level of target orientation
advertisement

Evaluation of a self-organizing
ambient intelligence based
traffic system
Hermann de Meer, Richard Holzer
Chair for Computer Networks & Computer Communications
University of Passau
Germany
Overview
1.
2.
3.
4.
5.
6.
7.
Modeling Socio-technical systems
Quantitative measures
Traffic scenario
Target orientation
Emergence
Real data measurements
Conclusion
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
2
Socio-technical systems
For the evaluation of socio-technical systems a mathematical model can be
used.
Ambient Intelligence (AmI) based smart environments:
Ability to monitor user actions.
Adjust their configuration and functionality accordingly.
System reacts to human behavior while at the same influencing it.
Feedback loop
Tight entanglement between the human and the technical system.
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
3
Socio-technical systems
SOCIONICAL
Large scale integrating project funded by the EU in FP7 (ICT).
Duration: 1.2.2009-31.1.2013
Development and evaluation of methods and tools for modeling,
simulation, and prediction of global properties and emergent phenomena in
large scale socio-technical systems.
Focuses on AmI based smart environments.
Partners:
Universität Passau
Beacon Tech LTD
Universität Linz
London School of Economics and Political Science
Eidgenössische Technische Hochschule Zürich
Vereiniging voor Christelijk Hoger Onderwijs
Wetenschappelijk Onderzoek en Patientenzorg
Akademia Górniczo-Hutnicza im. Stanis#awa Staszica w Krakowie
Julius-Maximilians Universität Würzburg
Fraunhofer Gesellschaft zur Förderung der angewandten Forschung E.V.
Sociedad Iberica de Construcciones Electricas Sa
SmartCare Srl
Technische Universität München
Martin-Luther-Universität Halle-Wittenberg
Civil Protection Department - Ministry of Home Affairs
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
4
Modeling approaches
Modeling
Micro-level modeling
Quantitative
measures
Behavior of each entity
Time: Continuous/discrete
State space: Continuous/discrete
Behavior: Deterministic/stochastic
Local rules:
• Local differential equations
• Automata
Macro-level modeling
Macro states are aggregated
micro states
Time: Continuous/discrete
State space: Continuous/discrete
Behavior: Deterministic/stochastic
Global rules:
• Differential equations
• Recurrence equation
• Transition probabilities/rates
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
5
Socio-technical systems
After building the model, evaluation methods have to be
chosen:
Analytical evaluation methods
Simulation
For analyzing self-organizing properties of a socio-technical
system, quantitative measures have been developed.
Quantitative measures are defined on the micro level to
describe global properties.
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
6
Quantitative Measures
The following quantitative measures are based on information entropy H:
Levels of
•
emergence
•
Are there any coherent patterns induced by local interactions?
•
autonomy
•
How much control data from external entities are needed to keep the system
running?
•
global state awareness
•
How much information does a single entity have about the global state
(averaged over all entities)?
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
7
Quantitative Measures
The following quantitative measures are based on fitness functions:
Levels of
•
target orientation
•
Is the high-level goal that the system designer had in his mind, reached by the
system?
•
adaptivity
•
Is the high-level goal also reached after changes in the environment (new
control data from external entities)?
•
resilience
•
Is the high-level goal still reached after unexpected events in the system (e.g.
break down of nodes, attacks by an intruder, …)?
Although quantitative measures are defined analytically on the micro level, it is usually
too difficult to calculate them analytically, so they are approximated by
simulations.
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
8
Emergence
To measure the level of emergence
[0, 1]
of a system, we consider the values in the communication channels k K between the
entities and compute the dependencies.
At time t we compare the information contained in all channels with the sum of the
information contained in each single channel:
t = 1 – (H(Conft|K) / kK H(Conft|k))
where Conft is the global state containing all local states and all values on the
communication channels at time t and Conft|K is the valuation of communication
channels at time t and H denotes the information entropy.
Level of emergence of the whole system in the interval [0, T]:
[0, T] = Avg(t),
Time average value of the map : [0, T] [0, 1]
[0, T] 1
[0, T] 0
high level of emergence
low level of emergence
(many dependencies)
(few dependencies)
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
9
Global state awareness
To measure the level of global state awareness
[0, 1]
the initial states are partitioned according to the equivalence relation
induced by a property of interest.
Measurement of the information of each node about the initial
equivalence class (averaged over all nodes):
t is a nondecreasing function of the time:
Increasing local history leads to a decreasing entropy.
Level of global state awareness of the whole system in a time interval [0, T]:
[0, T] = Avg() Time average value of the map : [0, T] [0, 1]
[0, T] 1 means high level of global state awareness
(each node knows much about initial equivalence class)
[0, T] 0 means low level of global state awareness
(each node knows few about initial equivalence class)
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
10
Target orientation
Before a new system is designed, we have a goal of the system in our mind:
The system should fulfil a given purpose.
Fitness function: In the model, the goal can be described by a valuation of configurations
(either time dependent or time independent):
bt : Conf ! [0, 1]
(Conf is the set of all global states)
Level of target orientation at time t:
TOt = E(bt(Conft)),
where E(X) is the mean value of a random variable X, i.e.
TOt is the average valuation of the global state Conft at time t.
Level of target orientation of the whole system in a time interval [0, T]:
TO[0, T] = Avg(TOt)
Time average value of the map TO : [0, T] [0, 1]
TO[0, T] 1 means that the system mostly runs through many good configurations
) high level of target orientation
TO[0, T] 0 means that the system mostly runs through many bad configurations
) low level of target orientation
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
11
Traffic scenario
Scenario:
There was an accident on a highway
Other cars slow down, when they are approaching the scene of accident.
Possibility for AmI device:
Some cars may contain a device, which send information (e.g., current position) to
other cars to improve safety.
The device can give advice to the driver (e.g., slow down) before he reaches the
scene of accident
Which rules for the AmI device leads to a high level of target orientation?
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
12
Traffic scenario
Proposed system:
If speed of a car is below a threshold v0, AmI device sends an alert to inform the
cars behind.
Alerts are forwarded backwards by other cars together with the position of the
original sender.
If the distance to the sender is smaller than a threshold sr (relevance distance),
the adaptive-cruise-control (ACC) is activated:
Time headway is changed to a predefined value thw.
Car stays in current lane until the merging point (100m before the accident) is
reached.
time headway
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
13
Traffic scenario
For the analysis, we consider only a short road section (communication
area for AmI alerts):
Outside of the communication area, the distance to traffic jam is larger than the
threshold sr during the whole run of the simulation, so the alert signals would
have no effect on the behavior.
The number of cars in this communication area varies from 10 to 140.
beginning of road section
relevance area: 2382 m
end of road section
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
14
Target orientation
For the level of target orientation, we have different possibilities to define
a "fitness function" b : Conf ! [0, 1] for the current state:
#1
#2
#3
#4
#5
#6
Based on the variance of the velocities of the cars.
Based on the variance of the time headways of the cars.
Based on the variance of the velocity change.
Based on the variance of the time headways change.
Based on the relative velocities from one car to the next car.
Throughput through the single lane area.
Variation of different system parameters:
Equipment rate for AmI device: r { 0%, 10%, 50%, 100% }
Traffic flow (vehicles per hour): f { 500, 1000, 1500 }
Desired time headway in ACC: thw { 1.5, 1.8, 2.1 }
Other system parameters (v0 = 30km/h, sr = 1000m) are constant.
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
15
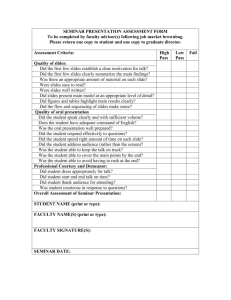
Target orientation
TOt
Measure #1:
TO using variance of
velocity vi of each car i
level of target orientation
time
[sec]
mean velocity
empirical variance
variance coefficient
Parameters: r = 100%, f = 1500
Variation of system parameter thw in ACC:
thw = 1.5 average TO[0, T] = 0.38
thw = 2.1 average TO[0, T] = 0.39
nt
number of cars in the system at time t
K
normalizing constant for the variance coefficient
T = 1800sec
(time of the simulated system)
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
16
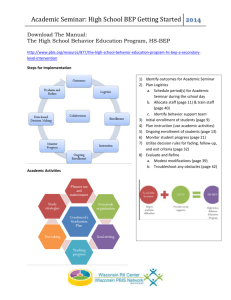
Target orientation
TOt
Measure #2:
TO using variance of time
headway thwi of each car i
level of target orientation
time
[sec]
mean time headway
empirical variance
variance coefficient
nt
number of cars in the system at time t
K
normalizing constant for the variance coefficient
Parameters: r = 100%, f = 1500
Variation of system parameter thw in ACC:
thw = 1.5 average TO[0, T] = 0.94
thw = 2.1 average TO[0, T] = 0.95
T = 1800sec
(time of the simulated system)
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
17
Target orientation
In the analysis we investigated the influence of different types of system
parameters:
The time headway thw for the ACC is a system parameter which can be chosen by the
system designer.
The equipment rate r can not be chosen by the system designer, but it expresses the
proportion of cars, in which the AmI device is implemented.
The aim of the analysis of this parameter is the optimization of the system with respect to
predefined criteria.
The results can be used to analyze the influence of the equipment rate to the high level
goal (traffic safety).
The traffic flow can not be chosen by the system designer either, but it describes the
density of the traffic flow.
The results of the analysis can be used to analyze different highways or different times of
day (rush hours usually have a higher value for this parameter).
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
18
Target orientation
For the analysis, we investigate the values of the measures for one variable
parameter and two constant parameters:
For fixed values thw and f and variable values for r we observe:
Measure #1 is often decreasing for increasing equipment rate r.
Concerning measure #2, the results for a low input traffic flow f are nearly independent
of the equipment rate r, but for f ≥ 1000, the measure yields a strong increase for r =
100% compared to lower equipment rates. Therefore a high equipment rate yields a
high level of target orientation with measure #2, if the input traffic flow is not too low.
For f ≥ 1000, measure #3 is monotone increasing with the equipment rate, so also in
this case, a high equipment rate yields a higher level of target orientation.
Similar to measure #2, also measure #4 shows a strong increase for r = 100% compared
to lower equipment rates, but only for the input traffic flow f = 1500.
Measure #5 is often decreasing for increasing equipment rate r.
Measure #6 is often slightly decreasing for increasing equipment rate r.
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
19
Target orientation
For the analysis, we investigate the values of the measures for one variable
parameter and two constant parameters:
For fixed values f and r and variable values for thw we observe:
While for the measures #1, #4 and #5 no monotone behavior can be seen, the
measures #2 and #3 are often increasing with thw, so usually a higher value for this
system parameters leads to a higher value for the level of target orientation for the
measures #2 and #3.
Measure #6 is slightly decreasing with increasing parameter thw, so a higher value for
the parameter leads to a slightly smaller throughput.
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
20
Target orientation
For the analysis, we investigate the values of the measures for one variable
parameter and two constant parameters:
For fixed values thw and r and variable values for f we observe:
The measures #1, #4 and #5 are decreasing for increasing input traffic flow f.
The measure #2 is decreasing for increasing input traffic flow f if r ≤ 50%.
The measures #3 and #6 are increasing for increasing input traffic flow f. A higher input
traffic flow obviously leads to a higher throughput.
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
21
Emergence
How can the measure of emergence be applied in this scenario?
Problem:
An analytic evaluation of the measure is impossible because of the high
complexity of the system.
Therefore, approximation methods based on simulation results are needed.
Since the measure of emergence is based on the statistical entropy,
probabilities have to be approximated by relative frequencies.
But the global state space is too large, such that a lot of simulations would be
necessary to achieve accurate results.
Our approach: Use an aggregation technique on the state space to improve
the usability of simulation results.
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
22
Emergence
How can we define the partition on the global state space for aggregation?
For the definition of the emergence, only the values on the communication channels
are relevant.
Internal states of the nodes can be ignored.
Communication:
Only alert signals are sent.
Content: Position of sender
New alert signal: If the car's speed is below a threshold
Forwarded alert signal: If a signal is received from front, it is forwarded to the cars behind.
Possibilities for state aggregation:
Consider each communication channel as a broadcast channel.
Decompose the area of relevance into n fixed road sections. Aggregate all positions of one
section into a single value, i.e. the content of the alert signal is the section of the sender.
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
23
Emergence
This approximation method has been tested for the following cases:
r = 100%, f = 1500, thw = 1.5
r = 100%, f = 1500, thw = 2.1
For both cases we used 20 simulation runs and n = 10 road sections.
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
24
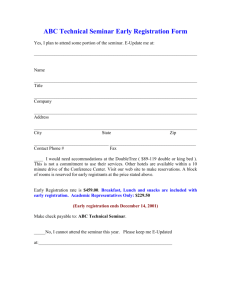
Emergence
t
Emergence with aggregation
t
thw = 1.5
thw = 2.1
Average: [0, T] = 0.9766
time
[sec]
Average: [0, T] = 0.9771
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
time
[sec]
25
Emergence
Interpretation of emergence:
The level of emergence indicates the presence of global patterns in the system.
Global patterns can be seen as dependencies between the communications of
different nodes.
A high value indicates high dependencies:
A newly generated alert signal is forwarded by other nodes, the communication data of
different nodes are highly dependent.
This is represented by a high value of emergence.
But:
How accurate is the approximation method?
20 simulations might be not sufficient.
Was n = 10 road sections a good choice?
The aggregation leads to a decrease in entropy and to an increase for the level of
emergence.
What happens, if we calculate the emergence without aggregation in road sections?
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
26
Emergence
Emergence without aggregation
t
t
thw = 1.5
thw = 2.1
Average: [0, T] = 0.8843
time
[sec]
Average: [0, T] = 0.8867
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
time
[sec]
27
Target oriented emergence
Depending on the situation, emergence can be a good or a bad property in a
system.
Traffic jam is a global pattern, which can be interpreted as an emergent
phenomenon in the system.
A homogeneous traffic flow around the accident scenario is also a global
pattern, which can be interpreted as an emergent phenomenon in the
system.
We have to distinguish between
emergence in general and
target oriented emergence.
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
28
Target oriented emergence
How about the emergence in our scenario?
High emergence for both values of thw:
thw = 1.5 average t = 0.9766
thw = 2.1 average t = 0.9771
emergence
Target orientation depends on
the fitness function:
target orientation
#1
Measure #1:
#2
Measure #2:
thw = 1.5 average TO[0, T] = 0.38
thw = 2.1 average TO[0, T] = 0.39
thw = 1.5 average TO[0, T] = 0.94
thw = 2.1 average TO[0, T] = 0.95
Low target orientation
High target orientation
Target oriented emergence
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
29
Real data measurements
Questions:
Can we apply the defined quantitative measures (target orientation, emergence) also
on real data?
Can we compare the results received from the simulations with the results received
from real data?
First we have to identify, which kind of real data is available.
Data from the highway M30 in Madrid:
Detectors with sensors are located at the road.
Each track of the road is sensed independently.
Output of the detector:
Number of cars in the sensed track in a time interval of length 60sec.
Average speed of the cars the sensed track in a time interval of length 60sec.
We have M30 data available of one day, when an accident occurred, so we have a scenario
similar to the scenario already analyzed in the simulation.
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
30
Real data measurements
But the defined measures can not be directly applied to the M30 data, because
different detectors count only the cars, they can not identify them, so we
have no trajectory of a car,
the speed of a single car is not available,
the time headway is not available,
the cars do not have an AmI device, so the data covers only the case r = 0%.
To make the analysis of the simulation results comparable to the analysis of the
M30 data, we have to adjust the measures, such that they can be applied to
both types of data.
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
31
Real data measurements
To be able to define a measure, which is applicable for both types of data, the simulation
results must be aggregated in the same way:
Time intervals of length 60sec are considered.
In each time interval, the number of cars passing some specified positions (the
positions of the detectors) is counted and the average speed is calculated.
Measure for target orientation based on the variance of velocities:
The number of cars detected in the time interval is used as a weight in the formula of
the mean velocity t and the empirical variance t.
Then the level of target orientation is defined as before:
This method is currently implemented by the University of Passau. The evaluation and
comparison is planned for the next weeks.
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
32
Conclusion
Quantitative measures can be used for the analysis and for the optimization the system
parameters and the local rules.
Level of target orientation:
Level of emergence:
For each setting, simulation runs lead to an approximation of the level of target orientation.
The highest level of target orientation indicates the optimal values for the system parameters.
Identification and analysis of the global patterns emerging from the local rules.
Measure of global state awareness
Some drivers already know about the traffic jam near the accident.
Other drivers are not aware of the situation.
The measure for global state awareness can be applied to analyze the influence of different settings for
system parameters:
Which system parameters can increase the global state awareness?
Safety can be increased, if all drivers have maximal information about the global state.
Combination of measures: Target oriented emergence
) Improved safety in traffic
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
33
Conclusion
Quantitative measures provide a link from the micro level to the macro level:
• They describe global properties of the system
• They can be used for the analysis of complex systems.
• They can be used for optimization of existing systems and for the design and
engineering and of new systems.
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
34
Thank you for your attention
Hermann de Meer
Chair for Computer Networks & Computer Communications
University of Passau
Germany
demeer@fim.uni-passau.de
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
35
References
•
•
•
•
•
•
•
Richard Holzer and Hermann de Meer and Christian Bettstetter. On autonomy and emergence in selforganizing systems. IWSOS 2008 - 3rd International Workshop on Self-Organizing Systems, Vienna,
Austria, December 10-12, 2008, Springer Verlag 2008
Christopher Auer, Patrick Wüchner, and Hermann de Meer. The Degree of Global-State Awareness in
Self-Organizing Systems. In Proc. of 4th International Workshop on Self-Organizing Systems (IWSOS
2009). Zurich, Switzerland, December 9-11, 2009. Springer, LNCS.
R. Holzer and H. de Meer. Quantitative Modeling of Self-Organizing Properties. In Proc. of 4th
International Workshop on Self-Organizing Systems (IWSOS 2009). Zurich, Switzerland, December 9-11,
2009. Springer, LNCS.
R. Holzer and P. Wüchner and H. de Meer. Modeling of Self-Organizing Systems: An Overview. In
Workshop über Selbstorganisierende, adaptive, kontextsensitive, verteilte Systeme (SAKS 2010),
Electronic Communications of the EASST, Vol. 27, 2010
R. Holzer and H. de Meer. Methods for Approximations of Quantitative Measures in Self-Organizing
Systems. In Proc. of 5th International Workshop on Self-Organizing Systems (IWSOS 2011). Karlsruhe,
Germany, February 23-24, 2011. Springer, LNCS.
Richard Holzer and Hermann De Meer. Modeling and Application of Self-Organizing Systems - Tutorial
Paper. Proc. of the 5th Int'l IEEE Conference on Self-Adaptive and Self-Organizing Systems (SASO 2011)
of IEEE Computer Society Press. 2011
Matthew Fullerton, Richard Holzer, Hermann de Meer, Cristina Beltran Ruiz. Determining the
Effectiveness of Ambient Intelligence within the Area of a Traffic Accident. Poster presentation at the
6th Int'l Workshop on Self‐Organizing Systems (IWSOS 2012)
Hermann de Meer, Richard Holzer, 8th ECCO Seminar Series
36