Study
lib
Documents
Flashcards
Chrome extension
Login
Upload document
Create flashcards
×
Login
Flashcards
Collections
Documents
Last activity
My documents
Saved documents
Profile
Foreign Language
Math
Science
Social Science
Business
Engineering & Technology
Arts & Humanities
History
Miscellaneous
Standardized tests
Engineering & Technology
Computer Science
Artificial Intelligence
Natural Language Chhattisgarhi: A Literature Survey — Rijuka Pathak , Somesh Dewangan
Natural Events Abstract John Bell
NATIONAL UNIVERSITY OF SINGAPORE November 1999 Time Allowed: 2 Hours
National Science Foundation Cloud and Autonomic Computing Center
National Curriculum Subject: Computing Progression Map
National Conference on AI ------- PRESS BRIEFING
National Center for Geographic Informationand Analysis
NASSACHUISETTS A.I. A INSTITUTE
NASA_Visit_Presentation_4-26
NARROW AISLE MOBILE ROBOT NAVIGATION IN HAZARDOUS ENVIRONMENTS Ronald C. Arkin
Narrative Intelligence Michael Mateas Phoebe Sengers
Narrative Intelligence - School of Computer Science
Narrative Hermeneutic Circle: Improving Character Role
Narrative Event Adaptation in Virtual Environments
Narrative Causal Impetus: Governance through Situational Shift in Game of Thrones
narayanchen.ijcai13...
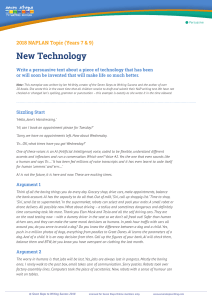
NAPLAN Persuasive Writing Exemplar: New Technology
Nano_World.Gillette.Summary - The University of Illinois Archives
Named Entity Recognition in Travel-Related Search Queries
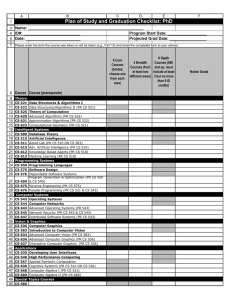
Name: _____________________________________________________ ID#: __________________________ Program Start Date: __________________
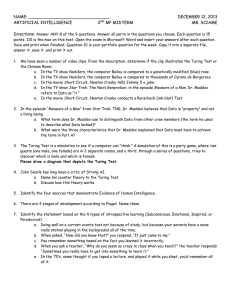
NAME: _______________________________ DECEMBER 12, 2013 ARTIFICIAL INTELLIGENCE 2
name: williams, joseph a. date prepared: 5/14/96
name: vocational skills for business grade 10
Name: Soodabeh Soleymani Profession: PhD. in Electrical
«
prev
1 ...
65
66
67
68
69
70
71
72
73
... 942
»
next
Suggest us how to improve StudyLib
(For complaints, use
another form
)
Your e-mail
Input it if you want to receive answer
Rate us
1
2
3
4
5
Cancel
Send