ON FINDING MULTIPLE SOLUTIONS TO A SINGULARLY PERTURBED NEUMANN PROBLEM
advertisement

ON FINDING MULTIPLE SOLUTIONS TO A SINGULARLY
PERTURBED NEUMANN PROBLEM
ZIQING XIE∗ , YONGJUN YUAN∗ AND JIANXIN ZHOU†
Abstract. In this paper, in order to numerically solve for multiple positive solutions to a singularly perturbed Neumann boundary value problem in mathematical biology and other applications,
a local minimax method is modified with new local mesh refinement and other strategies. Algorithm
convergence and other related properties are verified. Motivated by the numerical algorithm and
convinced by the numerical results, a Morse index approach is used to identify the Morse index of
the root solution u1ε = 1 at any perturbation value, its bifurcation points and then the critical perturbation value. Many interesting numerical solutions are computed for the first time and displayed
with their contours and mesh profiles to illustrate the theory and method.
Key words. Singularly perturbed Neumann problem, critical perturbation value, local mesh
refinement, minimax method
AMS subject classifications. 58E05, 58E07, 35J20, 65N20
1. Introduction. Consider finding multiple positive solutions to the singularly
perturbed semilinear elliptic Neumann boundary value problem
{
ε∆u − u + |u|p−1 u = 0 in Ω,
(1.1)
∂u
on ∂Ω,
∂n = 0
where ∆ =
N
∑
i=1
∂2
∂x2i
is the Laplace operator, Ω is a bounded open domain in RN with
a smooth boundary ∂Ω, ε is a positive parameter, the exponent p satisfies 1 < p <
(N + 2)/(N − 2) for N ≥ 3 and 1 < p < ∞ for N = 2 and n denotes the unit outward
normal at x ∈ ∂Ω. The energy functional corresponding to (1.1) is
∫
∫
1
1
(1.2)
Iε (u) =
(ε|∇u|2 + u2 )dx −
|u|p+1 dx.
2 Ω
p+1 Ω
It is clear that solutions to (1.1) correspond to critical points u∗ of Iε , i.e., Iε′ (u∗ ) = 0,
where Iε′ (u∗ ) ∈ W −1,2 (Ω) is the Frechet derivative of Iε at u∗ and its canonical
dual in H 1 = W 1,2 (Ω) will be denoted by ∇Iε (u∗ ). From the Morse theory, for a
critical point u∗ , let H 1 = H − ⊕ H 0 ⊕ H + where H − , H 0 , H + are respectively
the maximum negative definite, null and positive definite orthogonal subspaces of the
linear operator Iε′′ (u∗ ) in H 1 (Ω) with dim(H 0 ) < ∞, then the Morse Index of u∗ is
defined by MI(u∗ ) = dim(H − ), i.e., the maximum dimension of a space containing
decreasing directions at u∗ . So the Morse index is used in the literature to measure
the instability of a critical point. u∗ is nondegenerate if H 0 = {0}. Otherwise u∗ is
degenerate and dim(H 0 ) is called its nullity. Although sign-changing solutions exist,
we are mainly interested in finding nontrivial positive solutions, since in a typical
physical application, a solution uε represents a density function. Obviously u0ε ≡ 0,
u−1
≡ −1 and u1ε ≡ 1 are the only trivial solutions for all ε. u0ε is the only local
ε
∗
College of Mathematics and Computer Science, Hunan Normal University, Changsha, Hunan 410081, China. (ziqingxie@yahoo.com.cn and yuanyongjun1983@yahoo.com.cn). Supported
by NNSF of China (10811120282/10871066/11171104) and the Project of Scientific Research Fund
of Hunan Province Education Department (09k025).,
† Texas A&M University, College Station, TX 77843, USA. (jzhou@math.tamu.edu). Supported
in part by NSF DMS-0713872/0820327/1115384
1
2
XIE, YUAN and ZHOU
minimum point of Iε so stable and will not bifurcate. All other solutions are unstable.
u1ε will bifurcate to other positive solutions as ε decreases and generate a solution
branch. Thus we call u1ε a root solution. Among all nontrivial unstable solutions, the
one with the least energy is called a least energy solution, which need not be unique.
So a least energy solution is not a point with the least energy. In particular, for
each u ̸= 0 in H 1 , we have limt→∞ Iε (tu) = −∞. Thus Iε is indefinite and a global
minimum of Iε cannot be expected.
Eq. (1.1) is known as the stationary equation of the Kelleregal system in chemotaxis or the limiting stationary equation of the so-called Gierer-Meinhardt system in
biological pattern formation (see, e.g., [4, 23, 7, 8, 9, 16] for more details). Eq. (1.1)
can also be obtained from a chemical diffusion process [4, 13]. When N = 1, a lot of
work has been done by I. Takagi [19]. For N ≥ 2, the situation becomes much more
interesting. The pioneering work [13, 14, 15, 16] verified the existence of a single-peak
spike-layer solution uε to (1.1) in 1993. Ni and Takagi in [15, 16] showed that, for
ε sufficiently small, the least-energy solution has only one local maximum point Pε
and Pε ∈ ∂Ω. Moreover, H(Pε ) → maxP ∈∂Ω H(P ) as ε → 0, where H(P ) is the
mean curvature of P at ∂Ω. In [20], some multiplicity results were obtained by using
Ljusternik-Schnirelman category. [7] proved the existence of solutions with multiple
peaks on the boundary where the mean curvature H(P) attains its local maximum.
Gui and Wei [9] pointed out that, for any fixed positive integer k, there exists a solution with exactly k boundary peaks located at the points where the local minimum
value of H(P ) is attained. In [2], Cao and Kupper proved the existence of solutions
with k boundary peaks located at the points where H(P ) attains its local maximum
or minimum on ∂Ω for k = 1, 2. They also gave an asymptotic expansion of these
solutions. Further the boundary layer with the diameter O(ε) and the exponential
decay of the solutions outside the boundary layers was proved. Gui, Wei and Winter
also investigated solutions with multiple interior peaks [8]. It was shown that, for
any fixed positive integer k, there exists a solution of eq. (1.1) with exactly k interior peaks located at the points Pε1 , Pε2 , · · · , Pεk such that φk (Pε1 , · · · , Pεk ) converges
to max {φk (P 1 , · · · , P k )|P i ∈ Ω, i = 1, · · · , k } as ε → 0, where
φk (P 1 , · · · , P k ) = min {dist (P i , ∂Ω),
|P j − P l |
| i, j, l = 1, · · · , k, j ̸= l }.
2
In [6], some crucial behaviors of the function φk were proved. As ε becomes large,
(1.1) will eventually lose all of its one-sign solutions except the trivial ones [13]. In
[12],1 when Ω is a ball, Lin and Ni proved the existence of (but did not identify) the
critical perturbation value εc for which there is no nontrivial positive solution if ε > εc
and there is at least one nontrivial positive solution if ε < εc . In Proposition 3.1 of
[14], Ni and Takagi established a sufficient condition for a bifurcation point along ε.
The purpose of this paper is to develop some efficient and reliable numerical
method and its related theory for finding multiple positive solutions to (1.1). Since
there could be many even infinitely many positive solutions to (1.1), we aim to find
at least first few positive solutions (in order of their energy levels) and those typical
ones whose properties have been predicted by existing theoretical results.
In terms of numerical methods for finding multiple solutions to the singularly
perturbed Neumann problem, there is little work in the literature. The most closely
1 The authors thank Prof. J.P. Shi for providing us with this reference after the original submission
of this paper.
SOLVING SINGULARLY PERTURBED NEUMANN PROBLEMS
3
related numerical results are done for the Henon equation with a zero Dirichlet boundary condition, see, e.g., [10, 11, 24, 3]. In this paper we try to modify the local
minimax method (LMM) developed in [10, 11] to solve for multiple positive solutions to (1.1). Briefly LMM is an implementation of a two level optimization method
min max J(v) where the closed subspace L is used as a support to find an unstau∈SL⊥ v∈[u,L]
ble solution (as a minimum) in the higher energy level. So previously found solutions
and trivial solutions with lower Morse index will be put in L. Thus solutions will be
computed in the order of their energy level or their Morse index.
Comparing to the work done in [10, 11, 24, 3], in addition to the usual difficulties
due to high nonlinearity, solution multiplicity and instability in the problem, the
current numerical work has three major difficulties to overcome
(1) the Henon problem has only one trivial solution (a local minimum) u ≡ 0 with
MI(0) = 0. So it is always put in the support L of LMM. While the current
problem has two trivial solutions u0ε and u1ε . In particular, MI(u1ε ) changes as ε
varies. We have to estimate MI(u1ε ) for each ε in order to determine whether or not
a nontrivial positive solution exists and to decide if u1ε is needed to be put in the
support L of LMM for finding a new solution u∗ , because when MI(u1ε ) <MI(u∗ ),
u1ε is at u∗ ’s lower energy level and u1ε should be put in the support L; conversely
when MI(u1ε ) ≥MI(u∗ ), u1ε is at u∗ ’s upper or same energy level and u1ε should not
be put in the support L;
(2) as the singularly perturbed parameter ε decreases, there exist both boundary and
interior layers. So the peak(s) of a positive solution can be in the interior or on
the boundary of the domain. Such a situation causes difficulty in determining the
orthogonality of a function with existing solutions in the support L. In particular two positive functions satisfying zero Dirichlet/Neumann boundary condition
cannot be orthogonal. So the strict orthogonality condition in the mathematical
formulation of the original LMM actually prevents us from finding positive solutions with multi-peak or higher Morse index. Our model problem happens to be
such a case. Thus we have to relax the orthogonality requirement in selecting an
initial guess. Numerical computation shows that such a change is fine. However to
establish its scientific background, we need to modify the original formulation of
LMM and to analyze how this change will affect LMM in iterations. In particular
we need to find a weaker property to compensate the loss of the homeomorphism
property of a peak selection due to this change in proving the convergence of the
algorithm;
(3) as the singularly perturbed parameter ε becomes smaller, the peak of a positive
solution becomes sharper and more narrow. An evenly meshed finite element grid
lost its accuracy and may fail to catch the peak which may locate at many different
interior/boundary points. For the success of our numerical computation, certain
local refinement technique has to be developed.
The organization of the paper is as follows. In Section 2, we modify the definition
of a peak selection, prove some results that will be used as motivation/justification of
the modified LMM. A local refinement technique will also be added to LMM to solve
the singularly perturbed model problem numerically. After introducing the modified
LMM in this section, we then verify some important algorithm related properties.
Motivated by the numerical method and convinced by our numerical results, in Section
3, by using a Morse index approach which is different from that in [12, 14], we identify
the perturbation values that u1ε bifurcates to positive solutions, MI(u1ε ) for each εvalue and the critical perturbation value εc . We also verify that a sign-changing
4
XIE, YUAN and ZHOU
solution has MI ≥ 2 and a local minimum energy solution on the Nehari manifold is
non sign-changing. In Section 4, the last section, we display our numerical results.
To the best of our knowledge, such numerical solutions to the singularly perturbed
semilinear problem with Neumann boundary condition are computed and displayed
for the first time. Some of our numerical results are consistent with the theoretical
analysis in [2, 8, 9, 13, 15, 16]. Others are still open for theoretical verification.
Next we list some basic notions and properties for future development. Let H =
Hε (Ω) = H 1 (Ω) be the Hilbert space with the inner product and the norm
∫
∫
2
⟨u, v⟩ε = (ε∇u∇v + uv)dx and ∥u∥ε = (ε|∇u|2 + u2 )dx.
Ω
Ω
It is known that ∥ · ∥ε is an ε−dependent norm equivalent to the usual H 1 -norm given
by
∫
∥u∥2H 1 = (|∇u|2 + u2 )dx.
Ω
Definition 1.1. A functional J ∈ C 1 (H, R) is said to satisfy the Palais-Smale
(P.S.) condition, if any sequence {un } ∈ H with J(un ) bounded and J ′ (un ) → 0 has
a convergent subsequence. Following the lines as in [17] we can prove
Lemma 1.2. Iε ∈ C 2 (Hε , R) and satisfies P.S. condition, where C k (Hε , R) is the
space of all functions from Hε to R whose kth Frechet derivatives are continuous.
2. A modified LMM with local refinements. In this section, in order to
solve for multiple positive solutions to the singularly perturbed Neumann problem
(1.1), we modify the definition of the original LMM developed in [10, 11] by relaxing
a strict orthogonal condition and then study how this modification will affect LMM
in iterations and in convergence analysis. Such a modification actually improves the
mathematical foundation of the original LMM.
Let L ⊂ Hε (Ω) be a given closed subspace with its orthogonal complement L⊥ .
Denote SH = {v ∈ Hε (Ω) : ∥v∥ε = 1 } and [L, v] = {tv + w | w ∈ L, t ≥ 0}, v ∈ SH .
Definition 2.1. The (set-valued) peak mapping P : SH → 2H w.r.t. L is defined
by
P (v) := {v ∗ |v ∗ := arg max Iε (u)}, ∀v ∈ SH .
u∈[L,v]
A single-valued mapping p : SH → H is a peak selection of Iε w.r.t. L if
p(v) ∈ P (v), ∀ v ∈ SH .
For a given v ∈ SH , we say that Iε has a local peak selection w.r.t. L at v if there is
a neighborhood N (v) of v and a function p : N (v) ∩ SH → H s.t.
p(u) ∈ P (u)
∀ u ∈ N (v) ∩ SH .
Remark 2.1. Let v = v⊥ +vL ∈ SH for some v⊥ ∈ L⊥ , vL ∈ L. From the definition
we have
′
′
for some scalar tv and vector vL
∈ L.
(a) p(v) = tv v⊥ + vL
(b) v ∈ L ⇒ p(v) ∈ L or p(v) ∈
/L⇒v∈
/ L.
(c) Iε′ (p(v)) ⊥ [L, v] and Iε′ (p(v)) ⊥ p(v), ∀ v ∈ SH .
SOLVING SINGULARLY PERTURBED NEUMANN PROBLEMS
5
(d) The original domain of the peak mapping P in [10, 11] is SL⊥ not SH . Due to
this change, the strict orthogonal condition between the domain and the space
L containing previously found solutions is removed. Since two positive functions
satisfying zero Dirichlet or Neumann boundary condition cannot be orthogonal
each other, such modification allows us to theoretically find multiple positive
solutions by LMM, which improves the mathematical foundation of the original
LMM. Due to this change in the foundation, in principle all the proofs in [10, 11]
related to LMM have to be modified. They are not trivial. However due to page
limit, we have to skip those that can be routinely worked out by following the
lines of the proofs in [10, 11].
Lemma 2.2. For v0 ∈ SH , if there is a local peak selection p of Iε w.r.t. L at
v0 s.t. (a) p is locally Lipschitz continuous at v0 , (b) dist(p(v0 ), L) > α > 0 and (c)
∥∇Iε (p(v0 ))∥ε > δ > 0, then there is ε2 > 0, s.t.
Iε (p(v(s))) − Iε (p(v0 )) < −αδ∥v(s) − v0 ∥ε ,
∀ 0 < s < ε2
and
v(s) =
v0 + sw
,
∥v0 + sw∥ε
w = −∇Iε (p(v0 )).
Lemma 2.3. Let v ∗ ∈ SH and p be a local peak selection of Iε w.r.t. L at
v s.t. (a) p is locally Lipschitz continuous at v ∗ , (b) u∗ = p(v ∗ ) ∈
/ L and (c)
v ∗ = arg minv∈SH Iε (p(v)). Then u∗ is a critical point of Iε .
Under some conditions, [25] established the Morse index of a solution u∗ characterized in Lemma 2.3 as
∗
(2.1)
dim(L) + 1 = MI(u∗ ) + dim(H 0 ∩ [L, v ∗ ]).
If u∗ is nondegenerate, i.e., H 0 = {0}, then MI(u∗ ) = dim(L) + 1. So if MI(u∗ ) = n,
then L contains n − 1 solutions with smaller MI or at lower energy level. Define
M = {p(v) : v ∈ SH }.
Lemma 2.3 states that a minimum point u∗ of Iε on M is a critical point not in L, so
a new solution different from those in L. Note that u∗ is unstable in Hε but stable on
M. Then it leads to the following LMM, which is a stable algorithm for computing
unstable solutions.
Definition 2.4. A point v ∈ Hε is called a descent (ascent) direction of Iε at a
critical u0 , if there exists a δ > 0 such that
Iε (u0 + tv) < (>) Iε (u0 ) ∀ 0 < t < δ.
We are now ready to state a new LMM for finding multiple solutions to the singularly
perturbed Neumann problem (1.1).
A local minimax algorithm with local refinements
Step 1. Generate a mesh on Ω;
Step 2. Given δ1 > 0, λ > 0 and n − 1 previously found critical points w1 , ..., wn−1
of Iε . Set the support L = span{w1 , ..., wn−1 } where wn−1 is the one with the highest
0
0
+ vL
∈ SH at wn−1 with its
critical value. Choose an ascent direction v 0 = v⊥
0
0
⊥ 0
Laplacian ∆v where 0 ̸= v⊥ ∈ L , vL ∈ L. Set k0 = 50, t00 = 1, u0L = wn−1 and
k = 0;
6
XIE, YUAN and ZHOU
Step 3. Using the initial guess wk = tk0 v k + ukL , solve for
wk ≡ p(v k ) ≡ arg max
u∈[L,v k ]
Iε (u),
and still denote wk = p(v k ) = tk0 v k + ukL ;
Step 4. Compute the steepest descent vector dk of Iε at the point wk ;
Step 5. If ∥dk ∥ε ≤ δ1 , output wn = wk , stop; if ∥dk ∥ε > δ1 and k < k0 ,
goto Step 6; else, i.e., ∥dk ∥ε > δ1 and k > k0 , set wn0 = wk , goto Step 8;
Step 6. Set
v k (s) =
v k + sdk
∥v k + sdk ∥ε
and find
{ λ
}
λ
tk
λ
|2m > ∥dk ∥ε , Iε (p(v k ( m ))) − Iε (wk ) ≤ − 0 ∥dk ∥ε ∥v k ( m ) − v k ∥ε .
m
m∈N 2
2
2
2
sk = max
Initial guess u = tk0 v k ( 2λm ) + ukL is used to find the local maximum point p(v k ( 2λm ))
in [L, v k ( 2λm )] where tk0 and ukL are given in wk = tk0 v k + ukL ;
k+1
k+1
Step 7. Set v k+1 = v k (sk ) = v⊥
+ vL
, write wk+1 = p(v k+1 ) = tk+1
v k+1 + uk+1
0
L
and update k = k + 1, then goto Step 4 ;
Step 8. Identify subdomains where the peaks of wn0 are located and develop a
corresponding locally refined mesh with one or more levels, then goto Step 2.
Remark 2.2. It is clear that the above algorithm is a very sophisticated one, many
details need be addressed. So let us make some remarks on each step.
In Step 1: In our numerical code, a mesh is generated by using the Matlab
subroutines ”initmesh” and ”refinemesh”. If one roughly knows the peak location of
a target solution to be found, one may also add some local refinements accordingly.
The mesh is used with the finite element method in Step 4 to solve (2.2) for the
steepest descent vector dk .
In step 2: The scalar δ1 is used in Step 5 to control the error in a numerical
computation. Ideally wk is an exact solution if δ1 = 0. In this paper we set δ1 = 10−4 .
The scalar λ is an admissible maximum stepsize in terms of sk dk in Step 6. Since
all nontrivial positive solutions to (1.1) are unstable, if a stepsize in the direction dk
is too big, the algorithm may lose its stability. We set λ = 0.01 in this paper. The
support L is the subspace spanned by some previously found solutions. So the trivial
solution u0ε = 0 with MI= 0 is always in L. But we need to determine whether or not
we should put the trivial solution u1ε = 1 in L. The Morse index result (2.1) provides
a guideline for us to select previously found solutions and to put them in L. Roughly
speaking, to compute a target solution of MI=n, only n − 1 previously found solutions
at lower energy level (MI< n) can be selected and put in L. If MI(u1ε ) ≥ n, then u1ε
should not be put in L. So we need to know MI(u1ε ).
To select an ascent direction v 0 at wn−1 , when n = 1, any nonzero function is an
ascent direction; when n > 1, thanks to the removal of the strict orthogonal condition
from the original LMM, now we have much more flexibility than the original LMM.
Intuitively, to guarantee v 0 ∈ SH \ L is an ascent direction at wn−1 , we always select
v 0 so that there is a subdomain in Ω where v 0 has a peak but all solutions in L are
almost zero there. To improve the efficiency of the computation, v 0 should be selected
0
so that ∂v
∂n = 0 on ∂Ω.
SOLVING SINGULARLY PERTURBED NEUMANN PROBLEMS
7
In Step 3: Due to the even symmetry of the model problem, the maximization here is actually unconstrained in [L, v k ], or equivalently an unconstrained maximization over (tk0 , tk1 , ..., tkn−1 ), since v k , w1 , ..., wn−1 are fixed here and any point
in [L, v k ] can be written as tk0 v k + tk1 w1 + ... + tkn−1 wn−1 . So in our numerical
code, Matlab subroutines ”fminsearch”/”fminunc” are called with the initial guess
(1, 0, ..., 0, 1) to do the job. The solution to the maximization problem is then written
as wk = p(v k ) = tk0 v k + ukL for ukL ∈ L.
0
In Step 4: Since an ascent direction v 0 is always selected to satisfy ∂v
∂n = 0, it
k
0
k
∂v
∂w
leads to ∂w
∂n = 0. Eventually ∂n = 0 and ∂n = 0. By the definition of the Frechet
k
k
derivative, for w = p(v ) ∈ Hε (Ω), we have, for each v ∈ Hε ,
∫
d
′
k
k
Iε (w )v = |t=0 Iε (w + tv) = (−ε∆wk (x) + wk (x) − |wk (x)|p−1 wk (x))v(x)dx,
dt
Ω
i.e.,
Iε′ (wk ) = −ε∆wk (x) + wk (x) − |wk (x)|p−1 wk (x) ∈ W −1,2 (Ω).
So in general the smoothness of Iε′ (wk ) is ”poor” and can not be used as a search
direction in Hε (Ω). Thus we solve for its canonical dual dk = −∇Iε (wk ) ∈ Hε (Ω)
from the equation
{
ε∆dk − dk = Iε′ (wk ) = −ε△wk (x) + wk (x) − |wk (x)|p−1 wk (x) in Ω,
(2.2) ∂dk
on ∂Ω.
∂n = 0
Such dk is used in Step 4. One can prove that for each v k ∈ SH if wk = p(v k ) ∈ Hε (Ω)
is well-defined as in the algorithm, then (2.2) has a unique solution dk ∈ Hε (Ω) such
that
∫
k
′
k
k
′
k
d = 0 ⇔ Iε (w ) = 0 and ⟨d , v⟩ε = 0 ⇔ ⟨Iε (w ), v⟩W −1,2 ×W 1,2 =
Iε′ (wk )vdx = 0.
Ω
k
Thus finding the steepest direction d in Step 4 leads to solving a linear elliptic BVP
(2.2). This is where a discretization is used. The problem can be solved by many
existing numerical algorithms, such as a finite element method, a finite difference
method, or a finite boundary element method, etc. In our numerical code, Matlab
subroutine ”assempde”, a finite element method, is called.
In step 5: We use the norm ∥dk ∥ε < δ1 to control the error in our numerical
computation. Meanwhile we display the L2 -norm of Iε′ (wk ) and the maximum-norm
of the residual of the model equation to monitor the accuracy of our numerical computation. When ∥dk ∥ε > δ1 , it means either more iterations are required or the mesh
need be refined. Thus when ∥dk ∥ε > δ1 and k > k0 , a local refinement is carried out
in Step 8.
In step 6: The formula for v k (s) is designed to let the next point v k+1 stay in
the domain SH of a peak selection p, so the iteration can continue. An appropriate
stepsize sk is determined by the stepsize rule and is used to update the approximation
solution in Step 7. The stepsize rule in determining sk is very important for the
algorithm justification and convergence analysis. The result p(v k ( 2λm )) from the local
maximization method used in this step depends on the initial guess. There could be
multiple branches (peak selections). In order to have a continuous peak selection p,
one should consistently trace a branch. So it is important to follow the initial guess
given in this step.
8
XIE, YUAN and ZHOU
In step 8: According to our numerical experience on the model problem (1.1),
the local refinement technique is needed here only when ε is very small, say ε < 10−4 .
In this case the algorithm starts with a coarse mesh. When ε ≥ 10−4 , we may fix a
slightly dense mesh and solve the problem directly without using any local refinement.
Also the peak locations of wn0 can be easily determined here and a multi-level local
refinement mesh can be generated accordingly by using, e.g., the Matlab subroutine
”refinemesh”. The integer ℓ of the local refinement levels depends on the scale of
ε, since when ε is smaller, the solution peaks become sharper. We set ℓ to be the
smallest integer such that ε > 10−2ℓ . This process is very effective and usually need
be performed only once to have a sufficiently good mesh. Once a new mesh with local
refinement is generated, interpolation should be used for previously found solutions in
L to get data on the new grids in a subdomain where local refinement is performed.
Since the previously found solutions in L are almost zero in this subdomain, an usual
interpolation method should yield an accurate result.
If one roughly knows about the peak location of a target solution to be found,
one may also generate a corresponding mesh with one or multi-level local refinements
in Step 1 and then skip Step 8.
For easy selecting an initial guess, in this paper, we have used SH instead of SL⊥
to be the domain of a peak selection p. Consequently, p is, in general, no longer a
homeomorphism. In order to follow the lines of the proof of Theorem 3.1 in [11] to
prove the convergence result stated in Theorem 2.7 in the following, we first study
how this modification will affect iterations in the algorithm and then verify a new
property, a weaker version of the homeomorphism proved in Lemma 2.3 of [11].
Lemma 2.5. Let {v k } ⊂ SH be a sequence generated by the algorithm. Assume
0
0
0
0
0
0
v = v⊥
+ vL
∈ SH with v⊥
∈ L⊥ , vL
∈ L, v⊥
̸= 0. Then for any k = 1, 2, ..., we
k+1
k
k
k 0
k
⊥
k
have v = v⊥ + τ vL for some v⊥ ∈ L , 0 < τ k+1 < τ k < 1 and ∥v⊥
∥ε < ∥v⊥
∥ε .
k
k 0
Furthermore vL = τ vL converges.
k
k
k
k
Proof. Let v k = v⊥
+ vL
for some v⊥
∈ L⊥ , vL
∈ L. From the definition of a peak
k
k
k
selection p, we have d = −∇Iε (p(v ))⊥[L, v ]. Then Steps in the algorithm lead to
v k + sk dk
k+1
k+1
= v⊥
+ vL
v k+1 = √
1 + |sk |2 ∥dk ∥2ε
where
v k + sk dk
k+1
v⊥
=√ ⊥
∈ L⊥
1 + |sk |2 ∥dk ∥2ε
and
k
vL
k+1
vL
=√
∈ L.
1 + |sk |2 ∥dk ∥2ε
Thus
k+1
vL
=
k
∏
1
√
v0 .
i |2 ∥di ∥2 L
1
+
|s
ε
i=0
Set
τ k+1 =
k
∏
i=0
√
1
1 + |si |2 ∥di ∥2ε
.
Then {τ k } is positive, monotone decreasing in k and bounded by 1. Therefore v k =
0
k
0
converges. On the other hand,
v⊥
+ τ k vL
and τ k vL
k 2
0 2
1 = ∥v k ∥2ε = ∥v⊥
∥ε + ∥τ k vL
∥ε .
9
SOLVING SINGULARLY PERTURBED NEUMANN PROBLEMS
k 2
When {τ k } is positive, monotone decreasing in k, ∥v⊥
∥ε is monotone increasing in k.
Thus the lemma is proved.
It is interesting to note that we have three monotone properties in the algorithm
k
k
for all v k = v⊥
+ vL
, k = 1, 2, ..., namely,
Iε (p(v k+1 )) < Iε (p(v k )),
k+1
k
∥v⊥
∥ε > ∥v⊥
∥ε ,
k+1
k
∥vL
∥ε < ∥vL
∥ε .
0
0
Lemma 2.5 also implies that once an initial guess v 0 = v⊥
+ vL
is used in the
⊥ 0
algorithm with v⊥ ∈ L , vL ∈ L, we can focus our attention of the domain of a
peak selection p only on a subset S[L⊥ ,vL0 ] which contains all possible vectors that our
algorithm may generate. But we still cannot assume p is continuous on S[L⊥ ,vL0 ] . To
√
√
⊥
0
0
see this, let us denote v(t) = tv⊥ + 1−t
h vL where v⊥ ∈ L , ∥v⊥ ∥ε = 1 > ∥vL ∥ε =
h > 0, 0 < t < 1. Then v(t) ∈ S[L⊥ ,vL0 ] , v(t) →
0
vL
h
and
0
],
[L, v(t)] = [L, v⊥ ] ̸= [L] = [L, vL
i.e., there is a jump discontinuity in the domain of maximization as t → 0, so we
cannot expect
p(v(t)) = arg
1 0
J(u) = arg max J(u) → arg max J(u) = p( vL
).
u∈L
h
u∈[L,v(t)]
u∈[L,v⊥ ]
max
0
To remove the jump discontinuity, by Lemma 2.5, we may assume ∥vL
∥ε ≤
denote
3
4
and
0
U = {u = u⊥ + τ vL
∈ S[L⊥ ,vL0 ] : u⊥ ∈ L⊥ , 0 ≤ τ ≤ 1}.
Then the closed subset U contains all vectors v k generated by the algorithm and we
may assume p is continuous in U .
Theorem 2.6. Let {v k } ⊂ SH be a sequence generated by the algorithm as in
Steps 7 and 8. Assume (a) p is continuous in U and (b) dist(p(v k ), L) ≥ α > 0.
Then p(v k ) → p∗ ∈ H implies that there exists v ∗ ∈ SH such that v k → v ∗ ∈
/ L and
p(v ∗ ) = p∗ ∈
/ L.
k
0
0
∗
Proof. Let v⊥
, τ k , vL
be as in Lemma 2.5. Denote τ k vL
→ vL
∈ L and
k
0
p(v k ) = tk v k + ukL = tk (v⊥
+ τ k vL
) + ukL → p∗ = u∗⊥ + u∗L
for some tk > 0, ukL , u∗L ∈ L and u∗⊥ ∈ L⊥ . Thus u∗⊥ ̸= 0 by condition (b). Then the
projection to L⊥ satisfies
k
PL⊥ (p(v k )) = tk v⊥
→ u∗⊥ .
0
0
0 2
0 2
0
0
By v 0 = v⊥
+ vL
, 1 = ∥v 0 ∥2ε = ∥v⊥
∥ε + ∥vL
∥ε and v⊥
̸= 0, we have ∥vL
∥ε < 1. Since
k 2
0 2
1 = ∥v k ∥2ε = ∥v⊥
∥ε + ∥τ k vL
∥ε , 0 < τ k+1 < τ k < 1,
we obtain
0
0
∥τ k vL
∥ε ≤ ∥vL
∥ε < 1
and
k 2
0 2
∥v⊥
∥ε ≥ 1 − ∥vL
∥ε > 0.
0
k
Thus convergence of ∥τ k vL
∥ε implies that ∥v⊥
∥ε converges to a positive number. Then
∗
∗
k
k
= a10 u∗⊥ ∈
→ v⊥
from tk v⊥ → u⊥ ̸= 0, we obtain that tk → a0 > 0. Consequently v⊥
⊥
∗
L with v⊥ ̸= 0. Therefore
k
0
∗
∗
v k = v⊥
+ τ k vL
→ v ∗ = v⊥
+ vL
∈
/ L.
10
XIE, YUAN and ZHOU
By conditions (a) and (b), p(v k ) → p(v ∗ ) = p∗ ∈
/ L.
Using the property verified in Theorem 2.6 to replace the homeomorphism condition and then follow the lines of the original proof in [11, 26], we obtain
Theorem 2.7. Let p be a peak selection of Iε w.r.t. L, {wk } is the sequence
generated by the algorithm with δ1 = 0 s.t. wk = p(v k ) and Iε satisfy the P.S condition. If (a) p is continuous in U , (b) dist(L, wk ) > α > 0, ∀ k = 0, 1, 2, ..., and
(c) infv∈SH Iε (p(v)) > −∞, then v k → v ∗ ∈ SH \ L and wk = p(v k ) → p(v ∗ ) with
Iε′ (p(v ∗ )) = 0 and p(v ∗ ) ∈
/ L.
Lemma 2.8. If L = {0}, then the peak selection p is uniquely defined and differentiable with Iε (p(v)) > C0 > 0 and dist(p(v), L) > C1 > 0 for all v ∈ SH .
Proof. Let v ∈ SH , we have
∫
∫
∫
tp+1
t2
tp+1
t2
(ε|∇v|2 + v 2 )dx −
|v|p+1 dx =
|v|p+1 dx.
−
Iε (tv) =
2 Ω
p+1 Ω
2
p+1 Ω
Solving tv > 0 from
dIε (tv)
= t − tp
dt
∫
|v|p+1 dx = 0,
Ω
we obtain
1
) p−1
1
> 0.
p+1
|v| dx
Ω
(
tv = ∫
(2.3)
Plugging such tv into Iε (tv v), we obtain
∫
2
) 1−p
1
1 (
Iε (tv v) = ( −
> 0.
)
|v|p+1 dx
2 p+1
Ω
By the embedding theorem, we have
tv ≥ C1 > 0,
(2.4)
Iε (tv v) ≥ C0 > 0,
where ∥v∥ε = 1 is used. As a result, the peak selection p of Iε w.r.t. L = {0} is
1
] p−1
1
v.
|v|p+1 dx
Ω
[
p(v) = tv v = ∫
Clearly
dist(p(v), L) = ∥p(v) − 0∥ε = tv ≥ C1 > 0.
Next we prove p is differentiable. Denote G : SH × R+ → R by
∫
G(v, t) = t − tp
|v|p+1 dx.
Ω
Then we have G(v, tv ) ≡ 0 for any v ∈ SH and tv > 0 given by (2.3). We obtain
∫
∂G
p−1
|v|p+1 dx.
= 1 − pt
∂t
Ω
Since tv ̸= 0, we have
∂G
∂G
1
(v, tv ) =
(v, tv ) − G(v, tv ) = (1 − p)tvp−1
∂t
∂t
tv
∫
|v|p+1 dx ̸= 0.
Ω
SOLVING SINGULARLY PERTURBED NEUMANN PROBLEMS
11
The implicit function theorem states that the solution t(v) = tv to the equation
G(v, t(v)) = 0 exists uniquely in a neighborhood of each v and is C 1 in v.
Define the Nehari manifold
N = {tv v : v ∈ SH }.
We have proved that N is differentiable with dist(N , 0) > C1 > 0 and min Iε (u) > 0.
u∈N
It is clear that each nonzero critical point is on N , a local minimum of Iε on N is a
solution with MI ≤ 1 and M ⊂ N . Since the conditions in Theorem 2.7 are verified,
we obtain
Theorem 2.9. Let p be a peak selection of Iε w.r.t L = {0}, {wk } be the sequence
generated by the algorithm with δ1 = 0, wk = p(v k ), then v k → v ∗ ∈ SH and wk =
p(v k ) → p(v ∗ ) with Iε′ (p(v ∗ )) = 0 and p(v ∗ ) ̸= 0.
3. On Bifurcation Points, MI(u1ε ) and Critical Perturbation Value. In
this section, motivated by our algorithm and convinced by the numerical results,
see Figs. 4.2 and 4.3, we verify MI(u1ε ), the bifurcation points at u1ε and the critical
perturbation value εc for (1.1) which will help us in determining the existence of
nontrivial positive solutions and if we need to put u1ε in the support L.
Let 0 = λ1 < λ2 ≤ λ3 ≤ · · · be all the eigenvalues and u1 = √1 , u2 , u3 , · · · be
|Ω|
all the corresponding orthonormal eigenfunctions to the eigen-problem
(3.1)
−△u(x) = λu(x) x ∈ Ω and
∂u(x)
= 0 x ∈ ∂Ω.
∂n
Then {u1 , u2 , u3 , ...} forms a complete basis for H 1 (Ω) [18]. Denote p−1
λ1 = +∞. We
also have ⟨ui , v⟩ε = (ελi + 1)⟨ui , v⟩L2 , ∀v ∈ H 1 (Ω). For all u, v, w ∈ H 1 (Ω), we have
∫
∫
1
1
2
2
Iε (u) =
(ε|∇u| + u )dx −
|u|p+1 dx,
2 Ω
p+1 Ω
∫
)
(
′
⟨Iε (u), v⟩ =
ε∇u · ∇v + uv − |u|p−1 uv dx,
∫Ω [
]
′′
ε∇w · ∇v + wv − p|u|p−1 wv dx.
(3.2)
⟨Iε (u)w, v⟩ =
Ω
Take u = 0, w = v = ui , we obtain
∫
⟨Iε′′ (0)ui , ui ⟩ = (ελi + 1)u2i (x)dx > 0 ∀ i = 1, 2, ....
Ω
u0ε
So
= 0 cannot bifurcate to any solution. On the other hand, note that by the
maximum principle, an one-sign solution either whose value and derivative are equal
to zero at an interior point of Ω or whose value and normal derivative are equal to
zero at a boundary point of Ω must be identically equal to zero. Since sign-changing
solutions have nodal lines (where values are equal to zero) inside Ω, when a sequence of
sign-changing solutions approach to an one-sign solution u0 , there are two possibilities:
(1) some nodal lines stay inside Ω thus u0 attains its zero value and zero derivative at
an interior point of Ω or (2) some nodal lines approach to the boundary ∂Ω thus u0
attains its zero value and zero normal derivative (as a solution) at a boundary point
of Ω. In either case, u0 has to be identically equal to zero. Under such situation, as
positive solutions are concerned, we only need to consider bifurcations from u1ε along
the perturbation parameter ε. Our main theorem reads
Theorem 3.1. For k = 1, 2, 3, ...,
12
(a) if
XIE, YUAN and ZHOU
p−1
p−1
1
1
λk+1 < ε < λk , then uε is nondegenerate with MI (uε ) = k;
p−1
p−1
p−1
p−1
1
λk > ε = λk+1 = · · · = λk+rk > λk+rk +1 , then uε is degenerate
(b) if
with MI (u1ε ) =
k and nullity = rk ≥ 1;
1
(c) ε = p−1
εc = p−1
λk is a bifurcation point for uε . Consequently
λ2 .
1
1
Proof. We consider only the uε branch. Take u = uε , w = ui , i = 1, 2, 3, ... and
any v ∈ H 1 (Ω), (3.2) leads to
∫ [
∫
]
⟨Iε′′ (u1ε )ui , v⟩ =
ε∇ui · ∇v + ui v − pui v dx = (ελi + 1 − p)ui vdx
Ω
Ω
∫
∫
ελi + 1 − p
=
(ελi ui v + ui v)dx = µεi (ε∇ui · ∇v + ui v)dx
ελi + 1
Ω
Ω
(3.3)
= µεi ⟨ui , v⟩ε
where
µεi =
ελi + 1 − p
p
=1−
.
ελi + 1
ελi + 1
Thus
Iε′′ (u1ε )ui = µεi ui , i = 1, 2, · · · .
In other words, for all ε > 0, ui , i = 1, 2, ... are also orthogonal eigenfunctions of the
linear operator Iε′′ (u1ε ) corresponding respectively to the eigenvalues µεi . Also it is
clear that the multiplicity of µεi is equal to the multiplicity of λi . Since {u1 , u2 , u3 , ...}
forms a complete basis for H 1 (Ω), ui , i = 1, 2, · · ·, must be all the orthonormal eigenfunctions of Iε′′ (u1ε ). Thus when λp−1
< ε < p−1
λk , we have
k+1
µεi < 0, ∀i = 1, 2, · · · , k
and µεj > 0, ∀j = k + 1, k + 2, · · · ,
i.e., Iε′′ (u1ε ) has a spectrum decomposition
H 1 (Ω) = H − ⊕ H 0 ⊕ H + where H − = [u1 , ..., uk ], H 0 = {0}, H + = [uk+1 , uk+2 , ...]
are respectively the maximum negative, null and positive orthogonal subspaces of
Iε′′ (u1ε ) in H 1 (Ω). Thus u1ε is a nondegenerate critical point with MI(u1ε ) = k. This
proves (a).
Since the multiplicity of µk is equal to that of λk , ∀k = 1, 2, ..., from the above
analysis, denote the spectrum decomposition of I ′′ (u1ε ) by H 1 (Ω) = H − ⊕ H 0 ⊕ H +
as before.
p−1
p−1
p−1
When p−1
λk > ε = λk+1 = · · · = λk+r > λk+r +1 , then we have
k
k
µi < 0, i = 1, 2, ..., k, µi = 0, i = k + 1, ..., k + rk , µi > 0, i = k + rk + 1, k + rk + 2, · · · .
Thus
H − = [u1 , ..., uk ], H 0 = [uk+1 , ..., uk+rk ], H + = [uk+rk +1 , uk+rk +2 , ...].
So u1ε is degenerate with MI (u1ε ) = k and nullity = rk ≥ 1. This proves (b).
1
Since every time ε decreases cross the number p−1
λk , MI(uε ) increases by r ≥ 1
p−1
where r is the multiplicity of λk , by [5], ε = λk is a bifurcation point for u1ε . In
particular, it is known that λ1 = 0 is a simple eigenvalue and when ε is sufficiently
SOLVING SINGULARLY PERTURBED NEUMANN PROBLEMS
13
p−1
large, u1ε is the only positive critical point [13]. Since when +∞ = p−1
λ1 > ε > λ2 ,
u1ε is always nondegenerate, it cannot have a bifurcation and u1ε is the only positive
critical point of Iε in its branch. Consequently εc = p−1
λ2 .
Remark 3.1. In Theorem 3.1, we have identified MI(u1ε ), all ε-values where u1ε
bifurcates to nontrivial positive solutions, and verified the critical perturbation value
εc . With the Morse index result (2.1), if the Morse index of a target solution is
less than or equal to MI(u1ε ), we conclude that u1ε should not be put in L. Note
that results on a least energy solution cannot be used here since our LMM is a local
method, we can only compute a local minimum of Iε on N , i.e., L = {0}. Motivated
by our numerical results, in the following Theorem 3.3 we prove that in this case the
solution found must be a non-constant positive solution. Thus all positive solutions
are directly/indirectly generated by bifurcations from u1ε as ε decreases cross each
p−1
1
1
λk and MI (uε ) increases accordingly following Theorem 3.1. Consequently MI (uε )
is always larger than that of other positive solutions. So when we compute a positive
solution, we should not put u1ε in L. This is also confirmed by our numerical results.
Lemma 3.2. Let u∗ be a critical point of a C 2 functional I from a Hilbert space
H to R. If there are vectors u1 , ..., uk ∈ H s.t.
{
< 0 if i = j,
⟨I ′′ (u∗ )ui , uj ⟩
= 0 if i ̸= j.
then MI (u∗ ) ≥ k.
Proof. Let H = H − ⊕ H 0 ⊕ H + be the spectrum decomposition of the linear
operator I ′′ (u∗ ) where H − , H 0 , H + are respectively the maximum negative definite,
null and positive definite subspaces of I ′′ (u∗ ) in H with dim(H 0 ) < +∞. We need
to show that dim(H − ) ≥ k. Suppose not, then we have H − = [v1− , ..., vl− ] for some
+
0
vectors v1− , ..., vl− ∈ H and l < k. Let ui = u−
i + ui + ui , i = 1, ..., k for some
+
−
+
0
−
0
ui ∈ H , ui ∈ H and ui ∈ H . Since
0=
k
∑
ci ui ⇒ 0 =
i=1
k
∑
ci ⟨I ′′ (u∗ )ui , uj ⟩ = cj ⟨I ′′ (u∗ )uj , uj ⟩ ⇒ cj = 0, j = 1, 2, ..., k
i=1
and l < k, there are numbers ci , i = 1, ..., k s.t.
k
∑
ci u−
i = 0,
u0 =
i=1
It follows that u0 =
k
∑
i=1
k
∑
ci ui ̸= 0.
i=1
0
0
+
ci (u+
i + ui ) ∈ H ⊕ H . Thus
⟨I ′′ (u∗ )u0 , u0 ⟩ ≥ 0.
On the other hand,
⟨I ′′ (u∗ )u0 , u0 ⟩ = ⟨I ′′ (u∗ )
k
∑
i=1
ci ui ,
k
∑
j=1
cj uj ⟩ =
k
∑
c2i ⟨I ′′ (u∗ )ui , ui ⟩ < 0.
i=1
It leads to a contradiction. Therefore we must have l = dim(H − ) ≥ k.
Theorem 3.3. Any sign-changing solution has MI ≥ 2 and a local minimum of
Iε on N must be a non-sign-changing solution to (1.1).
14
XIE, YUAN and ZHOU
Proof. It is known that a local minimum of Iε on N , if it exists, is a solution to
(1.1) with MI≤ 1. On the other hand, we have proved that N is differentiable, closed
and Iε is non negative on N . So a local minimum of Iε on N always exists. Therefore
we only have to show that a sign-changing solution has MI ≥ 2, thus cannot be a local
minimum of Iε on N .
If v = v + + v − is a sign-changing solution to (1.1), where v + (x) = max{v(x), 0}
and v − = min{v(x), 0} with v + ̸= 0 and v − ̸= 0, then v + (x)v − (x) = 0 ∀x ∈ Ω and
for any u ∈ Hε , it holds
∫ (
)
Iε′ (v)u =
ε∇v · ∇u + vu − |v|p−1 vu dx = 0.
Ω
In particular when u = v + or u = v − , we have
∫ (
)
0=
ε∇v · ∇v + + vv + − |v|p−1 vv + dx
∫Ω (
)
=
ε|∇v + |2 + |v + |2 − |v + |p+1 dx = Iε′ (v + )v +
∫Ω (
)
0=
ε∇v · ∇v − + vv − − |v|p−1 vv − dx
∫Ω (
)
=
ε|∇v − |2 + |v − |2 − |v − |p+1 dx = Iε′ (v − )v − .
Ω
Since v + ̸= 0 and v − ̸= 0, v + , v − ∈ N . Consider v(t) = v + + tv − , t > 0. We have
Iε (v(t)) = Iε (v + ) + Iε (tv − ).
Thus
d
d
Iε (v(t)) = Iε (tv − )
dt
dt
and
d2
d2
Iε (v(t)) = 2 Iε (tv − ).
2
dt
dt
Then by the definition of N and (3.2), we have
∫ [
]
d ε|∇v − |2 + |v − |2 − |v − |p+1 dx,
Iε (v(t)) = Iε′ (v − )v − = 0 =
dt t=1
Ω
d2 Iε (v(t)) = ⟨Iε′′ (v)v − , v − ⟩ = ⟨Iε′′ (v − )v − , v − ⟩
dt2 t=1
∫ [
]
=
ε|∇v − |2 + |v − |2 − p|v − |p+1 dx < Iε′ (v − )v − = 0,
Ω
or ⟨Iε′′ (v)v − , v − ⟩ < 0. Similarly by considering v(t) = tv + + v − , we obtain the
inequality ⟨I ′′ (v)v + , v + ⟩ < 0. Since v + ̸= 0, v − ̸= 0, from (3.2) we have
∫ [
]
ε∇v + · ∇v − + v + v − − p|v|p−1 v + v − dx = 0.
⟨Iε′′ (v)v + , v − ⟩ =
Ω
By applying Lemma 3.2, we conclude MI (v) ≥ 2. Therefore if v is a local minimum
of Iε on N , it has MI (v) ≤ 1. Thus v must be non-sign-changing.
SOLVING SINGULARLY PERTURBED NEUMANN PROBLEMS
15
4. Computational examples. In this section, we apply our modified LMM
developed in the previous sections to solve for multiple positive solutions to the problem (1.1) with p = 3 and Ω = (0, 1)2 ., i.e.,
ε△u − u + u3 = 0 in Ω = (0, 1) × (0, 1),
u>0
in Ω,
(4.1)
∂u
=
0
on ∂Ω.
∂n
So our previously conjectured (later on proved) critical perturbation value of ε is
p−1
1
1
< εc =
≈ 0.2026 < .
2
5
π
4
Single-peak solutions. We first take the eigenfunction u0 (x1 , x2 ) = cos (πx1 ) ·
cos (πx2 ) of the eigen-problem (3.1) as an initial ascent direction v 0 and reduce ε
gradually to observe the change of the single-peak numerical solutions. We find that
eq. (4.1) has only the trivial solution u1ε = 1 when ε > εc . When ε < εc , the
least-energy numerical solutions with the unique peak at a corner of ∂Ω are obtained.
Figs. 2-6 reflect the impact of the change of ε on the least energy solutions, where
the local refinement strategy is implemented when ε is small enough. Our numerical
results are in accordance with the conclusion of Theorem 3.1.
Then we take v 0 = u0 (x1 , x2 ) = sin (πx1 ) sin (πx2 ). Interior single-peak solutions
are obtained by our modified LMM when ε is sufficiently small. But when ε is not
sufficiently small, say ε = 10−2 , our algorithm failed to get any single-peak solution as
the norm of the gradient did not decrease in iterations even for more refined meshes.
The figures of the interior single-peak solutions varying with ε are shown in Figs. 9-11.
It is noted that the energy of an interior single-peak solution is always larger than
that of the least-energy solution for the same ε.
Multi-peak solutions. In order to compute multi-peak solutions, we take the following function as an initial ascent direction, i.e.,
vx0i (x) = cos(
|x − xi | π
) if |x − xi | ≤ di
di
2
and vx0i (x) = 0 otherwise.
where xi ∈ Ω. This type of initial ascent directions satisfies the boundary condition
∂v 0
∂n = 0 and can control the peak-locations of solutions conveniently. By carefully
choosing the location of xi , we can get multi-boundary/interior-peak solutions when
ε is sufficiently small. Actually when we compute multi-boundary-peak solutions, we
always select a point xi ∈ ∂Ω, which attains a local extreme of the mean curvature
on ∂Ω. When we compute multi-interior-peak solutions with k peaks, we select k
points xi = P i ∈ Ω, i = 1, ..., k, at which φk (P 1 , ..., P k ) (as defined in Section 1)
attains a local maximum value. di is the radius of a ball in Ω where vx0i (x) is nonzero.
di should not be selected too small since a smooth initial ascent direction is much
more appropriate in the computation. In our computation, we always set di = 0.5.
Generally speaking, by choosing different xi and di , we will select a new initial ascent
direction vx0i accordingly. Then with the help of the support L, we can compute a new
solution with multi-peaks. Figs. 15-20 show the solutions with exactly k boundary
peaks located at the points where the mean curvature attains the minimum value.
Therefore these figures are consistent with the theoretical results of [2, 9]. Figs. 7-8
are the solutions with k peaks (k = 1, 2, 3, 4) at the corners where the mean curvature
attains the maximum value. Figs. 12-14 are the solutions with k interior peaks with
16
XIE, YUAN and ZHOU
k = 1, 2, 3, 4. When k = 2, the solution corresponding to Fig. 13(left) is in accordance
with the result in [8]. However, when k = 1, 3, 4, to the best of our knowledge, there
are no theoretical results available in the literature on the locations of the interior
peaks for the solutions in Figs. 12, 13(right) and 14. Figs. 21-24 show the appearance
of solutions with M I ≥ 2 when ε decreases gradually. We note that each solution on
the left of Figs. 21-24 is a positive least-energy solution with M I = 1 and is put in the
support L to capture the corresponding positive or sign-change solution with M I ≥ 2
on the right of the same figures. It is observed that, when ε > 19 , the nontrivial
solutions with M I = 2 can only be the sign-changing ones. For simplicity, we just
show the figures of the sign-changing solutions with M I = 2 when ε = 15 , 19 in Figs. 2122, respectively. However, the nontrivial positive solutions with M I > 2 appear when
1
, as shown in Figs. 23-24. An interesting phenomenon in Fig. 23(right) shows
ε ≤ 12
1
that the peak of a positive solution locates along a line as ε = 12
. In Remark 3.1, we
point out that all positive solutions are generated by bifurcations from u1ε = 1 as ε
decreases cross each p−1
λk .
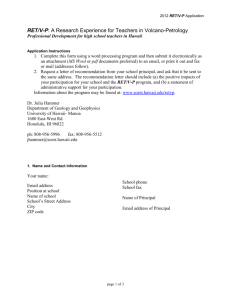
Remark 5.1. (a) Due to the existence of interior or boundary layers, the efficiency of the computation depends strongly on the quality of the mesh. In this
paper, we combine a symmetrically triangular mesh and a local refinement strategy
to produce a computational mesh, e.g., as shown in Fig. 4.1.
A symmetrical triangle mesh with local refinement strategy being used.
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
Fig. 4.1. One of the 4-level locally refined mesh-grid of Ω.
(b) Among all the numerical solutions obtained in this paper, the analysis on
the existence and location of the least-energy solutions, multi-boundary-peak solutions, interior single-peak solutions corresponding to Figs. 9-11 and interior two-peak
solution corresponding to Fig. 13(left) have been studied in [15, 16], [9, 7] and [8],
respectively. However, the locations of the peaks for the interior single-peak solutions
in Figs. 12 and the three or four interior-peak solutions shown in our numerical examples have not yet been verified.
(c) Since the model problem is singularly perturbed, it is difficult to observe the
figures of the numerical solutions clearly around their peaks when ε is very small. So
to have a better view about the peaks, we present their near the peak zoom-in mesh
profiles when ε is very small, e.g., ε = 10−7 , 10−8 . Meanwhile, in order to plot the
contours and mesh profile of a solution together, a vertical translation of the solution
has been used (e.g., Figs. 21(right) and 22(right) are actually sign-change solutions)
except those in Figs. 2-3, 5(left), 6(left), 10(left) and 11(left) where the true peak
height of each solution is listed as umax .
17
SOLVING SINGULARLY PERTURBED NEUMANN PROBLEMS
ε=0.205, g−norm=4.69e−006, error=0.0015, max(abs(res))=0.0210,
energy=0.2500, u−max=1.0041 at ( 0.9915, 0.9987 ).
ε=1/4 mesh=23102, g−norm=1.24e−007, error=2.76e−005,
max(abs(res))=5.42e−005, energy=0.2500, u−max=1.0001
1.5
1.5
1
1
0.5
0.5
0
1
0
1
0.8
0.6
0.4
0.2
0
0.4
0.2
0
0.8
0.6
1
0.5
0
0.2
0
0.8
0.6
0.4
1
Fig. 4.2. The trivial solution u = 1 with ε = 1/4 (left) and ε = 0.205 (right).
ε=1/5 mesh=23102, g−norm=4.59e−006, error=4.77e−005,
max(abs(res))=1.04e−004, energy=0.2475, u−max=1.7157
ε=1/6 mesh=23102, g−norm=2.31e−006, error=4.41e−005,
max(abs(res))=8.06e−005, energy=0.2228, u−max=1.9960
2
2
1.5
1.5
1
1
0.5
0.5
0
0
1
0.2
0.4
0.5
0.6
0.8
1
1
0
0
0.5
0.2
0
0.4
0.6
0.8
1
0
Fig. 4.3. The first nontrivial least-energy solution as ε decreases, ε = 1/5 (left) and a leastenergy solution with ε = 1/6 (right).
ε=10−3, mesh=23102, g−norm=3.39e−007, error=8.19e−007,
max(abs(res))=3.13e−005, energy=0.0015, u−max=2.2270
0
ε=10−4,mesh=45434,g−norm=2.20e−008,error=1.34e−007,
max(abs(res))=1.97e−006,energy=1.4647e−004,u−max=2.2078
0
−1
−1
−2
−2
−3
−3
−4
1
−4
1
0.8
0.6
0.5
0.4
0
0
0.2
0.4
0.6
0.8
1
0.2
0
0
0.2
0.4
0.6
0.8
Fig. 4.4. Two least-energy solutions with ε = 10−3 (left) and ε = 10−4 (right).
1
18
XIE, YUAN and ZHOU
−7
ε=10 ,mesh=45434,g−norm=7.14e−011,error=1.31e−008,
max(abs(res))=1.21e−006,energy=1.8688e−007,u−max=1.7198
0
−1
−2
−3
−4
1
0.995
0.99
0.985
0.98
0.98
0.995
0.99
0.985
1
Fig. 4.5. A least-energy solution with ε = 10−7 (left) and its near the peak zoom-in mesh-profile
(right).
ε=10−8, mesh=47290, g−norm=6.90e−011, error=9.59e−009,
max(abs(res))=7.08e−007, energy=2.36e−008, u−max=1.5277
0
−1
−2
−3
−4
1
0.995
0.99
0.992
0.99
0.994
0.996
0.998
1
Fig. 4.6. A least-energy solution with ε = 10−8 (left) and its near the peak zoom-in mesh-profile
(right).
ε=10−4,mesh=5557,g−norm=7.54e−008,error=9.55e−007,max(abs(res))=3.38e−005,
energy=3.7068e−004,u−max=2.1781.The local maximum points are (1,1) and (0,0).
ε=10−4, mesh=5557, g−norm=3.56e−007, error=7.84e−006, max(abs(res))=0.0002,
energy=1.5078e−004, the local maximum point is (0.9990, 0.9997).
0
0
−1
−1
−2
−2
−3
−3
−4
1
−4
1
0.5
0
0
0.2
0.4
0.6
0.8
1
0.5
0
0
0.2
0.4
0.6
0.8
1
0
Fig. 4.7. A boundary-corner single-peak solution u1c with L = [0], v 0 (x) = v(1,1)
(x), ε = 10−4
0
(left) and a boundary-corner 2-peak solution u2c with L = [u1c ], v 0 (x) = v(0,0)
(x), ε = 10−4 (right).
19
SOLVING SINGULARLY PERTURBED NEUMANN PROBLEMS
ε=10−4,mesh=5557,g−norm=3.01e−006,error=5.82e−005,max(abs(res))=0.0018,
energy=5.3898e−004,u−max=2.1781.The local maximum points are (1,1), (0,0)
and (1,0).
ε=10−4,mesh=5557,g−norm=1.23e−005,error=1.39e−004,max(abs(res))=0.0029,
energy=7.5888e−004,u−max=2.1784.The local maximum points are (1,1), (0,0)
(1,0) and (0,1).
0
−0.5
0
−1
−1
−1.5
−2
−2
−2.5
−3
−3
−4
1
−3.5
1
0.8
0.6
0.5
0
0.6
0.4
0.2
0
0.8
0.4
1
0.2
0
0.2
0
1
0.8
0.6
0.4
0
Fig. 4.8. A boundary-corner 3-peak solution u3c with L = [u1c , u2c ], v 0 (x) = v(1,0)
(x), ε = 10−4
0
(left) and a boundary-corner 4-peak solution u4c with L = [u1c , u2c , u3c ], v 0 (x) = v(0,1)
(x), ε = 10−4
(right).
ε=10−5,mesh=4312,g−norm=1.88e−007,error=5.37e−006,
max(abs(res))=7.55e−005,energy=7.8690e−005,u−max=1.6665
−4
ε=10 ,mesh=87672,g−norm=1.22e−006,error=4.78e−005,
max(abs(res))=0.0010,energy=5.8586e−004,u−max=2.2029
0
0
−1
−1
−2
−2
−3
−3
−4
1
−4
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
0.5
0
Fig. 4.9. An interior single-peak solution with ε =
solution with ε = 10−5 (right).
10−4
0.2
0
0.4
0.6
0.8
1
(left) and an interior single-peak
ε=10−7, mesh=246240, g−norm=3.28e−012, error=7.02e−010,
max(abs(res))=6.59e−009, energy=5.8819e−007, u−max=2.1906
0
−1
−2
−3
−4
0.501
0.5005
0.501
0.5005
0.5
0.5
0.4995
0.499
Fig. 4.10. An interior single-peak solution with ε =
mesh-profile (right).
10−7
0.4995
0.499
(left) and its near the peak zoom-in
20
XIE, YUAN and ZHOU
−8
ε=10 , mesh=246240, g−norm=5.88e−013, error=1.39e−010,
max(abs(res))=6.54e−009, energy=6.1467e−008, u−max=2.0560
0
−1
−2
−3
−4
0.501
0.5005
0.501
0.5005
0.5
0.5
0.4995
0.499
0.4995
0.499
Fig. 4.11. An interior single-peak solution with ε = 10−8 (left) and its near the peak zoom-in
mesh-profile (right).
ε=10−5, mesh=4848, g−norm=1.62e−007, error=7.33e−006, max(abs(res))=1.17e−004,
energy=6.5692e−005, u−max=1.9658, the local maximum point is (0.4997, 0.2510).
ε=10−5, mesh=4480, g−norm=7.75e−007, eror=4.95e−006, max(abs(res))=6.75e−005,
energy=1.2609e−004, the local maximum point is (0.2513, 0.2539).
0
0
−1
−1
−2
−2
−3
−3
−4
1
−4
1
0.5
0
0
0.2
0.4
0.6
0.8
1
0.5
0
0.4
0.2
0
0.6
0.8
1
0
(x), ε = 10−5
Fig. 4.12. An interior single-peak solution u1i1 with L = [0], v 0 (x) = v(0.5,0.25)
0
(x), ε = 10−5 (right).
(left) and an interior single-peak solution u1i2 with L = [0], v 0 (x) = v(0.25,0.25)
ε=10−5,mesh=4848,g−norm=1.50e−007,error=4.51e−006,max(abs(res))=1.09e−004,
energy=1.4272e−004,u−max=1.9659. The local maxmum points are (0.5,0.25) and
(0.5,0.75).
ε=10−5, mesh=4480, g−norm=6.25e−006, eror=4.75e−005, max(abs(res))=0.0010,
energy=2.3602e−004, the local maximum point is (0.2526, 0.7578).
0
0
−1
−1
−2
−2
−3
−3
−4
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
−4
1
0.5
0
0
0.2
0.4
0.6
0.8
1
0
(x), ε = 10−5 (left)
Fig. 4.13. An interior 2-peak solution u2i1 with L = [u1i1 ], v 0 (x) = v(0.5,0.75)
0
and an interior 2-peak solution u2i2 with L = [u1i2 ], v 0 (x) = v(0.25,0.75)
(x), ε = 10−5 (right).
21
SOLVING SINGULARLY PERTURBED NEUMANN PROBLEMS
ε=10−5,mesh=5976,g−norm=4.94e−006,error=1.21e−004,max(abs(res))=0.0035,
energy=3.0194e−004,u−max=1.9623.The local maximum points are (0.25,0.25), (0.25,0.75),
(0.75,0.25) and (0.75,0.75).
ε=10−5,mesh=5976,g−norm=2.58e−006,error=7.18e−005,max(abs(res))=0.0022,
energy=2.2123e−004,u−max=1.9621, The local maximum points are (0.25,0.25),
(0.25,0.75) and (0.75,0.25).
0
0
−1
−1
−2
−2
−3
−3
−4
1
−4
1
0.8
0.6
0.4
0.2
0
0.4
0.2
0
0.8
0.6
0.8
1
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
0
Fig. 4.14. An interior 3-peak solution u3i2 with L = [u1i2 , u2i2 ], v 0 (x) = v(0.75,0.25)
(x), ε = 10−5
0
(left) and an interior 4-peak solution u4i2 with L = [u1i2 , u2i2 , u3i2 ], v 0 (x) = v(0.75,0.75)
(x), ε = 10−5
(right).
ε=10−4,mesh=19580,g−norm=6.15e−008,error=2.80e−007,max(abs(res))=1.17e−005,
energy=3.3660e−004,u−max=1.8587.The local maximum point is (0.25,0).
ε=10−4,mesh=19580,g−norm=4.99e−008,error=5.64e−007,max(abs(res))=2.13e−005,
energy=6.7319e−004,u−max=1.8587.The local maximum points are (0.25,0) and (0.25,1).
0
0
−1
−1
−2
−2
−3
−3
−4
1
10−4
−4
1
0.8
0.6
0.4
0.2
0.4
0.2
0 0
0.6
0.8
0.8
1
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
0
Fig. 4.15. A boundary-non-corner single-peak solution u1b with L = [0], v 0 (x) = v(0.25,0)
(x), ε =
0
(left) and a boundary-non-corner 2-peak solution u2b with L = [u1b ], v 0 (x) = v(0.25,1)
(x), ε =
10−4 (right).
ε=10−4,mesh=19580,g−norm=9.21e−006,error=3.66e−005,max(abs(res))=0.0016,
energy=0.0010,u−max=1.8640.The local maximum points are (0.25,0), (0.25,1) and (0.5,0).
ε=10−4,mesh=19580,g−norm=9.91e−006,error=3.95e−005,max(abs(res))=0.0022,
energy=0.0013,u−max=1.8656.The local maximum points are (0.25,0), (0.25,1) (0.75,0) and
(0.5,0).
0
0
−1
−1
−2
−2
−3
−3
−4
1
−4
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
0
(x), ε =
Fig. 4.16. A boundary-non-corner 3-peak solution u3b with L = [u1b , u2b ], v 0 (x) = v(0.5,0)
10−4 (left) and a boundary-non-corner 4-peak solution u4b with L = [u1b , · · · , u3b ], v 0 (x) =
0
v(0.75,0)
(x), ε = 10−4 (right).
22
XIE, YUAN and ZHOU
ε=10−4,mesh=19580,g−norm=9.92e−006,error=3.95e−005,max(abs(res))=0.0015,
energy=0.0017,u−max=1.8688.The local maximum points are (0.25,0), (0.25,1), (0.75,0), (0.5,1)
and (0.5,0).
ε=10−4,mesh=19580,g−norm=3.07e−006,error=1.24e−005,max(abs(res))=0.0007,
energy=0.0020,u−max=1.8658.The local maximum points are (0.25,0), (0.25,1), (0.75,0), (0.5,1),
(0.75,1) and (0.5,0).
0
0
−1
−1
−2
−2
−3
−3
−4
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
−4
1
0.5
0
Fig. 4.17.
0
(x), ε =
v(0.5,1)
0.2
0
0.4
0.6
0.8
1
A boundary-non-corner 5-peak solution u5b with L = [u1b , · · · , u4b ], v 0 (x) =
10−4 (left) and a boundary-non-corner 6-peak solution u6b with L =
0
(x), ε = 10−4 (right).
[u1b , · · · , u5b ], v 0 (x) = v(0.75,1)
ε=10−4,mesh=19580,g−norm=4.91e−006,error=2.23e−005,max(abs(res))=0.0007,
energy=0.0027,u−max=1.8903.The local maximum points are (0.25,0), (0.25,1), (0.75,0), (0.5,1),
(0.75,1), (0,0.75), (1,0.75) and (0.5,0).
ε=10−4,mesh=19580,g−norm=3.49e−006,error=1.51e−005,max(abs(res))=0.0006,
energy=0.0024,u−max=1.8808.The local maximum points are (0.25,0), (0.25,1), (0.75,0), (0.5,1),
(0.75,1), (0,0.75) and (0.5,0).
0
0
−1
−1
−2
−2
−3
−3
−4
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
−4
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
Fig. 4.18. A boundary-non-corner 7-peak solution u7b with L = [u1b , · · · , u6b ], v 0 (x) =
0
v(0,0.75) (x), ε = 10−4 (left) and a boundary-non-corner 8-peak solution u8b with L =
0
[u1b , · · · , u7b ], v 0 (x) = v(1,0.75)
(x), ε = 10−4 (right).
ε=10−4,mesh=19580,g−norm=1.78e−005,error=7.71e−005,max(abs(res))=0.0027,
energy=0.0030,u−max=1.8949.The local maximum points are (0.25,0), (0.25,1), (0.75,0), (0.5,1),
(0.75,1), (0,0.75), (1,0.75),(1,0.5) and (0.5,0).
ε=10−4,mesh=19580,g−norm=8.91e−006,error=6.24ee−005,max(abs(res))=0.0021,
energy=0.0034,u−max=1.8964.The local maximum points are (0.25,0), (0.25,1), (0.75,0), (0.5,1),
(0.75,1), (0,0.75), (1,0.75),(1,0.5), (0,0.5) and (0.5,0).
0
0
−1
−1
−2
−2
−3
−3
−4
1
−4
1
0.8
0.6
0.4
0.2
0
Fig. 4.19.
0
v(1,0.5)
(x), ε =
0
0.2
0.4
0.6
0.8
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
A boundary-non-corner 9-peak solution u9b with L = [u1b , · · · , u8b ], v 0 (x) =
10−4 (left) and a boundary-non-corner 10-peak solution u10
with L =
b
0
(x), ε = 10−4 (right).
[u1b , · · · , u9b ], v 0 (x) = v(0,0.5)
23
SOLVING SINGULARLY PERTURBED NEUMANN PROBLEMS
ε=10−4,mesh=19580,g−norm=1.26e−005,error=5.35e−005,max(abs(res))=0.0018,
energy=0.0037,u−max=1.9016.The local maximum points are (0,0.5), (0,0.75),(0.25,0),
(0.5,0), (0.75,0), (0.25,1), (0.5,1), (0.75,1), (1,0.25), (1,0.5), (1,0.75).
ε=10−4,mesh=19580,g−norm=2.68e−005,error=0.0013,max(abs(res))=0.0165,
energy=0.0040,u−max=2.1485.The local maximum points are (0,0.5), (0,0.75),(0.25,0),
(0.5,0), (0.75,0), (0.25,1), (0.5,1), (0.75,1), (1,0.25), (1,0.5), (1,0.75) and (0,0.25).
0
0
−1
−1
−2
−2
−3
−3
−4
1
−4
1
0.8
0.6
0.4
0.2
0
0.4
0.2
0
0.8
0.6
0.8
1
0.6
0.4
0.2
0
0.4
0.2
0
0.8
0.6
1
0
Fig. 4.20. A boundary-non-corner 11-peak solution
with L = [u1b , · · · , u10
b ], v (x) =
0
(x), ε = 10−4 (left) and a boundary-non-corner 12-peak solution u12
with
L =
v(0,0.25)
b
u11
b
0
0
−4 (right).
[u1b , · · · , u11
b ], v (x) = v(1,0.25) (x), ε = 10
ε=1/5, g−norm=4.0e−005, error=1.76e−004,max(abs(res))=4.16e−004,
energy=0.7878, u−max=2.7378 at ( 0.9993 , 0.9980 ).
ε=1/5 mesh=23102, g−norm=4.59e−006, error=4.77e−005,
max(abs(res))=1.04e−004, energy=0.2475, u−max=1.7157
2
0
−2
1.5
−4
1
−6
0.5
0
0
1
0.2
0.4
−8
0
1
0.5
0.5
0.6
0.8
1
0.5
0
1
0
{ }
Fig. 4.21. A positive solution u5 with L = 0 , v 0 (x) = cos(πx2 ), ε =
change solution with L = [u5 ], v 0 (x) = cos(πx2 ), ε =
ε=1/9, g−norm=1.72e−006, error=3.13e−005,max(abs(res))=6.56e−005,
energy=0.1589,u−max=2.1569.
1
5
1
5
(left) and a sign-
(right).
ε=1/9, g−norm=3.42e−007, error=6.59e−006,max(abs(res))=1.98e−005,
energy=0.3627,u−max=2.4082.
0
0
−1
−2
−2
−4
−3
−6
−4
1
0.5
0
0
0.2
0.4
0.6
0.8
1
−8
1
1
0.8
0.6
0.5
0.4
0.2
0
0
{ }
Fig. 4.22. A positive solution u9 with L = 0 , v 0 (x) = cos(πx2 ), ε =
change solution whose energy is larger than 0.25 with L = [u9
.
], v 0 (x)
1
9
(left) and a sign-
= cos(πx1 ), ε =
1
9
(right)
24
XIE, YUAN and ZHOU
ε=1/12, g−norm=1.06e−006, error=6.11e−006,max(abs(res))=1.55e−005,
energy=0.1212, u−max=2.1885 at ( 0.9980 , 0.0007 ).
ε=1/12, g−norm=3.82e−006, error=1.34e−005,max(abs(res))=9.26e−005,
energy=0.1903, u−max=1.4027 at ( 0.9980 , 0.0007 ).
0
0
−1
−2
−0.5
−3
−1
−4
1
1
0.5
0
0
0.2
0.4
0.6
0.8
−1.5
1
0.5
−2
Fig. 4.23. A positive solution u12
0
0.8
0.6
0.4
{ }1
with L = 0 , v 0 (x) = cos(πx2 ), ε =
solution whose energy is less than 0.25 with L = [u12 ], v 0 (x) = cos(πx1 ), ε
ε=1/15, g−norm=8.12e−007, error=1.88e−005,max(abs(res))=7.10e−005,
energy=0.0974, u−max=2.1988 at ( 0.9980 , 0.0007 ).
0.2
0
1
(left)
and
12
1
= 12
(right).
a positive
ε=1/15, g−norm=2.70e−006, error=1.77e−005,max(abs(res))=8.92e−005,
energy=0.1699,
u−max=1.8233 at ( 0.9980 , 0.0007 ).
0
−0.5
0
−1
−1
−1.5
−2
−2
−3
−2.5
−4
1
0.5
0
0
0.2
0.4
0.6
solution with L = [u15
0.5
0
Fig. 4.24. A positive solution u15
], v 0 (x)
0.8
−3
1
1
1
0.8
= cos(πx1 ), ε =
1
15
0.4
0.6
{ }
with L = 0 , v 0 (x) = cos(πx2 ), ε =
1
15
0.2
0
(left) and a positive
(right).
A Final Remark. The numerical algorithm developed in this paper is a local
one. When there are multiple solutions with the same Morse index, the solution
found by the algorithm depends on the initial guess selected. So one should use their
knowledge on the target solution to select an initial guess. Also the algorithm is
symmetry invariant but this symmetry invariance is sensitive to numerical error [21].
One may also carefully use this invariance to reduce the number of previously found
solutions in the support L in finding a symmetric solution with high Morse index. See
[22] for more detail.
Acknowledgement: The authors would like to thank Professors D.M. Cao, Q.Y.
Dai and Z.Q. Wang for their helpful discussion. The authors would also like to thank
the two anonymous reviewers for their useful suggestions.
REFERENCES
[1] H. Brezis and E. Lieb, A reaction between piontwise convergence of functions and convergence
of functionals, Proc. Amer. Math. Soc., 88(1983) 486-490.
[2] D. M. Cao and T. Kupper, On the existence of multipeaked solutions to a semilinear Neumann
problem, Duke Math. J., 97(1999) 261-300.
[3] C. M. Chen and Z.Q. Xie, Search extension method for multiple solutions of nonlinear problem,
Comp. Math. Appl., 47(2004) 327-343.
[4] M. Chipot (editor), Handbook of differential equations: stationary partial differential equations,
Volume 5, Elsevier B.V., 2008.
References
25
[5] S. N. Chow and R. Lauterbach, A bifurcation theorem for critical points of variational problems,
Nonlinear Anal., 12(1988) 51-61.
[6] M. Grossi, A. Pistoia, and J. Wei, Existence of multipeak solutions for a semilinear Neumann
problem via nonsmooth critical point theory, Calc. Var.,11(2000) 143-175.
[7] C. Gui, Multipeak solutions for a semilinear Neumann problem, Duke Math. J., 84(1996) 739769.
[8] C. Gui and J. Wei, Multiple interior peak solutions for some singularly perturbed Neumann
problems, J. Diff. Eqns., 158(1999) 1-27.
[9] C. Gui, J. Wei and M. Winter, Multiple boundary peak solutions for some singularly perturbed
Neumann problems, Ann. Inst. H. Poincare, Anal. Nonlinear, 17(2000) 47-82.
[10] Y. Li and J. Zhou, A minimax method for finding multiple critical points and its applications
to semilinear PDE, SIAM J. Sci. Comp., 23(2001) 840-865.
[11] Y. Li and J. Zhou, Convergence results of a local minimax method for finding multiple critical
points, SIAM J. Sci. Comp., 24(2002) 865-885.
[12] C. S. Lin and W. M. Ni, On the diffusing coeffient of a semilinear Neumann problem, Lecture
Notes in Math., Vol. 1340, Springer, Berline (1986), 160-174.
[13] C. S. Lin, W. M. Ni, and I. Takagi, Large amplitude stationary solutions to a chemotaxis
system, J. Diff. Eqns., (1988) 1-27.
[14] W. M. Ni and I. Takagi, On the Neumann probem for some semilinear elliptic equations and
systems of activator-inhibitor type, Trans. Amer. Math. Soc., 297(1986) 351-368.
[15] W. M. Ni and I. Takagi, On the shape of least-energy solutions to a semilinear Neumann
problem, Comm. Pure Appl. Math., 44(1991) 819-851.
[16] W. M. Ni and I. Takagi, Locating the peaks of least-energy solutions to a semilinear Neumann
problem, Duke Math. J., 70(1993) 247-281.
[17] P. Rabinowitz, Minimax method in critical point theory with applications to differential equations, CBMS Regional Conf. Series in Math., No. 65, AMS, Providence, 1986.
[18] S. L. Sobolev, Some applications of functional analysis in mathematical physics, Third edition,
AMS, 1991.
[19] I. Takagi, Point-condensation for a reaction-diffution system, J. Diff. Eqns., 61(1986) 208-249.
[20] Z. Q. Wang, On the existence of multiple single-peaked solution for a semilinear Neumann
problem, Arch. Rat. Mech. Anal., 120(1992) 375-399.
[21] Z.Q. Wang and J. Zhou, An efficient and stable method for computing multiple saddle points
with symmetries, SIAM J. Num. Anal., 43(2005), 891-907.
[22] Z.Q. Wang and J. Zhou, A Local Minimax-Newton Method for Finding Critical Points with
Symmetries, SIAM J. Num. Anal., 42(2004), 1745-1759.
[23] J. Wei, On the boundary spike layer solutions of singularly perturbed semilinear Neumann
problem, J. Diff. Eqs., 134(1997) 104-133.
[24] Z. Q. Xie, C. M. Chen, and Y. Xu, An improved search-extension method for computing
multiple solutions of semilinear PDEs, IMA J. Numer. Anal., 25(2005) 549-576.
[25] J. Zhou, Instability analysis of saddle points by a local minimax method, Math. Comp., 74(2005)
1391-1411.
[26] J. Zhou, Global sequence convergence of a local minimax method for finding multiple solutions
in Banach spaces, Num. Funct. Anal. Optim., 32(2011) 1365-1380.