incidence geometry
advertisement

INCIDENCE GEOMETRIES
CHAPTER 4
Contents
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
Motivation
Incidence Geometries
Incidence Geometry Constructions
Residuals, Truncations - Sections,
Shadow Spaces
Incidence Structures and
Combinatorial Configurations
Substructures, Symmetry and
Duality
Haar Graphs and Cyclic
Configurations
Algebraic Structures
Euclidean Plane, Affine Plane,
Projective Plane
Point Configurations, Line
Arrangements and Polarity
1.
2.
3.
4.
5.
6.
7.
8.
9.
Pappus and Desarguers
Theorem
Existence and Countnig
Coordinatization
Combinatorial Configurations
on Surfaces
Generalized Polygons
Cages and Combinatorial
Configurations
A Case Study – The Gray Graph
Another Case Study - Tennis
Doubles
Martinetti-Boben Theorem
1. Motivation
Motivation
• When Slovenia joined the European Union it
obtained 7 seats in the Parliament of the European
Union. In 2004 the first elections to the European
Parliament in Slovenia were held.
• There were 13 political parties (7 parliamentary
parties: 1, 2, 3, 4, 5, 6, 7, and 6 non-parliamentary
parties: A, B, C, D, E, F) competing for these
seats. TV Slovenia decided to cover the campain
by hosting political parties in 6 TV shows:
a,b,c,d,e,f.
• TV asked mathematicians to help them select the
guests in a fair way.
Motivation
• With a little help from mathematicians TV
came up with the following schedule.
a
A
1
4
5
b
B
2
6
c
C
3
4
d
D
1
7
e
E
2
5
f
F
3
6
7
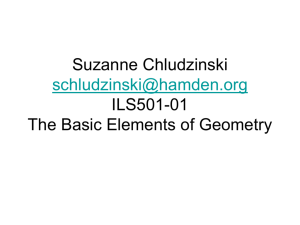
Example – TV coverage of EU
parliamentary elections in Slovenia
TV Shows
Parties
A
1
4
B
2
6
C
3
4
D
1
7
E
2
5
F
3
6
5
a
b
c
d
e
f
7
Model
• We can model the above schedule as
follows:
• Let P = {1,2,3,4,5,6,7,A,B,C,D,E,F}
• Let L = {a,b,c,d,e,f}
• Let I ½ P £ L such that
• (p,L) 2 I if and only if political party p
appears in the show L.
• I = {(A,a), (1,a), (4,a), (5,a), ... }
Incidence structure
• An incidence structure C is a triple
– C = (P,L,I) where
• P is the set of points,
• L is the set of blocks or lines
– I P L is an incidence relation.
– Elements from I are called flags.
Levi Graph
• The bipartite incidence graph G(C) with
black vertices P, white vertices L and edges
I is known as the Levi graph of the
structure C.
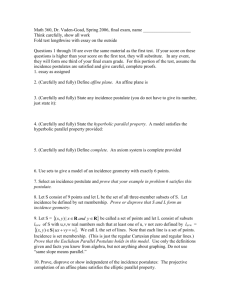
Levi graph for the Election
structure
A
a
4
c
1
5
e
C
b
B
D
2d
E
6
3
f
7
F
• On the left there is the
Levi graph for the
incidence structure of the
media coverage of the
European Union
Parliament elections in
Slovenia.
• Each parliamentary party
appears twice and each
non-parliamentary party
appears once. (check
valence!)
Menger graph
• Given an incidence structure C = (P,L,I) we
say that two points p and q are collinear, if
there is a line L that contains both of them.
• Menger graph M(C).
• Vertices P
• p ~ q if and only if p and q are collinear.
Menger Graph from Levi Graph
• There is a simple procedure for computing M from
L. Take the pure graph power L(2). It is obtained
from L by taking the same vertex set and making
two vertices adjacent in L(2) if and only if they are
at distance two in L. Since L is bipartite L(2). has
(at least) two components. The one defined on the
black vertices (corresponding to points of the
incidence structure) is Menger graph M. The other
one is called dual Menger graph.
Menger graph for the Election
structure
A
4
1
5
B
C
D
2
E
6
3
F
7
• On the left there is the
Menger graph for the
incidence structure of
the media coverage of
the European Union
Parliament elections in
Slovenia.
Configuration Graph
The configuration graph K is the
complement of the Menger graph. The dual
configuration graph is the complement of
the dual Menger graph.
Dual Configuration graph for the
Election structure
e
c
d
b
• On the left there is the
dual configuration
f
graph for the
incidence structure of
the media coverage of
the European Union
a
Parliament elections in
Slovenia.
Dual Configuration graph for the
Election structure
e
c
d
b
• The Hamilton path
abcdef in the dual
f
configuration graph
guarantees that no
political party appears
in two consecutive TV
a
shows.
Examples
• 1. Each graph G = (V,E) is an incidence structure:
P = V, L = E, (x,e) 2 I if and only if x is an
endvertex of e.
• 2. Any family of sets F µ P(X) is an incidence
structure. P = X, L = F, I = 2.
• 3. A line arrangement L = {l1, l2, ..., ln} consisting
of a finite number of n distinct lines in the
Euclidean plane E2 defines an incidence structure.
Let V denote the set of points from E2 that are
contained in at least two lines from L. Then: P = V,
L = L and I is the point-line incidence in E2.
Exercises 1
• N1. Draw the Levi graph of the
incidence structure defined by the
complete bipartite graph K3,3.
• N2. Draw the Levi graph of the
incidence structure defined by the
power set P({a,b,c}).
• N3. Determine the Levi graph of the
incidence structure, defined by an
arrangement of three lines forming a
triangle in E2.
• N4 Determine the Levi graph of the
line arrangement on the left.
2. Incidence Geometry
Incidence geometry
• An incidence geometry (G,c) of rank k is a graph
G with a proper vertrex coloring c, where k colors
are used.
• Sometimes we denote the geometry by (G,~,T,c).
Here c:V(G) ! T is the coloring and |T| = k is the
number of colors, also known as the rank of G.
The relation ~ is called the incidence.
• T is the set of types. Note that only objects of
different types may be incident.
Morphisms or representations
• Given two incidence geometries (G,~,c,T)
and (G',~,c',T') a pair (f,g) of mappings
• f: G ! G' and
• g: T ! T' is called a morphism of geometries
(or representation) if the following is true:
• for any v 2 V(G) c'(f(v)) = g(c(v)).
• for any u,v 2 V(G): if u ~ v then either f(u) = f(v) or
f(u) ~ f(v).
Special morphisms
• Some morphisms have nice properties and deserve special attention.
• We call a representation dimension-preserving if
• for any u,v 2 V(G): if u ~ v then f(u) ~ f(v).
• We call a representation faithful or strong if
• for any u,v 2 V(G): u ~ v if and only if f(u) ~ f(v).
• A faithful representation in which both f and g are injective is called
realization.
• A morphism is an isomorphism if both f and g are bijections and the
inverse pair (f-1,g-1´) is a morphism too.
• The image of a representation is geometry. The image of a realization
is isomorphic to the original.
• For stirng geometries we seek representations and realizations in sets.
Vertices are mapped to the elements (or singletons) of S and the faces
to subsets of S. The incidence ui ~ uj, i < j is represented by inclusions
S(ui) µ S(uj).
Automorphisms
• There are two types of automorphisms in a
geometry (G,~,c,T). Aut0 G contains typepreserving automorphisms. (g = id). Aut G
contains all (extended) automorphisms.
• In the case of string geometries we want the
linear order on T to be respected (or
reversed). In the case of extended
automorphisms we speak of dualities that
map faces of rank r to rank n-r.
Examples
• 1. Each incidence structure is a rank 2 geometry. (Actualy,
look at its Levi graph.)
• 2. Each 3 dimensional polyhedron is a rank 3 geometry.
There are three types of objects: vertices, edges and faces
with obvious geometric incidence.
• 3. Each (abstract) simplicial complex is an incidence
geometry. Incidence is defined by inclusion of simplices.
• 4. Any complete multipartite graph is a geometry. Take for
instance K2,2,2, K2,2,2,2, K2,2, ..., 2. The vertex coloring
defining the geometry in each case is obvious.
Pasini Geometry
• Pasini defines incidence geometry (that we call
Pasini geometry) in a more restrictive way.
– For k=1, the graph must contain at least two vertices:
|V(G)|>1.
– For k>1:
• G has to be connected,
• For each x V(G) the (k-1)-colored graph (Gx,c), called
residuum, induced on the neigbors of x is a Pasini geometry
of rank (k-1).
String geometries
•
1.
2.
3.
A geometry G over the set of types T = {-1,0,1, ..., n} is called a
string geometry if the following (1-2) is true (the elements of G are
called faces, faces of type 0 are called vertices (or points), faces of
type 1 are called edges (or lines), faces of type n-1 are called
facets.). It is called pure string geometry if (1-3) is true.
There are exactly two improper faces u-1 2 V(G) of type -1 and one
element un 2 V(G) of type n (both incident with every other face).
The rest are called proper faces.
If ui, uj, uk are elements of respective types i < j < k and ui ~ uj, uj
~ uk, then ui ~ uk.
Every collection of mutually incident faces U can be extended to a
sequence of (n+2) mutually incident faces. (In other words: all
chambers have rank n+2.)
Incidence geometries of rank 2
• Incidence geometries of rank 2 are simply
bipartite graphs with a given black and
white vertex coloring.
• Rank 2 Pasini geometries are in addition
connected and the valence of each vertex is
at least 2: d(G) >1.
Example of Rank 2 Geometry
• Graph H on the left is
known as the
Heawood graph.
• H is connected
• H is trivalent: d(H) =
D(H) = 3.
• H is bipartite.
• H is a Pasini geometry.
Another View
• The geometry of the
Heawood graph H has
another interpretation.
• Rank = 2. There are two
types of objects in
Euclidean plane, say,
points and curves.
• There are 7 points, 7
curves, 3 points on a
curve, 3 curves through a
point.
• The corresponding Levi
graph is H!
In other words ...
• The Heawood graph (with a given black and white
coloring) is the same thing as the Fano plane (73),
the smallest finite projective plane.
• Any incidence geometry can be interpeted in
terms of abstract points, lines.
• If we want to distinguish the geometry
(interpretation) from the associated graph we refer
to the latter as the Levi graph of the
corresponding geometry.
Simplest Rank 2 Pasini Geometries
Cycle
(Levi Graph)
Triangle
(Geometry)
• “Simplest”
geometries of rank
2 in the sense of
Pasini are even
cycles. For instance
the Levi graph C6
corresponds to the
triangle.
Rank 3
• Incidence geometries of rank 3 are exactly 3colored graphs.
• Pasini geometries of rank 3 are much more
restricted. Currently we are interested in those
geometries whose residua are even cycles.
• Such geometries correspond to Eulerian surface
triangulations with a given vertex 3-coloring.
Flag System as Geometries
• Any flag system µ V £ E £ F defines a
rank 3 geometry on X = V t E t F. There are
three types of elements and two distinct
elements of X are incicent if and only if
they belong to the same flag of .
Self-avoiding maps
• Recall that a map is self-avoiding if and
only if neither the skeleton of the map nor
the skeleton of its dual has a loop.
Self-avoiding maps as
Geometries of rank 4
• Consider a generalized flag system µ V £ E £ F
£ P that defines a rank 4 geometry on X = V t E t
F t P.
• There are four types of elements and two distinct
elements of X are incident if and only if they
belong to the same flag of .
• We may take any self-avoiding map M and the
four involutions 0,1,2 and 3 and define a
geometry as above.
Exercises 2
• N1. Prove that the Petrie dual of a selfavoiding map is self-avoiding.
• N2. Prove that any operation Du,Tr,Me,Su1,
... of a self-avoiding map is self-avoiding.
• N3. Prove that BS of any map is selfavoiding.
• N4. Show that any self-avoiding map may
be considered as a geometry of rank 4 (add
the fourth involution).
Homework 2
• H1 Describe the rank
4 geometry of the
projective planar map
on the left.
3. Incidence Geometry
Constructions
Geometries from Groups
• Let G be a group and let {G1,G2,...,Gk} be a
family of subgroups of G.
• Form the cosets xGt, t 2 {1,2, ..., k}.
• An incidence geometry of rank k is
obtained as follows:
• Elements of type t 2 {1,2,...,k} are the cosets xGt.
• Two cosets are incident: xGt ~ yGs if and only if
xGt Å yGs ;.
Q – The Quaternion Units
Q
1
-1
i
1
1
-1
i
-1
-1
1
-i
i -i j -j
i -i j -j
-i i -j j
-1 1 k -k
k -k
k -k
-k k
-j j
-i -i i 1 -1 -k k j -j
j j -j k -k -1 1 i -i
-j -j j -k k 1 -1 -i i
k k -k j -j -i i -1 1
-k -k k -j j i -i 1 -1
Geometry from Quaternions
• Example: Q = {+1,-1,+i,-i,+j,-j,+k,-k}.
• Gi = {+1,-1,+i,-i}, Gj = {+1,-1,+j,-j}, Gk ={+1,1,+k,-k}.
Quaternions - Continiuation
j,k
• The Levi graph is an
octahedron.
• Labels on the left:
• i = {+1,-1,+i,-i}
• j,k = {+j,-j,+k,-k}, etc.
k
j
i
i,k
i,j
Quaternions– Examle of Rank 4
Geometry.
j,k
• Levi graph was an
octahedron.
• Notation:
• i = {+1,-1,+i,-i}
• j,k = {+j,-j,+k,-k}, etc.
k’
j’
k
1
• If we add the sugroup G0
= {+1,-1}, four more
cosets are obtained:
• Additional notation:
j
i
• 1 = {+1,-1},i’={+i,-i}, etc.
i’
i,k
i,j
Reye’s Configuration
• Reye’s configuration of
points, lines and planes in 3dimensional projective space
consists of
• 8 + 1 + 3 = 12 points (3 at
infinity)
• 12 + 4 = 16 lines
• 6 + 6 = 12 planes.
P=12
L=16 S=12
P=12
-
4
6
L=16
3
-
3
S=12
6
4
-
Theodor Reye
• Theodor Reye (1838 1919), German
Geometer.
• Known for his book
Geometrie der Lage (1866
and 1868).
• Published his famous
configuration in 1878.
• Posed “the problem of
configurations.”
Centers of Similitude
• We are interested in
tangents common to
two circles in the
plane.
• The two intersections
are called the centers
of similitudes of the
two circles. The blue
center is called the
internal, the red one is
the external center.
• If the radii are the
same, the external
center is at infinity.
Reye’s Configuration -Revisited
• Reye’s configuration can
be obtained from centers
of similitudes of four
spheres in three space (see
Hilbert ...)
• Each plane contains a
complete quadrangle.
• There are
2 C(4,2) = 2 4 3/2 = 12
points.
Exercises 3-1
• N1. Consider the geometry defined by Z3
and Z5 in Z15. Draw its Levi graph.
• N2. Draw the Levi graph of the geometry
defined by all non-trivial subgroups of the
symmetric group S3.
• N3. Draw the Levi graph of the geometry
defined by all non-trivial subgroups of the
group Z23.
Exercises 3-2
• N4. Let there be three circles in a plane
giving rise to 3 internal and 3 external
centers of similitude. Prove that the three
external centers of similitude are colinear.
4. Residuals, Truncations - Sections,
Shadow Spaces
Residual geometry
• Each incidence geometry
Gx
x
•
•
•
•
•
G
G =(G, ~, T,c)
(G,~) a simple graph
c, proper vertex coloring,
T collection of colors.
c: V(G) ! T
• Each element x 2 V(G)
determines a residual
geometry Gx. defined by
an induced graph defined
on the neighborhood of x
in G.
Flags and Residuals
• In an incidence geometry G a clique on m vertices
(complete subgraph) is called a flag of rank m.
• Residuum can be definied for each flag F ½ V(G).
G(F) = Å{G(x) = Gx |x 2 F}.
Chambers and Walls
• A maximal flag (flag of rank |T|} is called a
chamber. A flag of rank |T|-1 is called a wall.
• To each geometry G we can associate the chamber
graph:
• Vertices: chambers
• Two chambers are adjacent if and only if they share a common
wall.
• (See Egon Shulte, ..., Tits systems)
The 4-Dimensional Cube Q4.
0010
0001
0000
0100
1000
Hypercube
• The graph with one vertex
for each n-digit binary
sequence and an edge
joining vertices that
correspond to sequences
that differ in just one
position is called an ndimensional cube or
hypercube.
• v = 2n
• e = n 2n-1
4-dimensional Cube.
0110
0010
0111
0011
1110
1010
1011
1111
0001
1101
1001
0000
0100
1000
1100
4-dimensional Cube and a Famous
Painting by Salvador Dali
• Salvador Dali (1904 –
1998) produced, in
1954, the Crucifixion
(Metropolitan
Museum of Art, New
York) in which the
cross is a 3dimensional net of a 4dimensional
hypercube.
4-dimensional Cube and a Famous
Painting by Salvador Dali
• Salvador Dali (1904 –
1998) produced in
1954, the Crucifixion
(Metropolitan
Museum of Art, New
York) in which the
cross is a 3dimensional net of a 4dimensional
hypercube.
The Geometry of Q4.
•
•
•
•
•
•
Vertices (Q0) of Q4: 16
Edges (Q1)of Q4: 32
Squares (Q2) of Q4: 24
Cubes (Q3) of Q4: 8
Total: 80
The Levi graph of Q4 has 80 vertices and is
colored with 4 colors.
Residual geometries of Q4.
V
E
S
Q3.
G(V)
-
4
6
4
G(E)
2
-
3
3
G(S)
4
4
-
2
G(Q3)
8
12
6
-
Truncations or Sections
• Given a geometry G = (V,~,T,c) and a
subset of types J µ T, define a J-section G/J
of G as the geometry H = (U,~,J,c), where
U = {v 2 V| c(v) 2 J} and H is the induced
subgraph of G.
Quaternions– Example of Rank
4 Geometry - Section
j,k
k’
j,k
j’
k
1
k
j
j
i
i
i’
i,k
i,j
Rank 4 geometry
i,j
i,k
Rank 3 section
Shadow Spaces
• Given a geometry G = (V,~,T,c) and J µ T
we may define an incidence structure
Spa(G,J) whose points are J-flags and the
blocks are composed of those sets of J-flags
that belong to the residual geometry G(F)
for some flag F from the original geometry
G.
Shadow Spaces - An Example
4
3
• Let us denote the types
• I = {g,r,b}.
• Let J = {r,b}. There are three Jflags: 26, 45 and 56. The set system
for the shadow space:
5
6
• {{45},{26},{45,56},{26,56}}.
• For J = {g,b} we get three flags:
• {16,14,34}
1
2
• The set system for the shadow
space:
• {{16},{34},{14,16},{14,34}}
Shadow spaces of Maps
• For maps as rank 3
geometries the notion
of shadow spaces
gives rise to an
interesting
interpretation. There
are three types of
objects {v,e,f}.
• Hence, there are 7
types of shadow
spaces:
•
•
•
•
•
•
•
{v} - primal: id
{e} - medial: Me
{f} - dual: Du
{v,e} - truncation: Tr
{v,f} - Me Me
{e,f} - leapfrog: Le
{v,e,f}- Co
Shadows - Example
• Our map is a prism. All flags (structured by type):
4
5
c
h
E
g
6
d
C i
D
3
e
b
f
B
a
1
A
2
•
•
•
•
•
•
;,
1,2,3,4,5,6
a,b,c,d,e,f,g,h,i
A,B,C,D,E
1a,1d,1e,2a,2b,2f,3e,3f,3i,4c,4d,4h,5b,5c,5g,6g,6h,6i
1A,1B,1C,2A,2B,2D,3B,3C,3D,4A,4C,4E,5A,5D,5E,6C,6
D,6E
• aA,aB,bA,bD,cA,cE,dA,dC,eB,eC,fB,fD,gD,gE,hC,hE,iC,
iD
• 1aA,1aB,1dA,1dC,1eB,1eC,2aA,2aB,2bA,2bD,2fB,2fD,3e
B,3eC,3fB,3fD,3iC,3iD,4cA,3cE,4dA,4dC,4hC,4h
E,5bA,5bD,5cA,5cE,5gD,5gE,6gD,6gE,6hC,6
hE,6iC,8iD
Shadows - Example - Primal
• Our map is a prism. T ={v,e,f}:
4
5
c
h
E
g
6
d
C i
D
3
e
b
f
B
a
1
A
2
• J = {v}
• J-flags: 1, 2, 3, 4, 5, 6
• Sets: 12, 13, 14, 23, 25, 36, 45, 46, 56, 123, 456, 1245,
1346, 2356.
Shadows - Example - Dual
• Our map is a prism. T = {v,e,f}:
4
5
c
h
E
g
6
d
C i
D
3
e
b
f
B
a
1
A
2
• J = {f}
• Flags: A,B,C,D,E
• Sets: AB, AC, AD, AE, BC, BD, CD, CE, DE, ABC,
ABD, BCD, CDE, ACE, ADE.
Shadows - Example - Medial
• Our map is a prism. T = {v,e,f}:
4
5
c
h
E
g
6
d
C i
D
3
e
b
f
B
a
1
A
2
• J = {e}
• Flags: a,b,c,d,e,f,g,h,i
• Sets: ae,ab,ad,af,bc,bf,bg,cd,cg,ch,de,dh,ef,ei,fi,gh,gi,hi,
aef, bfgi, dehi, abcd,cgh.
Shadows - Example - Truncation
• Our map is a prism. T = {v,e,f}:
4
5
c
h
E
g
6
d
C i
D
3
e
b
f
B
1
a
A
2
• J = {v,e}
• Flags:
1a,1d,1e,2a,2b,2f,3e,3f,3i,4c,4d,4h,5b,5c,5g,6g,6h,6i
• Sets: 1a,1d,1e,2a,2b,2f,3e,3f,3i,4c,4d,4h,5b,5c,5g,6g,6h,6i
• ...
Posets
• Let (P,·) be a poset. We assume that we add
two special (called trivial) elements, 0, and
1, such that for each x 2 P, we have 0 · x · 1.
Ranked Posets
• Note that a ranked poset (P,·) of rank n has the property
that there exists a rank function r:P ! {-1,0,1,...,n}, r(0) = 1, r(1) = n and if y covers x then r(y) = r(x) +1. (All linear
chains have the same length)
• If we are given a poset (P, ·) with rank function r, then such
a poset defines a natural incidence geometry.
• V(G) = P.
• x ~ y if and only if x < y.
• c(x) := r(x). Vertex color is just the rank.
• The corresponding geometry is a string geometry. There is
a one-to-one correspondence between the two concepts.
Intervals in Posets
• Let (P,·) be a poset.
• Then I(x,z) = {y| x · y · z} is called the
interval between x and z.
• Note that I(x,z) is empty if and only if x £ z.
• I(x,z) is also a ranked poset with 0 and 1.
Connected Posets.
• A ranked poset (P,·) wih 0 and 1 is called
connected, if either rank(P) = 1 or for any
two non-trivial elements x and y there exists
a sequence x = z0, z1, ..., zm = y, such that
there is a path avoiding 0 and 1 in the Levi
graph from x to y and the rank function is
changed by § 1 at each step of the path.
Abstract Polytopes
• Peter McMullen and Egon Schulte define abstract
polytopes as special ranked posets.
• Their definition is equivalent to the following:
• (P,·) is a ranked poset with 0 and 1 (minimal and maximal
element)
• For any two elements x and z, such that r(z) = r(x)+2, x < z
there exist exactly two elements y1, y2 such that x < y1 < z, x <
y2 < z.
• Each section is connected.
• Note that abstract poytopes are a special case of
posets but they form also a generalization of the
convex polytopes.
Convex vs abstract polytopes
• To each convex polytope we may associate an
abstract polytope. For instance, the
tetrahedron:
• 0
• 4 vertices: v1, v2, v3, v4.
• 6 edges: e1, e2, ..., e6,
• 4 faces: t1,t2,t3, t4
• 1
• e1 = v1v2, e2 = v1v3, e3 = v1v4, e4 = v2v3, e5 =
v2v4, e6 = v3v4.
• t4 = v1v2v3, t1 = v2v3v4, t3 = v1v2v4, t2 = v1v3v4.
The Poset
1
t1
e1
e2
t2
e3
t3
e4
t4
• In the Hasse diagram
we have the following
local picture:
e5
e6
v1 v2 v3
0
v4
Diagram geometries
• For any incidence geometry G(V,~,T,c) we usually
study for each pair i,j 2 T the section (truncation)
of rank two: G/(i,j). We deliberatly make
distinction between G/(i,j) and its dual G/(j,i).
Sometimes each connected component of G/(i,j)
has the same structure. This is indicated by a
diagram. A diagram in an edge-labeled graph on
the vertex set T, where the lables indicate the
structure of each section.
String diagram geometries
• The edge between i an j is omitted if and
only if G/(i,j) is a generalized digon. This
means that each connected component is a
complete bipartite graph.
• G is called a string diagram geometry if
the corresponding diagram has a shape of a
path (or union of paths).
• Example: Each abstract polytope is a string
diagram geometry.
The Grassmann graph
• Let G(V,~,T,c) be an incidence geometry and let i
2 T be a type. Then we define the Grassmann
graph G(i) to on the vertex set V(i) = {v 2 V| c(v)
= i} and two vertices u and v are adjacent in G(i)
if an only if for each j i there exists an w 2 V(j)
such that u ~ w and w ~ v (in the original
geometry.)
• Example: For instance, in the case of rank two
geometries, the Grassmann graphs are exactly the
Menger graph and the dual Menger graph.
Exercises 4-1
4
5
c
h
E
g
6
d
C i
D
3
e
b
f
B
1
a
A
2
• N1. Our map is a prism. I
= {v,e,f}:
• For each set of type
• J = {v,f}
• J = {e,f}
• J = {v,e,f}
determine the shadow space.
Exercises 4-2
• N2. Repeat the analysis of previous two
slides for the simplex K5.
• N3. Repeat the analysis of the previous two
slides for the generalized octahedron K2,2,2,2.
Exercises 4-3
• N4: Determine all residual geometries of Reye’s
configuration
• N5: Determine all residual geometries of Q4.
• N6: Determine all residual geometries of the
Platonic solids.
• N7: Determine the Levi graph of the geometry for
the group Z2 £ Z2 £ Z2, with three cyclic
subgroups, generated by 100, 010, 001,
respectively.
Exercises 4-4
• N18: Determine the posets and Levi graphs
of each of the polytopes on the left.
• Solution for the haxagonal pyramid:
• 0
• 7 vertices: v0, v1, v2, ..., v6.
• 12 edges: e1, e2, ..., e6, f1, f2, ..., f6
• 7 faces: h,t1,t2,t3,.., t6
• 1
• e1 = v1v2, e2 = v2v3, e3 = v3v4, e4 = v4v5, e5 =
v5v6, e6 = v6v1, f1 = v1v0, f2 = v2v0,f3 = v3v0, f4
= v4v0, f5=v5v0, f6 = v6v0.
• h = v1v2v3v4v5v6,
• t1 = v1v2v0, t2 = v2v3v0, t3 = v3v4v0, t4 = v4v5v0,
t5 = v5v6v0, t6 = v6v1v0,
5. Incidence Structures
Incidence structure
• An incidence structure C is a triple
– C = (P,L,I) where
• P is the set of points,
• L is the set of blocks or lines
– I P L is an incidence relation.
– Elements from I are called flags.
• The bipartite incidence graph G(C) with black
vertices P, white vertices L and edges I is known
as the Levi graph of the structure C.
(Combinatorial) Configuration
• A (vr,bk) configuration is an incidence structure C
= (P,L,I) of points and lines, such that
•
•
•
•
•
v = |P|
b = |L|
Each point lies on r lines.
Each line contains k points.
Two lines intersect in at most one point.
• Warning: Levi graph is semiregular of girth 6
Symmetric configurations
• A (vr,bk) configuration is symmetric, if
• v = b (this is equivalent to r = k).
• A (vk,vk) configuration is usually denoted by (vk).
Small Configurations
• Triangle, the only (32)
configuration.
• Pasch configuration
(62,43) and its dual
Perfect Quadrangle
(43,62) have the same
Levi graph.
6. Substructures, Symmetry and
Duality
Substructures
• An incidence structure C’ = (P’, L’,I’) is a
substructure of an incidence structure C =
(P, L,I), C’ µ C, if P’ µ P, L’ µ L and I’ µ I.
Duality
Each incidence structure C = (P,L,I) gives
rise to a dual structure Cd = (L,P,Id) with
the role of points and lines reversed and
keeping the incidence.
• The structures C and Cd share the same Levi
graph with the roles of black and white
vertices reversed.
Self-Duality and Automorphisms
• If C is isomorphic to its dual Cd , it is said that C
is selfdual, the corresponding isomorphism is
called a (combinatorial) duality.
• A duality of order 2 is called (combinatorial)
polarity.
• An isomorphism mapping C to itself is called an
automorphism or (combinatorial) collinearity.
Automorphisms and
Antiautomorphisms
• Automorphisms of the incidence structure C form a grup
that is called the group of automorphisms and is denoted
by Aut0C.
• If automorphisms and dualities (antiautomorphisms) are
considered together as permutations, acting on the disjoint
union P L, we obtain the extended group of
automorphism Aut C.
• Warning: If C is disconnected there may be mixed
automorphisms.
Graphs and Configurations
• The Levi graph of a configuration is bipartite and
carries complete information about the
configuration.
• Assume that C is connected. The extended group
of automorphisms AutC coincides with the group
of automorphisms of the Levi graph L ignoring the
vertex coloring, while Aut0C stabilises both
colors.
Examples
• 1. Each graph G = (V,E) is an incidence structure:
P = V, L = E, (x,e) 2 I if and only if x is an
endvertex of e.
• 2. Any family of sets F µ P(X) is an incidence
structure. P = X, L = F, I = 2.
• 3. A line arrangement L = {l1, l2, ..., ln} consisting
of a finite number of n distinct lines in the
Euclidean plane E2 defines an incidence structure.
Let V denote the set of points from E2 that are
contained in at least two lines from L. Then: P = V,
L = L and I is the point-line incidence in E2.
Exercises 6
• N1: Draw the Levi graph of the incidence
structure defined by the complete bipartite graph
K3,3.
• N2: Draw the Levi graph of the incidence
structure defined by the powerset P({a,b,c}).
• N3: Determine the Levi graph of the incidence
structure, defined by an arrangemnet of three lines
forming a triangle in E2.
7. Haar Graphs and Cyclic
Configurations
Haar graph of a natural number
Let us write n in binary:
n = bk-12k-1 + bk-2 2k-2 + ...+ b12 + b0
where B(n) = (bk-1, bk-2, ..., b1, b0), bk-1= 1are binary
digits of n. Graph H(n) = H(k; n), called the Haar
graph of the natural number n, has vertex set
ui, vi, i=0,1,...,k-1. Vertex ui is adjacent to vi+j, if
and only if bj = 1 (arithmetic is mod k).
Remark
When defininig H(n) we assumed that k is the
number of binary digits of n. In general, for
H(k;n) one can take k to be greater than the
number of binary digits. In such a case a
different graph is obtained!
Example
Determine H(37).
Binary digits:
• B(37) = {1,0,0,1,0,1}
• k = 6.
• H(37) = H(6;37) is
depicted on the left!
Dipoles qn
• The dipole qn has two vertices,
joined by n parallel edges. If we
want to distinguish the two
vertices, we call one black, the
other one white. On the left we
see q5.
• Each dipole is a bipartite graph.
Therefore each of its covering
graphs is a bipartite graph.
• In particular q3 is a cubic graph
also known as the theta graph
q.
Cyclic covers over a dipole
0 3 5
Z6
• Each Haar graph is a cyclic cover
over a dipole. One can use the
following recipe:
• H(37) is determined by a natural
number 37, or, equivalently by a
binary sequence:(1 0 0 1 0 1).
• The length is k=6, therefore the
group Z6.
• The indices are written below:
• (1 0 0 1 0 1)
• (0 1 2 3 4 5)
• The “1”s appear in positions: 0, 3 in
5. These numbers are used as
voltages for H(37).
Connected Haar graphs
• Graph G is connected if there is a path between
any two of its vertices.
• There exist disconnected Haar graphs, for instance
H(10).
• Define n to be connected, if the corresponding
Haar graph H(n) is connected.
• Disconnected numbers:
2,4,8,10,16,32,34,36,40,42,64...
The Mark Watkins Graph
• The cubic Haar graph
H(536870930) has an
interesting property.
536870930 is the smallest
connected number that is
cyclically equivalent to no
odd number.
• Recall that two sets S,T µ
Zn are cyclically
equivalent if there exists a
2 Zn* and b 2 Zn such that
S = aT + b (mod n).
Girth of Connected Haar graphs
• K2 is the only connected 1-valent Haar
graph.
• Even cycles C2n are connected 2-valent
Haar graphs.
• Theorem: Let H be a connected Haar
graph of valence d > 2. Then either girth(H)
= 4 or girth(H) = 6.
Cyclic Configurations
k
k+1
k+3
a b c d
1 2 3 4
e
5
f g
6 0
2 3 4 5
4 5 6 0
6
1
0 1
2 3
• A symmetric (vr)
configuration determined by
its first column s of the
configuration table where
each additional column is
obtained from s by addition
(mod m) is called a cyclic
configuration Cyc(m;s).
• The left figure depicts a
cyclic Fano configuration
Cyc(7;1,2,4) = Cyc(7;0,1,3).
Connection to Haar graphs
• Theorem: A symmetric configuration (vr), r ¸ 1 is
cyclic, if and only if its Levi graph is a Haar graph
with girth 4.
• Corollary: Each cyclic configuration is pointand line-transitive and combinatorially self-dual.
• Corollary: Each cyclic configuration (vr), r > 2
contains a triangle.
• Question: Does there exist a cyclic configuration
that is not combinatorially self-polar?
Problem
• Study cyclic
configurations with
respect to flag orbits.
• Example: On the left we
see the smallest 0symmetric graph
Haar(261) on 18 vertices.
It is the Levi graph of the
cyclic (93) configuration
having 3 flag orbits.
Exercises 7-1
• The graph on the left is the
so-called Heawood graph
H. Prove:
– N1: H is bipartite
– N2: H is a Haar graph.
(Find n!)
– N3: Determine H as a cyclic
cover over q3..
– N4: Prove that H has no
cycle of length < 6.
– N5: Prove that H is the
smallest cubic graph of
girth 6.
– N6: Find a hexagonal torus
embedding of H .
– N7: Determine the dual of
the embedded H.
Exercises 7-2
• N8: Prove that each 2m is a disconnected number.
• N9: Show that the Möbius-Kantor graph G(8,3) is
a Haar graph of some number. Which number is
that?
• N10: (*) Determine all generalized Petersen
graphs that are Haar graphs of some natural
number.
• N11: Show that some Haar graphs are circulants.
• N12: Show that some Haar graphs are noncirculants.
Exercises 7-3
• N13: Prove that each
Haar graph is vertex
transitive.
• N14: Prove that each Haar
graph is a Cayley graph
for a dihedral group.
• N15: Prove that there exist
bipartite Cayley graphs of
dihedral groups that are
not Haar graphs (such as
the graph on the left).
Exercises 7-4
• N16: The numbers n and m are cyclically equivalent, if
the binary string of the first number can be cyclically
transformed to the binary string of the second number.
This means that the string can be cyclically permuted,
mirrored or multiplied by a number relatively prime with
the string length.
• N17: The numbers n and m are Haar equivalent, if their
Haar graphs are isomorphic: H(n) = H(m).
• N18: Prove that cyclic equivalence implies Haar
equivalence.
• N19: Determine all numbers that are cyclically equivalent
to 69.
• N20: Use a computer to show that 137331 and 143559 are
Haar equivalent, but are not cyclically equivalent.
Exercises 7-5
• N21: Show that each Haar graph of an odd
number H(2n+1) is hamiltonian and
therefore connected.
Homework 7
• Use Vega to explore the edge-orbits of
cyclic Haar graphs.
• H1. Find an example of a cubic Haar graph
that has 1,2, or 3 edge orbits.
• H2. Find an example of a quartic Haar
graph that has 1, 2, 3, or 4 edge orbits.
Study the graphs with 2 edge orbits.
8. Algebraic Structures
Real Numbers R.
• Let us review the structure of the set of real
numbers (real line) R.
• In particular, consider addition + and
multiplication £.
• (R,+) forms an abelian group.
• (R,£) does not form a group. Why?
• (R,+,£) forms a (commutative) field.
Real Numbers R. - Exercises
• N43: Write down the axioms for a group, abelian
group, a ring and a field.
• N44: What algebraic structure is associated with
the integers (Z,+,£)?
• N45: Draw a line and represent the numbers R.
Mark 0, 1, 2, -1, ½, p.
A Skew Field K
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
A skew field is a set K endowed with two constants 0 and 1, two unary operations
-: K ! K,
‘: K ! K,
and with two binary operations:
+: K £ K ! K,
: K £ K ! K,
satisfying the following axioms:
(x + y) + z = x + (y +z) [associativity]
x + 0 = 0 + x = x [neutral element]
x + (-x) = 0 [inverse]
x + y = y + x [commutativity]
(x y) z = x (y z). [associativity]
(x 1) = (1 x) = x [unit]
(x x’) = (x’ x) = 1, for x 0. [inverse]
(x + y) z = x z + y z. [left distributivity]
x (y + z) = x y + y z. [right distributivity]
A (commutative) field satisfies also:
x y = y x.
Examples of fields and skew
fields
•
•
•
•
Reals R
Rational numbers Q
Complex numbers C
Quaterions H (non-commutative!! Will consider
briefly later!)
• Residues mod prime p: Fp
• Residues mod prime power q = pk: Fq (more
complicated, need irreducible poynomials!!Will
consider briefly later!)
Complex numbers C
a = a + bi 2 C
a* = a – bi
b = c + di 2 C
ab = (ac –bd) + (bc + ad)i
b 0, a/b = [(ac + bd) + (bc – ad)i]/[c2 +
d 2]
• a-1 = (a –bi)/(a2 + b2)
•
•
•
•
•
Quaternions H.
•
•
•
•
Quaternions form a non-commutative field.
General form:
q = x + y i + z j + w k., x,y,z,w 2 R.
i 2 = j 2 = k 2 =-1.
• q = x + y i + z j + w k.
• q’ = x’ + y’ i + z’ j + w’ k.
• q + q’ = (x + x’) + (y + y’) i + (z + z’) j + (w + w’) k.
• How to define q .q’ ?
• i.j = k, j.k = i, k.i = j, j.i = -k, k.j = -i, i.k = -j.
• q.q’ = (x + y i + z j + w k)(x’ + y’ i + z’ j + w’ k)
Quaternions H. - Exercises
• N46: There is only one way to complete the definition
of multiplication and respect distributivity!
• N47: Represent quaternions by complex matrices (matrix
addition and matrix multiplication)! Hint: q = [a b; -b*
a*]. (We are using Matlab notation).
a
b
-b*
a*
Residues mod n: Zn.
•
•
•
•
•
•
Two views:
Zn = {0,1,..,n-1}
Define ~ on Z:
x ~ y $ x = y + cn
Zn = Z/~
(Zn,+) is an abelian group, namely a cyclic
group. Here + is taken mod n!!!
Example (Z6, +).
+ 0 1 2 3 4 5
0 0 1 2 3 4 5
1 1
2
3
4
5
0
2 2
3
4
5
0
1
3 3
4
5
0
1
2
4 4
5
0
1
2
3
5 5
0
1
2
3
4
Example (Z6, £).
£ 0 1 2 3 4 5
0 0 0 0 0 0 0
1 0
1
2
3
4
5
2 0
2
4
0
2
4
3 0
3
0
3
0
3
4 0
4
2
0
4
2
5 0
5
4
3
2
4
Example (Z6\{0}, £).
It is not a group!!!
For p prime, (Zp\{0}, £) forms a group: (Zp, +,£) = Fp.
£ 1
1 1
2
2
3
3
4
4
5
5
2 2
4
0
2
4
3 3
0
3
0
3
4 4
2
0
4
2
5 5
4
3
2
4
Vector space V over a field K
•
•
•
•
•
•
•
+: V £ V ! V (vector addition)
.: K £ V ! V (scalar multiple)
(V,+) abelian group
(l + m)x = l x + m x
1.x = x
(l m).x = l(m x)
l.(x +y) = l.x + l.y
9. Euclidean Plane, Affine Plane,
Projective Plane
Euclidean plane E2 and real plane
R2
• R2 = {(x,y)| x,y 2 R}
• R2 is a vector space over R. The elements
of R2 are ordered pairs of reals.
• (x,y) + (x’,y’) = (x+x’,y+y’)
• l(x,y) = (l x,l y)
• We may visualize R2 as an Euclidean plane
(with the origin O).
Subspaces
y = ax + b
o
• One-dimensional
(vector) subspaces are
y = ax
lines through the
origin. (y = ax)
• One-dimensional
affine subspaces are
lines. (y = ax + b)
Three important results
• Thm1: Through any pair of distinct points passes
exactly one affine line.
• Thm2: Through any point P there is exactly one
affine line l’ that is parallel to a given affine line l.
• Thm3: There are at least three points not on the
same affine line.
• Note: parallel = not intersecting or identical!
Affine Plane
• Axioms:
• A1: Through any pair of distinct points passes
exactly one line.
• A2: Through any point P there is exactly one line
l’ that is parallel to a given line l.
• A3: There are at least three points not on the same
line.
• Note: parallel = not intersecting or identical!
Examples
• Each affine plane is an incidence structure C
= (P,L,I) of points and lines.
• Let K be a field, then K2 has a structure of
an affine plane.
• K = Fp.
• Determine the number of points and lines in
the affine plane A2(p) = Fp2.
Parallel Lines
•
Parallel lines l || m define an equivalence
relation on the set of lines.
1. l || l
2. l || m ) m || l
3. l || m, m || n ) l || n.
A pencil of parallel lines
• An equivalence class
of parallel lines is
called a pencil of
parallel lines.
• Thm. Each pencil of
parallel lines defines
an equivalence
relation on the set of
lines.
Ideal points and Ideal line
• Each pencil of parallel
lines defines a new
point, called an ideal
point (or a point at
inifinity.) New point is
incident with each line
of the pencil.
• In addition we add a
new ideal line (or line
at infinity)
Extended Plane
• Let A be an arbitrary
affine plane. The
incidence structure
obtained from A by
adding ideal points
and ideal lines is
called the extended
plane and is denoted
by P(A).
• Theorem. Let C be an extended
plane obtained from any affine
plane. The following holds:
• T1. For any two distinct points P
and Q there exists a unique line l
connecting them.
• T2. For any two distinct lines l
and m there exists a unique point
P in their intersection.
• T3. There exist at least four
points P,Q,R,S such that no three
of them are colinear.
Projective Plane
• Axioms for the Projective Plane. Let C be an
incidence structure of points and lines that
satisfies the following axioms:
• P1. For any two distinct points P and Q there
exists a unique line l connecting them.
• P2. For any two distinct lines l and m there exists a
unique point P in their intersesction.
• P3. There exist at least four points P,Q,R,S such
that no three of them are colinear.
Linear Transformations
• In a vector space the important mappings
are linear transformations:
• L(l x + m y) = l L(x) + m L(y). L-1 exists.
• L can be represented by a nonsingular
square matrix.
Semi Linear Transformations
• A semi linear transformation is more
general:
• L(lx + m y) = f(l) L(x) + f(m) L(y). L-1
exists, f: K ! K is an automorphism of K.
Affine Transformations
• In an affine plane the important mappings
are affine transformations (=affinities).
• An affine transformation maps sets of
collinear points to collinear points.
• Each affine transformation is of the form
A(x) + c, where A is a semilinear
transformation.
Projective plane from R3
• Consider the incidence structure defined by
1-dimensional and 2-dimensional subspaces
of R3 where the incidence is defined by
inclusion.
• Call 1-dimensional subspaces points and 2dimensional subspaces lines.
Homogeneous Coordinates
• Let (a,b,c) (0,0,0) be a point in R3. There
is exactly one line through the origin
passing through (a,b,c). Hence a projective
point can be represented by (a,b,c).
However, for any l 0 the same projective
point can be represented by (l a, l b, l c).
• That is why (a,b,c) are called homogeneous
coordinates.
Unit sphere model
• Take a unit sphere in R3.
• Let pairs of antipodal points be projective
points.
• Let big circles be projective lines.
• Prove that this system is a model for a
projective plane.
Exercises 9-1
• N1. Conditions 1. and 2. are true for any
incidence structure. (Prove it!)
• N2: Prove condition 3 for affine planes and
find a counter-example for general
incidence structure.
• N3. Prove that this structure satisfies all
three axioms for the projective plane.
• N4: Prove that in R, Q, Fp, (p- prime) there
are no nontrivial automorphisms.
Exercises 9-2
• N5: Prove that z a z* (conjugate) is an
automorphism of C.
• N6: Go to the library or the internet and find a
reference to the group of authomorphisms of the
complex numbers C and the quaternions H.
• N7: Determine the size of the group of
automorphisms of Fq, for q = pk, a power of a
prime.
10. Point Configurations, Line
Arrangements, Polarity
Point Configuration
• A point configuration
in R2 is a collection of
points affinely
spanning R2.
• In other words: not all
points are collinear.
Line Arrangement
• A line arrangement is
a partitioning of the
plane R2 into
connected regions
(cells, edges, and
vertices) induced by a
finite set of lines.
Area of a Triangle
Area of the green
trapezoid:
P2(x2,y2)
y2
A12= (1/2)(y2 +y1) (x2 – x1)
In the same way:
y1
y3 P1(x1,y1)
O
x1
x2
A23= (1/2)(y2 +y3) (x3 – x2)
A13= (1/2)(y3 +y1) (x3 – x1)
P3(x3,y3)
Area of the triangle:
T = A12 + A23 – A13.
x
3
Area of a Triangle
P2(x2,y2)
y2
y1
y3 P1(x1,y1)
O
x1
P3(x3,y3)
x2
x3
Triple of Collinear Points
P2(x2,y2)
y2
y1
y3 P1(x1,y1)
O
x1
P3(x3,y3)
x2
x3
The points P1(x1,y1), P2(x2,y2), P3(x3,y3), are
collinear if and only if T = 0.
Point Configurations – Line
Arrangements
• Each point configuration S gives rise to a
line arrangement A(S). The lines are
determined by all pairs of points.
• Another line arrangement A3(S) is
determined by triples of collinear points.
Polarity with Respect to a Circle
p
P
P
p
P
p
• Let us consider the
extended plane and a
circle K in it. There is a
mapping from points to
lines (and vice versa).
p: p a P.
• p – polar
• P – pole
Polarity with respect to the unit
circle
•
•
•
•
•
•
•
•
•
•
•
•
•
Given P(a,b) the equation of the polar is
p: y = (-a/b)x + (1/b)
p: by + ax = 1
In general: Circle K(p,q;r)
p: y(b-q) + x(a-p) = p(a-p) + q(b-q) + r2.
Given
p: y = kx + n
P(a,b)
a = -k/n
b = 1/n
In general:
a = p-kr2/(kp + n – q)
b = q+ r2/(kp + n –q)
Natural Parameters p,q,r
• For a given point
configuration S the
center of the
circle(p,q) is
determined as the
barycenter of S while
the radius is given as
the average distance
from the center.
Polarity in General
• A general polarity is
defined with respect to
a conic section
(ellipse, hyperbola, or
parabola).
Polar Duality of Vectors and
Central Planes in R3.
• A polar duality is a
mapping associating a
vector v 2 R3 with an
oriented central plane
having v as its normal
vector and vice versa.
A Standard Affine Polar-Duality
• A standard affine polar
duality is a mapping
between non-vertical
lines and points of R2
associating the nonvertical line y = ax + b
with the point (a,-b)
and vice versa.
Polar Duality of Points and Lines
in the Affine Space.
• General rule: Take a
polar-duality of
vectors and central
planes and consider
the intersetion with
some affine plane in
R3 .
Homogeneous Coordinates
• Take the affine plane z
= 1. A point with
Euclidean coordinates
(x,y) can be assigned
the homogeneous
coordinates (x,y,1).
Ideal points get
homogeneous
coordinates (x,y,0).
(z0x0,z0y0,z0)
(x0,y0,1)
(x0,y0)
Equation of a plane through the
origin
• Recall general plane:
• ax + by + cz = d.
• Equation of a plane through the origin:
• ax + by + cz = 0-
• Another meaning:
• (x,y,z) homogeneous coordinates of a projective
point
• [a,b,c] homogeneous coordinates of a projective
line.
Point on a Line
• Let P(a,b,c) and
• Let (a,b,c) be
P’(a’,b’,c’). The
homogeneous
equation of a line
coordinates of a point
through P Æ P’. is
P and let [A,B,C] be
defined by the cross
homogeneous
product [A,B,C] =
coordinates of a line p.
(a,b,c) £ (a’,b’,c’).
• Then P lies on p if and • Similarly we get the
only if aA + bB + cC =
intersection of two
0.
lines.
Example
• Polarity of a point
configuration
consisting of the
points of a 10 £ 10
grid.
• Parameters of the
circle are determined
automatically.
Star Polygons (n/k).
3/1
4/1
5/1
5/2
6/1
6/2
7/1
7/2
7/3
• By (n/k) we denote
star polygons.
• Note that each of them
defines an incidence
structure. in which the
points are the vertices
and intersections while
the lines are the edges
of a polygon.
Fano Plane
0 0 1 0 1 1 1
0 1 0 1 0 1 1
1 0 0 1 1 0 1
• We obtain the Fano
plane from F23. There
are obviously 7 (nonzero) points: Any pair
of points defines a
unique line that
contians exactly one
additional point.
Exercises 10-1
• A polarity maps a point configuration to a line
arrangement and vice versa.
• N1:Take an equilateral triangle ABC with sides
a,b,c. Find a polarity, such that a a A, b a B and
c a C.
• N2: Determine the polar figure of point
configuration determined by the vertices of a
regular n-gon with respect to its inscribed circle.
• N3: Determine the polar of an ideal point and the
pole of the ideal line.
Exercises 10-2
• N4: Determine the number of points and
lines of the incidence structure defined by
the star polygon 5/2.
• N5(*): Determine the number of points and
lines of the incidence structure determined
by the star polygon n/k.
Homework 10
• H1: Prove that the number of points on each
line of any finite projective plane P is
constant, say q+1. [Then q is called the
order of P.]
• H2: Which axioms of a projective planes
are valid for a near-pencil N(n)?
11. Pappus and Desargues Theorem
Pappus Theorem
C
B
A
C''
A'
B''
B'
A''
C'
• Let A, B, C be three collinear
points and let A', B' , C' be
another triple of collinear
points. Let A'' be the
intersection of (BC') and (B'C),
B'' the intersection (A,C') and
(A'C), C'' the intersetion of
(AB') and (A'B). Then the
points A'', B'' and C'' are
collinear.
Desargues Theorem
B''
B'
C''
A'
A
O
B
C
C'
A''
• Let ABC and A'B'C' be two
triangles. Let A'' be the
intersection of BC and B'C',
let B'' be the intersection of
AC and A'C' and C'' be the
intersection of AB and A'B'.
The lines AA',BB' and CC'
intersect in a common point O
if and only if A'', B'' and C''
are collinear.
Ternary ring coordinatization.
[b]
[0,a*b*c]
[b]
[0,c]
[0,b]
[0,0]
[1,b]
[1,0]
[a,0]
• Ternary operation, desrcibed in
geometric terms.
• Properties:
• (a) x*0*b = 0*x*b=b
• (b)x*1*0 = 1 * x * 0 = x
• (c) Given x,y,a, there is a unique
b such that y = x*a*b
• (d) Given x,x’,y,y’ with x x’
there is a unique ordered pair
(a,b) such that y = x*a*b and
y’=x’*a*b.
• (e) Given a,a’,b,b’ with a a’,
there is a unique x such that
x*a*b=x*a’*b’.
Pappian and Desarguesian
Projective Planes
• Thm. A projective plane is desarguesian if
and only if the ternary ring is a field or a
sqew-field.
• Thm. A projective plane is pappian if an
only if the ternary ring is a field.
Non-Desarguesian Projective
Plane
• F.R.Multon (1902)
• Points: points in the real
projective plane.
• Lines:
• y = mx+n, m· 0.
• y = mx + n, x¸(-n/m), m¸0
• y = (m/2)x + n), m¸0,y·0.
• Line at infinity contains
points [m].
Exercises 11
• N1(*): Prove the Pappus theorem in the
Euclidean plane.
• N2(*): Prove the Desargues theorem in the
Eucliudean plane.
12. Existence and Counting of
Combinatorial Configurations
Lineal Configurations
• In order to emphasise configurations as
partial linear spaces we call them lineal
configurations (= digon – free
configurations).
Existence of Lineal
Configurations
• Proposition: For each lineal (vr,bk) configuration
(r ¸ k) the following is true:
• v.r = b.k
• b ¸ v ¸ 1 + r(k – 1)
• Corollary: For symmetric (vk) configurations the
following lower bound is obtained:
• v ¸ 1 + k(k-1) = 1 –k + k2
• In particular:
• For k = 3 we have v ¸ 7,
• For k = 4 we have v ¸ 13,
• For k = 5 we have v ¸ 21.
Lower Bounds (Adapted from
Grünbaum)
r\k
3
4
5
6
7
3
(73)
(123,94)
(203,125)
(263,136)
(353,157)
4
(94,123)
(134)
(204,165)
?(304,206)?
?(494,,287)?
5
(125,203
)
(165,204)
(215)
(305,256)
?(425,307)?
6
(136,263
)
?(206,304)?
(256,305)
(316)
X(496,427)
X
7
(157,353
)
?(287,494)?
?(307,425)?
X(427,496)
X
X(437)X
Blocking Set
• A set of points B of an incidence structure is
called a blocking set, if each line L
contains two points x and y, such that:
• x 2 B and (x,L) 2 I,
• y B and (y,L) 2 I.
Notation
Counting (v3) Configurations
Counting Triangle-Free (v3)
Configurations
13. Coordinatization
Coordinatization
Reconstruct an incidence structure from a matrix M:
• Columns are homogeneous coordinates in some field or
sqew-field F.
• <ijk> = det (Mi Mj Mk)
• ijk form a line if and only if <ijk> = 0.
m11 m12 ... ... ... ... m1n
m21 m22 ... ... ... ... m2n
m31 m32 ... ... ... ... m3n
Fano plane (73).
• We can reconstruct (73) from
the matrix M.
• Columns are homogeneous
coordinates in F2.
• <ijk> = det (Mi Mj Mk)
• ijk form a line if and only if
<ijk> = 0.
0 0 0 1 1
0 1 1 0 0
1 0 1 0 1
1 1
1 1
0 1
Möbius-Kantor Configuration –
Revisited
• Möbius-Kantor configuration
is the only (83) configuration.
Its Levi graph is the
generalized Petersen graph
G(8,3).
• The configuration has no
geometric realization with
(real) points and lines in the
Euclidean plane.
Affine plane of order 3
1
2
3
4
5
6
7
8
9
• (94,123)
configuration is
the affine plane of
order 3.
• It contains the
Pappus
configuration.
• It contains also the
Möbius-Kantor
configuration.
Complex Coordinatization of
(94,123)
A Z3 coordinatization of (134) = PG(2,3)
A Z3 coordinatization of (123, 94)
• By removing one point from the projective
plane we get the affine plane. (Its dual is
(94,123))
Dual coordinates and dual lines
0 0 0 1
0 1 1 0
1 0 1 0
1
0
1
1 1
1 1
0 1
1
1
1
1
1
1
1 1 1 1 2 2 2 3 3 3 4 5
2 4 6 7 4 5 7 4 5 6 8 6
3 5 9 8 6 8 9 7 9 8 9 7
Möbius-Kantor Configuration –
Revisited
0 -1 1 0 a 1 0 1
1 0 -1 1 0 a a 0
-1 1 0 a 1 0 1 a
• Möbius-Kantor
configuration is
coordinatizable over the
complex field and over
F3.
•
0 -1 1 0 a 1 0 1
1 0 -1 1 0 a a 0
-1 1 0 a 1 0 1 a
Something is wrong here. I
expected that one can change
• -1 ! 2
• a!2
•
in the top matrix, and get the
desired coordinatization. But
columns 1 and 4 become identical.
Complex Coordinatization of (83)
• By removing one point (and 4 incident
lines) we get (83) from (94,124).
Exercises 13-1
• N1: Determine the homogeneous
coordinates of the 9 lines from the
previous problem.
• N2: Write a computer program that
will find the matrix for the polar.
• N3:Show that by deleting any
column of the matrix for (94,123) a
coordinatization of (83) is obtained.
• N4: Given the Levi graph G(8,3) of
(83), determine the Levi graph of
(94,123).
Exercises 13-2
• N5: Determine
whether the incidence
structure defined by 9
points and 8 lines on
the left has a blocking
set.
• N6: Prove that the
game TIC-TAC-TOE
has no possibility of a
draw.
14. Combinatorial Configurations on
Surfaces
Menger Graph on Torus
• On the left there is a
hexagonal embedding
of the Heawood graph
in the torus. (Heawood
= Levi graph of Fano)
• Its dual is a triangular
embedding of K7 in
S2.
Menger Graph on Torus
• Menger graph (of
Fano) is K7 and has a
triangular embedding
in torus. (Consider
only red vertices).
• Later we show how to
generalize this
construction.
Menger graph of Möbius-Kantor
Configuration
• Menger graph of this
configuration is depleated K8:
DK8 = K8 – 4K2
• Vertices represent
configuration points while
triangles represent lines.
Möbius-Kantor Graph in Double Torus
The Möbius-Kantor
graph is embedded in
the double torus such
that:
• The embedding is
octagonal.
• The map is regular.
Möbius-Kantor Graph in Double Torus
• This embedding of the
Möbius-Kantor graph
gives rise to an embedding
of the Menger graph DK8
in the same surface with 8
triangles and 6
quadrilaterals.
• By adding 4 missing
edges we get an
embedding of K8 in the
double torus with all
triangles, except for two
quadrilaterals.
The Dual
• The dual graph is
S[2](K4).
• Let G be any graph.
Recall that S(G) is the
subdivision graph.
• S[k](G) is obtained
from S(G) by
multiplying the
original vertices of G
k times.
Pappus configuration
• Pappus (93) configuration can
be represented in the plane by
exhibiting homogeneous
coordinates for each point
(a,b,c). Each line can be
described in a similar way:
[p,q,r] where the incidence is
given by ap+bq+cr=0.
• This can be considered as an
example of an orthogonal
representation of (Levi) graphs
where u~v implies r(u) ^ r(v).
Pappus Graph on Torus
•
Collection of hexagons:
1.
2.
3.
4.
5.
6.
7.
8.
9.
•
•
•
{10, 17, 18, 13, 12, 11}
{8, 15, 16, 17, 10, 9}
{7,12, 13, 14, 15, 8}
{4, 11, 12, 7, 6, 5}
{3,4, 5, 16, 15, 14}
{2, 9, 10, 11, 4, 3}
{1, 2, 3, 14, 13, 18}
{1, 18, 17, 16, 5, 6}
{1, 6, 7, 8, 9, 2}
Euler formula:
18 - 27 + 9 = 0
g=1
Three (93) Configurations
Three (93) Configurations
• They are all
combinatorially selfpolar.
• Pappus (red)
• Cyclic (green)
• Non-cyclic (yellow?).
Three (93) Configurations
•
List of faces:
1.
2.
3.
4.
5.
6.
7.
•
•
•
{5, 11, 14, 7, 15, 16, 12, 6}
{4, 10, 18, 17, 11, 5}
{3, 9, 17, 18, 12, 16, 8, 13, 10, 4}
{2, 8, 16, 15, 9, 3}
{1, 2, 3, 4, 5, 6}
{1, 6, 12, 18, 10, 13, 14, 11, 17, 9, 15, 7}
{1, 7, 14, 13, 8, 2}
Euler formula: V = 18, E = 27, F = 7
18 - 27 + 7 = -2 = 2 - 2g.
g=2
Three (93) Configurations
•
List of faces:
1.
2.
3.
4.
5.
6.
7.
8.
9.
•
{10, 16, 15, 11, 17, 18}
{8, 18, 17, 9, 14, 13}
{7, 15, 16, 12, 13, 14}
{4, 5, 6, 12, 16, 10}
{3, 9, 17, 11, 5, 4}
{2, 3, 4, 10, 18, 8}
{1, 2, 8, 13, 12, 6}
{1, 6, 5, 11, 15, 7}
{1, 7, 14, 9, 3, 2}
g = 1.
Menger and Levi - Pappus
Menger and Levi – Non-Cyclic
Menger and Levi - Cyclic
Again - Shaken (coordinates
slightly perturbed)
Menger and Its Complement
of G(10,3)
Genus of G(10,3) is 2.
•
List of faces:
1.
2.
3.
4.
5.
6.
7.
8.
{6, 7, 17, 20, 13, 16}
{5, 6, 16, 19, 12, 15}
{4, 5, 15, 18, 11, 14}
{3, 13, 20, 10, 9, 8, 7, 6, 5, 4}
{2, 3, 4, 14, 17, 7, 8, 18, 15, 12}
{1, 2, 12, 19, 9, 10}
{1, 10, 20, 17, 14, 11}
{1, 11, 18, 8, 9, 19, 16, 13, 3, 2}
•
•
•
Euler formula: V - E + F = 2 - 2g.
20 - 30 + 8 = -2 = 2 - 2g.
g = 2.
Clebsch hexagon
Clebsch hexagon – revisited
4
7
15
12
5
8
3
16
2
1
11
14
9
6
10
13
Clebsch graph
Hypercube Q4
Clebsch graph – revisited
• Connection to
hypercube?
Exercises 14
• N1: Show that each (93) configuration is
combinatorially self-polar.
• N2: Determine the groups of automorphisms and
extended automorphisms.
• N3: Show that the genus of two configurations is 1
while the genus of the third one is 2. Make
models!
• N4: Determine the three Menger graphs and their
duals on the minimal surfaces.
• N5: Prove that the complements of the three
Menger graphs are respectively C9, C6 [ C3, 3C3.
15. Generalized Polygons
Generalized Polygons
• A generalized polygon
is a bipartite graph of
diameter d and girth
2d.
• (From Godsil and
Royle)
• Any Km,n is a
generalized 2-gon.
Near-Pencil
• N(n) is a near-pencil
(or degenerate
projective plane) with
n+1 points and n+1
lines with the
incidence shown on
the left.
N(4)
Projective Space PG(3,q)
• Let V = Fq4 be the
• There are (q4 – 1)/(q-1) = (q +
four-dimensional
1)(q2 + 1) projective points in
vector space over the
PG(3,q).
field of order q and let
PG(3,q) be the
corresponding
projective space.
The Matrix H
• The matrix H 2 Fq4 £ Fq4 is defined below.
Totally Isotropic Subspace S of V.
• A subspace S ½ V is totally isotropic if
uT H v = 0 for all u,v 2 S.
• Each one-dimensional subspace S is totally
isotropic: uT H u = 0.
• A two-dimensional subspace S, spanned by
u and v: S = span{u,v} is totally isotropic if
and only if uT H v = 0.
?
u.
• For u 0 define u? = {v 2 V| uT H v = 0}.
• Note that u? is a 3-dimensional subspace of V,
containing u, that is orthogonal to HTu.
• In order to count the number of totally isotropic 2dimensional subspaces of V, we proceed as follows:
• There are q4 – 1 non-zero vectors u 2 V. There are q3-q
vectors v 2 u? – span{u}. Hence there are (q4 – 1)(q3 –
q) pairs of vectors.
• Each 2-dimensional subspace is spanned by (q2-1)(q2-q)
pairs, hence the number of totally isotropic 2dimensional subspaces of V is given by:
(q4 – 1)(q3 – q)/[(q2 –1)(q2 – q)] = (q2 + 1)(q + 1).
W(q)
• W(q) is the incidence structure of all totally
isotropic points and totally isotropic lines in
PG(3,q). It is a ((q2 + 1)(q + 1)q+1)
configuration.
Generalized Quadrangle
p
• A generalized quadrangle
is a partial linear space
satisfying the following
two conditions:
L
p’
• Given any line L and a
point p not on L there is a
unique point p’ on L such
that p and p’ are collinear.
• There are non-collinear
points and non-concurrent
lines.
Tutte’s 8-Cage
• In 1947 Tutte gave a
construction of the
only 8-cage on 30
vertices.
Tutte’s 8-Cage – Construction (I)
• Take S(Q3). There are
6 pairs of antipodal
new vertices of
valence 2. These 6
pairs are naturally
grouped into 3
quadruples – a
quadruple represents a
1-factor.
Tutte’s 8-Cage – Construction (II)
• The tree on the left has
6 pairs of leaves and
these 6 pairs are
naturally grouped into
3 quadruples.
Tutte’s 8-Cage – Construction (III)
• By gluing appropriately the
leaves of the tree on the left to
the midpoints of the edges of
the cube on the right one
obtains Tutte’s 8-Cage.
• Cubic graph
• Bipartite graph
• Girth 8
• Diameter 4.
Question
• Q. If we subdivide the
edges of K4 we may
attach the tree on the
left to it in such a way
that we avoid
quadrangles. What
graph is produced in
ths way?
Similar Question
• Same for the S(K2,2,2) and
the tree. First layer
antipodal edges, second
layer main squares of the
octahedron. Truncate
vertices of valence 4.
• (What about S(Q4)?)
4-dimensional Cube Q4.
0110
0010
0111
0011
1110
1010
1011
1111
0001
1101
1001
0000
0100
1000
1100
W(2) and Q4.
0110
0010
0111
0011
1110
1010
1011
1111
0001
1101
1001
0000
0100
1000
1100
• W(2) can be modelled
on the vector space F24
(represented as
hypercube).
• What are totally
isotropic points (lines
throug the origin) and
lines (planes through
the origin)?
W(2)
• W(2) is a (153) configuration. Its Levi graph
is Tutte’s 8-cage.
• W(2) admits geometric realization that is
known as the Cremona-Richmond
Configuration.
Cremona Richmond Configuration
• Cremona Richmond
Configuration can be
drawn by exhibiting
pentagonal cyclic
symmetry.
• It is the smallest
triangle-free (v3)
configuration.
Cremona-Richmond
Configuration in Space
• Take the following points related to tetrahedon.
•
•
•
•
4 vertices
6 midpoins of the edges.
4 centers of triangles
1 center of the tetrahedon
• The following lines:
• 4 x 3 = 12 triangle hights
• 3 lines connecting antipodal midpoints of edges and the center
• The resulting structure is the Cremona-Richmond
configuration.
Exercises 15-1
• N1: Prove that in PG(n,q) there are
(qn+1 – 1)(qn+1 – q) ... (qn + 1 – qp)/
[(qp+1 – 1)(qp+1- q) ... (qp+1 – qp)]
projective subspaces of dimension p.
Exercises 15-2
• N2: Study properties of W(3). By definition
it is a (404) triangle-free configuration.
What is its symmetry group?
• N3: Find one of its drawings.
• N4: Prove that the Levi graph of W(3) is
semi-symmetric (= regular, edge-transitive
but not vertex-transitive).
16. Cages and Configurations
The Balaban 10-cage
• The Balaban 10-cage is presented
on the left. This is one of the three
smallest cubic graphs of girth 10. It
has 70 vertices, a symmetry is
clearly visible.
• The cage has a Hamilton cycle. For
instance one of its LCF codes is
given here:
•
[-9, -25, -19, 29, 13, 35, -13, 29, 19, 25, 9, -29, 29, 17, 33, 21,
9, -13, -31, -9, 25, 17, 9, -31, 27,
-9, 17, -19, -29, 27, -17, -9, -29,
33, -25, 25, -21, 17, -17, 29, 35, 29, 17, -17, 21, -25, 25, -33, 29,
9, 17, -27, 29, 19, -17, 9, -27, 31,
-9, -17, -25, 9, 31, 13, -9, -21, 33, -17, -29, 29]
The other two 10-cages
• Besides the Balaban
cage there are two
more 10-cages. The
more symmetric one is
drawn here.
• LCF:
• [(-29, -19, -13, 13,
21, -27, 27, 33, -13,
13, 19, -21, -33,
29)5]
The third 10-cage
• The third 10-cage is the least
symmetric.
• LCF:
• [9, 25, 31, -17, 17, 33, 9,
-29, -15, -9, 9, 25, -25,
29, 17, -9, 9, -27, 35, -9,
9, -17, 21, 27, -29, -9, 25, 13, 19, -9, -33, -17,
19, -31, 27, 11, -25, 29, 33, 13, -13, 21, -29, -21,
25, 9, -11, -19, 29, 9, 27, -19, -13, -35, -9, 9,
17, 25, -9, 9, 27, -27, 21, 15, -9, 29, -29, 33, 9, -25].
10-cages
• All 10-cages are hamiltonian (see their
LCF description).
• Respective automorphism group orders:
• 80, 120, 24.
• Reference: T.Pisanski, M. Boben, D.
Marušič, A. Orbanič, A. Graovec: The 10cages and derived Configurations, Discrete
Math. 275 (2003), 265--276.
17. A Case Study – The Gray Graph
The Gray Graph G
• The smallest known cubic
edge- but not vertextransitive graph has 54
vertices and is known as
the Gray graph. It is
denoted by G.
• Since its girth is 8, it is the
Levi graph of two dual,
smallest, triangle-free,
point-, line- and flagtransitive, non-self-dual
(273)-configurations.
The Gray Configuration
• Cyclic drawings of
two dual Gray
configurations.
• These drawings show
the problem of a
straight-line
realizations of
configurations. They
both contain false
incidences.
Gray Configuration Revisited
• There is a much better
drawing of the Gray
configuration
available.
• Using this drawing it
becomes clear that the
Menger graph M of
the Gray configuration
is isomorphic to K3
K3 K3 .
Menger and Dual Menger Graph
• The representation of
the configuration in
the previous slide
determines the choice
between the Gray
configuration (and
Menger graph M =
K33) and the dual Gray
configuration and the
dual Menger graph D.
The genus of a graph
• Let g(G) denote the genus of the graph G.
This parameter denotes the least integer k,
such that G admits an embedding into an
orientable surface of genus k.
The Genus of K3 K3 K3
a
c
'
a
b
'
c
'
b
c
+
c
b
a
a
'
b
'
c
c
'
a
b
c
b
'
a
'
a
'
b
'
b
'
a
'
c
'
b
• Several years ago it
was shown that the
genus of g(K3 K3
K3 ) = 7. The genus
embedding was
constructed by Mohar,
Pisanski, Škoviera and
White. It is depicted in
the figure.
The Genus Embedding
• The genus embedding has some very nice
features.
– It contains a bipartite dual.
– If we color the faces in two colors all 27
triangles get a single color.
• This means that points of the Gray
configurations correspond to vertices while
the lines correspond to the triangles.
The Gray Graph admits an
embedding into a surface of
genus• If7we keep the original
vertices and introduce the
centers of triangles as new
vertices with an old vertex
v adjacent to a new vertex
t if and only if v lies on
the boundary of the
triangle t, the resulting
graph is the Gray graph.
• Hence the Gray graph fits
onto the same surface!
The Gray Graph admits an
embedding into a surface of
genus• If7we keep the original
vertices and introduce the
centers of triangles as new
vertices with an old vertex
v adjacent to a new vertex
t if and only if v lies on
the boundary of the
triangle t, the resulting
graph is the Gray graph.
• Hence the Gray graph fits
onto the same surface!
The lower bound
• The upper bound for genus is 7.
The lower bound 7 follows from
the following:
• Proposition: Let L be the Levi
graph and let M be the Menger
graph of some (v3) configuration
C, then g(M) g(L).
• Proof: Start with the genus
embedding of L. By the reverse
process depicted in the figure
one can obtain the embedding of
M in the same surface.
The dual Menger graph D
19
4
7
5
20
6
24
2
3
27
17
8
23
12
16
18
9
21
26
22
1
10
13
25
14
11
15
• There is just one
unfinished case to
consider. Namely, the dual
Menger graph D can also
be embedded into the
surface of genus 7. It turns
out that this graph is quite
interesting. It is a Cayley
graph of the semidirect
product Z3 ⋉ Z9. It can be
described as a Z9-covering
graph over the base graph
in the next slide.
The Voltage Graph
+2
-4
+4 +1
+2
+1
-2
• The Dual Menger
graph is the Z9
covering graph over
-1
the voltage graph on
the left.
• It can be viewed as the
Cayley graph for the
+4
following
presentation.
The Holt Graph
• The 4-valent Holt
graph H is a spanning
subgraph of on 27
vertices is the smallest
1/2-arc transitive
graph. This means it is
vertex- and edge- but
not arc-transitive. It is
depicted in the figure
on the left.
The Holt Graph - again
+2
-4
-1
+4 +1
+2
+1
-2
+4
• The 4-valent Holt graph H
is an induced subgraph of
the graph D. It is obtained
from D by removing a
suitable 2-factor
composed of three 9cycles. H is a Z9-covering
graph over the green
voltage graph on the left
[with the 3 red loops
removed.]
Some Presentations for Z3 ⋉ Z9
• Both H and D are Cayley graphs for the
same group Z3 ⋉ Z9.
– Z3 ⋉ Z9 = <a, b | a9 = b3 = 1, b-1ab = a2>
– D = <x, y, z | x9 = y9 = z9 = 1, y-1xy = x2,
y-1zy = z2, x-1yx = y2, x-1zx = z2, z-1xz = x2,
z-1yz = y2>
– H is obtained from D by omitting any single
generator x,y,or z.
The Final Problems
• What is the genus of D? What is the genus of H?
The genus of Z3 ⋉ Z9 is known. It is g(Z3 ⋉ Z9)
= 4. On the other hand we proved that D admits an
embedding into the surface of genus 7. Hence
– 4 g(D) 7
– 4 g(H) 7
• In the first case one should improve the lower
bound, in the second, the upper bound should be
improved.
18. Another Case Study - Tennis
Doubles
Story
• This problem was posed by an
undergraduate student, Jure Kališnik, a
tennis doubles fan, during the lectures on
configurations that were held in Ljubljana
in 2002.
Tennis Club Problem
• There are n players in a Tennis Club TC.
The club owns two tennis courts.
Occasionaly the club organizes a Tennis
Doubles tournament with m rounds on both
courts (altogether 2m games) along the
following rules:
• TC1. Each player plays k games.
• TC2. During the tournamet each player meets any other
player on a court at most once.
• TC3. No player may appear in the same round in both
courts.
The Model
•
We may model the tournament schedule by a
configuration table. The table has 4 rows and 2m
columns. The first m columns correspond to the
games played on court A while the second m
columns correspond to the games played on
court B.
1.
2.
3.
4.
5.
6.
Each column has distinct marks.
Each pair of marks appears in the same column at most once.
Each mark appears k times.
8m = nk
The first m columns are permuted arbitrarily.
The second m columns are permuted in such a way that Ci Å Ci+m = ;, for i = 1..m.
The Model and Configurations
• We may model the schedule as a (nk,2m4)
configuration. Clearly k = 8m/n.
• For k · 4 we use the inequality:
• n ¸ 2m ¸ 1 + 4(k - 1)
• may obtain smallest cases:
•
•
•
•
k = 1, n = 8, m = 1 (81, 24)
k = 2, n = 12, m = 3 (122, 64)
k = 3, n = 16, m = 6 (163,124)
k = 4, n = 14, m = 7 (144,144)
The Model and Configurations
• Again, k = 8m/n.
• For k > 4, we use the inequality:
• 2m ¸ n ¸ 1 + 3k.
• may obtain smallest cases:
•
•
•
•
•
k = 5, n = 16, m = 10 (165, 204)
k = 6, n = 20, m = 15 (206, 304)
k = 7, n = 24, m = 21 (247, 424)
k = 8, n = 25, m = 25 (258, 504)
k = 9, n = 32, m = 36 (329, 724)
Tennis Court A
1
2
-
3
4
9
10
-
11
12
1
6
-
11
16
2
7
-
12
17
4
9
-
14
19
4
7
-
10
13
2
5
-
16
19
8
11
-
14
17
2
10
-
14
18
8
12
-
16
20
Tennis Court B
5
6
-
7
8
13
14
-
15
16
17
18
-
19
20
3
8
-
13
18
5
10
-
15
20
3
6
-
9
20
1
12
-
15
18
1
5
-
9
13
3
7
-
11
19
4
6
-
15
17
19. The Martinetti-Boben
Theorem
Martinetti's "Theorem"
• In 1887 V. Martinetti introduced a notion of reduction,
and the notion of irreducible configuration. Using his
reduction, a (v3) configuration can be reduced to a ((v-1)3)
configuration. He also determined the class of all
irreducible configurations.
• Using Martinetti's idea each (v3) configuration can be
obtained by a sequence of operations that are inverse to
reductions.
• There are two problems with his approach.
• Martinetti never made any clear distinctions between geometric and
combinatorial configurations. His method is purely combinatorial and
gives no hint to what extent it applies to geometric configurations.
• The other problem lies in the fact that Martinetti made an error in the
proof and omitted some irreducible configurations. So not only the proof
but the theorem itself has to be modified. This was done by Marko Boben
in his master’s thesis.
(v3) graphs
• A connected, cubic, bipartite graph with
girth at least 6 is called a (v3) graph.
• A (v3) graph is a Levi graph of some
connected (v3) configuration.
Martinetti reduction
• A Martinetti reduction on
a Levi graph is depicted
on the left. In the
corresponding
configuration a line and
incident point is deleted.
• Attention: A Martinetti
reduction can be applied
in two ways by reattaching
pending edges! It can only
be applied if no
quadrilaterals are formed.
u
v
Martinetti reduction and
connectivity.
u'
v'
• The question is
whether one can apply
a Martinetti reduction
on a connected graph
and obtain a
disconnected reduced
graph.
• Here is a construction.
u
Martinetti reduction and
connectivity.
u'
v1
v'1
u1
u'1
v
v'
• Take two Levi graphs
and consider an edge
uv in the first one and
en edge u'v' in the
second one.
• Subdivide each edge
twice: u v1 u1 v and u'
v'1 u'1 v' and identify
the vertices u1 = u'1
and v1 = v'1
Martinetti reduction and
connectivity.
u
v
u'
v1
v'1
u1
u'1
v'
• Take two Levi graphs
and consider an edge
uv in the first one and
en edge u'v' in the
second one.
• Make double
subdivision of each
edge: u v1 u1 v and u'
v'1 u'1 v' and identify
the vertices u1 = u'1
and v1 = v'1
Conditions of Use
•
We make the following assumptions on
the use of Martinetti’s reduction:
1. It can be used only if no quadrilaterals are
introduced.
2. It can only be used if the number of connected
components is not increased.
Irreducible configurations and
graphs.
• A (v3) combinatorial configuration (or its
Levi graph) is irreducible, if we cannot
apply Martinetti’s reduction. Other (v3)
configurations and (v3) graphs are
reducible.
Lemma
• Lemma: A (v3) graph G is irreducible if and
only if for each edge e of G we have:
• e together with another edge forms the intersection
of two 6-cycles or
• e lies on a path efg of lengh 3, that is the
intersection of two 6-cycles.
Proof of Lemma. Part I.
e
e
• Let e be an arbitrary edge
of an irreducible
connected graph G. If it is
reduced by Martinetti a 4cycle is obtained.
• By inspection we see that
G contains two adjacent 6cycles both containing e,
and the intersection is a
path of length 2 or 3 [and
e is not the central edge of
the intersection].
Proof of Lemma, Part II.
e
e
• If e does not lie on the intersection
of two hexagons, the reduction is
possible.
• Therefore, let e be an edge in the
intersection of two 6-cycles.
• There are several cases to
consider. If there is only one edge
in the intersection, the graph is
reducible. There may be two or
three edges in the intersection.
Proof of Lemma, Part II
e
e
• Let e be the edge on the
intersection of two 6cycles. In each case a
four-cycle would be
obtained in the reduction
process.
Graph t, Families t(n) and T(n)
Graph t = S(K_4) on the
left is the basis for the
construction of
families t(n) and T(n)
of graphs.
T(2) = t(4)
• T(2) = t(4)
• T(n) has 20n vertices.
Only 6 vertices of valence
2: three on the top, three
on the bottom. If the three
upper vertices are
connected by the three
lower vertices a cubic
graph results. There are 6
ways of doing this but
only three different graphs
are obtained: T1(n), T2(n)
and T3(n).
Family of graphs C(m)
a
c
A
b
C(3)
• Graph C(m) has 6m
vertices. It is obtained
by connecting m 6cycles as shown on the
C
left.
• From C(m) three
different graphs are
obtained D(3m),
D(3m+1) and
B
D(3m+2). Each graph
D(n) has 2n vertices.
Family of graphs D(3m)
a
• From C(m) the graph
D(3m) is constructed
with no new vertices.
C
Only three edges are
added: A-a,B-b and Cc and the resulting
graph D(3m) is cubic..
c
A
b
B
D(9)
Family of graphs D(3m+1)
a
• From C(m) the graph
D(3m+1) is obtained by
adding two new vertices:
C
X and x. Five edges are
added as shown in the
figure.
c
A
b
B
D(10)
Family of graphs D(3m+2)
• Exercise: Find a paper and describe the
family D(3m+2)
• In order to obtain D(3m+2) there are 4 new
vertices added and a path of length 3.
Graphs D(n), n ¸ 7.
1 2 4
Zn
• The graphs D(n), n ¸ 7 are
Zn covers over the dipole
q3. with voltages 1,2,4.
Hence D(n) = H(2n-1 + 5)
are Haar graphs. It is not
hard to verify that the
LCF code LCF = [5,-5]n
generates them.
D(7)
• D(7) = Heawood
graph.
D(8)
• D(8) = MöbiusKantor graph, Levi
graph of the unique
(83) configuration.
D(9)
• D(9) = Levi graph of
the unique cyclic (93)
configuration.
D(10)
• D(10) = Levi graph of
the unique cyclic
(103) configuration.
The Martinetti-Boben Theorem
• Irreducible, connected (v3) graphs are:
• The graph of the Pappus configuration.
• Graphs T1(n), T2(n), T3(n), for n ¸ 1
• Graphs D(n), for n ¸ 7.
• Remark: Martinetti overlooked the cases
T2(n) and T3(n) and did not mention D(7)
and D(8).
Boben reduction
• Recently Marko Boben
introduced another reduction in
order to further lower the
number of irreducible (v3)
graphs.
• Take two nonadjacent vertices
of different colors. remove them
and re-attach the neigubours of
one to the neighbours of the
second one. There are 6
possibilities.
Theorem
• Theorem: Irreducible, connected (v3) graphs
are:
• Pappus graph.
• Heawood graph D(7).
• Remark: Both Martinetti and Boben
reductions are allowed and the original
condition for use is assumed for both of
them.
New Conditions of Use
•
We can make new assumtions on the use
of Martinetti’s reduction:
1. It can be used only if the girth is not decreased.
2. It can only be used if the number of connected
components is not increased.
•
In this case we obtain irreducible trianglefree configurations, etc.
Some Questions
• This approach raises a number of interesting
questions.
• Which geometric configurations are irreducible in
the sense of Martinetti?
• Which triangle-free (combinatorial) configurations
are irreducible in the sense of Martinetti?
• Which triangle-free (geometric) configurations are
irreducible in the sense of Martinetti?
• Same questions if Boben reductions are added.
Flag sum of combinatorial
configurations
• Take two incidence
structures and a flag in
each of them.
• In Pappus take the
marked point and line.
And in Fano, the
same.
• Switch the
adjacencies.
Point – Line Sum of
Configurations
• Take two incidence structures and
line L in the first one and a point p
in the second. (Valence of L must
be equal to the valence of p!)
• Delete L from the first and p from
the second.
• Attach deficient lines from the
second to the deficient points from
the first.
• Note: we select the circle in the top
Fano plane and the top point of the
bottom Fano plane.
Chapter 4. Statistics Page
•
•
•
•
Number of slides:276
Number of sections:19
Number of exercises:70
Number of homeworks:3