has an identical effect.
A comparison of the i-esponse at idle and fatll power is presented in Fig. 16D.
*Explanatioz of this is postponed for the moment.
-86C.
Closed Loop Stability
Although the open loop system is stable, introduction of feedback
control of pressure and temperature (a closed loop system) can cause
instability.
The conditions under which this occurs are examined analyti-
cally by application of Roufth's criteria and the root locus technique.
Three controls have been proposed.
Each control is
(a)
temperature integral control
(TIC)
(b)
pressure integral control
(PIC)
(c)
pressure proportional control (PPC)
investigated separately in
order to find the limits that
must be imposed on the signal amplification in the event that all other
controls are inoperative.
If the gain of each controller is below the
limit specified for idividual operation, elimination of other controls in
the event of malftnetioning will not lead to instability.
The alternative
situation of relying on proper itntioning of one controller to prevent
instability being caused by operation of a second controller is not as safe
a situation and should be employed only if the first method is unsuccessfil
in controlling the system.
Since three controls are proposed, investigation
of the combined control stability limitations is too complex for analytical
techniques, but 1s investigated in later sections in which the analog
computer is used.
1.
Temperature Controller Limits
An exact value of the temperature controller limits can be
obtained analytically if the following approximations are made:
(a)
All neutrons are emitted promptly.
Inclusion of delayed neutrons
would not lower the limit and could raise it.
(b)
The pressure remains constant.
Since the pressare time constant
is large conrpared to the other time constants, the assumption-is
-87reasonable, but pressure variation should be and is considered in
a more sophisticated model.
(c)
There is no delay between desired control rod position and the
actual position.
(i.e.
=
x)
With these assumptions the closed loop equations are
n
0
-
'
+ 1/2
T
0
G
0
/2
1
0
0
0
1
-1
0
S
perturbation
T
vector
The controller e uation
*
**
where
G
1
- G
'
- rT0o
has been linearized as described at the beginning of this section. The
scaling constants, k
kT,
-- etc ., are set equal to one (1).
Expansion of the determinent of the coefficient matrix yields
*
T'fT 5
+ 1/
2
j n2
+
G1 / 2
of S +
The roots of the above poly.omial all lie in the left half plane if the
Routh criteria are satisfied:
(a)
All coefficients have the same sign,
(b)
No coefficient is zero,
(c)
The following grouping of the coefficients is positive.
1/2 '
'~
1/2 G,
n
T
>
0
(4-43)
-1
-88The above conditions are sufficient to determine the range of values of G
1
for which the closed loop system will be stable.
*T
Evaluation of the constants at the idle condition yields:
<
0
G*
<
20
4-4)
The results of analog simulation in later sections indicates that Gj*
should be of the order of 1.0.
Evidently, the rocket temperature controller
is well below the instability limit.
Proportional control (TPC)
manner:
*
can be incorporated in the following
t
rG
( 61v
+
(9
G
After application of the LaPlace transformation to a linear approximation
of the above equation, we obtain
*
*
G*
40G
T
C1s
0
9
where
T
-
T
(4-49)
e
%
-
(T
*
-1)
dt
If both TIC and TPC are incorporated, the stability limits for Gj* are
increased in proportion to the value of'G
#I
< G
*C
T +
*
G450)
4 1/2
-
The above technique can be applied to show that the only stability restriction of G * is that it must be positive.
4 .'
The assumption of constant
-89pressure is not needed for this proof since the pressure equation is
included in the matrix.
The use of TPC to prevent instability caused by the following
range of values of G1 * violates the ide
of safety previously mentioned.
T
T
Furthermore, control rod inertia prents the rapid response needed for
effective TPC.
Its use is discusse4 only to point out its stabilizing
influence, although it is unlikely that unstable values of G1 * will be
needed for effective control.
The limit on solitary operation of G,* is based on the assumption
that pressure remains constant.
In order to investigate the effect# the
open loop pressure equation is included in the transfer function matrix,
and the technique is repeated.
S0
O
-/
-0/
0
O
(4-9
0
ub
Perbuiba
-7
0
-|T
o
O
Cot
0
0
0
The determinant is expanded and Routh's criteria applied.
are the same if
<<
1, and
is equal to 0.004.
of
>
of,
.
The limit of G%
At the idle condition
There is no reason to expect that the
ratio would ever approach an order of magnitude of unity.
Therefore, we
conclude that the pressure response is too slev to effect the temperature
controller limit.
-90The inclusion of delayed neutrons increases the upper limit of
G-,
In order to demonstrate this, the pressure is assumed constant and
the precursor concentration equation is included in the matrix.
The dominant
term in the limiting equation for the temperature controller is
This assumes that
(a)
0.05
(b)
'
(
0.05
d
10see
l
(c)
The above restrictions are far from severe, and will probably be satisfied
for any nuclear rocket engine of the type discussed in Sections I and II.
Inclusion of pressure variation does not change the stability limit if the
<
restriction of
1
Thus, a more accurate estimate
is observed.
P
of the temperature controller limit is
numerically
It
0
<
0
<
<
<
Gj*
C
(4-53)
1000
may be concluded that the gain necessary for temperature feedback control
should be far less than that which would cause instability. The root locus
for variation of G, between zero and positive infinity is presented in
Figure 17.
The coefficients are evaluated for intermediate power operation.
Instability occurs at Gi
-
1650.
Thus, the algebraic limit is
conservative
2.
Pressure Controller Limits
Application of the same technique as described above is sufficient
to show that the system remains stable for any positive value of the
proportional controller for either the bleed turbine or topping turbine
7y
G* = 1650
x
for G*= 1, no
variation from
can be seen
+20 i
--10.4 i
10i
-10.21
pole
/
/
-00
-00
-50
-40
-30
-20
\
-10
-0.2i
-101
-20i
FIG. 17
ROOT LOCUS AS A FUNCTION
OF
TEMPERATURE
no variation from
pole seen for
G1= 1.0
CONTROLLER,
-0.4
G*
-92system (control valve in front of the turbine).
lag are neglected.
analyzed.
Delayed neutrons and valve
Consequently, the system is third order and is easily
The coefficient matrix for the bleed turbine system is shown
below:
0
o
-/
7
/Z
perturb-
L
0
4.54)
ation
vector
0
-I
G,
O0
C
0
""7-
The polynomial formed from the coefficient matrix satisfies the Routh
criteria for any positive value of G3*, provided the open loop system is
stable.
(i.e.O(T > of p
)
A similar matrix for the topping turbine system is
o
S
-/
0
7-
o
z.
o
oT
/
-/
-/
-(7,s/)
0s+
O
= perturbation
o
o
O
0
cl)vector
Ga
-
0
~
(4-55)
e~
/j
Again, the system is stable for any positive value of G3*, provided the
3
open loop is stable . Root loci as functions of G 3* for the two systems are
presented in Figures 18 and 19.
Investigation of PIC is not as simple since the system becomes
fourth order and instability is possible for certain values of the
C)
--1 201i
-- 0.2 i
no voriation from pole
seen for G =0.25
--A0.1 i
-101
root position
for G*= 0.25
-00
-00
-40
-30
-20
sec
FIG. 18
ROOT
LOCUS
-10
1
-0.2
c
.x
x..-
-0.1
1
(BLEED
CONTROLLER, G*
TURBINE)
-- 101
H -0.1 i
-- i-20 i
-1-0.21
AS A FUNCTION
OF PRESSURE
'0
c~)
20 i
--
10i
-- 0.1i
0.2 i
7root position for
G*=0.25
|I
-30
|
-20
-0.2
-10
root position
for G*=0.25-
-1-0.21
-20i
FIG. 19
ROOT
LOCUS (TOPPING
PRESSURE
TURBINE)
CONTROLLER,
-0.1 i
AS A FUNCTION
OF
-95coefficients.
Although the precursor equation is omitted in order to
simplify the analysis, the application of Routh's criteria becomes too complex for useful algebraic manipulation.
Furthermore, the equations formed
by the application of the technique have many terms of comparable magnitude.
It
is not possible to neglect a majority of the terms as it was in finding
the limit for TIC .
If the delayed neutrons are neglected and the temperature is
assumed constant, the system can be easily analyzed.
is found that the
It
bleed turbine system is unstable for any value of G2 , while the topping
turbine system has roots which lie of the imaginary axis.
However, inclu-
sion of this assumption oversimplifies the system.
Evidently, it is not possible to obtain a convenient algebraic
expression for the limits of G * (PIC).
Numerical values can be obtained
by a combination of the root locus technique and Routh's technique.
Figure 20 is the root loci of Ga* for the bleed turbine; Figure 21 is for
the topping turbine.
The coefficients are evaluated at the idling condition.
Instability occurs in the bleed turbine system for G2 *
>
8.75 sec.~1
while the topping turbine system remains stable for any value of G2*The results of analog simlation, which are presented in Section VI,
indicate that the gain on PIC will be limited to values less than 0.005
sec.
.
Since this value is three orders of magnitude less than the
predicted limit, no problems are envisioned.
However, it
should be noticed
that the topping system seems to be the more stable of the two proposed
systems in regard to integral pressure control.
A family of approximate root loci as a function of G3* for
33
in Figure 22 for the bleed turbine
various values of Ga*/G3 * is presented
system and in Figure 23 for the topping turbine system.
It
can be seen
from Figure 22 that a sufficiently large PPC gain is capable of preventing
bleed turbine instability which results from exceeding the individual PIC
0.21
201system becomes
unstable
at
G = 8.75 -,
IO01 -
0. 11
crossover occurs
at ± 1.98 i
-40
-30
-20
*0
-0.2
-10
se c-i
root position'
-10i
for G
-0.11
=.005
-0.2i
20i -
FIG. 20
ROOT LOCUS (BLEED TURBINE)
PRESSURE CONTROLLER,
G*
AS
A
FUNCTION
OF
x
+0.4 i
+ 20 i
H+ IOi
-1 +0.21
'.0
-4
x
-40
-30
-20
-10
H-1Oi
(5
FIG. 21
ROOT LOCUS (TOPPING
CONTROLLER,
G*
--
Root position for
G* = 0.005
20i
TURBINE ) AS
A
FUNCTION
OF
PRESSURE
98
x
me
x
G /G*=0
same as
G* only
-00
.x
.
x
-xOKa.2G* /G*3 =0.01
G*/t
2
3 =0.05
(pro bable
design
point )
-00
G*/G30.11
-00
G*
G2 / G*=
3 =.0.2
-0.5
-0.4
-0.3
-0.2
-0.1
0
Sec'
FIG. 22
ROOT LOCUS (BLEED 1TURBINE) AS A
FUNCTION OF G
FOR VARIOUS VALUES
OF G*/G*
(Root loci near - 23 ± 20i are similar to Fig.17)
99
G /G
C 4
=0.01
G*2 /G*3 = 0.05
(pro boble
design point)
x
G* /G'*= 0.11
G* /G *= 0.15
*
G*
-0.4
-0.3
-0.2
/
/G3
0. 20
-0.1
Sec. ~
FIG.23
ROOT LOCUS
FUNCTION
OF G* /G*
(TOPPI NG TURBINE)
OF
G5
FOR
AS A
VARIOUS VALUES
(Root loci near -23 ± 20 i are similar to Fig.18)
-100stability limit.
which it
is
It
is,
of course,
stable for zero PPC.
safer to operate the PIC at a level at
In these root loci the coefficients are
evaluated at the idling condition, but no significant change occurs for
full power operation or for operation between the two levels.
D.
Closed Loop Response
Closed loop response is best studied by analog simulation.
results are presented in Sections V, VI, and VII.
However,
remarks can be made from consideration of the root loci.
The
some preliminary
Furthermore,
analytic considerations show that the topping turbine system with valve
behind the turbine can be disregarded from a dynamic point of view in comparison to the same system with valve in front of the turbine.
1.
Comparison of Root Location for Open and Closed Loops
The root loci presented in Figures 17 through 23 depict the path
described by the roots as the controller gains are increased from zero to
positive infinity.
For zero gain the roots of the closed loop system are
the same as those of the open loop, with exception to the pole introduced
at the origin by the integral controllers.
This is a mathematical point
with no physical significance for the gain equal to zero.
The pole at the
origin serves only to indicate a starting position for an infinitesimal
integral controller gain.
If the controller gains are small, the deviation
from the roots of the open loop is not significant.
The results of
analog simulation indicate that suitable transient response can be
achieved with small values of the controller gains.
root location of the closed loop deviates little
loop.
Consequently, the
from that of the open
The new position of the roots which result from closing the open
loop is presented in each of the root loci of Figures 17 through 23.
-
It
101%-
then can be expected that the closed loop response will present
many of the characteristics already noted for the open loop.
(a) The
rocket should reach desired new steady states of operation in a period of
time of the order of ten seconds.
(b) Short term oscillations will be
present, but should damp out quickly and not effect the long term response.
(c)
Variation of the values of the system coefficients should not signifi-
cantly effect the response.
Exceptions to this are the pressure time con-
stant which should be directly proportional to the time necessary to reach
a new point of operation. A second exception is the thermal time constant.
T should increase the initial oscillations, but should
Reductions of
not have much effect on the long term response.
Analytic predictions which are based on a linear model cannot be
carried too far, and analog simulation is necessary to thoroughly investigate the transient response.
2.
Comparison of Pressure-Valve Response of the Suggested Turbopump
Drives
The pressure equations of the suggested turbopump drives are
presented below.
Bleed turbine
7'dP
**
*
(P)
(4-56)
Topping turbine (Case I, valve in front of the turbine)
P
dt
2
*
VV
(4-57)
-102-
Topping turbine (Case II,
valve behind the turbine)
P *(V
S(P)
)2
(4-58)
(P
V
The differentiation, indicated in equations (4-57) and (4-58),
and the resulting equations are multiplied by
V*.
is performed
These operations yield:
Topping turbine, Case I
dP2
p
M P
dtG
V
e
*+
p -
*
V
(4-59)
dV*
d
d
Topping turbine, Case II
p
7 P*
-t
*(V)* 3
P
* )2
(P )
*
(V )?
* +
9 *
''p
p --
V
*
dV*
d
dt
(4-60)
Equations (4-56) and (4-59) are the same with exception to the extra term
in the topping turbine equation which is proportional to the time rate of
change of the valve position.
Consequently, the pressure of the topping
turbine system rises more quickly than the bleed turbine system pressure
as the valve is being opened and decreases more quickly as the valve is
being closed.
This indicates that a more rapid response to changes in
desired system pressure may be obtained with the topping turbine system.
The same term occurs in the second topping turbine equation, but
the term which is proportional to the output power to the turbine
(
P*
(V*) 3
* ) is a stronger function of valve position than either
of the first two turbopump drives.
compare the two systems.
Consequently, it
is difficult to
-103If temperature is held constant in equations (4-56), (4-57), and
(4-58), pressure and valve position are the only dependent variables.
There-
fore, the pressure response of the three suggested turbopump drives can be
is assigned its steady state value
If T
compared for a given valve change.
of one, the following eguations result:
Bleed turbine
7-
d
*
P
V
(P*) 2(4.-61)
Topping turbine, Case I
**
P*
'fp
262
(4-62)
W P
(
V
VV
Topping turbine, Case II
pP
d
*
P
((-63)
*2
*
*(V*)
V
V
Although these equations are non-linear they can be solved exactly for a
step change in valve position.
Only the results are presented; the actual
manipulation is demonstrated in Appendix VIII.
Bleed turbine
*
P
(t
(-4
**
(V
*
-1)
e
V
t/
-
/rp
+
1
Topping turbine, Case I
p* (t) - v* (t)
1'4-65,)
Topping turbine, Case II
* 3
Pf()) 1+
r(I * ) 2
-(V
=
3.
t/-7
(N--66)
Solutions obtained by solving a linear approximation of equations (4-61),
(4-62),
re presented below:
and (4-63)
Bleed turbine
,
v(
)
(A-67)
P
Topping turbine, Case I
P
(4-68)
(t) = v, (t)
Topping turbine, Case II
(4-69)
( 3-2 A
V
P (t
where
P
=
P-
V
=
V* -
1
The linear and non-linear pressure-valve response of the three turbopump
drives are graphically presented in Figure 24.
The step change in valve
position has been adjusted in each case to give the same value of P*( C). )
The bleed turbine response is closely approximated by a first order lag.
The time required to reach a new steady state is proportional to the pressure time constant .
excellent.
The response of the topping turbine (Case I) is
The only delays involved are associated with acoustic propaga-
tion and charging times which are very small as mentioned earlier.
response of the topping turbine (Case II)
of the first two turbopump drives.
The
is a combination of the response
The step change of valve position
105
2.0
.8
1.6
0.
1.4-
1.2 10
O.
W
0.4
1.2
0.8
1.6
2.0
2.0
1.8
L
TOPPING
(CASE
*
1.61
L
I)
v*= 2
*~*
1.4
TURBINE
2
pressure
I-
step perfectly in both
linear and non-linear
models
1.2
1.0
0
follows valve
0.4
0.8
1.2
1.6
2.0
0.4
0.8
1.2
1.6
2.0
2.0
1.8
*L 1.6
1.4 -
1.2
1.0
0
t /Tp
FIG. 24
PRESSURE-
VALVE
R ESPONSE
-106causes a corresponding step change of system pressure, but it also changes
the pressure ratio across the turbine and therefore increases the turbine
power.
The increased turbine power output slowly increases the pump speed
and thereby the pump output pressure.
first order lag response.
This secondary rise is similar to a
Since an exact response is preferred to a first
order lag or even an exact plus first order lag, the pressure-valve
response of the topping turbine with valve in front of the turbine (Case I)
is
superior.
For this reason only the first topping turbine system is
fulUy analyzed.
Since the bleed turbine has been the more common of the
two turbopump drives in current rocket engines, it
is also considered fully
although its response is not as suitable from a dynamic point of view.
-107Section V:
A.
NUCIEAR ROCKET ENGINE STARTUP
Proposed Met-.hod
In this phase of rocket operation,
the neutron flux
.ist be raised
to a power level sufficiLent to maintain a self-sustaining turbopump system.
An explosion cartridge Is employed to drive the rocket turbine or an
auxiliary turbine whic h in turn drives the rocket pump.
gaining speed, the core is
core but is
subcritical.
recycled. through the pump.
200 psi had been achieved. in
Hydrogen is
While the pump is.
not introduced to the
When a pressure of the order of
the recycling system, a valve (not the control
valve) between the pump and core is
opened topemit pressurized hydrogen to
enter the core and to cause supercriticality.
Negative reactivity-temperature
feedback will bring the core to a new just-critical state at some higher
temperature.
The control rods and control valve are maintained in
a constant
position determined by the desired pressure and temperature of the intermediate power level.
By positioning the rods and valve for full power
operation, it might be possible to proceed directly to fall power rather than
the suggested intermediate power level.
However,
the use of feedback control
for the transition from intermediate to full power is
safer and does not
require as great precision in the knowledge of the system coefficients.
Once the idling ccndition has been attained, the explosion cartkidge is no
longer needed to drive the turbopump since heated, pressurized hydrogen
from the core is available.
Thus, the turbopump would be self-sustaining
and the rocket engine readay to proceed to full power as quickly as can be
safely and efficiently achieved.
Introduction of hydrogen in this manner can cause prompt
criticality.
In order that only a small amount of the propellant is
consumed during startup, it
is necessary for the system to be able to with-
stand a sudden increase in the hydrogen and the ensuing burst of power.
The purpose of analog simulation is to learn how fast the core pressure
-108can be increased without harmful thermal effects produced by the sudden
power burst.
If
propellant is
the hydrogen is
provided by an outside source,
no longer a problem.
wastage of
The engine can be brought to the inter-
mediate power level more slowly and without dangerous thermal effects, but
problems of switching from the auxiliary source of hydrogen to the rocket
tank hydrogen as well as handling of an auxiliary source are introduced.
In ei
t
her case,
a knowledge of the tiortest pdssible time
brought safely to idling is
B.
for'the engine to be
important.
Proposed Model
The previously derived equations and methods of simulation are
suitable for startup with only minor modifications.
is
(a) The pressure equation
not necessary since the core pressure depends only on the position of the
valve between the pump and core.
(b)
The time dependent pressure
appears in the temperature and reactivity equations is
analog by an electronic function generator.
which
simulated on the
(See Figure 14 )
(c)
During the
initial instant following the introduction of hydrogen to the core, the
coolant inlet temperature -mynot be negligible in comparison to the outlet
temperature as assumed in the derivation of the temperature equation.
However, no modification of the temperature equation is made.
Before startup,
the. core will be at am ambient temperature which is a factor of five greater
than the entering hydrogen temperature.
Within milliseconds after the
hydrogen enters the core, the coolant outlet temperature rises rapidly.
The brief instant, during which the hydrogen lowers the core temperature, is
too small to have a significant effect.
If the control mechanisms are set for an idling temperature of
1000*R and the core hydrogen pressure is stepped from zero to 300 psi, a
reactivity increase occurs of the order of 10% for values of the reactivity
coefficients listed in,. Table 3.
If the reactor were just critical for zero
-109a huge burst of neutron flux would ensue.
pressure,
possible by increasing the pressure linearly in
(a ramp in pressure).
A less sudden change is
time from zero to 300 psi
Both cases are investigated by means of the analog
computer.
C.
Re sult s o f Analog Simulation
In
order to simulate as severe a test of startup characteristics
as might be possible, the reactivity was assumed to be zero rather than
The results of simulation are
negative with no hydrogen in the core.
A step change in pressure greater than zero
presented in Figures P5 and 26
.
to 48 psi caused saturation in
the neutron density amplifier.
The change in
pressure of 48 psi is limiting only for the analog and not necessarily for
the rocket.
As can be seen from the graph, a spike in power density occurs
causing a step change of temperature.
limiting factor is
No overshoots can be noticed.
The
the thermal shock caused by the sudden temperature
Prediction of thermal stress or thermal shock limitations is not
increase.
included in this thesis.
Three ramp inputs were simulated.
In each case the final pressure
was 300 psi; only the time needed to reach that value was varied.
results are also presented in Figures 25 and )6
shoots in temperature occur.
.
These
Again, no serious over-
As expected, the oscillations in neutron
density and temperature become more severe as the steepness of the ramp is
increased.
These results are encouraging.
Fast startup using the proposed
method should be satisfactory. The limiting factor of transient thermal
stress and thermal shock will need extensive analytical and experimental
work.
n/no
psi
500
300
400
240
300
180
200
120
100
60
0
0
1.0
sec
2.0
0
3.0
n/no
sec
psi
1001
300
psi
300
240
240
180
180
120
120
60
60
0
0
1.0
sec
2.0
3.0
0
1.0
sec
FIG. 25 POWER DENSITY AND PRESSURE DURING STARTUP
2.0
3.0
0
01
psi
1300
0
1.0
0
1.0
sec
2.0
3.0
0
1.0
2.0
3.0
0
L.O
sec
2.0
3.0
2.0
3.0
3000
2000
1000
0
sec
FIG. 26 TEMPERATURE
AND PRESSURE DURING
sec
STARTUP
A
-112-
Section VI:
TRANSITION TO FULL POWER
Once the idling condition has been achieved, the engine should be
brought to full power operation as rapidly as possible.
Less than maximum
thrust operation reduces the burnout velocity since the propellant mst be
carried to a higher altitude before being fully utilized.
Variation from
maximm thrust can be advantageous if the effects of atmospheric drag and
dissociation of the propellent molecule are significant, but the effects
are of secondary importance.
Since the burnout velocity also depends on
the specific impulse of the propellant, efficient engine operation demands
that the specific impulse attain its maxim= value as quickly as possible.
These demands on rocket performance are translated to engine performance by
requiring rapid achievement of maximum pressure and temperature.
(17)
The desired pressure can be rapidly attained if the valve and turbine
are designed to have a maximum power output higher than the output needed
for the designed point of operation.
In this case the turbine output is
below its maximm for a majority of its operation time.
A compromise between
the longer time needed for attainment of maximum pressure versus a heavier
turbine m,st be made if the engine is to operate at an optimum point.
In
simlating the transition to full power, the corresponding problem is to
decide upon a value for the ratio of the maximum valve setting to the full
*
power setting (
V
m
full power
).
A value to 1 33 is reasonable.
There is no extenal restriction on the speed at which the
valve can be moved since a first order lag has been postulated between the
desired and actual valve setting.
If the control rods have sufficient worth and can be moved at any
speed, full power temperature can be attained as rapidly as desired, but
rod worth and maneuverability are limited by practical considerations.
Values of control rod worth greater than 15% will be difficult to attain,
while control rod velocity will be limited to speeds less than 0.6%/sec.
-113Pressure and temperature overshoot mst be limited to 5% since
the rocket will be designed to operate close to the maximm pressure and
temperature that the engine can withstand.
It will be shown that this
consideration imposes limitations on the speed of transition to full power.
Further restrictions, which are based on materials consideration,
are not included in the thesis.
Investigation of the transition to full power is performed in a
manner similar to the simwlation of the open loop response.
The values of
the various controller gains are adjusted to attain as rapid a response as
the system coefficients are varied in order to investigate the sensitivity
of the system to each of the coefficients.
Finally, an oversized turbine is
assumed and a more rapid pressure response is simlated.
A.
Limits of Feedback Signal Amplification
The system pressure and temperature for idling and full power
operation are given below.
A range of practical values could be employed
for the idling condition, but the results are similar.
(a) Idling condition:
T = 1000*R,
(b)
T m 5000*R,
Full power operation:
=
275 psi
P e 1500 psi
The limitation of rod velocity places a limit on the temperature
controller gain, G*, of 0.876 sec~1 for the temperatures listed above.
This can be seen by examining the initial control rod velocity as given by
the temperature control equation of (3-55).
proportional controller gain, G3 , mt
Similarly, the value of the
be less than 0.365 if the restriction
on maximum valve setting is to be upheld during the initial valve change.
Pressure integral control is incorporated to insure zero steady state error.
The primary means of pressure control is left to the proportional controller.
An example of this is the creation of transient thermal stresses greater
than the graphite core can withstand.
-114Consequently, the value of G2 * is small and is adjusted to insure that the
limitation of value setting is not acceded.
B.
Results of Simulation
Figure 27 is a graphical presentation of the temperature, pressure,
control rod position, and valve setting simulated for full power transition.
The system coefficients were assigned the calculated values that appear in
Table 3.
If the temperature controller gain, G
,we
assigned its
aximum
permissible value, the ensuing overshoot in pressure and temperature Vas too
severe.
A value of .464 se
.-
,
53% of the maximum, reduced the overshoot
to the acceptable value presented in Figure 27.
A value of G3 * equal to
0.07, which is 20% of the maxinum, reduced the overshoot in pressure to an
acceptable value without violating the restriction on maximum valve position.
In order to eliminate steady state error between the desired full power
pressure and the actual pressure, G2 * was assigned a value of 0.002 sec.-l
As mentioned before, p::oportional feedback is designed to be the primary
means of control.
A period of 17 seconds was required for transition to full power.
The maximum control rod velocity was 0.4%/sec. which is within the acceptable
limit.
The required. valve motion presents no difficulties.
A deviation
between the response of the two turbopump systems can be noted and will be
explained in a later part of this section.
C.
Results of Coefficient Variation for Full Power Transition
Closed loop transition to full power exhibits the same insensi-
tivity to coefficient variation as the open loop response.
The following
coefficients were varied: (
Only the pressure time constant,
transition.
The time require
, had any significant effect on the
varied proportionatelfwith the va3:ue of the
B CONTROL ROD POSITION
G* =0.464 sec-'
.032 _
A TEMPERATUR
5000
4000
-
ti.024
3000
t
2000 -
cuvsapa
dentrcurves
identical
>.01
6-
two turbine
t
identical
appeara
.008
1000
0
1500 --
10
sec
20
0
30
C PRESSURE
1200
topping turbine
bleed turbine
900
3Vo
600
2Vo -
300-
Vo
30
20
10
sec
D EFFECTIVE VALVE
POSITION
G*=0.002 sec~
G 0.07
3-
two turbine
appear
0
0
FIG. 27
10
sec
NORMAL
20
30
TRANSITION
0
TO FULL POWER
10
sec
20
30
-116-~
If the restriction on maximum valve position is
pressure time constant .
eggal to 3
upheld the time required is
A+ 10%,
'1, is computed for
where
Evidently, rapid and efficient transition to fll
the idling condition.
power depends heavily on reducing the inertial lag of the turbopump.
A change of the value of the precursor yield fraction is
compen-
sated by a proportional change in the value of G1 * which is scaled in
relation to
Since the value of Gi* is well below the limit predicted
in Section IVr, (G*
), reasonable reduction of
/
any stability limitation on Gl*.
= .006 5,
does not impose
No visible deviation occurs for
.0050, and 0.0020.
If the neutron lifetime,
, is increased, the initial oscilla-
tions are not as well damped., as expected from previous root locus considerations.
Change of 4
response.
by an order of magnitude does not effect the overall
Even in the case of increased lifetime, the initial transients
cannot be seen after a period of 0.5 seconds.
The effect on the initial
temperature response is negligible.
Increase or decrease of the reactivity coefficients, cYe and C<',
change the amount of reactivity that must be provided by control mechanisms.
However, the effect is small and easily compensated by change of the
temperature controller gain.
The insensitivity of the system to change in the thermal time
constant has been demonst:ated previously.
simulated for changes of
occurs for decreased
/7
I
The transition to full power was
by a factor of four.
Some initial oscillation
, but the effect is small.
The system is remarkably
insensitive to variation of the thermal time constant.
The time lags associated with control rod and valve positioning,
J and
J. are too small to have much effect on system response.
Variation of these coefficients produced no significant change.
-117D.
Transition to Full Power Using an Oversized Turbine
If the allowable maximum value of
is
V*max
V*fall power
increased to
three, the transition can be accomplished in a shorter time than shown in
This corresponds to using a much larger turbine which operates
Figure 7.
at capacity for only a few seconds .
The results of simulation are presented
graphically in Figure 28 for both turbopump systems.
By increasing the
limit on maximum valve setting to 3, the time required for transition was
decreased from 15 to 10 seconds.
E.
A Comparison of Transition for the Two Turbopump Systems
It
has been shown in Section IV
that the only difference in the
equations that describe the two systems occurs in the time dependent pressure
The topping turbine equation has an extra term which is propor-
equation.
tional to
P* d.V*
.
Consequently, deviation of the two responses occurs when
the valve velocity term is non-zero.
The effect is easily seen in the
pressure and valve sirmlation of rapid transition to full power presented
in Figures 2tCand
F9. The topping turbine pressure increases more rapidly
than the bleed tu'.rbine pressure as the valve is being opened and increases
less rapidly as the valve area is being reduced to its designed point of
operation.
However, the deviation is small and contributes little to
judging which system h.s the better dynamic performance for feedback controlled transition.
50
400
c300
0
4-
Q)
cr
2
I
1 500
900
bleed
0
10
sec
20
30
20
30
turbine
ng turbine
-
3Vo
600
2V o
300
Vo
0
10
I
|
PRESSURE
1200
(0
D.
0
0
10
sec
20
30
FIG. 28 RAPID TRANSITION TO FULL POWER
sec
-119Section VII:
A.
FULL POWER CONTROL
Response at Full Power
Once full power has been attained, small corrections of pressure
and temperature are necessary in order to achieve the proper trajectory or
to follow a given thrust-specific impulse program.
An example of the latter
is given in subsection C of this section.
During transition to full power, the deviation between the desired
temperature at
the full power level and the actual temperature at the
intermediate power level is much greater than the deviation between desired
and actual temperature encountered at full power operation.
Consequently,
the value of G," has to be lower during transition than at full power in
order that the desired rate of change of control rod position does not
exceed practical limits.
(i.e.
0.6% per second).
* and G2 A similar situation exists with the value of G 32
deviation between actual pressure and desired pressure is
power.
The
small at full
The gain of the FPC can be increased without attempting to exceed
the maximum possible valve position.
The same reasoning applies to the gain
of PIC.
Increase of the controller gains speeds the response.
Analog
simulation showed that the response to a step change of desired pressure
(So psi) or temperature (100 0 R) can be decreased from 15 seconds to 5 seconds
by a corresponding increase of Gi", G2 , and G3 * from the values used for
transition.
For the increases cited above, any attempt to reduce the
response time beyond five seconds resulted in unacceptable overshoots of
either pressure or temperature.
The trend is intuitive.
The smaller the
desired change, the faster can be the response if the controller gains are
increased.
However, corrections which are faster than five seconds
probably do not justify large in-flight increase of controller gains.
120=
Also, stability limits exist for some of the controllers.
It
is difficult
to imagine a more rapid response being required for the thrust and specific
impulse of the primary rocket engine.
A feasible method of control operation would be to keep the
controller gains for full power operation at the same level used for
transition.
An improvement over this plan would be to increase the value
of the gains at full power, but the increase should be less than a factor
of five .
Increase beyond this point would introduce the possibility of
dangerous overshoots and would not greatly improve the ability of the engine
to maintain the desired thrust and specific impulse.
B.
Full Power Control with Constant Control Rod Position
Examination of the pressure equation of either turbopump system
indicates that the ratio of core pressure to core temperature at steady
state is a function only of the valve setting, V*.
P* (steady state)
a
(7-1)
T* (steady state)
t
It
was shown in Section III that steady state operation of the engine
occurs at the intersection in the temperature-pressure plane of the line of
zero rate of change of pressure with the line of zero reactivity.
If the
control rods are hel in a constant position only one line is needed to
describe the dependence of zero reactivity on pressure and temperature.
The point of steady state operation can be moved along the zero reactivity
line by varying the value of V*, and thus changing the ratio of steady
state pressure and temperature,
(See Figure 29A)-
Thus, both the pressure
and temperature of the system can be varied by adjustment of only the
control valve.
However, this method of control does not allow an indepen-
dent choice of both pressure and temperature.
It
is questionable whether
the ease of control justifies the inefficiency of operation which must
121
*
*
3
V4
tines of zero
zero
*
=
reactivity
points of steadystate operation
increasing values of V*
P
A. PRESSURE AND TEMPERATURE
NOT
NE
INDEPENDENT
V*
4
increasing
values of
P*C;
p**
,..Pc
li o* e
lines of zero p*
lines of zero
increasing values of V*
B. PRESSURE
FIG. 29
AND
FULL
TEMPERATURE
INDEPENDENT
POWER CONTROL
result.
The guestion can only be answered after the following information
has been obtained:.
(a) precise knowledge of the dependence of reactivity
on pressure and temperature at fall power operation.
(b) a knowledge of
the variation of engine thrust and specific impulse that will be required
The above information is beyond the scope of
during full power operation.
the thesis, but it is doubtful that valve adjustment itself will be suffiThe independent control of pressure and
cient for effective control,
temperature obtained by combined valve and control rod adjustment seems to
be more satisfactory.
C.
(See Figure 29B.)
An Optimum Tht
Frogram for Nuclear Rockets
C . J. Wang(26) has shown that operation at maximum thrust is not
necessarily the optimum method of thrust programming.
hydrogen molecule increass
Dissociation of the
as the pressure of the hydrogen is reduced.
Therefore, a decrease of system pressure at constant temperature causes an
increase of specific impulse with a consequent decrease of flow rate.
The
increase of specific impulse increases the efficiency of the engine, but
reduction of flow rate decreases the efficiency since the propellant must be
carried to a higher altitude.
Evidently, an optimum variation of thrust
exists which will yield a maximu
burnout velocity.
Wang develops a simple relation between specific impulse and flow
rate, in which dissociation is considered as a function of pressure as well
as temperature.
By substituting this expression into the differential
equation obtained by application of the variational principle to the rocket
velocity eguation, he concludes that the specific impulse should be
increased linearly in time .
This is accomplished by holding temperature
constant and reducing the pressure in accordance with the conditions mentioned above.
This thrust-specific impulse program is
slowly varying and
the proposed control system should have no difficulty following it.
-123-
The model which has been proposed for simulation of nuclear
rocket dynamics is
be suggested.
D.
suitable to study the above program and others that may
However,
such studies are not included in the thesis.
Possible Malfunctions at Full Power
A study of all possible malfunctions of a nuclear rocket engine
is not included.
A few of the major problems are considered and predictions
made as to their seriousness.
Erosion of the graphite at the coolant channel wall increases the
coolant void with resultant increase of hydrogen in the core for a given
pressure and temperature.
If the core is undermoderated, which will be the
case in a nuclear rocket engine, the additional hydrogen causes an increase
in the value of
and a decrease of $c/ .
A sign change of o< c is not
possible.
It
has been shown that these changes will not cause instability
and that significant changes of the reactivity and reactivity coefficients
can be controlled without dangerous pressure and temperature transients.
If
a coolant chamel becomes stopped., the graphite around the
channel is no longer cooled.
weakening of the material.
Its temperature increases with resultant
Under these conditions, it
would be possible
for large pieces of the graphite to be ejected from the core,
this would cause significant damage to the reactor, it
sarily catastrophic.
and large erosion.
Although,
would not be neces-
The ejection would be felt by the system as a sudden
Stoppage in the channel is more serious than erosion,
but if the core is not severely damaged., the system would still be stable,
and the engine could continue to operate at a less efficient level.
Control failure should not be disastrous if
set below the point of instability,
each controller is
Hopefully, the controller which
malfunctions can be removed, and the rocket engine should continue to
operate at a high power level although one of its control mechanisms
is inoperative.
Certainly, malfunctions exist that are catastrophic.
failure would stop the flow of coolant to the core.
Pump
Even if the
reactor were scrammed immediately, the core would vaporize as a result
of delayed neutron induced fission.
The proposed control system should be capable of controlling
the engine accurately for normal operation and satisfactorily under
adverse conditions.
-125Section VIII:
SUARY AND CONClUSIONS
The attempt has been nade throughout the investigation to obtain
a general understanding of nuclear rocket engine dynamics.
Although the
equations that have been derived to describe the dynamics are not elaborate,
they incorporate the important features of each co
onent and enable one to
retain a physically intuitive understanding of the coefficients and perameters.
Analytical solution of linear approximations to these equations
has yielded
(a) general criteria concerning the stability of the controlled
and uncontrolled engine,
engine, and
(b) predictions concerning the response of the
(a) iiications of the sensitivity or insensitivity of the
engine response to varitions of the major coefficients.
In order to solve
the non-linear equations, recourse has been mde to analog computer simulation, but again the imporbant conclusions have not been obscured by overelaborate analysis.
A.
Stability
The criteria for stability of the uncontrolled (open loop) engine
can be stated concisely if one accepts the following conclusion based on
the open loop pressure equations of each of the proposed turbopump systems:
In open loop operation the ratio of core temperature to pressure at states
of zero time rate of change of pressure is equal to the same ratio at
steady state.
equations.
This conclusion is easily seen by investigation of the
The generality of the conclusion is a result of reduction of
the pressure equation for each turbopump system to a form that differs only
in closed loop characteristics.
criteria are the following:
With this restriction, the open loop
The open loop system is stable if (a) the rate
of change of reactivity with temperature for constant hydrogen density is
negative, and (b) The rate of change of reactivity with hydrogen density
-126for constant core temperature is positive.
than necessary.
The latter is more restrictive
Euation (4-23) gives
A negative value can be tolerated.
this value exactly.
However, any conceivable nuclear rocket which is
similar in nature to the one proposed would satisfy condition (b) above.
In practice, therefore, the stability of the open loop rests only on
condition (a).
If conditions (a) and (b) are both satisfied, a quantity A is
defined which measures the margin of stability of the system.
1V)
4 >
For A
<<
(See Section
1, the system is on the verge of instability, while for
1, the system is very stable .
tions show that full power
Owr
operation of the proposed design for the rocket will yield a va3ne of
that is intermediate between these two extremes.
Linear approximations of general equations of temperature, pressure, and reactivity were used to formulate the above criteria.
The only
restrictions to the equations are noted in Section IV and are consistent
with physical intuition.
The criteria for open loop stability cannot be stated as concisely
if the conclusion based on the pressure equation does not apply.
A quantity
R mast be defined which is the slope of a line connecting states of zero
For R > 1, the
time rate of change of pressure in the T*,P* plane.
previous criterion for stability is too restrictive.
ture-reactivity feedback can be tolerated.
For R
criterion for stability is not restrictive enough.
<
Some positive tempera1, the previous
Small values of negative
temperature-reactivity feedback will not be sufficient to prevent instability.
A mathematical formulation of the criterion is presented in equation (4-36).
In a qualitative sense, the steeper the slope of the turbopump line the more
stable the- system and conversely, the less steep the turbopump line, the
greater the possibility of instability.
-127The criteria for stability of the controlled (closed loop) engine
are more complex.
The assumtion is made that the open loop system is
stable since the engine can be designed to met the open loop criteria.
A controlled, but unstable, open loop, is too dangerous to be considered
feasible.
The control system which has been proposed relies on integral
and proportional feedback control of pressure and temperature.
It has been
shown that control of these parameters is synonymous with control on rocket
thrust and specific iamlse.
Proportional control of either of the parameters for either of
However, solitary
the turbopyap systems proposed causes no instability.
operation of proportional control introduces steady state error and, in the
case of teqperature control, requires faster control rod response than is
physically possible.
For this reason, proportional feedback control of
temperature has been rejected although it
increases the range of stability
of the temperature integral controller.
For
for
o
G*
o < GL* <
(
the system is always stable;
, the system in stable for values of the coefficients
in the same range as those calculated.
G0*
The suggested operational value of
is a factor of 20 below the calculated value of
1000 below the calculated value of
-
.
-
and a factor of
Consequently, no difficulty
is expected and the stabilising influence of temperature proportional
control will not be necesary.
The stability limits on the pressure integral controller were
based on root loeus techniques.
statemnt.
It was impossible to form a simple algebraic
No stability limit exists for the pressure integral controller
of the topping tutrine system, provided the coefficients are in the same
range as mentioned above.
The stable rage for G *
in the bleed turbine
system is a factor of 100 greater than the suggested operational value.
Since the inertia connected with movement of the control valve is small,
means of pressure control is the more stable proportional
the primar
control.
error.
Integral control is incorporated only to remove steady state
For this reason, only small values of G2 * are required.
The amplification limits of the above paragraphs were
by assumng that only the one controller was operating.
a
a
If the gains are
below the limits mentioned, combinations of the controllers cause no
instability.
If
the controlled system is designed to operate in this
manner there will be no reliance on one controller to maintain an instability introdnced by single operation of a second controller.
The inherent
safety in this procedure is obvious.
B.
Uncontrolled Response
-
Analytic investigation of linear approximations to the dynamic
equations of open loop operation in the complex s-plane indicated that the
doinnt
root of the open loop transfer finetion lay close to the origin on
the real negative axis.
Although a one-to-one correspondence between the
frequency and time domains is not possible, ve can conclnde that the
asymptotic response of the system will be slow since the dominant root has
a small absolute value.
A period of time of the order of ten to fifty
seconds was predicted by Investigation of the actual value of the root.
This prediction was verified by analog silation.
The open loop system
required approximtely fifteen seconds to reach a new steady state following
a step chag
in reactivity.
The step change of reactivity was sufficient to bring the
to prompt criticality.
Conseuently, a slow response was unexpected.
reactor
The
sluggishness of the entire system finds its origin in the comparatively
large time constant of the pressure equation.
Since reactivity is dependent
on pressure, the slow response of the entire system is related to the slow
response of pressure.
-129One wouA expect dangerous short term transients in the response
to large changes of reactivity.
Investigation of the roots of the transfer
function indicated that high frequency roots exist, but they are sufficiently
damped so as not to be dangerous.
A physical basis for the system's ability
to safely withstand large changes of reactivity has been given.
the initial temperature response is
In brief,
faster than the initial pressure
response since temperature depends directly on power density (neutron density) while pressure depeals only indirectly on power density through
temperature.
(a)
Hydrogen density-reactivity feedback contributes in two ways,
positive pressure-reactivity feedback and (b) negative temperature-
reactivity feedback.
Since the temperature initially responds faster, the
supposedly unstabilising influence of hydrogen density-feedback is a
significant factor in stabilising dangerous short term transients.
Each of the major coefficients of the system were varied over a
considerable range.
It was found by means of slaLtion that the system
was remarkably insensitive to these variations with three exceptions.
(a) The initial oscillations increase for increased neutron lifetime.
frequency becomes slower.
The
(b) Reduction of the thermal time constant
(thermal inertia) increases the short term oscillations and slightly
increases the overall response time.
(c) The overall response time is
directly proportional to the pressure time constant, while the initial transient is
=neffected by its variation.
The basis for the sensitivity or
insnsitivity is predicted by consideration of root locus plots as fnctions
of the coefficients and is explained from physical considerations in
Section IV.
It
is apparent that the nuclear rocket should be designed with as
small mechanical inertia of the turbopmp as possible and that decrease of
the thermal inertia does not improve the dynamic response.
From a dynamic
-130-
point of view, the thermal inertia should be considerably increased from
that calclted for the proposed design.
However, increase of the thermal
inertia will reduce the efficiency of the engine.
The thermal inertia is
directly proportional to the heat capacity of the graphite-uranium matrix
and inversely proportional to the heat transfer coefficient betveen the
coolant chanel and the fluid.
Consequently, increase of the thermal inertia
increases the tengeratre &op from the maximu core temerature to the
coolant teperatVure
Since a limiting factor of engine operation is the
marbmm core tengeratre, an increase of the therml inertia must deeese
the coolant exit temperature and thereby the engine efficieney.
C.
Controlled Respoase
Analog simulation of transition from a low pover level which is
capable of maintaining a self-sustaining turbopump to fall power by =*no of
proportional and integral feedback of pressure and temerature indicated
that the gain of the various controllers should be small in order to avoid
dangerous overshoots and to meet practical restrictions on maximum control
rod velocity and maxium valve area.
If the gains axe small, the deviation
of the location of the roots in the s-plane from the open loop location is
small.
Consequently, the transition response should and did present
similaities to that of the open loop response.
attaiment of tll
The overall time needed for
pow",r as approximtely fifteen seconds.
oscillations were quickly damped and were not dangerous.
Short term
The sensitivity
* Integral control introduces a root at the origin for zero gain.
This
root moves to the left as the gain is increased. Since it is the dominant
root of the system, the gain of the integral controllers Rust be sufficient to yield the desired asymptotic response. The small values used
in simulation did not increase the amount of time needed for overall
response from that of the open loop. However, reduction of the integral
controller gains below the values used in similation could significantly
retard the overall response time.
-131of the response to variation of the major coefficients was the same.
Relaxation of the restriction on the maximum valve position enabled a faster
response, as expected.
At full power, the gain of the controllers can be increased without
causing dangerous overshoot or violating practical restrictions on the
control mechanisms since only vernier control of pressure and temperature
is required.
Response time for changes in temperature of 100*R and pressure
of 50 psi can be increased by a factor of three without dangerous overshoot
by increasing the controller gains.
A thrust-specific impulse program has been suggested.
The
proposed control system seems to be capable of meeting the control requirements of this program and any others that may conceivably be suggested.
Although ful
power control by valve manipulation is possible, it
has been pointed out that a consequent loss of efficiency must result and
that the feasibility of this method of control depends on the actual variation of reactivity with temperature and pressure at full power as well as
the magnitude of vernier control needed.
D.
Startup
A method of startup has been proposed that utilizes an auxiliary
power source to start the rocket pump.
After sufficient hydrogen pressure
has been attained in a recycling system, the propellant is admitted to the
core and causes positive reactivity in the reactor.
The control mechanisms
are set for an intermediate power level that is capable of sustaining turbopmp operation by itself.
was successful.
Simulation of this method on an analog computer
Although large amounts of reactivity are introduced in a
short amount of time by this procedure, the transient behavior is satisfactory from a dynamic point of view.
The limiting situation seems to be
-132the ability of the core to withstand large transient thermal stress and
thermal shock.
Attainment of the intermediate pover level within a second
by this method does not seem impossible provided the core can withstand the
thermal effects.
E.
A Comparison of the Dynamics of the Proposed Turbopump Configurations
The system pressure developed by the first topping turbine system*
responded exactly to changes in valve position for constant temperature,
while the second had an approximately first order lag superimposed on the
exact response.
For this reason, only the first was completely investigated.
The pressure response of the bleed turbine system was approximately a first
order lag for the same conditions
Furthermore, the stability of the
closed loop of the topping turbine system was insured for any value of
controller gain.
This was not the case with the bleed turbine since a
stability limit exists for the gain of the integral controller.
In the simulation of transition to full power, the bleed turbine
response was slightly faster.
However, the added speed was not significant
enough to justify its use over the topping turbine.
The superior controlled
response of the topping turbine as well as the apparently greater margin of
stability indicate that it is the better system from a dynamic point of
view.
Furthermore, advatages of the topping turbine system in specific
impulse and vehicle weight were mentioned in Section II.
*
The first topping turbine system refers to the configuration with control
valve in front of the turbine; the second refers to the configuration
with the valve behind the turbine.
-133F.
Recommendations for Futher Study
The results of the simplified and general approach of this thesis
indicate that the dynamics of proposed nuclear rocket engines will be
satisfactory.
Further study of the dynamics is,
of course, a necessity.
More sophisticated models will have to be proposed which will take into
consideration such problems as transient effects of fluid inertia and
compressibility.
More complex pump characteristics must be studied.
Distributed paraimeter studies are needed to account for variations of
neutron flux and temperature distributions.
These studies will require
more detailed and specific designs with consequent limitations to the
generalities of the results.
However, actual experimentation with nuclear
rocket dynamics is expensive and difficult.
Consequently, theoretical
analysis should be carried to as great an extent as possible.
In this
regard, this thesis is a first step tovards the solution of the dynamic
problems .
-134LIST OF SYMBOLS
(i
ai
= 1, 2,
unspecified constant that is used in a
number of deivations. In each case, its
specific meaning is defined.
. . .
A
=
cross-sectional area of the control valve
(V subscript) or the turbine (T subscript)
B2
=
buckling
Ci
C
(i
precursor concentration
= 1, 2)
specific heat of the graphite uranium
system
(without subscript)
specific heat at constant pressure of
the coolant
D
=
diamter of a coolant channel
f
friction factor in a coolant channel
f
general reactivity function of temperature
for constant hydrogen density in the core.
thernal utilization
F
-
=
general temperature function of power
density, pressure, and temperature
general valve function of the pressure
ratio across the control valve of the
bleed turbine system
general reactivity function of hydrogen
density for constant core temperature
g
teerature integral controller
G2L
GP
-
pressure proportional controller
G3
G4
pressure integral controller
=
temper&ture proportional controller
G
general pressr~e function of temperature
and pressure
h
heat removal coefficient for a simple
reactor system
I
moment of inertia of turbopump
k
scaling constant
-135=
constant of proportionality
S
analog computer setting, used only in
Figure 14 and Table V.
=
pump constant
=
neutron lifetime
L
=
length of coolant channel
L
=
thermal diffusion length
m
=
mass of simple reactor system
M
=
mass of graphite-uranium core
N
=
number of coolant channels
(i
= 1, 2,
.
..
(i
= 1,2,
.
.
K
.
neutron density. When an asterisk superscript is employed., n* is dimensionless
neutron or power density. The two are
n
the same in
value .
p
=
pressure
PR
=
pressure ratio
p
=
resonance escape factor
=
universal gas constant
R
=
gas constant for hydrogen
R
=
slope of the turbopmp line in the temperature-pressure plane
=
frequency variable of the LaPlace
transformation
t
=
time
T
=
temperature
TIC
=
temperature integral control
TPC
-
temperature proportional control
PIC
=
pressure integral control
PPC
=
pressure proportional control
V
=
valve setting
-135a-
OH
=
negative value of the bare core
reactivity coefficient
=
hydrogen density reactivity coefficient
pressure reactivity coefficient
23
=
1Y T
temperature reactivity coefficient
precursor yield fraction
/4 (i
= 1., 2.,
=
yield fraction of a particular precursor
group
=
ratio of specific heats of the coolant
parameter of stability margin
'7p
(i
//0
= j, 2,
.
.
.)
=
fast effect factor
=
turbine efficiency
-
pump efficiency
=
square root of temperature
-
precursor decay constant for one group
approximation
*
decay constant for a particular group
=
reactivity (with no subscript or with
alphabetical subscript)
=
density (with numerical subscript)
precursor time constant
rn
p
T
7
=
neutron time constant
=
pressure time constant
=
temperature time constant
age
xump input power
56)
turbine output power
mass rate of flow
-136Appendix I:
A.
Calculation of Constants
Calculation of Time Constants Associated with Fluid
Compressibility and Inertia.
Throughout the derivation of the dynamic equations,
it was assumed that the dynamic effects of fluid inertia and
compressibility could be neglected.
This is equivalent to
assuming that the various components of fluid machinery and
fluid transport can be charged instantaneously and that
pressure disturbances are probagated with infinite speed.
It is recognized that this is not the case, but the assumption
has been made that the high frequency transients associated
with charging and transport time constants can be decoupled
from the low frequency transients associated with core heat
capacity and turbopump inertia.
In order to justify the
assumption, the time constants must be calculated and compared.
The information needed for the calculation of the
charging and acoustic time constants are the length and
volume of the component and the average state of the fluid
in the component.
The charging time constant is the amount
of time necessary for a particle of the fluid to flow from
the entrance to the exit and can be calculated from the
following equation:
7-(I-H1)
-137-
where
t0
-
charging time constant
-
density of the fluid
-
mass rate of flow through the component
-
volume of the component
For the pump
2-'..
10 ft 3
-
4.2 lb/ft 3
-
2300 lb/sec
-
0.02 sec
For the bleed turbine
-
20 ft 3
-
.060 lb/ft
-
46 lb/sec
-
.02 sec
For the topping channel
-
20 ft 3
0W
.38 lb/ft
)-
2300 lb/sec
-
.003 sec
-138-
For the coolant channel
m
--
ft 3
18
N
-1
.0676
lb/ft 3
lb/sec
-
sec
.003
-
where N
-
number of channels
In order to calculate the acoustic probagation time
constant, only the temperature of the fluid and the length
(in the direction of flow) is required.
The assumption is
This assumption
made that the perfect gas law is applicable.
can be questioned in the case of the pump.
Investigation of
temperature. -entropy charts of cryogenic hydrogen shows that
the assumption of perfect gas behavior is not
too bad.
The
value calculated by the perfect gas law assumption will be
larger and thus more conservative.
The pertinent equation
is
(1-2)
L
A
where
c
-
71
T
-
average temperature
L
-
length of the component
Rg T
-
speed ,of sound
-139-
For the pump
T
-
800 R
L
-
4 ft
A
0.003 sec
For the bleed turbine
T
-
25000 R
L
-
4 ft
*'A
-
.0003 sec
For the topping turbine
T
-
600 0 R
L
-
4 ft
-
.0007 sec
A
No calculation is made for the main pass since the charging time
constant, which is small, must be greater than the acoustic time
constant since the Mach number in the core is always less than
one.
The figures employed in the above calculations are only
approximate, but accuracy within an order of magnitude is sufficient
to justify the assumption of decoupling the high and low
frequency transients of the fluid dynamics.
-140B.
Calculation of Temperature and Pressure Time Constants
It has been shown in Section III, equations (3-57)
that
MC
K2
T
p
T
avg
T
-To_.
-
2
p
-To
Po
K5
(1-3)
(1-4)
Po
where
M
=
mass of the case
C
-
specific heat of the graphite uranium matrix
Tavg
-
average temperature of the graphite uranium matrix
maximum surface temperature at a point of steady
T0-
state operation
P0
I
K
p
-
coolant inlet stagnation pressure
=
moment of inertia of the turbopump
-
pump constant (See equation (3-24) for specific
meaning of K
p
K2
KS
=
)
constant of proportionality
It
can be seen from the above equations that both
time constants are dependent on power level in that they are
proportional to the ratio of
If the constants can
Po
be calculated at one point of operation (ie. designed point
of operation), they can be calculated at any other point.
All the quantities in (1-3) and (1-4) are known
with exception to K2 and K5
,
but they can be calculated from
known values of total power output and pump power input.
The
equations are rearranged.
T
_avg
-MC
To,
T
-
p
P
2Kp
K 2 PoI/"T
But
K5
(I-5
To
total power output
pump power
input or turbine power output
Po
The resigned point of operation is chosen
K2 Po
Cp (To2 - Tol)
<e)
To- P
Po
2
7p /p
)
(I-6)
Po 2
K
-
To
(K2 Po
-
-
25,000 m &r
137,000 Horse power
-142-
where
-
CP(To2 -Tol)
mass flow rate
-
enthalphy rise of the coolant in passing
through the core
7P
-
efficiency of the pump
-
density of the fluid in the pump
(lp
7/ , and
T
To compute
7-
M
-
10,000 lb
C.
-
.454
TTavg
To
To
I
1
1.4
we take
BTu/lb
0
R
(See Appendix II)
-
5000 * R
-
.55 sec
-
62 ft lb sec2
(at full power)
*
P
*
-
2.14 x 10~-
-
1500 psi
-
2.3 sec
psi sec2
8000 rpm for a
K, is computed by letting the pump speed equal
pressure rise of 1500 psi.
-143C.
Computation of Reacticity Coefficients
Figure 3 is a plot of reactivity versus mean core
The
temperature for various values of mean core pressure.
calculations, based on a Fermi Age model, indicate that
reactivity varies linearly with the square root of core
temperature for constant hydrogen density and also with
hydrogen density for constant core temperature.
-
H
C
The problem is now to compute values of
and
The quantities
7)
T
<
op< H
and
can be computed from
the graph for any value of P and T within the range calculated.
The following partial differential equations can be formed
from (1-7):
0
+
2
(1-8)
T
Since T and
computed from (I-9).
P, T, and
H can be
can be taken from the graph,
Substitution of numerical values of
into (1-8) yields the value of
"
C
"f'H
-144-
A number of points were chosen to calculate
T
-
3970 *K
T
-
3360
T
-
2700
H
YH
MH
-
.232
-
.224
-
.225
0
o< H
K
psi
If the assumptions concerning variation of reactivity with pressure
apH would show no
and temperature were exact, the value of
H
However, the results are accurate enough for our
deviation.
purposes and a mean value of
c2(
-
.226
*K/ psi
Similarly,
T
-
3000 *K
is
chosen.
of points.
C was computed at a number
P
29.7 x 10
-
0
-
400
-
28.0
-
800
-
26.4
-
1200
-
24.8
psi
0
-
* K011/2
Again, the accuracy is satisfactory, and a mean value is chosen
for
C - 27.2 x 104
oK
-1/2
The above values must now be changed to coincide with
reactivity correlation in terms of maximum surface temperature
and inlet coolant stagnation pressure.
They must also be put
in units of degrees Rankine.
This is a simple matter of algebra
since steady state temperature and pressure distributions have
The values chosen for
already been described.
o/C and
H are
6f
(H
D.
1/ 2
-
10-3
*R-
-
0.3
*R/psi
Specification of Arbitrary Design Parameters
In every design, decisions must be made concerning
design goals.
Among these are usually size, power, etc..
Those parameters which must be specified for the general design
of a nuclear rocket are noted below.
A short explanation is
also given explaining the reason for the choice.
(a)
Thrust
-
1,500,000
A large thrust will be necessary to carry the
heavy engine and propellant.
Consequently, the
first nuclear rockets will be in the one million
pound thrust class.
(b)
Maximum core temperature
-
5000 *R
At 5500 *R graphite is unable to retain the
mechanical properties necessary to hold the
engine together.
(c)
Geometrical friction factor,
Stenning
4 fL
D
-
5
has shown that a value in this range
is a good compromise between thrust and specific
impulse.
(d) Void coefficient
-
30%
A value in this range insures criticality and good
heat transfer properties.
(e) Diameter of the coolant channel
-
1/4 inch
The cross sectional area of each channel should be
as small as possible in order to reduce the temperature drop from the maximum core temperature to the
maximum surface temperature.
A value of
D
-
1/4
inch is as small as practically possible.
In order to attain the desired thrust with a
friction factor of f
-
.005 and a void coefficient
of 30% , a core 5 ft in diameter and 5 ft in length
must be chosen.
This is close to ideal from a
criticality standpoint.
(f) Inlet stagnation pressure
-
1500 psi
Sams (14) has shown that higher pressures do not
yield an improvement in overall rocket performance.
-147(g) Pressure ratio across the bleed turbine
-
(h)
-
"
"
(i) Turbine efficiency
(j)
PuMp
(k)
Pump speed
7
-
85%
80%
"-
"
topping
50
8000 RPM
These values are consistent with current rocket
designs.
Using the above variables in the standard equations of
fluid mechanics, thermodynamics, neutron reactor theory, etc.,
fL4 sufficient to determine the design point condition of the
proposed nuclear rocket.
The paper by Stenning
determine the pressure distribution in the core.
17
) is used to
Appendix II:
Relation Between the Mean Core Temperature and
Maximum Surface Temperature.
A lumped parameter analysis implies the assumption
that the core temperature distribution remains in a fundamental mode.
The mode which is most consistent with the
assumption is the temperature distribution that occurs for
steady state operation.
In order to develop the dynamic temperature equation,
the ratio between mean core temperature and maxim= surface
temerature was required.
This ratio is calculated from the
steady state temprature distribution and is assumed constant
in accordance with the philosophy of a lumped parameter
analysis.
The standard equation for isotropic heat conduction
with a distributed source is assuned and the following
assumptions are made:
(a) The power density (heat source) is
constant.
(b) All heat generated is conducted to the
nearest coolant channel.
(c) Axial conduction can be neglected in comparison to radial conduction.
(d) There is no angular variation in temperature
about any coolant channel.
-149-
A unit cell is defined as the circular cylinder,
surrounding each coolant channel
coolant channel.
that is cooled by the
In accordance with assumption (b), the
heat flow across the outer boundary of the cell is zero.
At any radial crosssection of any unit cell, the
following equation describes the radial temperature distribution,
k
r
d
dr
r
dT
dr
-
0
(II-1)
where:
k - heat conductivity of the graphite-uranium matrix.
r - radial distance from the center of the cell.
T - temperature in the matrix.
S -'
power density.
The boundary conditions are:
dT
dr
/
R
(11-2)
0
outer radius of the unit cell
where RT(RI) - T
where R
- radius of the coolant channel.
(11-3)
-150-
Equation (I-1) is put in non-dimensional form by the
following substitutions:
(11-4)
R, p
r
(II- 5)
T -T I e
The resulting heat conduction equation is
1
p
d
+
2
d2
dp
+
dp
dp
/p-
--
+
s
-
0
- 0
(II-6)
(11-7)
(II-8)
&(l) .
where
k
T
R
R/
-
The solution to the homogeneous part of the equation is
In
H
9H
C1
2
p
+
(35)
C2
M homogeneous temperature
-
arbitrary constants.
The duplication in notation is mpade to provide a mnemonic
meaning of the variables.
with preious nota
appendix.
There should be no confusion
f~t~since
the above refers only to this
-151-
The particular solution is
(35)
2
P
(II-9)
4
Since the heat conduction equation is linear, the two solutions
may be superimposed to yield a complete solution .
of the boundary condition at r
R
-
Application
yields
2
C
2
-
Application of the boundary condition at r
R1 yields
+ s
C2
4
p
P
-
0-
(II-11)
22
In p +
1
The mean radial temperature ( 6
+
-
2
2
(II-12)
) may be compatdA by thi
following integration:
2 77 p & (p) dp
(II-13)
7 (/%2
m
After manipulation, we obtain
1 + s
Po
inpo
Po
- 1
Po2
(po+
+ 1
+2
1)
4
8
(II-14)
The equation is consistent since
(a)
s
-
0
or
(b)
po
-
8m reduces to one for
If the void coefficient of the reactor is taken as
30%.o
-
-
/.82
-
Substitution of this value of po yields
&m -
-
1 + 0.11s
TI
we assign
To compute a
S-
109
BTU
3
hr ft
k
-
O/25in
-
58.1
BTu
hr
T
(II-15)
-
3200
ft
0R
*R
2
S -Mk
Thus T
1064 T
.582
(1-16)
Since only a 6% variation occurs between the surface
temperature and the mean radial temperature at the same radial
cross-section, deviation from the steady state distribution is
not very significant.
The surface temerature of the unit cell increases
linearly along the length of the channel since (a) the power
density is constant, (b) the heat transfer coefficient between
-153-
the surface temperature and the bulk temperature of the coolant
is assumed constant, and (c) axial heat conduction has been
neglected.
Consequently, the ratio of mean core temperature
to maximum surface temperature is
(1/2) (106)
avg
Ts9T(surface,
T(surface, entrance) -T(surface,
exit)
exit)
(11-17)
Substitution of these temperatures yields the value of the
desired ratio.
T
T1.4
(11-18)
-154Appendix III:
Pressure Ratios Across the Turbine and Control
Valve of the Topping Turbine System, Case I.
First we consider the pressure ratio across the
turbine.
The necessary equations are
2
P
-P
--
(III-1)
g
AT '0
P
(04
(111-2)
R T0 4
aI P
6
a P
a2 _06
(III-3)
06
T03 - a3 Toi.
T0 3 w T0 4
(111-5)
-- 4a
(III-6)
P0 5
where
PO4
-
stagnation pressure in front of the turbine.
P0 5 - stagnation pressure behind the turbine.
mass flow rate through turbine.
/-4-
AT
/04
R
-
cross-sectional area of turbine nozzles.
-
stagnation density in front of turbine.
-gas
constant for hydrogen.
T4
PO6
T03
->
-
stagnation temperature in front of turbine.
-
constant of proportionality
-
stagnation pressure at core exit.
-
maxinn surface temperature of a coolant channel.
-
stagnation temperature at core exit.
-
stagnation temperature in front of control valve.
-
stagnation temperature behind control valve.
are removed from (III-1) by substitution of
(004
and
(III-2) and (IIIa2
PO4
*
2
2
R
T04
(III
C5
T0 6 AT
-6)
PO4
Equation (III-6) is divided by P0 5 to form the desired ratio.
P0
P05
a 2 R
T
P6
P
(111-7)
A
T0 6
P0 4
P0 5
T04 is replaced by T0 3 , (III-5)
( C - 1, 2, ... ) will be used throughout
The symbol a;
Appendices III, IV, and y as constants which can be calculated
but the calculation is unnecessary. The use of a ;
allows us
to use equalities rather than proportionalities.
-156-
can now be written as
Equation (III-7)
P0
aT
P05
R
AT
T0
06
P0
P04
P0
P05
P06
(1,11-8)
P05
It can be seen from equations (III-4) and (1II-6) that
T
03
0O6
and
06 are constant. Consequently, the ratio 04
P05
P0 5
be constant since all other terms appearing in
must also
(111-8) are
We may now conclude that the pressure ratio across
constant.
the turbine remains constant0
Next we consider the pressure ratio across the valve.
The only equations that need to be added are:
P
A)
04
03
-
(111=9)
A
v
03
P03
(111-10)
R T0
3
03
where
stagnation pressure in front of the valve.
P03
-
T03
m
As before,
stagnation density in front of the valve.
stagnat ion teMerature in front of the valve.
and
60
03 are eliminated from (III-9) by
substitution of (III-10) and (111-3).
divided by PO
*5
Equation (111-9) is
-157-
a 22 P 2
2
06.
P
P
Q3.
Q4
.
P0 5
P0 5
R T
03
T06
v
03
(III-l1)
05
Regrouping (11-12) yields
22
P04
P0 5
P0
The ratios,
5
S06,
04
P0 5
P0 5
Consequently,
AV
03
R
P 6P
P0
and
P0 3
5
03
P
T03
P0 5
T0 6
IN2
(I1
are all constant.
T06
must be a function only of A
.
04
Since
V0
P0 5
5
is constant, we can define
P0 4
where
V(A,)
-
V
(A)
(11-13)
is defined as a fictitious value setting that
is dependent only on the actual value area.
Appendix IV:
-158Pressure Ratio Across the Valve and Turbine
of the Topping Turbine System, Case II.
In order to show that the pressure ratio across the
valve and turbine is dependent only on the valve setting, the
following equations must be considered:
pressure drop across the turbine
2,
03
04
AT
/003
(IV-1)
pressure drop across the valve
2
P04 '
05
(WV-2)
-
perfect gas law
- 03
RT 0
{
A'0
(IV-3)
3
P04
R-
04
(IV-4)
04
temperature ratio across the valve
T0 4
-
1
-
aa1
(IV-5)
05
flow rate
0
(IV-6)
T06
ratio of coolant exit temperatures at the end of the first
passes through the core
and secd
-
T06
constant
(IV-7)
-159-
core pressure ratio
P0 5
P06
-
constant
-
stagnation pressure in front of turbine
M
stagnation pressure behind turbine
-
stagnation pressure behind valve
-
stagnation pressure at core exit
-
stagnation temperature in front of turbine
-
stagnation temperature behind turbine
-
stagnation temperature behind valve
-
stagnation temperature at core exit
-
stagnation density in front of turbine
T
T04
-
stagnation density behind turbine
AT
-
cross-sectional area of turbine nozzle&
-
valve area
-
mass flow rate through turbine valve
-
gas constant for hydrogen
(IV-8)
where
P
P04
0
5
P0 6
T0 5
/03
AT
A
R
The two pressure drop equations,
(IV-1)
and (IV-2),
are transformed in the same manner as in Appendix III,
flow-rate,
&-,
The
is removed by substitution of (IV-6); the
-160-
density is eliminated by applying the perfect gas law.
Both
equations are divided by P0S to form dimensionless ratios.
These operations yield
P03
P04
P 05
P05
0
0
05
a 2
AT2R
06
P06
T03
P05
P03
T06
T
06
06
04
P05
04
T0 6
P06
06
T05
T03
05
P0 5
03
06
--
Av2
The above equations
are
regrouped ,
r_
-
03
a 2 R
05
05
P
P
05
P05
0 03
Av2
06 2
0505
_
AT
a2R
P
(IV-1)
P
04
05
T
T
T03
T06
(IV-12)
03PP4
Since
P 5and
R
P
T0T
T6are cosnstant, the above two equations can
can be written as
Z-
05
a2O4
(IV-13)
A05 03
0
04
3
3
05
T04
05
Av2
P4
T03
(IV12)
-161-
is the temperature ratio across the turbine and
may be replaced by a function of the pressure ratio.
If we
assume that the turbine is adiabatic and isentropic (i.e. 100%
efficient),
then
(IV-15)
T
P
constant
-
A polytropic expansion can be assumed that is consistent with
an efficiency less than 100%.
In this case
L'n
P
where
n <
n
Y1
T
-
constant
<
T
for
(IV-16)
100%
The polytropic expansion is a good approximation to the actual
turbine performance,
T
04,
T3
Consequently,
04
P0 3
n
n-1
n-1
n-1
P
-
04
P0 5
n
-05
P0
n
3
(IV-17)
The temperature ratio
To4
is eliminated from (IV-14)
by
T0 3
substitution or (IV-17).
are now
The two major pressure ratio equations
-162-
a2
P0 3
P05
P0 5
P0 5
(IV-18)
03
a83
P0 4
P05
-
2
A
P0 5
P0 4
n-i
04 n
P0 5
n-1
n
P0 5
P0 3
(IV-19)
We now have two equations for two pressure ratios,
and
P0 5
04
Equation (IV-18) can be solved for
05
04
05
function of
.
is then eliminated from equation (IV-19)
03P
05
and an expression for
P0
5
P03
-
function of A
V
results.
stitution of this result into (IV-18) shows that
P0 4
Submust also
P0 5
be a function of A
We may define a fictitious valve setting
P0 5
(Av
v
This expression is
(IV-20)
then substituted into the turbine power
equation of Section III.
-163Development of the Dynamic Pressure Equations
Appendix V:
Under the Assumption of Choked Flow in the
Topping Turbine
If the topping turbine is a sonic turbine, the previous
equation for flow is replaced by the equation for choked flow.
In Case I of the proposed topping turbine drives, the equation
is
S04
P0 4
(V-1)
constant
-
A similar equation describes the flow at the exit of the core.
(V-2)
constant
-
P06
Consequently, the following ratio may be formed
-P
06
06
constant
(V-3)
T
P
It
has been previously demonstrated that
is
constant.
Furthermore, T0 4 equals T0 3 since the flow through the valve
is adiabatic.
Thus,
the following ratio may be formed by
substitution into (V-3):,
P0 4
P05
06
05
Tn03
constant
(V4)
-164-
Considerations presented in Section III have shown that
T03
T0
is constant.
Thus
6
04-- constant
P05
(V-5)
Therefore, the pressure ratio across the turbine is constant
and the turbine output power must be proportional to 60 T03'
but this is replaced by P
06,
The expression for
T
s
is therefore the same as before.
The pressure ratio across the value depends on the
value setting.
P03
04
-
(V-6)
-
2
V
A
03
The same manipulation as shown in Appendix III yields the
following expression:
Since
P0 4
a
P0 5
p0 5
A 2
v
04
p0 5
that
P
02
p0 5
P0 5
T0
3
,
1 R
and
P0
P05
P0
3
(V-7)
P03
02 are constant we conclude
p0 3
depends only on value position.
Therefore the
-165-
expression of time rate of change of kinetic energy and pump
output power will be the same as before.
The dynamic pressure
equation for Case I of the topping turbine drives is the same
for sonic flow in the turbine as for incompressible flow.
In
Case II of the proposed topping turbine drives,
the turbine flow equation is
-
constant
(V-8)
03
Under this condition,
the following ratio may be formed as a
result of choking in the rocket nozzle
P3
03
P
06
Since
_0
S06
PO
I
T606
constant
(V-9)
0
03
P 7
and
P03
T
_03
-s-n
are constant,
-er
l--o
the ratio of
T06
P02
is
constant.
Therefore the ratio of pump output pressure
P0 5
does not depend on the control valve setting.
This is similar
to the bleed turbine system where the two pressures were
synonomouse.
Consequently,
the time rate of change of kinetic
energy and pump power terms are the same as the bleed turbine
system rather than the original topping turbine system.
-166-
It can be shown by a similar procedure as presented
in Appendix IV that the pressure ratio across the turbine is
a function of only the valve area.
Po4
(V-10)
P05
Av 2/004
a
P0 4 - 1
P0 5
But
Since
T04
--- 4
T
T0 3
is
P06
P06
P05
P0 4
a1 R
P06
P0 6
P05
T0 4
T0 3
AV
P0 5
P0 5
P04
T03
T06
P0 3
must depend
-
-g
4v
n-1
n
P04
equal to
P03
T
P0 3
P05
R
and
are constant,
-
05
T06
P04
only on valve area.
The turbine output power is proportional to
~4
/,,O
0 If
the following definition is made
/1
P0 4
V (AV)
(V-11)
P0 3
the turbine power output is expressed by
IT
P0
5
'Ts
V (AV)
(V-12)
Therefore, the dynamic pressure equation is the same as the
bleed turbine rather than the equation that results for
incompressible flow in the topping turbine (Case II).
-168Appendix VI:
Formation of the Open Loop Stability Criterion by
Application of Routh's Technique
Routh's technique is employed to investigate the
location in the complex plane of the roots of a polynomial
If the polynomial is of
whose coefficients are all real.
first or second order, the location of the roots can be
computed directly.
Direct computation of the roots of a
third order polynomial is tedious.
If the only question is
to determine whether the roots are in the left or the right
half plane, there is no need to compute the exact roots.
Routh's technique is easily applied.
Consider a general third order polynomial with real
coefficients.
a s3
a 2a 2
+
a3s
+
+
a4
-
0
(VI-1)
All roots of (VI-l) lie in. the left'half plane if
(a) all coefficients are the same sign
(b) no coefficients are zero
(c) the following grouping of coefficients is greater
than zero:
a2 a3
-
a1 a4
>
0
(VI-2)
-169-
In the case of the polynomial formulated by
expanding the determinent of the coefficient matrix, (a)
and (b) are satisfied if
> C<
fT
.
(VI-3)
(c) is satisfied if
If
(VI-4) is
expanded we obtain
Since each constant is assumed positive, (c) does not impose
any additional
restrictions.
The rootsof a fourth order polynomial, with
real
coefficients
a Is
+
a 2 s3
a3 s2
+
+
a
S
+
ag.
(VI-5)
lie in the left half plane if the above restrictions are
satisfied as well as an additional restriction oh a second
grouping of coefficients.
a2 a3 a4
aI a
2
a2
8
2
a5 >
0
(VI-6)
Higher order polynomials have further restrictions
concerning grouping of the coefficients.
Routh's criterion
-170-
becomes increasingly difficult to apply if algebratic
symbolism is to be retained, but is very useful if
nurmerical coefficients are permitted.
References 19 and
36 should be consulted for further details.
-171Appendix VII:
Photograph and Description of the Analog
Computer Facility
The Philbrick Analog Computer, pictured on the
following page, was made available through the courtesy of
the Mechanical Engineering Department of the Massachusetts
Institute of Technology and is under the direction of
Professor Henry X. Paynter.
The computer was newly installed
at M. I. T. during this past year.
It
is versatile and
accurate although somewhat limited in capacity.
Since it
was attempted to maintain a simplicity and generality in
the analog study, a large machine was not necessary.
The
above computer suited these purposes exactly.
The main componeat, , or building block, of the
computer is the "K5-U Universal Operator."
are available.
Twenty of these
This is a linear component capable of summing
or integrating four inputs,
Each input can be individually
inverted in sign and amplified over a wide range.
a constant can be added to the output.
In addition,
The additive constant
simulates the initial boundary condition for the integration
process.
Since integration must start at a definite point
in time, a clamping mechanism that can be controlled from a
central unit or from each K5-U holds the integrators at a
-172-
constant voltage until integration is desired,
At the end of
the integration, the same mechanism returns the output voltage
of the K5-U to its initial value.
thereby be obtained.
Repetitive solutions can
Consequently, the effect of varying any
of the coefficients is easily visibie by poetraying tha output voltage of the repetitive solution on an oscilloscope.
Warning lights on each component indicate saturation
(i.e.
an output voltage greater than the capacity of the
component)
The range of voltage output for the K5-U and all
other components of the computer is negative fifty volts to
positive fifty volts.
Four K5-M multiplier-divider components are
available.
These are capable of multiplying two voltages and
dividing by a third.
The variable voltages may be replaced
by an adjustable scaling constant.
In addition, a constant
voltage can be added to the output if a scaling constant is
not required.
accurate.
These components are quite versatile and
Unfortunately, four K5-M components were not
sufficient to simulate all the non-linearities of the nuclear
rocket dynamics,
Six older and less versatile multiplier or divider
components are provided.
There were sufficient to simulate
-173-
all the remaining non-linearities.
They are capable of
accepting only two voltages which may be either multiplied
or divided.
The scaling constant is
set 'at twenty-five
volts.
Step function, ramp function, arbitrary function,
and randem noise generators are included in the facility.
Only the step function generator was required for the rocket
problem.
The results were recorded by photographing the
oscilloscope screen.
Since a Polaroid camera was employed
the results could be viewed within minutes after the
photograph was taken.
Thirteen K5-U components are visible in the upper
half of the central panel.
The other two components in the
central panel are K5-M units.
The older multiplier or
divider components are the unpaneled electronic units in
the upper half of the right hand panel.
The unpaneled unit
in the lower half is the randem noise generator.
The left
hand panel contains more K5-M and K5-U components, the,
function generators and controls.
The oscilloscope and
camera are visible to the left of the computer.
ANALOG COMPUTER FACILITY OF THE MECHANICAL ENGINEERING
DEPARTMENT M.I.T.
-174Pressure Response to Valve Motion at Constant
Appendix VIII:
Temperature
A.
Bleed Turbine System
The equation governing the pressure response to
valve motion for constant temperature has been shown in
Section IV, equation (4-37) .
P
p
V
It is repeated below.
(P )
=
(VIII-1)
The equation can be put on non-dimensional form by substituting
(VIII-2)
t
Throughout this appendix, the asterisk superscript will be
omitted.
Equation (VIII-l) is
-
If V (t)
now
PV - P2
(VIII-3)
is a step change from V (0) - 1 to V (0+) - V, the
above equation can be integrated.
dP
p (V
dx +
(VIII-4)
p)
where C is an arbitrary constant which may be calculated from
the following boundary condition
P (0) - V (0) - 1
(VIII-5)
Integration of (VIII-4) yields
ln P - In (V = P) = Vx + C
(VIII-6)
in
(VIII-7)
Or
-
Vx+ CI
-175-
Or
C
Vx+
-P
whereK
Vx
(VIII.8)
1z
. C
-
Taking the reciprocal of both sides of equation (VIII-8) yields
V
V -PVx
K
+
1
(VIII-9)
The boundary condition of (VIII-5) is
K
sufficient to determine K.
(VIII-10)
V-1
-
Thus, the expression of the time dependent pressure to a step
change in valve position is
P (
/
p
)
(VIII-ll)
-V
(V-1)
1. -Vt/ 7' p
+
1
A linear approximation to this expression may be
found by solution of the following equation:
v*- P
-
(VIII-12)
dx-
where
*
P
-
P
*
1
-1
If V* (x) - step change, the solution is straight forward
and may be computed by any of a number of methods.
method of LaPlace transforms is easy to apply.
The
-176*
-Vt/
V* (l
*
where V* (0)
-
(VIII-13)
0
V* (+
B,
Topping Turbine System - Case I
The equation to be solved for this system is
repeated below.
d
-~
*
* 2
*
V )V
'pM~,t
V*
(VIII-14)
As before, the equation is put in dimensionless form and the
superscripts are omitted.
(VIII-15)
d
The indicated differentiation is performed.
The dot tk&itibn
for derivatives with respect to x is introduced to simplify
the expression.
P
V
V
P
V
P
2
2
Rearranging yields
2
*
PV + Pi
-
2
P V + PV
(VIII-16)
(VIII-17)
It should be noticed that the left hand side of (VIII-17) is
the same as the right hand side if P and V are interchanged.
-177-
The boundary condition for (VIII-10) is
P (0)
-
V (0)
-
(VIII-18)
1
The symietry of (VIII-17) indicates that since V (Q) * P (0)
$ (0)
then P (0) -
If the time derivative of (VIII-17) is taken,.we
obtain
PV2 + 2**
P + P
2+
+ P
+
(VIII-19)
+ 9
Again, the two sides of the equation are symmetric with respect
to pressure and valve setting,
P (0)
-
Since we know P (0) - V (0) and
V (0), then
P
(0)
-
(VIII-20)
(0)
This procedure can be extended to any order with the
equivalent result.
P and its derivatives at x - 0 (i.e. t - o)
are always equal to V and its corresponding derivatives.
If both P and V are expanded in a Taylor Series.
about x
o,
it
is clear that P - V for any value of x since
their derivatives are always equal.
Furthermore, if P - V
at some time x, , which is greater than zero, the entire
argusment can be repeated at x - x
rather than at the x - o.
Consequently, we conclude that
P ( t
t/
)
(VIII-21)
-178-
The same result occurs for a linear approximation
to (VIII-14).
C.
Topping Turbine System, Case II
For this system, the
d
**
-
pertinent equation is
P(V
2
*
dtV
(VIII-22)
V
After the usual simplifications we obtain
d-
2IMP
mo '(VIII-23)
Unfortunately, this equation is
not symmetric in P and V.
In
order to obtain some knowledge of the pressure response to.-a
step change in the valve position, a linear approximation of
(VIII-23) is solved.
dP*
3V* +
dVP*
(VIII-24)
dx
The method of LaPlace transforms is suitable here.
P,
-
V* (3 - 2 .
P*
-
P-1
where
V*(O) -0
0~O~
-*
t /
p
)
(VIII-25)
-179-
This response is presented graphically in Figure 24 for
V
-
It should be noticed that the step change
0.26.
in valve position causes an immediate and equal step change
in pressure.
We expect the response of the two topping turbines
to be the same during the initial transient, since the only
difference between the two is the increased pressure ratio
that appears across the turbine of the second system for an
increase in valve setting.
equation (VIII-23),
Consequently, in solving
a boundary condition is
imposed which is
consistent with the initial step change in pressure.
*
*
V
(0)
-
V
P
(0) -
V
(rather than one, which is its value before
the step change.)
is heuristic.
It is recognized that the above argiument
However, the result obtained is in go9d
agreement with the linear model and with physical intuition.
The difficulty arises from the
dV
term.
The derivative of
a step change is not an analytic function. This problem was
dV
does not occur.
avoided with the bleed turbine since
In the topping turbine, Case I, the solution was general and
did not depend on a specific valve change.
-
Let
180-
= P
r
This variable is substituted into
(VIII-23)
r V3 - r 2 V
dr
(VII 1-26)
the boundary condition is
r (o) -
1
(VII 1-27)
Equation (VIII-26) may be solved in the same manner as that
employed for solution of the pressure response of the bleed
turbine.
r
-
V2
3
1 + (V -V1
(VIII-28)
In terms of pressure, we have
P -
V3
3
1 + (V21),
(VIII-29)
-V
This response is correct provided the initial change
of pressure is equal to the step change in valve.
The con-
clusions that are drawn from this solution could also be
drawn from the linear model.
The lack of rigor in the non-
linear solution of this turbo-pump system is not critical in
comparing the dynamics of the various turbo-pump systems.
y
-181BIBLIOGRAPHY
1. L. R. Shepherd and A. V. Cleaver, "The Atomic Rocket," Journal of the
British Interplanetary Society 7 (1948.
Continued in: 8 (1949) and LO (1949).
2.
R. E . Schreiber, "Los Alamos I Project Rover," Nucleonics (July, 1958).
3.
."A Closer Look at the Real Kiwi-At " Nucleonics 18 (April,1960).
4.
"Space Flight with Nuclear Power Moving into the Foreground,"
Nucleonics 18 (May, 1960).
5.
E. Bergaust, "Russian Atomic Rockets Underway," Missiles and Rockets
1 (October, 1956).
6.
A. H. Shapiro, The Dynamics and Thermodynamics of Compressible Fluid
Flow, The Ronald Press Company (1953).
7.
J. F. Tormey, "Liquid Rocket Propellants - Is There an Energy Limit?"
Ind. and Eng. Chem. 22 (Sept., 1957).
8.
M. A. Schultz, Control of Nuclear Reactors and Power Plants, McGraw
Hill (1955)
9.
A. M. Weinberg and E. P. Wigner, The Phyical Theo
Reactors, The University of Chicago Press'(195)-
of Neutron Chain
10.
K. W. Gatland, "Atomic Rockets," Aviation Week 48, (June, 1948).
11.
B. R. Felix, "Dynamic Analysis of a Nuclear Rocket Engine System,"
Journal of the American Rocket Society (Nov., 1959).
12.
Y. Yoshitani, "The Thermal Performance of Homogeneous Graphite Reactors,"
S.M. Thesis, Nuclear Engineering Department, M.I.T. (June, 1960).
13.
M. H. Rosenblum, W. T. Rinehart, and T. L. Thompson, "Rocket Propulsion
with Nuclear Energy," American Rocket Society Paper 559-57.
14.
E. W. Sam, "Performance of Nuclear Rockets for Large-Payload, EarthSatellite Boosters," Institute of the Aeronautical Sciences Paper 59-94.
15.
J. J. Newgard and M. M. Levoy, "Consideration in the Design of a
Nuclear Rocket," Nuclear Science and Engineering 7 (April, 1960) .
16.
H. L. Reynolds, "Critical Measurements and Calculations for Enricheduranium Graphite-moderated Systems", Proceedings of the Second
International Conference on the Peaceful Uses of Atomic Energy,
Geneva 12, p/2408, 632 (1958F
17.
A. H. Stenning, "A Rapid Approximate Method for Analyzing Nuclear
Rocket Performance," Journal of the American Rocket Society,
(Feb., 1960).
-18218.
C. H. Westcott, "Effective Cross Section Values for Well-Moderated
Thermal Reactor Spectra (1958 Revision), Atomic Energy of Canada Ltd.
#670 (Aug., 1958).
19.
Newton, Goul, and Kaiser, Analytical Design of Linear Feedback Control,
Wiley and Sons, (1957)
20.
E. R. G. Eckert, Introduction to the Transfer of Heat and Mass.
McGraw-Hill (195OT .-
21.
H. Smets, "Low and High Power Nuclear Reactor Kinetics " Sc.D. Thesis,
Department of Chemical Engineering, M.I.T. (June, 1958$.
22.
S. Glasstone and M. C. Edlund, The Elements of Nuclear Reactor Theo
Van Nostrand, Inc. (1952).
23.
F. B. Hildebrand, Methods of Applied Mathematics, Prentice-Halls Inc.
(1955).
24.
J. G. Truxal, Control System Synthesis, McGraw-Hill (1955).
25.
J. H. Keenan, Thermodynamics, John Wiley and Sons (1941).
26.
C. J. Wang, H. R. Lawrence, and G. W. Anthony. Optinim Thrust Programming of Nuclear Rockets," American Rocket Society Paper 691-58.
27.
E. P. Gyftopoulos, "Transfer Function Representation of Nuclear Power
Plants," Presented: Conference on "Transfer Function Measurements and
Reactor Stability Analysis," Argonne, Illinois (May, 1960) .
28.
E. P. Gyftopoulos and J. Devooght, "Effect of Delay Neutrons on Nonlinear Reactor Stability," Nuclear Science and Engineering
,(Aug., 1960).
29.
R.~ W. Buesard and R.. D. DeLauer, Nuclear Rocket Propulsion,
McGraw-Hill, Inc . (1958)
30.
A. S. Jackson, Analog Comptation, McGraw-Hill, (1956).
31.
G. A. Korn and T . M. Korn, Electronic Analog Computers, McGraw-Hill
(1956)
32.
A. H. Stenning and H. P. Smith, "The Stability and Control of Nuclear
Rocket Engines," American Rocket Society Paper 1239-60.
33.
P. D. Hansen, "The Dynamics of Heat Exchange Process," Sc.D. Thesis,
Mechanical Engineering Department, M.I.T. (Feb., 1960).
34.
G. P. Sutton, "Rocket Propulsion Systems for Interplanetary Flight,"
1959 Minta Martin Lecture, published by Institute of the Aeronautical
Sciences.
35.
F. B. Hildebrand, Advanced Calculus for Engineers, Prentice Hallt Inc.
(1949).
36.
N. F. Gardner and J. L. Barnes, Transients in Linear Systems, John
Wiley and Sons (1942).