Laplace
advertisement

La transformada de Laplace
Y ( s ) Ly (t ) e st y (t )dt
0
1
La transformada de Laplace
Sea f(t) una función definida para t ≥ 0, su
transformada de Laplace se define como:
L{ f (t )} F ( s) f (t ) e dt
st
0
donde s es una variable compleja s iw.
Se dice que la transformada de Laplace de f(t) existe
si la integral converge.
2
Pierre-Simon Laplace
(1749 - 1827)
"Podemos mirar el estado presente del
universo como el efecto del pasado y
la causa de su futuro.
Se podría condensar un intelecto que
en cualquier momento dado sabría
todas las fuerzas que animan la
naturaleza y las posiciones de los
seres que la componen, si este
intelecto fuera lo suficientemente
vasto para someter los datos al
análisis, podría condensar en una
simple fórmula el movimiento de los
grandes cuerpos del universo y del
átomo más ligero; para tal intelecto
nada podría ser incierto y el futuro así
como el pasado estarían frente sus
ojos."
3
Observa que la transformada de Laplace es una
integral impropia, uno de sus límites es infinito:
e
st
0
Notación:
h
f (t )dt lim e
h
st
f (t )dt
0
L f (t ) F (s),
L y (t ) Y ( s),
L x(t ) X ( s ), etc.
4
Condiciones suficientes de existencia de la TL
L{ f (t )} F ( s) f (t ) e dt
st
0
Si f(t) es continua a trozos en [0, ∞) y
| f (t ) | Me at , t [0, )
Es decir, f(t) es de orden exponencial en el infinito:
b tq lim | f (t )ebt | 0
t
Entonces:
L{f(t)} = F(s) existe s > a.
5
Unicidad de la TL
Si f1(t) y f2(t) poseen la misma TL:
L{f1(t) } = L{f2(t) }= F(s),
Entonces el teorema de Lerch garantiza que
a
N (t )dt 0
0
a 0 y la función nula N(t) definida por :
N (t ) f1 (t ) f 2 (t )
6
Calcula la transformada de f(t) = 1:
1 s 1t
L
1 F (s) 1e dt e
0
s
st
0
1
s
1
f (t ) 1 F ( s)
s
Nota: Obviamente L{a} = a/s y L{0} = 0.
7
Calcula la transformada de f(t) = tn:
L t n F ( s)
0
st
n st
ne
t e dt t
s
0
0
st
e
nt n 1
dt
s
n n 1 st
n
t e dt L t n 1
s 0
s
n
L t L t n 1
s
1
0
L t
s
n
n
n!
L t n 1
s
n!
f (t ) 1 F ( s) n1
s
8
Calcula la transformada de f(t) = e-t:
F (s)
Le
t
1 s 1t
e
s 1
0
0
e e dt e
t st
0
s 1t
dt
1
s 1
1
f (t ) e F ( s)
s 1
t
9
Calcula la transformada de f(t) = Aeat:
L Ae F ( s) Ae e dt Ae
at
A s a t
e
( s a)
at st
0
0
0
s a t
dt
A
, sa
sa
A
f (t ) Ae F ( s)
, sa
sa
at
10
Calcula la transformada de f(t) = sen(at):
L sen(at ) F ( s)
a
e st
cos( at )
s
s
0
a2
a2
1 2 I 2 ;
s
s
0
0
st
e
sen(at )e dt sen(at )
s
st
0
e st
a sen(at ) dt a2 a2
s s
s
0
0
e st
a cos( at )
dt
s
sen(at )e st dt
a
I 2
s a2
f (t ) sen ( at )
a
F (s) 2
s a2
Ejercicio: calcula F(s) para f(t) = cos(at)
11
Calculemos la transformada de f(t) = eiat:
e cos( at ) i sen (at )
iat
F (s)
L e
iat
1
s ia t
e
s ia
0
0
e e dt e
iat st
0
s ia t
dt
1 s ia
s ia
2
2
s ia s ia s a
s
a
i
L
cos(
at
)
iL
sen
(
at
)
2
2
2
2
s a
s a
12
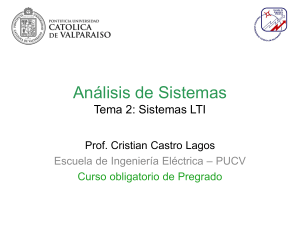
La función Heaviside o escalón unidad:
0 if t c
u (t c)
1 if t c
1
1
0
cc
h
t
L u (t c) e u (t c)dt lim e
s t
h
0
lim s1 e
h
st h
c
lim s1 (e
h
s h
e
s c
s t
dt
c
)e
s c
s
13
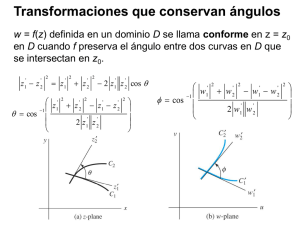
Función delta de Dirac
Sea la función parametrizada:
1
f (t ) u (t a) u t (a )
f (t )
área = 1
1/
Observemos que (t a) lim 0
a a
f (t )
t
as
( a ) s
s
1 e
e
as 1 e
L f (t )
e
s
s
s
s
s
as
1
e
se
as
as
lim 0 L f (t ) e lim 0
e lim 0
e
s
s
14
Así la transformada de la función delta de Dirac es:
L (t a) e
L (t ) 1
as
(t )
(t a)
a
t
15
Step function and delta
function
There are two common functions which are used
to represent very rapidly changing quantities. The
first of these is the step function, u(t), defined by:
1 t 0
u (t )
0 t 0
u(t)
t
16
Step function and delta
function
If the step function ‘switches on’ at t = a it is
defined by:
1 t a
u (t a )
0 t a
u(t-a)
t =a
t
17
Step function and delta function
The step function can be considered as the
limiting case of a very steep “ramp” function:
2b
18
Step function and delta function
The 2nd function is the delta function which is used
to represent point loads and other large inputs
applied over very small areas. It is defined by:
0 t 0
(t )
t 0
But it also satisfies:
(t )dt 1
19
Step function and delta function
The delta function can be considered as a limiting
case as shown below:
(t)
1/2b
2b
lim b 0
t
20
Step function and delta
function
The delta function for a point load at t=a is given
by:
0 t a
(t a )
t a
It has the properties:
a
(t a)dt 1
a
a
(t a) f (t )dt
f (a )
a
21
Laplace transform of the
step function
For the step function
1 t 0
u (t )
0 t 0
The Laplace transform is:
L{u (t )} e
0
st
1 st
1 0
1 dt e 0 e
s
0
s
1
L{u (t )}
s
22
Laplace transform of the
step function
For the step function
centred at t=a
1 t a
u (t a )
0 t a
The Laplace transform is:
L{u(t a )} e
a
0
st
0dt e
a
st
1 st
1dt 0 e
s
a
e as
L{u(t a )}
s
23
Laplace transform of the
delta function
For the delta function
0 t 0
(t )
t 0
The Laplace transform is:
L{ (t )} e st (t ) dt e st
t 0
1
0
L{ (t )} 1
24
Laplace transform of the
delta function
For the delta function
centred at t=a
0 t a
(t a )
t a
The Laplace transform is:
L{ (t a )} e st (t a ) dt e st
t a
e as
0
L{ (t a )} e as
25
Funciones periódicas
Supongamos que f (t) es una función periódica de periodo T.
Entonces:
1
F ( s ) L f (t )
F1 ( s )
sT
1 e
donde F1(s) es la tranformada de Laplace de la función f(t)
sobre el primer periodo y cero fuera.
T
F1 ( s) e
st
f (t )dt
0
T
t
t
26
Demostración
F ( s ) e st f (t )dt
0
T
0
T
T
0
0
e st f (t )dt e st f (t )dt
e st f (t )dt e s ( T ) f ( T )d ,
T
0
0
t T
e st f (t )dt e sT e s f ( )d
T
e st f (t )dt e sT F ( s )
0
27
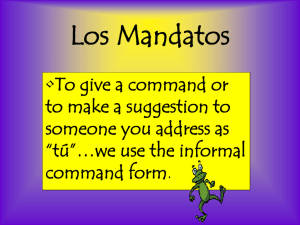
Ejemplo: onda cuadrada
T 2a
1
F ( s)
F (s)
2 as 1
1 e
a
2a
2a
F1 ( s) e
0
st
2a
1 as 2 as
f (t )dt e dt e e
s
a
st
e as e 2 as
1
F ( s)
2 as
s(1 e ) s(1 e as )
28
Tabla de transformadas de Laplace
t
1
1
s
1
s2
n!
1
t
tn
e
at
s
n 1
1
sa
sen t
cos t
e at sen t
e at cos t
t n e at
s2 2
s
s2 2
2
s
a
2
sa
s a 2
2
n!
s a
n 1
29
30
31
32
33
34
La TF es un caso particular de la TL
F [ f (t )] F ( ) fˆ ( )
f (t )e it dt
Supongamos que es complejo: = + i
fˆ ( i )
f (t )e
i ( i ) t
dt
f (t )e e
t
i t
dt
Antitransformando tendríamos:
f (t )e
t
1
2
ˆf ( i )ei t d
35
t
e
f (t )
2
ˆf ( i )ei t d
1
f (t )
2
Recordemos que
= + i:
ˆf ( i )e i ( i ) t d
1
f (t )
2
Im()
ˆf ( )ei t d
Im( )
ˆf ( )e i t es analítica para
Re ()
-γ
todo perteneciente a la
región en rojo.
Haciendo s = i( + i)
llegamos a la transformada de
36
Laplace.
Transformada inversa de Laplace
Al proceso inverso de encontrar f(t) a partir de F(s) se le
conoce como transformada inversa de Laplace y se
obtiene mediante:
1 i
st
L {F ( s )} f (t )
F ( s )e ds, t 0
2i i
1
conocida también como integral de Bromwich o integral
de Fourier-Mellin.
37
Im(s)
1 i
st
L {F ( s )} f (t )
F
(
s
)
e
ds, t 0
i
2i
γ determina un contorno vertical
γ
Re(s) en el plano complejo,tomado de
tal manera que todas las
singularidades de F(s) queden
a su izquierda.
1
Con condiciones de existencia:
(1) lim F ( s) 0
s
(2) lim sF ( s)
s
38
Por ejemplo, determinemos: L1
1
2
( s 1)
Puesto que la función a invertir tiene un polo en s = -1,
entonces basta con tomar γ > -1. Tomemos γ = 0 y el
contorno de integración C de la figura.
st
i
1
1
e
st
Im(s)
F
(
s
)
e
ds
ds
2
2i i
2i C (s 1)
R
C1
1 iR e st
1
e st
ds
2
2
γ=0
-1
Re(s) 2i iR ( s 1)
2i C1 ( s 1)
-R
Haciendo R→∞ y utilizando
teoría de residuos:
0 por la desigualdad ML
cuando R→∞ con t≥0.
e st
2i
d st
1
t
1
Res
lim
e te L
2
2
s
1
s
1
2i
ds
( s 1)
( s 1)
39
Sea F(s) una función analítica, salvo en un número finito
de polos que se encuentran a la izquierda de cierta vertical
Re(s) = γ. Y supongamos que existen m, R, k > 0 tq. para
todo s del semiplano Re(s) γ y |s| > R, tenemos que
m
| F ( s ) | k
s
Entonces si t > 0:
n
L1{F ( s )} Res e st F ( s )
k 1
s sk
donde s1 , s 2 ,..., s n son los polos de F ( s ).
En particular, sea F(s) = N(s)/D(s), con N(s) y D(s)
polinomios de grado n y d respectivamente, d > n;
entonces podemos usar la igualdad anterior.
40
Ejemplo, determinar: f (t ) L1
1
2
( s 2)( s 1)
st
e
e F ( s)
( s 2)( s 1) 2
posee dos polos, uno simple y otro doble : s1 2 y s 2 1.
st
e st
e st
f (t ) Res
Res
2
2
s 2 ( s 2)( s 1)
s 1 ( s 2)( s 1)
e st
d e st
e 2t 3tet e t
lim
lim
2
s 2 ( s 1)
s 1 ds s 2
9
41
Propiedades
1. Linealidad: Si c1 y c2 son constantes, f1(x) y
f2(x) son funciones cuyas transformadas de
Laplace son F1(x) y F2(x), respectivamente;
entonces:
L{c1 f1 (t ) c2 f 2 (t )} c1F1 (s) c2 F2 ( s).
La transformada de Laplace es un operador lineal.
42
Demostración:
L c1 f1 (t ) c2 f 2 (t )
c
f
(
t
)
c
f
(
t
)
e
1
1
2
2
0
st
dt
c1 f1 (t )e dt c2 f 2 (t )e dt
0
st
st
0
c1 L f1 (t ) c2 L f 2 (t )
43
2. Desplazamiento temporal
st
F ( s ) e f (t )dt
f (t t0 ), t t0
g (t ) f (t )u(t t0 )
, t t0
0
0
st
X ( s ) e f (t t0 )u (t t0 )dt
0
e
l t t0
st
f (t t0 )dt
t0
L{ f (t )} F ( s)
L{ f (t )u (t t0 )} e
st0
F ( s)
e st0 e sl f (l )dl
0
e
st 0
F (s)
44
Ejemplo:
3 s
1 e
L 3
s
L t
2
2
3
s
L (t 3) u (t 3) e
2
3 s
2
s3
3 s
1
e
1
2
L 3 (t 3) u(t 3)
s 2
3
t
45
Shift in t
Remember the definition of the Laplace transform:
F ( s) e st f (t )dt
0
Question: What happens to f(t) for t<0 ?
Answer: The Laplace transform assumes all
functions are zero for t<0.
Mostly we do not need to know this.
46
Shift in t
Define a shifted
function by:
ta
0
g (t )
f (t a) t a
f(t-a)
f(t)
t=a
t
47
Shift in t
The shifted function can
g (t ) u (t a) f (t a)
also be defined by:
The Laplace transform of the shifted function is
given by:
0
0
G( s ) e st g (t )dt e st u(t a ) f (t a )dt
a
0
a
G( s ) e st 0 f (t a )dt e st 1 f (t a )dt
G( s ) 0 e st f (t a )dt
a
48
Shift in t
Substitute =t-a:
G( s)
s ( a )
e
f ( )d
a a
G( s ) e sa
s
sa
e
f
(
)
d
e
F ( s)
0
G( s) Lg (t ) e sa F ( s)
49
Example - Shift in t
Calculate the Laplace transform of a square wave
shown by the diagram below
1
t=0
t=a
t=2a
t=4a
50
Example - Shift in t
Note that the 1st pulse can be constructed as
superposition of two step functions:
Step Function:
u(t)
t=a
t=0
Step Function:
-u(t-a)
51
Example - Shift in t
Then, the Laplace transform of the first pulse is :
L1st pulse Lu(t ) Lu(t a )
as
1
1
e
st
1 e as
L1 pulse
s s s
52
Example - Shift in t
To obtain the Laplace transform of the 2nd pulse, we
note that it is the 1st pulse shifted in time by 2a:
1
t=0
t=a
t=2a
t=4a
1
t=0
t=a
t=2a
t=4a
53
Example - Shift in t
Thus the Laplace transform is given by:
L 2 nd pulse e 2 as L 1st pulse
Similarly the Laplace transform of the 3rd pulse is (it
is shifted by 4a):
L 3rd pulse e 4 as L 1st pulse
54
Example - Shift in t
Thus the Laplace transform of the whole square
wave is given by:
Lsquare wave
L1st pulse L2 nd pulse L3rd pulse
1 e 2 as e 4 as L1st pulse
1 e
2 as
e
4 as
1
1 e as
s
55
Example - Shift in t
In this case we can sum the series (it is a geometric
series):
1 e
2 as
e
4 as
1 e
2 as 1
Thus:
1
1
as
Lsquare wave
1 e
2 as
1 e
s
1
1
1
as
1 e
as
as
as
(1 e )(1 e ) s
s(1 e )
56
3. Desplazamiento en frecuencias
L{ f (t )} F ( s)
F ( s ) e st f (t )dt
L{e at f (t )} F ( s a)
0
X (s) e e
st at
f (t )dt e
0
( s a ) t
f (t )dt
0
F ( s a)
Ejemplo:
1
L t 2
s
L te
at
1
2
( s a)
57
4. Cambio de escala en tiempo
F ( s) e
st
f (t )dt
0
X ( s ) e st f (at )dt
L{ f (t )} F ( s )
1 s
L{ f (at )} F
a a
0
1 ( s / a ) l
e
f (l )dl
a0
l at
(1 / a) F ( s / a)
58
5. Derivada de la transformada de Laplace
F (s) e
st
f (t )dt
0
d
d st
F ( s ) e f (t )dt
ds
ds
0
e
st
F ( s ) L{ f (t )}
F ( s ) L tf (t )
tf (t )dt
0
L tf (t )
59
6. Transformada de Laplace de las derivadas de
una función
La transformada de Laplace de la derivada de una
función está dada por:
L{ f ' (t )} sF ( s) f (0)
donde f(0) es el valor de f(t) en t = 0.
La transformada de Laplace de la segunda derivada
de una función está dada por:
L{ f ' ' (t )} s F ( s) sf (0) f ' (0)
2
60
En forma similar:
L{ f ( n ) (t )} s n F (s) s n1 f (0) s n2 f ' (0) f ( n1) (0)
lim e
t
Demostración:
L f ' (t ) e
st
f ' (t )dt e
0
st
st
f (t ) se
0
f (t ) 0
st
f (t )dt
0
f (0) s e
st
f (t )dt sF ( s ) f (0)
0
61
Supongamos que:
L{ f ( n1) (t )} s n1F (s) s n2 f (0) s n3 f ' (0) f ( n2) (0)
lim e st f ( n1) (t ) 0
Entonces:
t
L f ( n ) (t ) e st f ( n ) (t )dt e st f ( n 1) (t ) se st f ( n 1) (t )dt
0
0
0
f ( n 1) (0) s e st f ( n 1) (t )dt sL f ( n ) (t ) f ( n 1) (0)
0
s n F ( s) s n 1 f (0) s n 2 f ' (0) f ( n 1) (0)
62
63
64
Gracias a esta propiedad y a la linealidad de
la TL podemos convertir una ec. diferencial como
y " 3 y ' 4 y t u (t 1)
y (0) 1, y '(0) 2
Resolver para
y(t)
en una ec. algebraica
Y ( s)*( s 3s 4) ( s 1)
2
Resolver para
Y(s)
s 1
s 2 es
Ec. Diferencial
Transformada de
Laplace
Ec. Algebraica
Si resolvemos la ec. algebraica:
( s 1) ( s e 1) e
Y ( s)
2
2
s ( s 3s 4)
2
s
s
y encontramos la transformada inversa de
Laplace de la solución, Y(s), encontraremos
la solución de la ec. diferencial.
Ec. Algebraica
Inversa de la
Transformada
de Laplace
Solución de la
Ec. Diferencial
La transformada inversa de Laplace de:
( s 1) ( s e 1) e
Y ( s)
2
2
s ( s 3s 4)
2
y (t ) u (t 1)( e +
t
2
5e
s
3e4
80
s
t 4
(e ) 14 t 163 )
t 4
u (t )( e (e ) )
2
5
t
es
3
5
De modo que:
y (t ) u (t 1)( e +
t
2
5e
3e4
80
t 4
(e ) 14 t 163 )
t 4
u (t )( e (e ) )
2
5
t
3
5
es la solución de la ec. diferencial:
y " 3 y ' 4 y t u (t 1)
y (0) 1, y '(0) 2
Para conseguirlo hemos aplicado:
Primero, que la TL y su inversa son lineales:
L cf (t ) g (t ) = c L f (t )+ L g (t ) ,
1
L
cF (s) G(s) = c L F ( s)+ L G( s)
1
-1
Y segundo, la TF de las derivadas de una
función son:
L f '(t ) = s L f (t ) f (0), and
L f ''(t ) = s L f (t ) s f (0) f '(0)
2
etc...
A este método se le conoce como cálculo de Heaviside.
Por ejemplo:
f ' ' (t ) a1 f ' (t ) a0 f (t ) 0
{s 2 F ( s ) sf (0) f ' (0)} a1{sF ( s ) f (0)} a0 F ( s ) 0
sf (0) f ' (0) a1 f (0)
F ( s)
s 2 a1s a0
Y antitransformando obtendremos la solución.
Veamos un ejemplo concreto: Resolver la ec. diferencial
f ' (t ) 2 f (t ) e 3t
(t 0 y f (0) 4)
f ' (t ) 2 f (t ) e 3t 0 ; L{ f ' (t ) 2 f (t ) e 3t } 0
L{ f ' (t )} 2 L{ f (t )} L{e 3t } 0
1
( sF ( s ) f (0)) 2 F ( s )
0
s3
1
sF ( s ) 4 2 F ( s )
0
s3
5
1
F ( s)
f (t ) 5e 2t e 3t
s2 s3
Ejemplo
sin t 0 t
,
Resolver y y
t
0
y (0) y(0) 0
s Y ( s ) Y ( s ) L sin t u (t ) sin t
L sin t u (t ) sin( t )
2
1
e s
2
2
s 1 s 1
1
e s
Y ( s) 2
2
2
( s 1) ( s 1) 2
y(t ) 12 sin t t cos t u (t ) 12 sin( t ) (t ) cos(t )
12 sin t t cos t 0 t
1
t
2 cos t
74
Ejemplo:
Resolver y 3 y 2 y (t 1),
y(0) y (0) 0
s 2Y ( s) 3sY ( s) 2Y ( s) e s
1
1
s 1
Y ( s) e 2
e
s 3s 2
s
1
s
2
s
y(t ) u(t 1) e(t 1) e 2(t 1)
75
7. Transformada de Laplace de la integral de una
función
Si existe la TL de f(t) cuando Re(s) > p ≥ 0,
entonces:
F (s) e
st
L
f (t )dt
t
0
1
F ( s)
f (u )du L{ f (t )}
s
s
0
para Re(s) > p.
t
X ( s ) e f ( )d dt
0
0
st
1 st
1 st
f ( )d e e f (t )dt
0
s
0 s 0
t
1
F (s)
s
76
8. Transformada de Laplace de f(t)/t
L
t
0
F (s)
f (u )du
s
f (t )
L
s F (u )du
t
con F (s) L f (t )
Ejemplo:
sen t st
1
sen t
L
e dt ; L{sen t} 2
s 1
t 0 t
1
sen t
L
du arctg (u ) s arctg ( s )
2
2
t s u 1
77
Useful theorems - Integration
Integration.
Given:
Then
F ( s) L f (t ) e st f (t )dt
0
t
1
L F ( s ) f ( )d
s
0
1
78
Example - Integration
Use the integration result to
find the inverse transform of:
Put
Then
1
s ( s 1)
1
F ( s)
f (t ) e t
( s 1)
1 1
L
) e d e
s s 1 0
t
1
t
e ( 1) 1 e
t
0
t
79
9. TF de f(t)cos(at) y f(t)sen(at)
Si g (t ) f (t ) cos( at )
Si g (t ) f (t ) sen(at )
Ejemplo:
1
g (t ) sen(at )
t
F ( s ia ) F ( s ia )
G ( s)
2
con a
iF ( s ia ) F ( s ia )
G(s)
2
con a
a
a
i
( s ia ) 2 a 2 ( s ia ) 2 a 2
sen(at ) st
G(s)
e dt
t
2
0
a
a
i 2
2
2
s i 2a s i 2a 2a
2
s 4 4a 2
80
10. Teorema del valor final
Si lim f (t ) existe, entonces:
t
limt f (t ) lim s0 sF ( s)
11. Teorema del valor inicial
El valor inicial f(0) de la función f(t) cuya
transformada de Laplace es F(s), es:
f (0) limt 0 f (t ) lim s sF ( s)
81
12. Integral de convolución
Recordemos que
la operación
f1 ( ) f 2 (t )d se conoce
como la convolución de f1 (t ) y
denota como f1 (t ) * f 2 (t ).
f 2 (t ),
y se
La transformada de Laplace de esta operación
está dada por:
L{ f1 (t ) * f 2 (t )} F1 ( s) F2 ( s)
L{ f1 (t ) * f 2 (t )} L{ f1 (t )} L{ f 2 (t )}
82
Si trabajamos con funciones que son cero para para t < 0,
entonces la convolución queda:
t f ( ) g (t )d , t 0
f (t ) * g (t ) 0
0,
t0
Así que para estas funciones podemos definirla convolución
como:
t
f (t ) * g (t ) f ( ) g (t )d ,
0
(t 0)
83
L{ f1 (t ) * f 2 (t )} L{ f1 (t )} L{ f 2 (t )}
Ejemplo: Verificar que funciona para f(t) = t y g(t) = e-2t
con valores 0 para t < 0.
t
0
f (t ) * g (t ) f ( ) g (t )d e 2(t ) d
2t
t
1
e
2t
2
e e d
0
2 4
4
t
1
1
2t
L{t} 2 ; L{e }
s
( s 2)
1 1
1
2
2
s ( s 2) s ( s 2)
t 1 e 2t
L
4
2 4
1
1
1
L{t} L{1} L{e 2t }
2
4
4
1 1 11 1 1
2
2s
4 s 4 ( s 2)
1
s 2 ( s 2)84
De hecho, podemos utilizar la convolución para encontrar
transformadas inversas de Laplace:
1
1
1 1
t
L 2
L
t
e
2
s s 1
s ( s 1)
1
t
e t d e t t 1
0
85
Convolution theorem
For any functions f(t) and g(t) with:
F ( s) L f (t ) e st f (t )dt
0
G( s) Lg (t ) e st g (t )dt
0
Then
t
L f (t ) g ( )d F ( s )G ( s )
0
convolution integral
86
Convolution theorem and
inversion
For any functions F(s) and G(s) with:
L1F ( s) f (t )
Then
L1 G( s) g (t )
t
L1 F ( s)G( s) f (t ) g ( )d
0
Or
t
L F ( s )G( s ) f ( ) g (t )d
1
0
Do not use unless really necessary!
87
Convolution theorem – example
Use the convolution theorem to invert:
Put
Thus
s
F ( s) 2
( s 1)
f (t ) cos t
s
( s 2 1) 2
1
G( s) 2
( s 1)
g (t ) sin t
88
Convolution theorem – example
Now use
t
L1 F ( s )G( s ) f (t ) g ( )d
0
Thus
s
L 2
cos(t ) sin( )d
2
( s 1) 0
1
t
89
Convolution theorem –
example
Expand out
s
1
L 2
cos( t ) sin( )d
2
( s 1) 0
t
t
t
0
0
cos t cos sin d sin t sin sin d
After much work (see notes)
1
s
L 2
t sin t
2
( s 1) 2
1
90
Resolver la ec.integro-diferencial:
t
d
x(t ) 4 (t s ) x( s )ds et ; x(0) 1
0
dt
d
d t
d
d
t
x(t ) 4 (t s ) x( s )ds e ; L x(t ) 4 L h(t ) L{et }
0
dt
dt
dt
dt
t*x (t ) h (t )
1
sX ( s ) x(0) 4sL{h(t )} h(0)
s 1
1
sX ( s ) 1 4s L{t * x(t )} 0
;
L{t }L{ x (t )} 1 X ( s ) s 1
s2
4
1
sX ( s ) 1 X ( s )
s
s 1
91
4
1
sX ( s ) 1 X ( s )
s
s 1
2
s
X ( s)
( s 1)( s 2)( s 3)
1 1
1
1 1
X ( s)
3 s 1 s 2 3 s 2
Antitransformando:
1 t
1 2t
2t
x(t ) e e e
3
3
92
Desarrollo en fracciones parciales:
Se utiliza para facilitar el cálculo de la transformada inversa,
descomponiendo la función en componentes más sencillos.
N ( s) an s n an 1s n 1 a0
F ( s)
m
D( s )
s bm1s m1 b0
Raíces del denominador D(s) o polos de F(s):
Caso I – Polos reales simples
Caso II – Polos reales múltiples
( s a)
2
( s a)
Caso III – Polos complejos conjugados ( s a)( s a* )
Caso IV – Polos complejos conjugados ( s a)( s a* )
múltiples
2
93
Caso I – Polos reales simples
( s a)
A
sa
Ejemplo
N ( s)
s 1
s 1
F (s)
3 2
D( s ) s s 6s s ( s 2)( s 3)
A
B
C
s s2 s3
94
s 1
A
B
C
F ( s)
s( s 2)( s 3) s s 2 s 3
N ( s)
A ( s a )
D
(
s
)
s a
A
s 1
s
( s 2)( s 3) s 0
s 1
B
s2
s
(
s
3
)
s 2
s 1
C
s3
s( s 2) s 3
1
6
3
10
2
15
95
s 1
A
B
C
3
2
s s 6s s s 2 s 3
A( s 2)( s 3) Bs ( s 3) Cs( s 2)
s ( s 2)( s 3)
s 1 A( s 2)( s 3) Bs ( s 3) Cs( s 2)
s 1
A
( s 2)( s 3) s 0
método
alternativo
s 1 A( s 2 s 6) B( s 2 3s) C ( s 2 2s)
s 2 ( A B C ) s( A 3B 2C ) (6 A)
A B C 0;
A 3B 2C 1; 6 A 1
y resolver...
96
s 1
F ( s) 3 2
s s 6s
A
B
C
s s2 s3
1 1 3 1 2 1
6 s 10 s 2 15 s 3
La transformada inversa de Laplace es:
1 3 2 t 2 3t
f (t ) e e
6 10
15
97
Otro ejemplo
2s 2 7 s 3
2s 2 7 s 3
F (s) 2
( s 1)( s 2) ( s 1)( s 1)( s 2)
A
B
C
1
2
1
s 1 s 1 s 2 s 1 s 1 s 2
2s 2 7 s 3
273
A
1
( s 1)( s 2) s 1 (2)(1)
2s 2 7 s 3
273
B
2
(2)(3)
( s 1)( s 2) s 1
2s 2 7 s 3
8 14 3
C
1
( s 1)( s 1) s 2 (3)( 1)
Transformada inversa de Laplace:
f (t ) e t 2et e 2t
98
Caso II – Polos reales múltiples
( s a)
2
A
B
2
( s a) ( s a)
Ejemplo
N ( s)
s 4s 4
A B
C
D
F ( s)
2
2
D( s) s ( s 2)( s 1) s
s s 2 s 1
3
2
Polos reales
múltiples
Polos reales
simples
99
2 N (s)
A ( s a )
D( s) s a
d
2 N (s)
B ( s a)
D( s) s a
ds
s 4s 4
F ( s) 2
s ( s 2)( s 1)
3
A
s2
B
s
2
s 3 4s 2 4
(
s
2
)(
s
1
)
s 0
d s 3 4 s 2 4
ds ( s 2)( s 1) s 0
2
3
100
s 3 4s 2 4
F (s) 2
s ( s 2)( s 1)
A B
C
D
2
s
s s 2 s 1
1 1 1 1
2 2 3
s
s
s
2
s
1
Transformada inversa de Laplace:
f (t ) 2t 3 e 2t et
101
En general, para polos reales múltiples:
Ds
F s
N s
Ds s p1 s p2 s pn
r
a3
an
br
br 1
b1
a2
F s
r
r 1
s p1 s p2 s p3
s pn
s p1 s p1
br [ F ( s )( s p1 ) r ]s p1
d
br 1 [ F ( s )( s p1 ) r ]
ds
s p1
br j
br j
j
1 d
r
j F s s p1
j! ds
s p1
ai F s s pi s pi
1dj
r
j [ F ( s )( s p1 ) ]
j! ds
s p
1
1 d r 1
r
b1
r 1 [ F ( s )( s p1 ) ]
(r 1)! ds
s p
1
102
Caso III – Polos complejos conjugados
conjugados complejos
ejemplo
*
4
A
B
B
,
2
*
s(s 4) s s a s a
4
A 2
1
s 4 s 0
4
1
B
2
s ( s 2i ) s 2i
4
1
B
2
s( s 2i ) s 2i
*
( s a)( s a )
*
a 2i
1 1 1
1
s 2 s a s a *
Transformada inversa de Laplace:
x(t ) 1 cos( 2t )
103
ejemplo
s4
B
B*
,
2
*
s 6s 25 s a s a
a 3 4i
Transformada inversa de Laplace:
1
s4
B
(4 i )
8
s 3 4i s 3 4i
1
s4
*
B
(4 i )
s 3 4i s 3 4i 8
f (t ) 2 B et cos(t )
donde
1
17
B (4 i ), B
,
8
8
3, 4, 0.245
17 3t
f (t )
e cos( 4t 0.245)
4
104
Caso IV – factores complejos conjugados múltiples
(s a)( s a )
*
2
Se trata de repetir los métodos usados en los casos II y III,
teniendo en cuenta que trabajamos con complejos.
105
Partial Fractions – General Case
In the solution of ODEs by the Laplace Transform
Q( s )
method, expressions of the form
often occur.
P( s )
Here P(s) and Q(s) are both polynomials.
These are easy to invert if they are written in partial
fraction form:
an
Q( s)
a1
a2
P( s ) ( s 1 ) ( s 2 )
(s n )
Here
P( s) ( s 1 )( s 2 )( s n )
106
Partial Fractions – Complex
Roots
If 1 and 2 are a complex conjugate pair, then we
can avoid complex numbers by combining these factors
into a quadratic expression. Say 1 = -a+ib, 2= -a-ib,
then:
( s 1 )( s 2 ) (s a) b
2
2
Then
a3
an
Q( s)
A Bs
2
2
P( s) ( s a) b
(s 3 )
(s n )
107
Partial Fractions – Repeated
Roots
If 1 = 2 then the partial fraction form is:
a3
an
Q( s)
a1
a2
2
P ( s ) ( s 1 ) ( s 1 )
(s 3 )
(s n )
If 1 = 2 = 3 then the partial fraction form is:
a3
an
Q( s )
a1
a2
2
3
P ( s ) ( s 1 ) ( s 1 )
( s 1 )
(s n )
Etc, etc
108
Method 1 - Cover-up Rule
an
Q( s)
a1
a2
P( s ) ( s 1 ) ( s 2 )
(s n )
Basic idea:
• Multiply by a factor (s - i)
• Put s = i
• Evaluate ai
109
Cover-up Rule
Find the partial fraction form for:
1
s( s 1)
The partial fraction form is:
1
A
B
s( s 1) s ( s 1)
110
Cover-up Rule
To calculate A, multipy by s and put s=0:
1
B
s:
A s
( s 1)
( s 1)
1
Put s 0 : A 0 A 1
1
111
Cover-up Rule
To calculate B, multipy by s+1 and put s=-1:
1
( s 1) : ( s 1) A B
s
1
Put s 1 :
0 B B 1
1
Thus the partial fraction form is:
1
1
1
s( s 1) s ( s 1)
112
Cover-up Rule
The above procedure can be carried out by “covering
up”. For A use:
1
A
B
s( s 1) s ( s 1)
Now put s = 0, ignoring the covered up items:
1
A A1
0 1
113
Cover-up Rule
Similarly for B, “covering up” gives:
1
A
B
s( s 1) s ( s 1)
Now put s = -1, ignoring the covered up items:
1
B B 1
1
114
Complex Cover-up Rule
Find the coefficients A, B, C in:
1
A
Bs C
2
2
( s 1)( s 1) ( s 1) ( s 1)
Find A using the standard cover-up idea:
1
A
Bs C
2
2
( s 1)( s 1) ( s 1) ( s 1)
115
Complex Cover-up Rule
Put s+1 = 0, that is s = -1:
1
1
A A
2
(( 1) 1)
2
The coefficients B and C are more difficult to
calculate. A modified version of the cover-up rule
involves using complex factors
116
Complex Cover-up Rule
Multiply the whole equation by (s+i):
1
A
Bs C
( s i)
( s i) 2
( s i)
2
( s 1)( s 1)
( s 1)
( s 1)
1
( s i)
( s 1)( s i)( s i)
A
Bs C
( s i)
( s i)
( s 1)
( s i)( s i)
117
Complex Cover-up Rule
1
A
Bs C
( s i)
( s 1)( s i) ( s 1)
( s i)
Now put (s+i)=0, that is s = -i:
1
A
B( i) C
(0)
( i 1)( 2 i) ( i 1)
( 2 i)
After tidying up:
(i 1)
B i C
2
118
Complex Cover-up Rule
Equate real and imaginary parts:
1
1
B , C
2
2
Final partial fraction:
1
1
1
s
1
2
2
2
( s 1)( s 2 1) ( s 1) ( s 2 1)
119
Method 2 - Substitution of values
Q (bi )
an
a1
a2
P(bi ) (bi 1 ) (bi 2 )
(bi n )
Basic idea
• Put s = bi for i=1,2,…,n. Here bi are
convenient, easy to work with, numbers
• Obtain n equations in the n unknown ai
• Solve for ai
120
Substitution of values
Find the coefficients A, B, C in:
1
A B
C
2
2
s ( s 1) s s
( s 1)
Use cover-up for B
(s 2 ):
1
A B
C
2
2
s ( s 1) s s
( s 1)
Put s=0:
1
B B 1
(0 1)
121
Substitution of values
Use cover-up for C:
1
A B
C
2
2
s ( s 1) s s
( s 1)
Put s=-1:
1
C C 1
2
( 1)
122
Substitution of values
We cannot use cover-up for A. So far we have:
1
A 1
1
2
2
s ( s 1) s s
( s 1)
One good way to calculate A is to substitute a
convenient value for s. Say s =1:
1
1
1
A 1
1
A 1 A 1
2
2
2
2
1 (1 1) 1 1
(1 1)
123
Substitution of values
Substitute back:
1
1 1
1
2
2
s ( s 1)
s s
( s 1)
124
Example - substitution of
values
Substitute values to work out A and B in:
1
A
B
s( s 1) s ( s 1)
1 A B
1
1
Put s=1: A B
2 1 2
2
2
Put s=2:
1 A B
1
2
A B
6 2 3
3
3
125
Example - substitution of
values
Subtract two equations
1
B
B 1 A 1
6
6
Substitute back
1
1
1
s( s 1) s ( s 1)
126
Method 3 - Equate coefficients
Basic idea:
• Multiply whole equation by P(s)
• Equate coefficients of each power of s
• Solve resulting equations for ai
Q ( s ) a1 P1 ( s ) a 2 P2 ( s ) ... a n Pn ( s ),
P( s )
where Pi ( s )
s i
127
Example - Equate coefficients
Calculate A and B in:
1
A
B
s( s 1) s ( s 1)
Multiply by s(s+1):
Equate coefficients:
1 A( s 1) Bs
For s :
0 A B
For 1 :
1 A
A 1, B 1
128
Example - Equate
coefficients
Calculate
A and B in:
1
A
Bs C
2
2
( s 1)( s 1) ( s 1) ( s 1)
Multiply by
1 A( s 2 1) ( Bs C )( s 1)
(s+1)(s2 +1):
1 ( A B) s 2 ( B C ) s ( A C )
Equate coefficients:
For s 2 :
0 A B
For s :
0 BC
For 1 :
1 AC
1
1
1
A , B , C
2
2
2
129
Preferred method for
partial fractions
Calculate as many coefficients as possible using
the simple cover-up rule
Calculate the remaining coefficients by:
• Substituting values for s
• Using the complex cover-up method
• Equating coefficients
130
More on differential
equations
ODE problem
dny
d n 1 y
dy
an 1 n 1 a1
a0 y f (t )
n
dt
dt
dt
dy
d n 1 y
y (0) b1 ,
(0) b2 , ...,
(0) bn
n 1
dt
dt
Apply Laplace transform
P( s )Y ( s ) Q ( s ) F ( s )
131
More on differential
equations
Rearrange
Q( s)
P( s )
F ( s)
P( s)
Q( s) F ( s)
Y ( s)
P( s ) P( s )
This term comes from the initial conditions.
To invert, convert into partial fraction form,
then use tables and useful rules
This term comes from the right hand side of
the ODE. To invert, convert into partial fraction
form (if possible) then use tables. Otherwise use
partial fractions on 1/P(s) , invert, and then apply
the convolution theorem
132
Transfer function (optional
extra)
Input:
f(t)
System
If we forget about
the initial transient in
Then
Output:
y(t)
Q( s) F ( s)
Y ( s)
P( s ) P( s )
F ( s)
Y ( s)
1
Y ( s)
P( s )
F ( s ) P( s )
133
Transfer function (optional
extra)
Thus the transfer function
Can be written as:
1
P( s )
1
Y ( s ) Loutput
P( s ) F ( s )
Linput
1
If f(t)=(t) then F(s)=1 and Y ( s )
P( s )
Thus the transfer function is the Laplace transform of
the response of the system to an impulse (delta function)
134
Example (Laplace transform
solution of an ODE)
Solve the following problem using the Laplace
transform method:
d2y
dy
3
2 y 10 sin t ,
2
dt
dt
dy
y (0) 1, (0) 0
dt
Step 1. Define your transform
Y ( s) Ly (t ) e
st
y (t )dt
0
135
Example (Laplace transform
solution of an ODE)
Step 2. Transform the ODE:
d 2 y
dy
L 2 3 2 y L10 sin t
dt
dt
d 2 y
dy
L 2 L 3 L{2 y} L10 sin t
dt
dt
d 2 y
dy
L 2 3L 2 L{ y} 10Lsin t
dt
dt
136
Example (Laplace transform
solution of an ODE)
Use formulae from the tables
dy
2
s Y ( s ) dt (0) sy (0)
1
3sY ( s ) y (0) 2Y ( s ) 10 2
s 1
Tidy up
dy
10
[ s 3s 2]Y ( s )
(0) ( s 3) y (0) 2
dt
s 1
2
137
Example (Laplace
transform solution of an
ODE)
Step 3. Use the initial conditions and solve for Y(s):
dy
10
[ s 3s 2]Y ( s )
(0) ( s 3) y (0) 2
dt
s 1
2
10
[ s 3s 2]Y ( s ) ( s 3) 2
s 1
2
s3
10
Y ( s) 2
2
s 3s 2 ( s 3s 2)( s 2 1)
138
Example (Laplace transform
solution of an ODE)
Step 4. Find the partial fraction forms. First
s3
s3
A
B
2
s 3s 2 ( s 1)( s 2) s 1 s 2
Cover-up for A:
Put s = -1:
s3
A
B
( s 1)( s 2) s 1 s 2
( 1) 3
A A 2
( 1) 2
139
Example (Laplace transform
solution of an ODE)
Cover-up for B:
Put s = -2:
s3
A
B
( s 1)( s 2) s 1 s 2
( 2) 3
B B 1
( 2) 1
Substitute back:
s3
2
1
( s 1)( s 2) s 1 s 2
140
Example (Laplace transform
solution of an ODE)
Now work out the partial fraction form for:
10
As B
C
D
2
2
( s 1)( s 1)( s 2)
s 1 s 1 s 2
Use cover-up for C
10
As B
C
D
2
2
( s 1)( s 1)( s 2)
s 1 s 1 s 2
10
C C 5
Put s = -1:
2
(1) 1(1 2)
141
Example (Laplace transform
solution of an ODE)
Use cover-up for D
10
As B
C
D
2
2
( s 1)( s 1)( s 2)
s 1 s 1 s 2
10
Put s = -2:
D D 2
2
(2) 1(2 1)
Result so far:
10
As B
5
2
2
2
( s 1)( s 1)( s 2)
s 1 s 1 s 2
142
Example (Laplace transform
solution of an ODE)
To find B, put s = 0 :
10
A 0 B
5
2
(0 1)(0 1)(0 2)
0 1
0 1 0 2
10
B 5 1 B 1
2
143
Example (Laplace transform
solution of an ODE)
To find A, put s = 1 :
10
A 1 1
5
2
(1 1)(1 1)(1 2)
11
11 1 2
10
A1 5 2
223
2
2 3
5
4
2 A 5 1 A 3
3
3
144
Example (Laplace
transform solution of an
ODE)
Substitute back:
10
3s 1
5
2
2
2
( s 1)( s 1)( s 2)
s 1 s 1 s 2
Combine both partial fractions:
s3
10
Y ( s) 2
2
s 3s 2 ( s 3s 2)( s 2 1)
1 3s 1
5
2
2
Y ( s)
2
s 1 s 2 s 1 s 1 s 2
145
Example (Laplace transform
solution of an ODE)
Tidy up:
s
1
7
3
Y ( s ) 3 2
2
s 1 s 1 s 1 s 2
Step 5. Invert using tables. Look at each term
separately:
s
L 2
cos t
s 1
1
L 2
sin t
s 1
1
t
L
e
s 1
1
2 t
L
e
s 2
1
1
1
1
146
Example (Laplace transform
solution of an ODE)
Combine to invert Y(s):
s
1
7
3
y (t ) L {Y ( s )} L 3 2
2
s
1
s
1
s
1
s
2
s
1
1
1
1 1
1 1
3L 2
L
7
L
3
L
2
s
1
s
1
s
1
s
2
1
1
y (t ) 3 cos t sin t 7e t 3e 2t
147
Inversion of typical terms in
partial fractions
(I) Inversion of
From tables:
(II) Inversion of
A
( s a)
A
at
L
Ae
( s a)
1
A
(s a)n
n 1
A
A
1
t
at 1
at 1
at
L1
e
L
Ae
L
Ae
n
n
n
(
s
a
)
s
s
(n 1)!
148
Inversion of typical terms in
partial fractions
(III) Inversion of
A Bs
(s a)2 b2
A Bs
1 ( A Ba ) B ( s a )
L
L
2
2
2
2
(
s
a
)
b
(
s
a
)
b
1
A Bs
Bs
at 1 A Ba
L
e L 2
2
2
2
2
2
s b
s b
(s a) b
1
e
at
b
s
( A Ba ) 1
1
L 2
BL 2
2
2
b
s b
s b
149
Inversion of typical terms
in partial fractions
From tables:
A Bs
at ( A Ba )
L
e
sin bt B cos bt
2
2
b
( s a) b
1
150
Even more on Laplace transforms
and ODE’s
The Laplace transform method gives the result:
Q( s) F ( s)
Y ( s)
P( s ) P( s )
Here:
1
1
P( s ) ( s 1 )( s 2 ) ( s n )
151
Even more on Laplace transforms
and ODE’s
In the special case when f(t) is a polynomial,
exponential, sine or cosine or a sum of such terms,
then F(s) can be written in the partial fraction form:
Ck
B1
B1
B1
C1 C 2
F ( s)
2 k
(s 1 ) (s 1 )
(s 1 ) s
s
s
Thus the partial fraction form for F(s)/P(s) will be:
ck
b1
b1
b1
c1 c 2
F (s)
2 k
P( s) ( s 1 ) ( s 1 )
(s 1 ) s s
s
a1
a1
a1
(s 1 ) (s 1 )
(s 1 )
152
Even more on Laplace transforms
and ODE’s
Thus the part of y(t) arising from the inverse of
F(s)/P(s) will contain the following parts:
• The same kinds of functions as in the rhs f(t). (This
part corresponds to the particular integral of Module 3)
• A sum of several exponentials of the form below
(This part corresponds to the complementary function
of Module 3)
ai e it
153
Even more on Laplace transforms
and ODE’s
The real part of all the i determine whether or not the
system is stable:
• If any Re{i} are positive the solution will grow
exponentially with time. That means the system is
unstable.
• If all Re{i} are negative the solution will decay
exponentially with time. That means the system is stable.
154
Even more on Laplace transforms
and ODE’s
• If all Re{i} are zero the solution will oscillate with
time. That means the system is stable – except for the
case of resonance.
• The case of resonance occurs when one of the i is
the same as one of the i. In this case terms like that
ai
below will occur:
(s i ) 2
This leads to terms in the solution of the form below
which correspond to weak instability.
it
te
155
Final example
(summary of all methods)
Solve the following problem using the integrating factor
method, the guessing method and the Laplace transform
method:
dy
yt
dt
with
y ( 0) 1
156
Final example
(summary of all methods)
(a) Integrating factor method (Module 1).
Compare with the standard form:
dy
g (t ) y f (t )
dt
In our case g(t)=1, thus the integrating factor is given
by:
exp g (t )dt e t
157
Final example
(summary of all methods)
Multiply the ODE by the integrating factor:
dy
e
et y et t
dt
t
Use the product rule in reverse:
Integrate:
d t
e y et t
dt
et y
t
e
tdt C
158
Final example
(summary of all methods)
Use integration by parts on the rhs:
et y
t
t
t
e
t
dt
C
e
t
e
dt C
et t et C
t
y
t
1
Ce
Divide by the integrating factor:
Use the initial condition y(0)=1:
1 0 1 Ce0 C 2
Substitute back:
y t 1 2e t
159
Final example
(summary of all methods)
(b) Guessing method (see Module 3).
Step 1. Find the complementary
function. Solve:
dy
y0
dt
Try y=Celt. This gives the characteristic equation:
l 1 0 l 1
Thus:
y CF Ce
t
160
Final example
(summary of all methods)
Step 2. Find the particular integral. Try y PI a bt
dy PI
b
dt
Substitute in the ODE: b a bt t
Equate coefficients:
t term : b 1
1 term : b a 0 a b 1
yPI 1 t
161
Final example
(summary of all methods)
Step 3. Combine the particular integral and the
complementary function. The general solution is:
y y PI yCF
y 1 t Ce
t
Step 4. Use the initial condition y(0)=1:
1 1 0 Ce0 C 2
Substitute back:
y t 1 2e t
162
Final example
(summary of all
methods)
(c) Laplace Tranform method (see Module 5)
Step1.
Define your transform:
Y ( s) Ly (t ) e st y (t )dt
0
Step 2. Transform the ODE:
1
dy
L y Lt [ sY ( s ) y (0)] Y ( s ) 2
s
dt
163
Final example
(summary of all methods)
Tidy up:
1
( s 1)Y ( s ) y (0) 2
s
Step 3. Use the initial condition y(0)=1 and
solve for Y(s):
1
( s 1)Y ( s ) 1 2
s
1
1
Y ( s)
2
s 1 s ( s 1)
164
Final example
(summary of all methods)
Step 4. Put in partial fraction form. Find A,B,C for:
1
A B
C
2
2
( s 1)
s ( s 1) s s
Use cover-up to find B:
1
A B
C
2
2
( s 1)
s ( s 1) s s
s 0
B 1
165
Final example
(summary of all methods)
Use cover-up to find C:
1
A B
C
s 10 s 1
C 1
2
2
( s 1)
s ( s 1) s s
At this stage we have:
1
A 1
1
2
2
s ( s 1) s s
( s 1)
Put s = 1 :
1
A 1
1
2
A 1
2
1 (1 1) 1 1
(1 1)
166
Final example
(summary of all
methods)
Substitute back:
1
1 1
1
2
2
s ( s 1)
s
s
( s 1)
Combine all terms in Y(s):
1
1
Y ( s)
2
s 1 s ( s 1)
1
1 1
1
Y ( s)
2
s 1 s s
s 1
1 1
2
Y ( s) 2
s s
s 1
167
Final example
(summary of all methods)
Step 5. Invert using tables:
1 1
2
y (t ) L {Y ( s)} L 2
( s 1)
s s
1
1
1
1
1 1
1
y (t ) L L 2 2 L
s
s
( s 1)
1
y (t ) 1 t 2e t
168