of the TSP
advertisement

The Travelling Salesman Problem:
A brief survey
Martin Grötschel
Vorausschau auf die Vorlesung
Das Travelling-Salesman-Problem (ADM III)
im WS 2013/14
14. Oktober 2013
Martin Grötschel
Institute of Mathematics, Technische Universität Berlin (TUB)
DFG-Research Center “Mathematics for key technologies” (MATHEON)
Konrad-Zuse-Zentrum für Informationstechnik Berlin (ZIB)
groetschel@zib.de
http://www.zib.de/groetschel
2
Contents
1. Introduction
2. The TSP and some of its history
3. The TSP and some of its variants
4. Some applications
5. Modeling issues
6. Heuristics
7. How combinatorial optimizers do it
Martin
Grötschel
3
Contents
1. Introduction
2. The TSP and some of its history
3. The TSP and some of its variants
4. Some applications
5. Modeling issues
6. Heuristics
7. How combinatorial optimizers do it
Martin
Grötschel
4
Combinatorial optimization
Given a finite set E and a subset I of the power set of E (the set of
feasible solutions). Given, moreover, a value (cost, length,…) c(e) for all
elements e of E. Find, among all sets in I, a set I such that its total value
c(I) (= sum of the values of all elements in I) is as small (or as large) as
possible.
The parameters of a combinatorial optimization problem are: (E, I, c).
min c(I) c(e) | I I , where I 2 E and E finite
eI
An important issue: How is I given?
Martin
Grötschel
5
Special „simple“
combinatorial optimization problems
Finding a
minimum spanning tree in a graph
shortest path in a directed graph
maximum matching in a graph
minimum capacity cut separating two given nodes of a
graph or digraph
cost-minimal flow through a network with capacities and
costs on all edges
…
These problems are solvable in polynomial time.
Martin
Grötschel
6
Special „hard“
combinatorial optimization problems
travelling salesman problem (the prototype problem)
location und routing
set-packing, partitioning, -covering
max-cut
linear ordering
scheduling (with a few exceptions)
node and edge colouring
…
These problems are NP-hard
(in the sense of complexity theory).
Martin
Grötschel
7
The travelling salesman problem
Given n „cities“ and „distances“ between them.
Find a tour (roundtrip) through all cities visiting
every city exactly once such that the sum of all
distances travelled is as small as possible. (TSP)
The TSP is called symmetric (STSP) if, for every
pair of cities i and j, the distance from i to j is
the same as the one from j to i, otherwise the
problem is called asymmetric (ATSP).
Martin
Grötschel
http://www.tsp.gatech.edu/
9
THE TSP
book
suggested reading for
everyone interested
in the TSP
Martin
Grötschel
10
Martin
Grötschel
Another recommendation
Bill Cook‘s new book
11
The travelling salesman problem
Two mathematical formulations of the TSP
1. Version :
Let K n (V , E ) be the complete graph or digraph with n nodes
and let ce be the length of e E. Let H be the set of all
hamiltonian cycles (tours ) in K n . Find
min{c(T ) | T H}.
2. Version :
Find a cyclic permutation of {1,..., n} such that
n
c
i 1
i (i )
is as small as possible.
Martin
Grötschel
Does that help solve the TSP?
12
Contents
1. Introduction
2. The TSP and some of its history
3. The TSP and some of its variants
4. Some applications
5. Modeling issues
6. Heuristics
7. How combinatorial optimizers do it
Martin
Grötschel
13
Usually quoted as
the forerunner of
the TSP
Usually quoted as
the origin of
the TSP
Martin
Grötschel
about 100
years
earlier
15
By a proper choice and
scheduling of the tour one
can gain so much time
that we have to make
some suggestions
The most important
aspect is to cover as many
locations as possible
without visiting a
location twice
Martin
Grötschel
16
A TSP contest 1962: 10.000 $ Prize
Martin
Grötschel
17
Ulysses roundtrip (an even older TSP ?)
The paper „The Optimized Odyssey“ by Martin Grötschel
and Manfred Padberg is downloadable from
http://www.zib.de/groetschel/pubnew/paper/groetschelpadberg2001a.pdf
Martin
Grötschel
18
Ulysses
The distance table
Martin
Grötschel
19
Ulysses roundtrip
optimal „Ulysses tour“
Martin
Grötschel
20
Malen nach Zahlen
TSP in art ?
When was this invented?
Martin
Grötschel
21
Survey Books
Literature: more than 1000 entries in Zentralblatt/Math
Zbl 0562.00014 Lawler, E.L.(ed.); Lenstra, J.K.(ed.); Rinnooy
Kan, A.H.G.(ed.); Shmoys, D.B.(ed.)
The traveling salesman problem. A guided tour of
combinatorial optimization. Wiley-Interscience Series in Discrete
Mathematics. A Wiley-Interscience publication. Chichester etc.: John
Wiley \& Sons. X, 465 p. (1985). MSC 2000: *00Bxx 90-06
Zbl 0996.00026 Gutin, Gregory (ed.); Punnen, Abraham P.(ed.)
The traveling salesman problem and its variations.
Combinatorial Optimization. 12. Dordrecht: Kluwer Academic
Publishers. xviii, 830 p. (2002). MSC 2000: *00B15 90-06 90Cxx
Martin
Grötschel
22
Contents
1. Introduction
2. The TSP and some of its history
3. The TSP and some of its variants
4. Some applications
5. Modeling issues
6. Heuristics
7. How combinatorial optimizers do it
Martin
Grötschel
The Travelling Salesman Problem
and Some of its Variants
23
The symmetric TSP
The asymmetric TSP
The TSP with precedences or time windows
The online TSP
The symmetric and asymmetric m-TSP
The price collecting TSP
The Chinese postman problem
(undirected, directed, mixed)
Bus, truck, vehicle routing
Edge/arc & node routing with capacities
Combinations of these and more
Martin
Grötschel
24
Martin
Grötschel
http://www.densis.fee.unicamp.br/~
moscato/TSPBIB_home.html
25
Contents
1. Introduction
2. The TSP and some of its history
3. The TSP and some of its variants
4. Some applications
5. Modeling issues
6. Heuristics
7. How combinatorial optimizers do it
Martin
Grötschel
26
Production of ICs and PCBs
Integrated Circuit (IC)
Printed Circuit Board (PCB)
Problems: Logical Design, Physical Design
Correctness, Simulation, Placement of
Components, Routing, Drilling,...
Martin
Grötschel
27
Correct modelling of a
printed circuit board drilling problem
length of a
move of the
drilling head:
Euclidean norm,
Max norm,
Manhatten norm?
2103 holes to be drilled
Martin
Grötschel
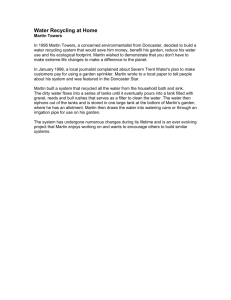
28
Drilling 2103 holes into a PCB
Significant Improvements
via TSP
(due to Padberg & Rinaldi)
Martin
Grötschel
industry solution
optimal solution
Siemens-Problem
PCB da4
Martin Grötschel, Michael Jünger, Gerhard Reinelt,
Optimal Control of Plotting and Drilling Machines:
A Case Study, Zeitschrift für Operations Research,
35:1 (1991) 61-84
http://www.zib.de/groetschel/pubnew/paper/groetscheljuengerreinelt1991.pdf
before
after
Siemens-Problem
PCB da1
Grötschel, Jünger, Reinelt
before
after
31
Martin
Grötschel
32
Leiterplatten-Bohrmaschine
Printed Circuit Board Drilling Machine
Martin
Grötschel
33
Martin
Grötschel
Foto einer Flachbaugruppe
(Leiterplatte)
34
Martin
Grötschel
Foto einer Flachbaugruppe
(Leiterplatte) - Rückseite
35
442 holes to be drilled
Martin
Grötschel
36
Typical PCB drilling problems at
Siemens
da1
da2
da3
da4
Number of holes
2457
423
2203
2104
Number of drills
7
7
6
10
3518728
1049956
1958161
4347902
Tour length
Table 4
Martin
Grötschel
37
Fast heuristics
CPU time (min:sec)
Tour length
Improvement in %
da1
da2
da3
da4
1:58
0:05
1:43
1:43
1695042
984636
1642027
1928371
56.87
14.60
26.94
58.38
Table 5
Martin
Grötschel
38
Martin
Grötschel
Optimizing the stacker cranes of a
Siemens-Nixdorf warehouse
39
Herlitz at Falkensee (Berlin)
Martin
Grötschel
40
Martin
Grötschel
Example: Control of the stacker
cranes in a Herlitz warehouse
41
Logistics of collecting
electronics garbage
Andrea Grötschel
Diplomarbeit (2004)
Martin
Grötschel
42
Location plus tour planning (m-TSP)
Martin
Grötschel
43
The Dispatching Problem at ADAC:
an online m-TSP
Dispatching Center (Pannenzentrale)
Data Transm.
„Gelber Engel“
Martin
Grötschel
Dispatcher
Online-TSP (in a metric space)
Instance:
r1 , r2 , , rn where ri (ti , xi )
x1
x1
t t1
Goal:
0
t t2
x2
0
Find fastest tour serving all requests
(starting and ending in 0)
Algorithm ALG is c-competitive if
ALG c OPT
for all request sequences
45
Implementation competitions
Martin
Grötschel
46
Contents
1. Introduction
2. The TSP and some of its history
3. The TSP and some of its variants
4. Some applications
5. Modeling issues
6. Heuristics
7. How combinatorial optimizers do it
Martin
Grötschel
47
LP Cutting Plane Approach
Even MODELLING is not easy!
What is the „right“ LP relaxation?
N. Ascheuer, M. Fischetti, M. Grötschel,
„Solving the Asymmetric Travelling Salesman
Problem with time windows by branch-and-cut“,
Mathematical Programming A (2001), see
http://www.zib.de/groetschel/pubnew/paper/ascheuerfischettigroetschel2001.pdf
Martin
Grötschel
48
IP formulation of the asymmetric TSP
min cT x
Martin
Grötschel
x( (i ))
1
i V 0
x( (i ))
1
i V 0
x( A(W )) | W | 1
W V 0 , 2 | W | n
xij 0,1
(i, j ) A.
49
Time Windows
This is a typical situation in delivery problems.
Customers must be served during a certain
period of time, usually a time interval is given.
access to pedestrian areas
opening hours of a customer
delivery to assembly lines
just in time processes
Martin
Grötschel
50
Model 1
T
min c x
Martin
Grötschel
x( (i ))
1
i V 0
x( (i ))
1
i V 0
ti ij (1 xij ) M
tj
i, j A, j 0
ri
di
i V
ti
i V 0
ti
N
xij
0,1 i, j A.
51
Model 2
min cT x
x( (i ))
1
i V 0
x( (i ))
1
i V 0
x( A(W )) | W | 1
W V 0 , 2 | W | n
x( P ) | P | 1 k 2 infeasible path P (v1 , v2 ,
xij 0,1
Martin
Grötschel
(i, j ) A.
, vk )
52
Model 3
T
min c x
x( (i ))
1
i V 0
x( (i ))
1
i V 0
n
n
y
i 1
i j
ij
i 0
i j
ij
xij
ri xij yij di xij
Martin
Grötschel
n
y jk j V
k 1
k j
i, j 0,
, n, i j , i 0
xij
0,1
(i, j ) A
yij
0,1, 2,...
(i, j ) A
Model 1, 2, 3
min cT x
x( (i ))
1
i V 0
x( (i ))
1
i V 0
ti ij (1 xij ) M
tj
i, j A, j 0
ri
di
i V
ti
i V 0
ti
N
xij
0,1 i, j A.
min cT x
x( (i ))
1
i V 0
x( (i ))
1
i V 0
n
n
y
i 1
i j
ij
i 0
i j
1
i V 0
x( (i ))
1
i V 0
x( A(W )) | W | 1
k 1
k j
i, j 0,
, n, i j , i 0
0,1
(i, j ) A
yij
0,1, 2,...
(i, j ) A
W V 0 , 2 | W | n
(i, j ) A.
y jk j V
xij
x( P ) | P | 1 k 2 infeasible path P (v1 , v2 ,
xij 0,1
xij
ri xij yij di xij
min cT x
x( (i ))
ij
n
, vk )
54
Cutting Planes Used for all Three Models
(Separation Routines)
Martin
Grötschel
Subtour Elimination Constraints (SEC)
2-Matching Constraints
, ,( , )-Inequalities
"Special“ Inequalities and PCB-Inequalities
Dk-Inequalities
Infeasible Path Elimination Constraints (IPEC)
Strengthened , -Inequalities
Two-Job Cuts
Pool Separation
SD-Inequalities
+ various strengthenings/liftings
55
Further Implementation Details
Preprocessing
Martin
Grötschel
Tightening Time Windows
Release and Due Date Adjustment
Construction of Precedences
Elimination of Arcs
Branching (only on x-variables)
Enumeration Strategy (DFS, Best-FS)
Pricing Frequency (every 5th iteration)
Tailing Off
LP-exploitation Heuristics (after a new feasible LP
solution is found),
they outperform the other heuristics
56
Results
Very uneven performance
Model 1 is really bad in general
Model 2 is best on the average (winner in 16
of 22 test cases)
Model 3 is better when few time windows are
active (6 times winner, last in all other cases,
severe numerical problems, very difficult LPs)
How could you have guessed?
Martin
Grötschel
57
Unevenness of Computational
Results
problem
#nodes
gap
#cutting
planes
rbg041a
43
9.16%
> 1 mio
rbg067a
69
0%
176
#LPs
109,402 > 5 h
2
Largest problem solved to optimality: 127 nodes
Largest problem not solved optimally: 43 nodes
Martin
Grötschel
time
6 sec
58
Contents
1. Introduction
2. The TSP and some of its history
3. The TSP and some of its variants
4. Some applications
5. Modeling issues
6. Heuristics
7. How combinatorial optimizers do it
Martin
Grötschel
59
Need for Heuristics
Many real-world instances of hard combinatorial
optimization problems are (still) too large for exact
algorithms.
Or the time limit stipulated by the customer for the
solution is too small.
Therefore, we need heuristics!
Exact algorithms usually also employ heuristics.
What is urgently needed is a decision guide:
Which heuristic will most likely work well on what
problem ?
Martin
Grötschel
60
Primal and Dual Heuristics
Primal Heuristic: Finds a (hopefully) good feasible solution.
Dual Heuristic: Finds a bound on the optimum solution value
(e.g., by finding a feasible solution of the LP-dual of an LPrelaxation of a combinatorial optimization problem).
Minimization:
dual heuristic value ≤ optimum value ≤ primal heuristic value
quality guarantee
in practice and theory
Martin
Grötschel
61
Heuristics: A Survey
Greedy Algorithms
Exchange & Insertion Algorithms
Neighborhood/Local Search
Variable Neighborhood Search, Iterated Local Search
Random sampling
Simulated Annealing
Taboo search
Great Deluge Algorithms
Simulated Tunneling
Neural Networks
Scatter Search
Greedy Randomized Adaptive Search Procedures
Martin
Grötschel
62
Heuristics: A Survey
Genetic, Evolutionary, and similar Methods
DNA-Technology
Ant and Swarm Systems
(Multi-) Agents
Population Heuristics
Memetic Algorithms (Meme are the “missing links” gens and
mind)
Fuzzy Genetics-Based Machine Learning
Fast and Frugal Method (Psychology)
Method of Devine Intuition (Psychologist Thorndike)
…..
Martin
Grötschel
63
The typical heuristics junk
Hyper-heuristics in Co-operative Search
The interest in parallel co-operative approaches has risen considerably due to, not only
the availability of co-operative environments at low cost, but also their success to provide
novel ways to combine different (meta-)heuristics. Current research has shown that the
parallel execution and co-operation of several (meta-)heuristics could improve the quality
of the solutions that each of them would be able to find by itself working on a standalone
basis. Moreover, parallel and distributed approaches can be used to provide more
powerful and robust problem solving environments in a variety of problem domains.
Hyper-heuristics, on the other hand, represent a set of search methodologies which are
applicable to different problem domains. They aim to raise the level of generality, for
example by choosing and/or generating new methodologies on demand during the search
process. The goal of this study is to explore the cooperative search mechanisms within a
hyper-heuristic framework. This exciting research area lies at the interface between
operational research and computer science and involves understanding of (distributed)
decision making mechanisms and learning, design, implementation and analysis of
automated search methodologies. The application domains will be cross disciplinary.
Martin
Grötschel
64
Heuristics: A Survey
Currently best heuristic with respect to worst-case guarantee:
Christofides heuristic
compute shortest spanning tree
compute minimum perfect 1-matching of graph induced by the odd
nodes of the minimum spanning tree
the union of these edge sets is a connected Eulerian graph
turn this graph into a tour by making short-cuts.
For distance functions satisfying the triangle inequality, the resulting tour
is at most 50% above the optimum value
Martin
Grötschel
65
Understanding Heuristics,
Approximation Algorithms
worst case analysis
There is no polynomial time approx. algorithm for STSP/ATSP.
Christofides algorithm for the STSP with triangle inequality
average case analysis
Karp‘s analysis of the patching algorithm for the ATSP
probabilistic problem analysis
for Euclidean STSP in unit square, TSP constant 1.714.. n
polynomial time approximation schemes (PAS)
Arora‘s polynomial-time approximation schemes for
Euclidean STSPs
fully-polynomial time approximation schemes (FPAS)
not for TSP/ATSP but, e.g., for knapsack (Ibarra&Kim)
These concepts – unfortunately – often do not really help to guide
practice.
experimental evaluation
Lin-Kernighan for STSP (DIMACS challenges))
Martin
Grötschel
66
Contents
1. Introduction
2. The TSP and some of its history
3. The TSP and some of its variants
4. Some applications
5. Modeling issues
6. Heuristics
7. How combinatorial optimizers do it
Martin
Grötschel
67
Polyhedral Theory (of the TSP)
STSP-, ATSP-,TSP-with-side-constraintsPolytope:= Convex hull of all incidence
vectors of feasible tours
To be investigated:
Dimension
Equation system defining the affine hull
Facets
Separation algorithms
Martin
Grötschel
68
The symmetric travelling salesman polytope
QTn : conv{ T Z E | T tour in K n }
{x R E | x( (i )) 2
( ijT 1 if ij T , else 0)
i V
x( E (W )) | W | 1 W V \ 1 ,3 | W | n 3
0 xij 1
ij E}
min cT x
x( (i )) 2
i V
x( E (W )) | W | 1 W V \ 1 ,3 | W | n 3
xij 0,1
ij E
The LP relaxation is solvable in polynomial time
Martin
Grötschel
69
Relation between IP and LP-relaxation
Open Problem:
If costs satisfy the triangle inequality, then
IP-OPT <= 4/3 LP-SEC
IP-OPT <= 3/2 LP-SEC (Wolsey)
Martin
Grötschel
70
General cutting plane theory:
Gomory Mixed-Integer Cut
Given y , x j ¢ and
,
y aij x j d d f , f 0
Rounding: Where aij aij f j , define
t y aij x j : f j f aij x j : f j f ¢
Then
f x
j
j
: f j f f j 1x j : f j f d t
Disjunction:
t d f j x j : f j f f
t d 1 f j x j : f j f 1 f
Combining
f
Martin
Grötschel
j
f x j : f j f 1 f j 1 f x j : f j f 1
71
clique trees
A clique tree is a connected graph C=(V,E), composed of
cliques satisfying the following properties
Martin
Grötschel
72
Polyhedral Theory of the TSP
Comb inequality
2-matching
constraint
handle
tooth
Martin
Grötschel
73
Clique Tree Inequalities
Martin
Grötschel
74
Clique Tree Inequalities
http://www.zib.de/groetschel/pubnew/paper/groetschelpulleyblank1986.pdf
h
t
h
x ( ( H )) x ( (T )) | H
i
j
i 1
j 1
h
t
i 1
h
x ( E ( H )) x ( E (T )) | H
i
i 1
j
j 1
Hi, i=1,…,h are the handles
Tj, j=1,…,t are the teeth
tj is the number of handles
that tooth Tj intersects
Martin
Grötschel
| h 2t
i
i 1
t
i
|
(| T
i 1
j
| t j )
t 1
2
75
Valid Inequalities for STSP
Martin
Grötschel
Trivial inequalities
Degree constraints
Subtour elimination constraints
2-matching constraints, comb inequalities
Clique tree inequalities (comb)
Bipartition inequalities (clique tree)
Path inequalities (comb)
Star inequalities (path)
Binested Inequalities (star, clique tree)
Ladder inequalities (2 handles, even # of teeth)
Domino inequalities
Hypohamiltonian, hypotraceable inequalities
etc.
76
A very special case
Petersen graph, G = (V, F),
the smallest hypohamiltonian graph
x( F ) 9 defines a facet of QT10
but not a facet of QTn , n 11
M. Grötschel & Y. Wakabayashi
Martin
Grötschel
77
Hypotraceable graphs and the STSP
On the right is the smallest
known hypotraceable graph
(Thomassen graph, 34 nodes).
Such graphs have no
hamiltonian path, but when
any node is deleted, the
remaining graph has a
hamiltonian path.
How do such graphs induce
inequalities valid for the
symmetric travelling salesman
polytope?
Martin
Grötschel
For further information see:
http://www.zib.de/groetschel/pubnew/paper/groetschel1980b.pdf
78
“Wild facets of the asymmetric
travelling salesman polytope”
Hypohamiltonian and hypotraceable directed graphs also exist and
induce facets of the polytopes associated with the asymmetric TSP.
Information “hypohamiltonian” and “hypotraceable” inequalities can
be found in
http://www.zib.de/groetschel/pubnew/paper/groetschelwakabayashi1981a.pdf
http://www.zib.de/groetschel/pubnew/paper/groetschelwakabayashi1981b.pdf
Martin
Grötschel
79
Valid and facet defining inequalities for
STSP: Survey articles
M. Grötschel, M. W. Padberg (1985 a, b)
M. Jünger, G. Reinelt, G. Rinaldi (1995)
D. Naddef (2002)
The TSP book (ABCC, 2006)
Martin
Grötschel
80
Counting Tours and Facets
Martin
Grötschel
n
# tours
# different facets
# facet classes
3
1
0
0
4
3
3
1
5
12
20
2
6
60
100
4
7
360
3,437
6
8
2520
194,187
24
9
20,160
42,104,442
192
10
181,440
>= 52,043,900,866
>=15,379
81
Separation Algorithms
Given a system of valid inequalities (possibly
of exponential size).
Is there a polynomial time algorithm (or a
good heuristic) that,
given a point,
checks whether the point satisfies all inequalities
of the system, and
if not, finds an inequality violated by the given
point?
Martin
Grötschel
82
Separation
K
Grötschel, Lovász, Schrijver (GLS):
“Separation and optimization
are polynomial time equivalent.”
Martin
Grötschel
83
Separation Algorithms
There has been great success in finding exact
polynomial time separation algorithms, e.g.,
for subtour-elimination constraints
for 2-matching constraints (Padberg&Rao, 1982)
or fast heuristic separation algorithms, e.g.,
for comb constraints
for clique tree inequalities
and these algorithms are practically efficient
Martin
Grötschel
84
Polyhedral Combinatorics
This line of research has resulted in
powerful cutting plane algorithms for
combinatorial optimization problems.
They are used in practice to solve
exactly or approximately (including
branch & bound) large-scale real-world
instances.
Martin
Grötschel
85
Deutschland
15,112
D. Applegate, R.Bixby,
V. Chvatal, W. Cook
15,112
cities
114,178,716
variables
2001
Martin
Grötschel
86
How do we solve a TSP like this?
Upper bound:
Lower bound:
Heuristic search
Linear programming
Chained Lin-Kernighan
Divide-and-conquer
Polyhedral combinatorics
Parallel computation
Algorithms & data structures
The LOWER BOUND is the mathematically and
algorithmically hard part of the work
Martin
Grötschel
87
Work on LP relaxations of the
symmetric travelling salesman polytope
QTn : conv{ T Z E | T tour in K n }
T
min c x
x( (i )) 2
i V
x( E (W )) | W | 1 W V \ 1 ,3 | W | n 3
0 xij 1
ij E
xij 0,1
ij E
Integer Programming Approach
Martin
Grötschel
88
cutting plane technique for integer and
mixed-integer programming
Feasible
integer
solutions
Objective
function
Convex
hull
LP-based
relaxation
Cutting
planes
Martin
Grötschel
89
Clique-tree cut for pcb442 from B. Cook
Martin
Grötschel
90
LP-based Branch & Bound
Root
Solve LP relaxation:
v=0.5 (fractional)
Upper Bound
G
A
P
Lower Bound
Integer
Infeas
Integer
Remark: GAP = 0 Proof of optimality
Martin
Grötschel
91
A Branching
Tree
Applegate
Bixby
Chvátal
Cook
Martin
Grötschel
92
Managing the LPs of the TSP
|V|(|V|-1)/2
Martin
Grötschel
Cuts: Separation
astronomical
CORE LP
Column generation: Pricing.
~ 3|V| variables
~1.5|V| constraints
93
Martin
Grötschel
A Pictorial History of Some
TSP World Records
Some TSP World Records
94
2006
pla 85,900
solved
3,646,412,050
variables
number of cities
2000x
increase
4,000,000
times
problem size
increase
in 52
years
2005
Martin
Grötschel
year
authors
# cities
# variables
1954
DFJ
42/49
820/1,146
1977
G
120
7,140
1987
PR
532
141,246
1988
GH
666
221,445
1991
PR
2,392
2,859,636
1992
ABCC
3,038
4,613,203
1994
ABCC
7,397
27,354,106
1998
ABCC
13,509
91,239,786
2001
ABCC
15,112
114,178,716
2004
ABCC
24,978
311,937,753
W. Cook, D. Epsinoza, M. Goycoolea
33,810
571,541,145
95
The current champions
ABCC stands for
D. Applegate, B. Bixby, W. Cook, V. Chvátal
almost 15 years of code development
presentation at ICM’98 in Berlin, see proceedings
have made their code CONCORDE available in
the Internet
Martin
Grötschel
96
USA 49
49 cities
1,146 variables
1954
G. Dantzig, D.R. Fulkerson, S. Johnson
Martin
Grötschel
97
West-Deutschland und Berlin
120 Städte
7140 Variable
1975/1977/1980
M. Grötschel
Martin
Grötschel
98
A tour around the world
666 cities
221,445 variables
1987/1991
M. Grötschel, O. Holland, see
Martin
Grötschel
http://www.zib.de/groetschel/pubnew/paper/groetschelholland1991.pdf
99
USA cities with population >500
13,509
cities
91,239,786
Variables
1998
D. Applegate, R.Bixby, V. Chvátal, W. Cook
Martin
Grötschel
100
usa13509: The branching tree
0.01%
initial gap
Martin
Grötschel
101
Summary: usa13509
9539 nodes branching tree
48 workstations (Digital Alphas, Intel
Pentium IIs, Pentium Pros, Sun
UntraSparcs)
Total CPU time:
Martin
Grötschel
4 cpu years
102
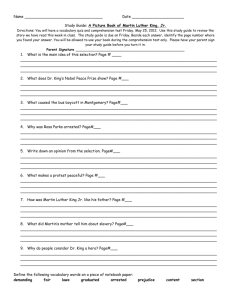
Overlay of
3 Optimal
Germany
tours
from
ABCC 2001
http://www.math.princeton.edu/
tsp/d15sol/dhistory.html
Martin
Grötschel
103
Optimal Tour of Sweden
311,937,753
variables
ABCC
plus
Keld Helsgaun
Roskilde Univ.
Denmark.
Martin
Grötschel
104
World Tour, current status
http://www.tsp.gatech.edu/world/
Martin
Grötschel
We give links to several images of the World TSP tour
of length 7,516,353,779 found by Keld Helsgaun in
December 2003. A lower bound provided by the
Concorde TSP code shows that this tour is at most
0.076% longer than an optimal tour through the
1,904,711 cities.
105
Vorlesungsplan
Kapitel 1. Das Travelling-Salesman- und verwandte Probleme: ein
Überblick und Anwendungen
1. Vorlesung: ppt-Überblick über das TSP, alte Folien und CookBook, Archäologie, Dantzig, Fulkerson und Johnson
Kapitel 2. Hamiltonsche und hypohamiltonsche Graphen und
Digraphen
2. Vorlesung: Hamiltonsche Graphen aus Bondy und Murty
3. Vorlesung: Hypohamiltonsche und Hypobegehbare Graphen
(Thomassen-Paper und Paper mit Yoshiko)
Kapitel 3. Die „natürlichen“ IP-Formulierungen des TSP und des
ATSP, Travelling Salesman-Polytope
Subtour-Formulierungen, STSP und ATSP-Polytop
Martin
Grötschel
Kapitel 4. Kombinatorische Verwandte des TSP
Das 1-Baum-, 2-Matching-, Zuordnungs-, 1-Arboreszenz-Problem
106
Vorlesungsplan
Kapitel 5. Gütegarantien für Heuristiken, Eröffnungsheuristiken für
das TSP (NN, Insert, Christofides,...)
Kapitel 6. Verbesserungsheuristiken und ein polynomiales
Approximationsschema (Exchange, LK, Helsgaun, Simulated
Annealing, evolutionäre Algorithmen,...)
Kapitel 7. Ein Branch&Bound-Verfahren für das ATSP
Assignment-B&B
Kapitel 8. 1-Bäume, Lagrange-Relaxierung und untere Schranken
durch ein Subgradientenverfahren (Held&Karp)
Kapitel 9. Alternative IP-Modelle
Kapitel 10. Das symmetrische TSP-Polytop
Kapitel 11. Schnittebenenerkennung/Separationsalgorithmen
Martin
Grötschel
107
Vorlesungsplan
Kapitel 12. Zur praktischen Lösung großer TSPs
Kapitel 13. TSPs mit Nebenbedingungen (Reihenfolgebedingungen,
Zeitfenster, Multi-Salesmen,...)
Unterwegs einbauen: Malen nach Zahlen, TSP-Portraits (Gesichter),
Knights-Problem im Schach, Routenplanung,...
Martin
Grötschel
The Travelling Salesman Problem
a brief survey
Martin Grötschel
Vorausschau auf die Vorlesung
Das Travelling-Salesman-Problem (ADM III)
The END
14. Oktober 2013
Martin Grötschel
Institute of Mathematics, Technische Universität Berlin (TUB)
DFG-Research Center “Mathematics for key technologies” (MATHEON)
Konrad-Zuse-Zentrum für Informationstechnik Berlin (ZIB)
groetschel@zib.de
http://www.zib.de/groetschel