ECON 4910 Spring 2007 Environmental Economics Lecture 11
advertisement

ECON 4910 Spring 2007
Environmental Economics
Lecture 11, Chapter 10 Kolstad
Lecturer: Finn R. Førsund
Unknown control cost
1
Designing contracts when purification cost
is unknown to the regulator
Two types, high-cost, H, and low-cost, L
Emissions measurable ex post
Contracts state permitted emission and a tax
The objectives of the contracts
Ensure participation of the firm, i.e. the gross
profit must be non-negative
Give incentive to tell the truth about the cost type,
i.e. tax according to type must induce truth-telling
Unknown control cost
2
Designing incentives
The problem is that type L has an incentive to
choose an H contract if L is not given pure
profit telling the truth. If L chooses an H
contract:
UL(H) = π –TH - cL(eH) = π –TH - cL(eH) + (cH(eH) cH(eH)) = (π –TH - cH(eH)) + cH(eH) - cL(eH) = UH +
cH(eH) - cL(eH) >0
Type L must be given the incentive
UL≥ UL(H) = UH + cH(eH) - cL(eH)
Unknown control cost
3
If type H chooses an L contract:
UH(L) = π –TL - cH(eL) = π –TL - cH(eL) + [cL(eL) cL(eL)] = π – TL - cL(eL) - cH(eL) + cL(eL) = UL cH(eL) + cL(eL)
If minimum for UL is inserted we get
UH(L) = UH + cH(eH) - cL(eH) – (cH(eL) - cL(eL)) < UH
Since type H will always choose an H
contract the tax can be designed so that pure
profit is zero. Type H has an incentive to tell
the truth anyway.
Unknown control cost
4
The regulator’s objective function
The objective function must reflect a conflict
between the two parties:
The benefit of taxes must also be included,
i.e. assuming that tax benefit the consumer
The general consumer experiencing the
environmental damage D(e)
The firm enjoying pure profit, Uj, j=L,H
W = T- D(e) + αU= π - c(e) – U - D(e) + αU =
π - c(e) - D(e) - (1- α)U , 0 ≤ α<1
The regulator must evaluate pure profit less
than environmental damage
Unknown control cost
5
Determining emission- and tax quantities
of the contracts
Maximising the expected value of the
objective function
E{W} = p(π – cL(eL) – D(eL) - (1-α)(cH(eH) - cL(eH) )
+ (1-p)(π – cH(eH) – D(eH) ) (setting UH = 0 )
Differentiating:
E{W }
p (cL (eL ) D(eL )) 0 cL (eL ) D(eL )
eL
E{W }
p (1 )(cL (eH ) cH (eH )) (1 p)(cH (eH ) D(eH )) 0
eH
p(1 )
D(eH ) cH (eH )
(cL (eH ) cH (eH )) cH (eH )
(1 p)
Unknown control cost
6
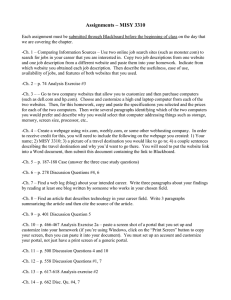
Illustration of giving an incentive to the
high-cost firm to tell the truth
-c’,D’
D’(e)
-cH’
D’ >-cH’
Efficiency loss
-cL’
-cH’
-cL’=D’
Savings in pure profit
Pure profit L
eL*
e
eH*
eH
Unknown control cost
7
Emission tax or quantity regulation
Direct regulation more in use than economic
incentives, why?
Simplifying:
Single firm that can be high-cost, H, or low-cost, L
Emissions not measured ex post
Finding tax t* and quantity regulation e* by
equating (-)expected marginal cost to
marginal damage
Unknown control cost
8
Illustration
Social loss using e* if
L and if H
-E{c’(e)}
D’(e)
Social loss if H
using t*
t*
-cH’
Social loss if L
using t*
-cL’
eL(t*)
eL
e
e*
eH eH(t*)
Unknown control cost
9
Pivoting the marginal damage function
Social loss using e* if
L and if H
-E{c’(e)}
D’(e)
Social loss if H
using t*
t*
-cH’
Social loss if L
using t*
-cL’
e
eL(t*)
eL
e*
eH eH(t*)
Unknown control cost
10
Pivoting the marginal cost functions
Social loss using e* if
L and if H
-E{c’(e)}
D’(e)
Social loss if H
using t*
t*
Social loss if L
using t*
eL(t*)
-cH’
-cL’
eL
e
e*
eH eH(t*)
Unknown control cost
11
Weitzman rule
With uncertain purification costs
Use emission tax if marginal purification cost
curve (absolute value) is relatively steeper than
the marginal damage curve
Use direct regulation if marginal damage curve is
relatively steeper than marginal cost curves
(absolute value)
Unknown control cost
12
Hybrid price/quantity regulation
Type of purification cost function for a single
firm unknown, but the regulator knows the
two types and can form expectations
Regulators quantity benchmark
Min e {E{c(e)} D(e)}
E{c '(e)} D '(e) 0 e e*
The contract stipulates that if ej> e*, then the
firm has to pay a tax t per unit emitted, if ej >
e*, then the firm gets a subsidy s per unit
emitted
Unknown control cost
13
Hybrid price/quantity regulation, cont.
Calculation of tax/subsidy scheme
Tax
Min e j (c j (e j ) t (e j e*) cj (e j ) t for e j e*
Subsidy
Min e j (c j (e j ) s(e * e j ) cj (e j ) s for e j e*
Unknown control cost
14
Illustration of hybrid contract
-E{c’(e)}
D’(e)
t
-cH’
s
-cL’
eL
e
e*
eH
Unknown control cost
15
Regulation with unobserved emission
Kolstad Chapter 11
Regulator cannot (or too expensive) observe
firm emissions, but can observe total amount
of pollutants deposited in the environmental
receptor
Regulator knows the purification cost
functions of each firm and the unit transport
coefficients (may be 1), and the damage
function
Then the regulator can work out the optimal
deposition
Unknown control cost
16
Regulation with unobserved emission,
cont.
Optimal total deposition
N
N
i 1
i 1
Min ei { ci (ei ) D( ai ei )}
N
ci(ei ) ai D( ai ei ) ai D( P), i 1,.., N
i 1
N
ei ei* , P* ai ei*
i 1
Unknown control cost
17
The tax scheme
The tax/subsidy on (unobserved) firm
emission is equal for all firms and
proportional to total exceedence in the
environmental receptor
Taxi t ( P P* )
Firm adaptation
N
Min ei {ci (ei ) t ( P P* )} {ci (ei ) t ( a j e j P* )}
j 1
N
{ci (ei ) tai ei t ( a j e j P* )} ci(ei ) tai
j ì
Unknown control cost
18
Calibration of the common tax rate
From the social solution
ci(ei ) ai D( P)
From the private solution
ci(ei ) tai
The optimal tax rate
t D( P )
Unknown control cost
19
Auditing an emission standard
The total cost of the firm concerning
emissions
c(e) E{F (e)},
( f (e s ) D) e s
F (e)
if
0
e
s
π probability of an audit
f fine per unit of emission above the regulation
D lump-sum fine
Unknown control cost
20
The firm’s decision problem
Assuming that violating the standard is
considered
Min e [c(e) E{F (e)}] c(e) ( f (e s ) D)
c(e) fe ( D s )
c(e) f
Unknown control cost
21
Illustration auditing an emission standard
Corner solution for e
-c’
Regulators choice of πf
(πf)’
πf
e
s
e*
Unknown control cost
22