C2000 Digital Power Supply
Workshop
Texas Instruments
Technical Training
D SP
TEXAS INSTRUMENTS
TECHNOLOGY
Copyright © 2008 Texas Instruments. All rights reserved.
Workshop Outline
1.
Introduction to Digital Power
Supply Design
2.
Driving the Power Stage with PWM
Waveforms
3.
Lab: Closed-Loop Control
Tuning the Loop for Good Transient
Response
5.
Lab: PWM Generation / Open-Loop Control
Controlling the Power Stage with
Feedback
4.
Lab: Exploring the Development Environment
Lab: Tuning the Loop
Summary and Conclusion
Workshop Outline
1.
Introduction to Digital Power
Supply Design
2.
Driving the Power Stage with PWM
Waveforms
3.
Lab: Closed-Loop Control
Tuning the Loop for Good Transient
Response
5.
Lab: PWM Generation / Open-Loop Control
Controlling the Power Stage with
Feedback
4.
Lab: Exploring the Development Environment
Lab: Tuning the Loop
Summary and Conclusion
Introduction to Digital Power Supply Design
What is a Digital Power Supply?
Why use Digital Control
Techniques?
Peripherals used for Digital Power
Supply Design
Development Tools and Software
What is Digital Power?
Generic Power System Block Diagram
Vin
Controller
(Compensator)
PWM
Switches
(FETs)
LC
Network
Vout
The controller block is what differentiates between a digital
power system and a conventional analog power system
Why Digital Control Techniques?
Controller
Analog
or
Digital ??
PWM
Sensor(s)
Analog Controller
+
Digital Controller
Insensitive to environment (temp, drift,…)
S/w programmable / flexible solution
Precise / predictable behavior
Advanced control possible (non-linear, multi-variable)
Can perform multiple loops and “other” functions
High bandwidth
High resolution
Easy to understand / use
Historically lower cost
Component drift and aging / unstable
Component tolerances
Hardwired / not flexible
Limited to classical control theory only
Large parts count for complex systems
Power Elec.
Bandwidth limitations (sampling loop)
PWM frequency and resolution limits
Numerical problems (quantization, rounding,…)
AD / DA boundary (resolution, speed, cost)
CPU performance limitations
Bias supplies, interface requirements
Benefits of Digital Control
Filter
Bridge
VI
Inrush/
Hot-plug
Control
V
PFC
DC/DC
VI
8
4
5
1
V
V
I
Multi-mode
Multi-mode
Power control
control
Power
Interface
Circuit
Monitor
MCU
MCU
(MCU)
(MCU?)
Output
Traditional Analog
Power Supply
DC/DC
Current/Load
DC/DC
Current/Load
Converter
Sharing
Converter
Sharing
Control
Control
Control
Control
PFC Control
I
Supervisory
Supervisory
Housekeeping
Housekeeping
Circuits
Circuits
Multiple chips for
control
Micro-controller for
supervisory
Dedicated design
To Host
Aux P/S
Eliminate Components
Filter
Bridge
V
PFC
DC/DC
V
Output
Reduce Manufacturing Cost
Better Performance Across Corners
One Design, Multiple Supplies
Failure Prediction
Aux P/S
Digital controller enables multi-threaded applications
One Device, Multiple DC Outputs
Variable DC Output
Analog Control System
R
+
“Analog Computation”
Differential equations
e
-
C
P
(controller)
(plant)
Y
C
C2
C1
R
R
R2
R
R1
C ( s)
R2 1 R1C1s
R1 1 R2C2 s
Need to find:
R1, R2, C1, C2
Energy
Storage
Elements
L
d 3 y (t )
d 2 y (t )
dy (t )
k
k
k 0y (t ) f (t )
2
1
3
2
dt
dt
dt
Differential equations
1st, 2nd, 3rd,…order
Laplace Transform
Digital Control System
R
+
E
-
Cd
U
(controller)
D-A
P
ZOH
(plant)
Y
A-D
S&H
Difference equation
C
U (n) a2 U (n 2) a1 U (n 1)
R
b2 E (n 2) b1 E (n 1) b0 E (n)
L
where E (n) R (n) Y (n)
Need to find:
a1, a2, b0, b1, b2
Energy
Storage
Elements
d 3 y (t )
d 2 y (t )
dy (t )
k
k
k 0y (t ) f (t )
2
1
3
2
dt
dt
dt
Differential equations
1st, 2nd, 3rd,…order
OR
Laplace Transform
Z Transform
Time Sampled Systems
Digital Processor
+
A-D
Control
Law
D-A
Ref
y(t)
y(n)
t
Continuous
time signal
sample
period
T
t
Discrete
time signal
u(n)
u(t)
t
t
Processor Bandwidth
y(n)
TSAMPLE
t
Processor
Control Code
Sample Freq (=PWM)
(kHz)
100
300
500
700
1000
1500
2000
Control Code
Sample Period
(ns)
10000
3333
2000
1429
1000
667
500
Control
Time Division Multiplexing (TDM)
y(n)
TSAMPLE
t
Processor 1
Control Code (C1)
Processor 2 Control Code (C2)
Processor 3
Single CPU
Control Code (C3)
C1
C2
C3
Control Code
Control Code
Control
Control Code
C1
C2
Control
Control
C3
C1
C2
C3
Digitally Controlled Power Supply
DAC
DSC
(PWM)
ADC
0110101100
1011011101
0010100111
“High fidelity”
Translation boundary
“Plant”
System Mapping
PFC – 3ph Interleaved
F280xx
DSP
32 bit core
60~100
MHz
Vin
ADC
12 bit
(80nS)
VOUT
Ch1
Ch2
Ch16
1A
ePWM1
1B
Phase-Shifted Full Bridge
2A
ePWM2
2B
3A
ePWM3
3B
8A
ePWM8
8B
VIN
VOUT
TMS320F280x
High Performance DSP (C28x
Code security
64Kw Flash
+ 1Kw OTP
18Kw
RAM
4Kw
Boot
ROM
ePWM
eCAP
Memory Bus
100 MIPs C28xTM 32-bit DSP
32x32-bit
Multiplier
RMW
Atomic
ALU
32-bit
Timers (3)
Real-Time
JTAG
Peripheral Bus
Interrupt Management
eQEP
12-bit ADC
Watchdog
Core)
100MIPS performance
Single cycle 32 x32-bit MAC (or dual 16 x16 MAC)
Very Fast Interrupt Response
Single cycle read-modified-write
Memory Sub-System
Fast program execution out of both RAM and
Flash memory
85 MIPS with Flash Acceleration Technology
100 MIPS out of RAM for time-critical code
Control Peripherals
CAN 2.0 B
I2C
SCI
32-bit
Register
File
TM
SPI
Up to 6 ePWM, 4 eCAP, and 2 eQEP
Ultra-Fast 12-bit ADC
6.25 MSPS throughput
Dual sample&holds enable simultaneous sampling
Auto Sequencer, up to 16 conversions w/o CPU
Communications Ports
GPIO
Multiple standard communication ports provide
simple interfaces to other components
Datasheet available at: http://www-s.ti.com/sc/ds/tms320f2808.pdf
Efficient 32-bit Processor Capability
Interrupt Management
TM
C28x
32x32 bit
Multiplier
32-bit DSP
RMW
Atomic
ALU
32-bit
Timers (3)
Real-Time
JTAG
32-bit
Register
File
# Instructions vs PWM
PWM freq. PWM per. Processor MIPS
(kHz)
(s)
100
150
50
20.0
2000
3000
100
10.0
1000
1500
200
5.0
500
750
250
4.0
400
600
300
3.3
333
500
500
2.0
200
300
750
1.3
133
200
1000
1.0
100
150
MIPS = Million Instruction Per Second
C28xTM DSP Core
Single-cycle 32-bit multiplier makes
computationally intensive control
algorithms more efficient
Three 32-bit timers support multiple
control loops / time bases
Single cycle read-modified-write in any
memory location and 32-bit registers
improve control algorithm efficiency
Real-time JTAG debug shortens
development cycle
Fast & flexible interrupt management
significantly reduce interrupt latency
TPWM
PWM
CPU
Control Code spare Control Code spare
Control
ePWM “DAC” Capability
ePWM
Counter
Compare
Action
Qualifier
Time-Base
Control Peripherals
Event
Trig.
& Int.
Trip
Zone
Dead
Band
PWM
Chop
EPWMxA
EPWMxB
PWM effective resolution (CPU=100MHz)
PWM
(kHz)
50
100
150
250
500
750
1000
Standard PWM
bits
%
11.0
0.05
10.0
0.10
9.4
0.15
8.6
0.25
7.6
0.50
7.1
0.75
6.6
1.00
HR-PWM
bits
%
17.0
0.0007
16.0
0.0015
15.4
0.0022
14.7
0.0037
13.7
0.0075
13.1
0.0112
12.7
0.0150
ePWM
Number of channels scalable
and resources allocated per
channel
Two independent PWM outputs
per module
Dedicated time-base timer
Two independent compare
registers
Multi-event driven waveform
Trip zones and event interrupts
F2808 offers 6 modules
Provides ePWM DAC capability
for DPS
Switching can be programmed
as Asymmetric or Symmetric
PWM
High-Resolution PWM mode
12-bit ADC Capability
ADC
Prescaler
8 ADC
Inputs
8 ADC
Inputs
Analog
MUX
Analog
MUX
S/H
A
S/H
B
Start of
Conversion
12-bit
ADC
Module
SYSCLK
Result
Registers
16 words
Auto Sequencer
Control Peripherals
Fast & Flexible
12-bit 16-Channel ADC
12.5 MSPS throughput
Dual sample/hold enable
simultaneous sampling or
sequencing sampling modes
Analog input: 0V to 3V
16 channel, multiplexed inputs
ADC Utilization:
# Channels (“Loops”) vs. PWM frequency
MSPS = 3
PWM
# Channels
(kHz)
125
24
250
12
500
6
750
4
1000
3
MSPS = 6.25
PWM
# Channels
(kHz)
125
50
250
25
500
13
750
8
1000
6
Auto Sequencer supports up to 16
conversions without CPU
intervention
Sequencer can be operated as two
independent 8-state sequencers or
as one large 16-state sequencer
Sixteen result registers (individually
addressable) to store conversion
values
Code Composer Studio
Menus or Icons
Help
CPU
Window
Project Manager:
Source & object files
File dependencies
Compiler, Assembler &
Linker build options
Full C/C++ & Assembly
Debugging:
C & ASM Source
Mixed mode
Disassembly (patch)
Set Break Points
Set Probe Points
Editor:
Structure Expansion
Status
Window
Watch Window
Graph
Window
Memory Window
Software Library Approach
CNTL
2P2Z
CNTL
3P3Z
Ref
Ref
Uout
FB
Control 2-pole / 2-zero
FB
Buck
Single
DRV
E
P
W
M
Duty
H
W
HR
Buck
Single
DRV
Uout
Control 3-pole / 3-zero
EPWMnA
Buck Single Output
IIR-FILT
2P2Z
IIR-FILT
3P3Z
f
In
Out
2nd order IIR filter
MPIL
DRV
f
In
E
P
W
M
Out
3rd order IIR filter
EPWM1A
EPWM1B
EPWM2A
Freq
Out
Offset
Sine Wave generator
HHB
DRV
Gain
Out
Offset
Duty
High precision Sine Gen
INV
SQR
Out
Inverse Square function
Duty
E
P
W
M
H
W
EPWMnA
EPWMnB
Power Factor 2-phase
Interleaved
IBM
FB
DRV
E
P
W
M
H
W
EPWMnA
In
EPWMnB
DelLL
DelRL
Half H-Bridge
PSFB
DRV
Delay
Slope
E
P
W
M
Phase
Out
Target
Soft Start and Sequencing
E
P
W
M
H
W
EPWMnA
EPWMnB
EPWM(n+1)A
EPWM(n+1)B
IBM method Full Bridge
SSartSEQ
In
EPWMnA
SGenHP1
Freq
Gain
PFC
2PHIL
DRV
Adj
H
W
Multi-Phase Interleaved
SinGen1
H
W
High Resolution Buck
EPWM2B
Duty
Duty
E
P
W
M
Llegdb
Rlegdb
H
W
EPWMnA
EPWMnB
ADC
DRV
EPWM(n+1)A
EPWM(n+1)B
Phase Shifted Full Bridge
Rslt
A
D
C
Ch0
Ch1
Ch3
Ch4
H
W
Analog-Digital Converter driver
Modular Software Architecture
“Signal Net” based module connectivity
Net1
Net2
In1A
f1
Out1
In1B
Net6
f2
Net3
In2A
In3A
Net7
In4A
In4B
f4
Out4
Net8
In4C
f5
Out2
f3
Net4
Net5
In5A
Out5
Net9
Out3
Initialization time
// pointer & Net declarations
Int *In1A, *In1B, *Out1, *In2A,...
Int Net1, Net2, Net3, Net4,...
// “connect” the modules
In1A=&Net1; In1B=&Net2; In2A=&Net3; In3A=&Net4; // inputs
Out4=&Net8; Out5=&Net9;
// outputs
Out1=&Net5; In4A=&Net5;
// Net5
Out2=&Net6; In4B=&Net6;
// Net6
Out3=&Net7; In4C=&Net7; In5A=&Net7;
// Net7
Run time - ISR
; Execute the code
f1
f2
f3
f4
f5
Peripheral Drivers
CPU dependency only:
• Math / algorithms
• Per-Unit math (0-100%)
• Independent of Hardware
Vref
(Q15)
BUCK
DRV
CNTL
2P2Z
Ref
Fdbk
Out
Duty
(Q15)
Vout
(Q15)
// pointer & Net declarations
int *CNTL_Ref1, *CNTL_Fdbk1, *CNTL_Out1;
int *BUCK_In1, *ADC_Rslt1;
int Vref, Duty, Vout;
// “connect” the modules
CNTL_Ref1 = &Vref;
CNTL_Out1 = &Duty; BUCK_In1 = &Duty;
CNTL_Fdbk1 = &Vout; ADC_Rslt1 = &Vout;
In
ADC
SEQ1
DRV
Rslt0
Depends on:
• PWM frequency
• System clock frequency
E
P
W
M
H
W
A
D
C
H
W
EPWM1A
ADC_A0
ADC_A1
ADC_A2
ADC_A3
Depends on:
• # ADC bits (10 / 12 ?)
• Unipolar, Bipolar ?
• Offset ?
Dual Buck Example
BG
ISR
Start / Stop trigger
Voltage
Controller
S-start / SEQ
Vref1
BUCK
DRV
CNTL
2P2Z
Ref
Uout
DutyCmd1
FB
Duty
Single Power Stage
E
P
W
M
H
W
Vin
EPWM1A
Vout1
DRV
Buck
400 kHz
400 kHz
ADC
DRV
Vout1
rslt0
A
D
C
H
W
Ch0
400 kHz
Voltage
Controller
S-start / SEQ
Vref2
BUCK
DRV
CNTL
2P2Z
Ref
Uout
DutyCmd2
FB
Duty
Single Power Stage
E
P
W
M
H
W
Vin
EPWM2A
400 kHz
400 kHz
ADC
DRV
Vout2
rslt0
400 kHz
A
D
C
H
W
Ch1
Vout2
DRV
Buck
Software Block Execution
BG
ISR
(400 kHz)
SStartSeq
Context Save
Comms
ADC_DRV(1)
CNTL_2P2Z(1)
Loop-1
BUCK_DRV(1)
ISR body
ADC_DRV(2)
Other....
CNTL_2P2Z(2)
Loop-2
BUCK_DRV(2)
Context
Restore
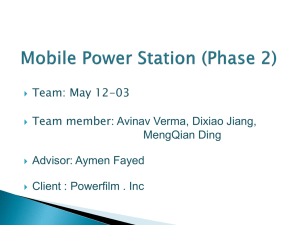
Lab1: Exploring the Development Environment
Navigate CCS features
Understand DPS library structure
Generate and visualize PWM waveforms
TI PowerTrain
PTD08A010W
10A module
Current meas.
Temp meas
Over Current Prot.
Over Current Flag
No Heat-sink needed
controlCard 2808
SW1
Phase Links
Active
Load LEDs
Volt
Meter
Workshop Outline
1.
Introduction to Digital Power
Supply Design
2.
Driving the Power Stage with PWM
Waveforms
3.
Lab: Closed-Loop Control
Tuning the Loop for Good Transient
Response
5.
Lab: PWM Generation / Open-Loop Control
Controlling the Power Stage with
Feedback
4.
Lab: Exploring the Development Environment
Lab: Tuning the Loop
Summary and Conclusion
Driving the Power Stage with PWM Waveforms
Open-Loop System Block Diagram
Generating PWM using the ePWM
Module
Power Stage Topologies and Software
Library Support
Simple Open-Loop Diagram
Watch Window
Duty1
Duty1
HR
BUCK
DRV
E
P
W
M
In
H
W
ADC
1CH
DRV
A
D
C
Single Power Stage
Vin1
EPWMnA
Duty2
Duty3
Duty1
slider
Vfdbk
Vout1
Rslt
H
W
Ch0
DRV
Vout1
Buck
Scaleable PWM Peripherals
Each peripheral module has the same structure
xSYNCI
SYNCI
EPWM1INTn
EPWM1SOC
EPWM1
Module
EPWM1AO
Resources allocated on a per channel basis
EPWM1BO
Each channel (module) supports 2
independent PWM outputs (A&B)
SYNCO
xSYNCO
# Channels easily scaleable – software reuse
SYNCI
EPWM2INTn
PIE
EPWM2SOC
EPWM2
Module
Time-base synch feature for all channels
EPWM2AO
EPWM2BO
GPIO
Mux
6 modules (12 PWM outputs) on F2808
Key features:
SYNCO
Phase & edge control
New counting modes
SYNCI
EPWM6INTn
EPWM6SOC
EPWM6
Module
EPWM6AO
Independent deadband
EPWM6BO
Flexible trip-zones
TZ1n to TZ6n
SOC
SYNCO
xSOC
ADC
VBus32
to ECAP1 module (sync in)
High frequency chopper mode
ePWM Module Block Diagram
Time-Base (TB)
TBPRD Shadow (16)
CTR=ZERO
TBPRD Active (16)
CTR=CMPB
Sync
In/Out
Select
Mux
Disabled
S0
EPWMxSYNCO
S1
CTR=PRD
TBCTL[SYNCOSEL]
16
EPWMxSYNCI
Counter
UP / DWN
(16 bit)
TBCNT
Active (16)
TBCTL[SWFSYNC]
(software forced sync)
TBCTL[CNTLDE]
CTR=ZERO
CTR_Dir
16
TBPHS Active (16)
Phase
Control
CTR=PRD
EPWMxINTn
CTR=ZERO
CTR=CMPA
Counter Compare (CC)
CTR=CMPB
Event
Trigger &
Interrupt
(ET)
EPWMxSOCA
EPWMxSOCB
CTR_Dir
16
CTR=CMPA
Action
Qualifier
(AQ)
16
CMPA Shadow (16)
16
EPWMxAO
EPWMA
CMPA Active (16)
Dead
Band
(DB)
PWM
Chopper
(PC)
Trip
Zone
(TZ)
CTR=CMPB
EPWMxBO
EPWMB
16
CMPB Active (16)
CMPB Shadow (16)
EPWMxTZINTn
TZ1n to TZ6n
CTR=ZERO
Module Sync and Phase Control
TBCTR
FFFFh
Master Module
Ext Sync In
(optional)
Master
Phase Reg
En
SyncIn
600
600
TBPRD
EPWM1A
CNT=Zero
CNT=CMPB
EPWM1B
X
1
0000
CTR=Zero
(SycnOut)
SyncOut
time
TBCTR
2
FFFFh
Phase = 120o
Slave Module
Slave
Phase Reg
En
12
SyncIn
EPWM2A
EPWM2B
CNT=CMPB
2
200
TBPHS
CNT=Zero
X
600
600
TBPRD
200
0000
SyncOut
SyncIn
time
Action Qualifier Module (AQ)
Key Features
TBCTR = Period
Multi event driven waveform generator
Events drive outputs A and B independently.
Full control on waveform polarity
Full transparency on waveform construction
S/W forcing events supported
All events can generate interrupts & ADC SOC
EPWMA
Action
Qualifier
Module
(AQ)
TBCTR = Zero
TBCTR = Compare A
TBCTR = Compare B
EPWMB
SW force
TBCTR Direction
Events
Zero
Actions
Nothing
Clear Lo
Set Hi
Toggle
Z
Z
Z
Z
T
(ZRO)
TBCTR
(Up)
equals:
CMPA
CA
CA
CA
CMPB
CB
CB
CB
P
P
P
CMPA
CA
CA
CA
P
CB
CB
CB
CB
T
(CBd)
S/W force
CA
T
(CAd)
CMPB
CBu
CMPB
SW
SW
SW
SW
T
CAu
CMPA
T
(PRD)
TBCTR
(Down)
equals:
CB
PRD
Period
T
(CBu)
Period
CA
T
(CAu)
TBCTR
ZRO
Zero
CBd
CAd
Simple Waveform Construction
TBCTR
TBPRD
value
Z
P
CB
CA
Z
P
CB
CA
Z
P
Z
P
CB
CA
Z
P
CB
CA
Z
P
EPWMA
EPWMB
TBCTR
TBPRD
value
CA
CB
CA
CB
EPWMA
EPWMB
Z
Z
Z
T
T
T
Fault Management Support
Vin
‘2808
EPWM1A
Iin
EPWM2A
TZ1
CL2
TZ3
CL1
EPWM1B
EPWM2B
ECAP1
Iin
EPWM1A
Buck #1
I1
HiZ
I2
ShutDown
TZ2
Vout1
I1
IsetCL1
Vout2
Action on
Fault
EPWM2A
Buck #2
I2
HiZ
IsetCL2
IsetSD
IsetSD
Iin
Trip Zones:
I1
IsetCL1
6 independent zones (TZ1~TZ6)
I2
IsetCL2
Force High, Low or HiZ on trip
One-time trip catastrophic failure
EPWM1A
Cycle-by-cycle current limit mode
TZ1~TZ6 can trigger interrupt
EPWM2A
Multi-Phase Interleaved (MPI)
Ext Sync In
(optional)
Master
Phase Reg
En
SyncIn
EPWM1A
CNT=Zero
CNT=CMPB
EPWM1B
X
1
Vin
SyncOut
EPWM1A
EPWM2A
EPWM3A
Slave
Phase Reg
En
SyncIn
12
EPWM2A
CNT=Zero
EPWM2B
CNT=CMPB
X
2
Vout
SyncOut
EPWM1B
Slave
Phase Reg
En
SyncIn
2
EPWM3A
CNT=Zero
CNT=CMPB
3
X
EPWM3B
SyncOut
EPWM2B
EPWM3B
Switching Requirements – MPI
P
P
P
I
I
I
P
CA
P
CB
CA
P
A
• Asymmetrical PWM case
• Complementary output
generated by dead-band unit
• CMPB triggers ADC SOC
Pulse Center
INIT-time
EPWM1A
212
P
CA
P
CB
CA
A
EPWM2A
2
• Period (1,2,3)
• CAu Action (1,2,3)
• PRD Action (1,2,3)
• Phase (2,3)
• PRD Interrupt (1)
• CBu ADC SOC (1,2,3)
• Dead-band
RUN-time
CB
A
CA
EPWM3A
P
CA
P
• CMPA (1,2,3)
• CMPB (1,2,3)
Half H-Bridge (HHB)
VDC_bus
Ext Sync In
(optional)
Master
Phase Reg
En
EPWM1A
SyncIn
EPWM1A
CNT=Zero
CNT=CMPB
1
X
EPWM1B
SyncOut
EPWM1B
VOUT
Switching Requirements – HHB
CMPA
modulation
range
CA
CB
CMPA
modulation
range
Z
CA
• Up/Down Count
• Asymmetrical PWM
• dead-band on A only
• 50 % max Modulation
(controlled by CMPA)
Z
A
EPWM1B
Z
CB
CA
Z
A
EPWM1A
DBRED
DBRED
CA
INIT-time
• ZRO Action (A,B)
• CAd Action
• CAu Action
• CBd ADC trigger
• CBd ADC trigger
• DBRED
Compare A modulation range:
0 < CMPA < ( PRD – ½ x DBRED )
RUN-time
• CMPA
• CMPB (optional)
Phase Shifted Full Bridge (PSFB)
Ext Sync In
(optional)
Master
Phase Reg
En
VOUT
SyncIn
EPWM1A
CNT=Zero
CNT=CMPB
EPWM1B
X
1
VDC_bus
EPWM1A
EPWM2A
EPWM1B
EPWM2B
SyncOut
Slave
Phase Reg
En
SyncIn
Var
EPWM2A
CNT=Zero
EPWM2B
CNT=CMPB
2
X
SyncOut
Switching Requirements – PSFB
Z
Z
Z
I
I
I
Z
CB
CA
Z
A
CB
CA
• Asymmetrical PWM
• Using dead-band module
• Phase (Φ) is the control variable
• Duty fixed at ~ 50%
• RED / FED control ZVS trans.
i.e. via resonance
• CMPB can trigger ADC SOC
Z
A
EPWM1A
RED
ZVS
transition
Power
Phase
EPWM1B
FED
ZVS
transition
2variable
Z
CB CA
Z
CB CA
A
EPWM2A
EPWM2B
Z
A
RED
Power
Phase
FED
INIT-time
• Period (1,2)
• CMPA (1,2) ~ 50%
• CAu action (1,2)
• ZRO action (1,2)
• CBu trigger for ADC SOC
RUN-time
• Phase (2) – every cycle
• FED / RED (1,2) – slow loop
Software Driver Module – PSFB
50% duty
PSFB
DRV
Net1
phase
Net2
llegdb
Net3
rlegdb
E
P
W
M
H
W
EPWM1A
EPWM1B
EPWM1A
EPWM2A
llegdb
Left leg
dead-band
EPWM2B
EPWM1B
Power
Phase
llegdb
2phase
VOUT
VDC_bus
EPWM1A
EPWM2A
EPWM2A
rlegdb
right leg
dead-band
EPWM1B
“Left leg”
EPWM2B
“Right leg”
EPWM2B
Power
Phase
rlegdb
Software Driver Module – PFC2PHIL
PFC
2PHIL
DRV
Net1
Duty
Net2
Adj
E
P
W
M
EPWM1A
H
W
EPWM1B
+/Adj
EPWM1A
VDC_bus
+/Adj
EPWM1B
EPWM1A
EPWM1B
1
Lab2: PWM Generation / Open-Loop Control
Control Buck output voltage using simple PWM
duty cycle adjustment without feedback
Use CCS watch window and slider button features
to conveniently adjust PWM duty cycle
Watch Window
Duty1
Duty1
Buck
Single
DRV
E
P
W
M
In
H
W
Buck
Single
DRV
E
P
W
M
In
H
W
Vin
EPWM-1A
Buck-1
Vout1
Buck-2
Vout2
DRV
Duty2
Duty1
Watch Window
EPWM-2A
DRV
Vout1
Duty1
slider
Duty2
slider
Vout2
Temp1
Temp2
Iout1
Iout2
Vin
ADC
Casc
Seq
CNF
A
D
C
H
W
Vout1
Vout2
Temp1
Temp2
Iout1
Iout2
Vin
Workshop Outline
1.
Introduction to Digital Power
Supply Design
2.
Driving the Power Stage with PWM
Waveforms
3.
Lab: Closed-Loop Control
Tuning the Loop for Good Transient
Response
5.
Lab: PWM Generation / Open-Loop Control
Controlling the Power Stage with
Feedback
4.
Lab: Exploring the Development Environment
Lab: Tuning the Loop
Summary and Conclusion
Controlling the Power Stage with Feedback
Closed-Loop System Block Diagram
Analog-to-Digital Converter Module
Digital Control of Power Converter
High Resolution PWM Benefits
Soft Start – Starting the Loop
The “Closed-Loop”
Control
“2P2Z”
Vset
Ref
FB
Uout
“PWM”
DRV
E
P
W
M
In
H
W
Duty
Vin
Power
Stage
“Loop”
Feedback
“ADC”
DRV
A
D
C
Rslt
H
W
Vout
ADC Module Block Diagram
Analog MUX
...
MUX
A
ADCINA7
ADCINB0
ADCINB1
Result MUX
S/H
A
S/H
MUX
...
MUX
B
ADCINB7
S/H
B
12-bit A/D
Converter
SOC
EOC
Autosequencer
MAX_CONV1
(GPIO/XINT2_ADCSOC)
Ch Sel (CONV00)
Ch Sel (CONV01)
Ch Sel (CONV02)
Ch Sel (CONV03)
...
Software
ePWM_SOC_A
ePWM_SOC_B
External Pin
RESULT0
RESULT1
Ch Sel (CONV15)
Start Sequence
Trigger
RESULT2
Result
Select
...
ADCINA0
ADCINA1
RESULT15
Digital Control of Power Converter
Vc
Vo
Power Converter
Vin
C
RL
Vref _ adc
Vo max Kd
D
Kd
Vs
PWM
Digital
Controller
U(n)
ADC
Gc(z)
E(n)
+
Vr
+
U ( z ) B0 B1 z 1 B2 z 2
Gc ( z )
E ( z ) 1 A1 z 1 A2 z 2
U (n) B0 E (n) B1E (n 1) B2 E (n 2) A1U (n 1) A2U (n 2)
Digital Control of Power Converter
Steady State Limit Cycle
Vo levels (DPWM duty
ADC levels
ratio steps)
Volt
Vc
Vref
Vs
Vs
Vc
steady state output,
limit cycle
Volt
Vref
Vo levels (DPWM duty ADC levels
ratio steps)
Vc
Vs
Vs
error bins
+0010
+0001
0000
-0001
time
error bins
+0010
+0001
0000
-0001
steady state output,
no limit cycle
time
High Frequency PWM
V
TPWM
PWM
TSysclk
VSTEP
t
t
PWM resolution = Log2 ( TPWM / TSysClk )
F2808 – SysClk = 100 MHz
PWM Freq
(kHz)
100
150
250
500
750
1000
1500
2000
Regular resolution
(bits)
(%)
10.0
0.1
9.4
0.2
8.6
0.3
7.6
0.5
7.1
0.8
6.6
1.0
6.1
1.5
5.6
2.0
High resolution
(bits)
(%)
16.0
0.002
15.4
0.002
14.7
0.004
13.7
0.008
13.1
0.011
12.7
0.015
12.1
0.023
11.7
0.030
High Resolution PWM (HRPWM)
PWM Period
Regular
PWM Step
(i.e. 10ns)
Device Clock
(i.e. 100MHz)
HRPWM divides a clock
cycle into smaller steps
called Micro Steps
(Step Size ~= 150ps)
ms
ms
ms
ms
Calibration Logic
ms
ms
Calibration Logic tracks the
number of Micro Steps per
clock to account for
variations caused by
Temp/Volt/Process
HRPWM
Micro Step (~150ps)
Significantly increases the resolution of conventionally derived digital PWM
Uses 8-bit extensions to Compare registers (CMPxHR) and Phase register
(TBPHSHR) for edge positioning control
Typically used when PWM resolution falls below ~9-10 bits which occurs at
frequencies greater than ~200 kHz (with system clock of 100 MHz)
Not all ePWM outputs support HRPWM feature (see device data manual)
Resolution Loss – Low Duty Utilization
TPWM
Max Duty
PWM
Not Utilized
t
TSYSCL (10 ns)
0.8
1
1.2
1.8
2.5
3.3
5
94%
93%
92%
91%
90%
89%
87%
93%
92%
90%
89%
88%
86%
83%
91%
90%
88%
87%
85%
83%
80%
87%
85%
82%
80%
78%
74%
70%
82%
79%
75%
72%
69%
64%
58%
76%
73%
67%
63%
59%
53%
45%
64%
58%
50%
44%
38%
29%
17%
Vin
14
12
10
9
8
7
6
Benefit of High Resolution PWM
Watch Window
Vref
HR
BUCK
DRV
Voltage
Controller
Vref
CNTL
2P2Z
Ref
FB
Uout
DutyCmd
Duty
Single Power Stage
E
P
W
M
H
W
Vin1
EPWMnA
DRV
Vout1
Buck
1 MHz
DutyCmd
1 MHz
ADC
1CH
DRV
Vout
rslt0
A
D
C
H
W
Ch0
1 MHz
HiRes PWM (150ps)
Regular PWM (10ns)
Limit cycle problem
No Limit cycle
Edge control is precise
Edge jumps around
Managing the “Closed-Loop”
Fault
Trip
Dead
Band
SSartSEQ
Delay
Slope
Out
Target
Coeff set 3
Coeff set 2
Coeff
- B2 set 1
Coeff
Coeff - B2
CoeffCoeff
- B1 - B2
Coeff - B1
CoeffCoeff
- B0 - B1
Coeff - B0
CoeffCoeff
- A2 - B0
Coeff - A2
CoeffCoeff
- A1 - A2
Coeff - A1
Coeff - A1
Vset
Control
“2P2Z”
Ref
FB
Duty
Clamp
“PWM”
DRV
E
P
W
M
In
H
W
“ADC”
DRV
A
D
C
Rslt
H
W
Duty
Uout
Open/Closed
Loop
Feedback
Simple User Interface Control
Supervisory - BG
Control Engine(s)
Fault Trip
Dead Band
Open/Closed Loop
Trip
Zone
Duty Clamp
Vset
SSartSEQ
Control
“2P2Z”
Delay
Slope
Out
Target
Coeficient
Tuning
Coeff set 3
Coeff set 2
CoeffCoeff
- B2 set 1
Coeff - B2
CoeffCoeff
- B1 - B2
Coeff - B1
CoeffCoeff
- B0 - B1
Coeff - B0
CoeffCoeff
- A2 - B0
Coeff - A2
CoeffCoeff
- A1 - A2
Coeff - A1
Coeff - A1
Vout Monitor
Duty Monitor
Ref
FB
“PWM”
DRV
E
P
W
M
In
H
W
“ADC”
DRV
A
D
C
Rslt
H
W
Duty
Uout
Voltage
Feedback
Soft-Start and Sequencing Multi Vout
Lab3: Closed-Loop Control
Regulate the Buck output by using Voltage Mode Control (VMC) with
closed-loop feedback
Soft-start and sequencing function used to ensure an “orderly”
voltage ramp-up/down
Soft-start profile and target voltage is conveniently adjusted by using
the CCS watch window and slider buttons feature
SStartSEQ
HR
BUCK
DRV
Voltage
Controller
CNTL
2P2Z
Delay
Slope
Out
Vref
Target
Ref
Uout
Duty1
Duty
Single Power Stage
E
P
W
M
H
W
Vin1
EPWMnA
FB
ADC
1CH
DRV
Watch Window
Vout1
rslt0
A
D
C
H
W
Ch0
Vsoft
Graph Window
SlewRate
DataLog
OnDelay
Mem
Buffer
Vsoft
slider
In
DRV
Vout1
Buck
Workshop Outline
1.
Introduction to Digital Power
Supply Design
2.
Driving the Power Stage with PWM
Waveforms
3.
Lab: Closed-Loop Control
Tuning the Loop for Good Transient
Response
5.
Lab: PWM Generation / Open-Loop Control
Controlling the Power Stage with
Feedback
4.
Lab: Exploring the Development Environment
Lab: Tuning the Loop
Summary and Conclusion
Tuning the Loop for Good Transient Response
Digital Power Supply Control Theory
Intuitive Loop Tuning – “Visually
without Math”
Active Load Feature of the Power EVM
Multi-Loop Control
The Digital Control System
Digital Processor
G(s)
r(t)
+
e(kT)
Controller
u(kT)
DAC
Actuator
Process
D(z)
ADC
Sensor
Advantages
Considerations
• Immunity from environmental effects
• Advanced control strategies possible
• Immunity from component errors
• Improved noise immunity
• Ability to modify and store control parameters
• Ability to implement digital communications
• System fault monitoring and diagnosis
• Data logging capability
• Ability to perform automated calibration
• Sample rate
• Quantization
• Ease of programming
• Controller design
• Cost
• Processor selection
• Requires data converters
• Numeric issues
c(t)
PID Control Review
u(t ) K e(t ) K e(t ).dt K de(t )
P
I
D dt
Gc(s)
KP = Proportional gain
KI = Integral gain
KD = Derivative gain
KP
K
G ( s) K I K s
P s
D
C
K
I
e(t)
e.dt
+
K
D
de
dt
u(t)
Usually written in “parallel” form:
G (s) K 1 1 T s
C
C T s d
i
KP = K C
KI = KC/Ti
KD = KCTd
Proportional term controls loop gain
Integral action increases low frequency gain and
reduces/eliminates steady state errors
Derivative action adds phase lead which improves
stability and increases system bandwidth
Tuning the Step Response
Performance of the control loop can be determined from the
output response to a change in load
Acceptable response might be specified in terms of...
Peak overshoot
Time to settle to within specified error band
We will adjust PID coefficients to optimise our digital controller
Loop Tuning – Good First Step
U (n) B0 E (n) B1E (n 1) B2 E (n 2) A1U (n 1) A2U (n 2)
E(n-1)
Z-1
E(n)
B0
X
E(n-2)
Z-1
B1
X
B2
U(n)
Σ
A2
X
A1
U(n-2)
X
X
Z-1
Z-1
U(n-1)
PRD-SF
X
Duty
PID – Intuitive / Interactive
We can also write the controller in transfer function form:
U(z)
B0 + B1*z-1 + B2*z-2
B0z2 + B1*z + B2
------ = ------------------------- = ---------------------E(z)
1 - z-1
z2 – z
Compare with the General 2P2Z transfer function:
U(z)
B0 + B1*z-1 + B2*z-2
B0z2 + B1*z + B2
------ = --------------------------- = ---------------------E(z)
1 + A1*z-1 + A2*z-2
z2 + A1*z + A2
We can see that PID is nothing but a special case of 2P2Z control where:
A1 = -1
and
A2 = 0
Change PID coeff. “on fly” in back-ground loop
// Coefficient init
Coef2P2Z_1[0] = Dgain * 67108;
Coef2P2Z_1[1] = (Igain - Pgain - Dgain - Dgain)*67108;
Coef2P2Z_1[2] = (Pgain + Igain + Dgain)*67108;
Coef2P2Z_1[3] = 0;
Coef2P2Z_1[4] = 67108864;
Coef2P2Z_1[5] = Dmax[1] * 67108;
Coef2P2Z_1[6] = 0x00000000;
//
//
//
//
//
//
//
B2
B1
B0
A2
A1
Clamp Hi limit (Q26)
Clamp Lo
Control Law Computation
U (n) B0 E (n) B1E (n 1) B2 E (n 2) A1U (n 1) A2U (n 2)
U(n)
DBUFF
U(n-1)
XAR7
A1
U(n-2)
A2
E(n)
B0
E(n-1)
B1
E(n-2)
B2
min
max
duty
; e(n)=Vref-Vout
MOVU
ACC,@Vref
SUBU
ACC,*XAR2++
LSL
ACC,#8
; ACC=e(n)
(Q24)
MOVL
@VCNTL_DBUFF+4,ACC
ZAPA
; Voltage control law
MOVL
XT,@VCNTL_DBUFF+8 ; XT=e(n-2)
QMPYAL
P,XT,*XAR7++
; b2*e(n-2)
MOVDL
XT,@VCNTL_DBUFF+6 ; XT=e(n-1), e(n-2)=e(n-1)
QMPYAL
P,XT,*XAR7++
; ACC=b2*e(n-2), P=b1*e(n-1)
MOVDL
XT,@VCNTL_DBUFF+4 ; XT=e(n), e(n-1)=e(n)
QMPYAL
P,XT,*XAR7++
; ACC+=b1*e(n-1), P=b0*e(n)
MOVL
XT,@VCNTL_DBUFF+2 ; XT=u(n-2)
QMPYAL
P,XT,*XAR7++
; P=a2*u(n-2)
MOVDL
XT,@VCNTL_DBUFF
; XT=u(n-1), u(n-2)=u(n-1)
QMPYAL
P,XT,*XAR7++
; ACC=a2*u(n-2)
ADDL
ACC,P
; ACC=a2*u(n-2)+a1*u(n-1)
LSL
ACC,#(23-VCNTL_QF+8)
; (Q23)
ADDL
ACC,ACC
; (Q24)
MOVL
@VCNTL_DBUFF,ACC ; ACC=u(n)
; Saturate the result [min,max]
MINL
ACC,*XAR7++
MAXL
ACC,*XAR7++
; Duty Cycle Modulation
MOVL
XT,ACC
QMPYL
P,XT,*XAR7++
;(Q0)
MOV
*XAR3++,P
Type II Controller
Lo
Vin
Vout
COMPARATOR
+
-
1
1
R2C2
Gc ( s)
R1C1 C1 C2
s s
R2C1C2
s
Co
Do
DRIVER
CONTROLLER
C1
C2
R2
R1
+
-
REF
Bode Diagram
80
70
60
R1 4.12k
Magnitude (dB)
50
R2 124k
40
30
20
10
0
C1 8.2 pF
-10
-20
0
Phase (deg)
C2 2.2nF
-45
-90
2
10
3
10
4
10
5
10
Frequency (rad/sec)
6
10
7
10
8
10
Digital Type II Controller
Lo
Vin
Vout
Do
B2 B1 z 1 B0 z 2
Gc ( z )
1 A1 z 1 A0 z 2
Co
DRIVER
DIGITAL
PROCESSOR
CONTROLLER
Bode Diagram
100
B2 9.927
B1 0.03632
Magnitude (dB)
80
60
40
20
0
-20
90
A1 1.339
45
A0 0.3391
Phase (deg)
B0 9.891
0
-45
(Tustin’s transform, Ts = 1 us)
-90
2
10
3
10
4
10
5
10
Frequency (rad/sec)
6
10
7
10
8
10
Type III Controller
Lo
Vin
Vout
COMPARATOR
+
Do
-
1
1
s
s
R
C
R
R
C
R R3
2 2
1
3
3
Gc ( s) 1
R1 R3C1 C1 C2
1
s
s s
R
C
C
R
C
2 1 2
3 3
Co
DRIVER
CONTROLLER
C1
C2
C3
R2
R3
R1
+
-
REF
Bode Diagram
40
R2 20.5k
R3 150
Magnitude (dB)
R1 4.12k
C1 0.22nF
20
10
0
45
Phase (deg)
C2 2.7nF
C3 6.8nF
30
0
-45
-90
3
10
4
10
5
10
Frequency (rad/sec)
6
10
7
10
Digital Type III Controller
Lo
Vin
Gc ( z )
1
2
Vout
Do
3
B3 B2 z B1 z B0 z
1 A2 z 1 A1 z 2 A0 z 3
Co
DRIVER
DIGITAL
PROCESSOR
CONTROLLER
B3 9.658
Bode Diagram
100
B2 9.158
B0 9.164
A2 2.128
Magnitude (dB)
B1 9.652
80
40
20
0
A1 1.397
90
45
Phase (deg)
A0 0.2689
60
0
-45
(Tustin’s transform, Ts = 1 us)
-90
3
10
4
10
5
10
Frequency (rad/sec)
6
10
7
10
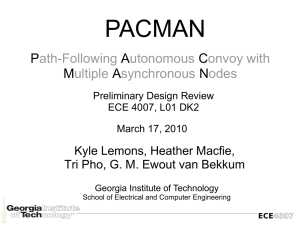
2-Channel Buck EVM
TI PowerTrain
PTD08A010W
10A module
Current meas.
Temp meas
Over Current Prot.
Over Current Flag
No Heat-sink needed
Phase Links
Active
Load LEDs
Volt
Meter
2-Channel Buck EVM Schematic
Lab4: Tuning the Loop
Tune closed-loop Buck power stage for improved transient performance
using visual “trial and error” (rather than mathematical approach)
The 2-channel Buck EVM has an active load circuit when enabled by software
provides a repetitive step change in load
CCS graph window feature used to view the transient in real-time
Transient response can be modified directly until the desired improvement is
achieved by adjusting P, I, D sliders
Fault
Trip
Coefficient “tuning”
P
I
SSartSEQ
D
Vset
Delay
PID
Mapping
( 3 to 5 )
CCS or GUI
sliders
OR
Im
Pole / Zero
to Coef Map
(5 to 5)
Re
Pole / Zero
adjust GUI
Slope
Dead
Band
Out
Target
Coeff set 3
Coeff set 2
Coeff
- B2 set 1
Coeff
Coeff - B2
CoeffCoeff
- B1 - B2
Coeff - B1
CoeffCoeff
- B0 - B1
Coeff - B0
CoeffCoeff
- A2 - B0
Coeff - A2
CoeffCoeff
- A1 - A2
Coeff - A1
Coeff - A1
Control
“2P2Z”
Ref
FB
Duty
Clamp
“PWM”
DRV
E
P
W
M
In
H
W
“ADC”
DRV
A
D
C
Rslt
H
W
Duty
Uout
Open/Closed
Loop
Feedback
Graph Window
DataLog
Mem
Buffer
In
Multi-Loop Control
Supervisory BG
Loop-1 mgmt
Control Engine(s)
Coef[1]
Vref[1]
2 pole /
2 Zero
Ref
Uout
Uout[1]
ePWM
module
Duty PWM
FB
ADC
module
Controller 1
Out
Loop-2 mgmt
Coef[2]
Vref[2]
2 pole /
2 Zero
Ref
Uout
Uout[2]
ePWM
module
Duty PWM
ADC
module
Out
Loop-N mgmt
Coef[N]
Vref[N]
2 pole /
2 Zero
Ref
Uout
Uout[N]
ADC-2
ePWM
module
Duty PWM
ADC
module
Out
Diag, slow
adjustment.
PWM-2
In
FB
Controller N
ADC-1
In
FB
Controller 2
PWM-1
ADC-N
In
ADC
module
Out
PWM-N
In
ADC GenPurp
PFC (2PHIL) Software Control Flow
VpfcSetSlewed
1 kHz
SLEW
LIMIT
385 V
VpfcSet
VpfcSlewRate
In
Out
Incr
VpfcCntl
VpfcOvp
1 kHz
100 kHz
100 kHz
CNTL
2P2Z
PFC
OVP
PFC
ICMD
Ref
Out
In
CNTL
2P2Z
Out
Ref
PfcIcmd
V2
Voltage
Controller
PFC
2PHIL
DRV
100 kHz
V1
Out
Fdbk
Vmon
2
100 kHz
Out
PfcDuty
Duty
Fdbk
Adj
Vac
E
P
W
M
EPWM1A
H
W
EPWM1B
Current
Controller
Vboost
Vboost
PfcShareAdj
VpfcSet
InvVavgSqr
Ipfc
385 V
160 V
50 kHz
50 kHz
200 kHz
200 kHz
INV
SQR
FILT
BIQUAD
AC
LINE
RECT
FILT
2P2Z
50mS
Out
In
Out
In
Out
In
Out
200 kHz
Ipfc
Vboost
In
VacLine
rslt0
rslt1
rslt2
rslt3
Vavg
VacLineAvg
VacLineRect
IN0
ADC
SEQ1
DRV
VacLineFilt
rslt4
BOX
CAR
AVG
IphA
100 Hz
IpfcAvgA
PFC
ISHARE
PfcShareAdj
IphB
Out
In
BOX
CAR
AVG
Ia
Ib
Out
IpfcAvgB
Out
50 kHz
In
rslt5
IpfcPhaseA
HalfVref
50 kHz
IpfcPhaseB
A
D
C
H
W
IN1
IN2
IN3
IN4
IN5
DC-DC (ZVSFB) Software Control Flow
200 kHz
200 kHz
SLEW
LIMIT
48 V
2
VoutSet
In
VoutSlewRate
Incr
200 kHz
VoutSetSlewed
CNTL
2P2Z
Ref
Out
Out
Voltage
Controller
VdcCntl
Fdbk
Vout
I_FOLD
BACK
V
Out
phase
PhaseCntl
I
50 kHz
Rv
VoutSet
Fv
48 V
Ri
PSFB
DB
DRV
Fi
CNTL
2P2Z
0V
100ms
12 A
IoutSet
Ipri
Ref
Fdbk
Out
EPWM1A
PSFB
DRV
200 kHz
200 ns
DbAdjL
llegdb
180 ns
DbAdjR
rlegdb
EPWM1B
E
P
W
M
EPWM2A
EPWM2B
H
W
IdcCntl
200 kHz
200 kHz
Current Controller
Ipri
Ipri
rslt0
Vout
Vout
rslt1
ADC
SEQ2
DRV
A
D
C
IN0
H
W
IN1
CPU Bandwidth Utilization
MIPS = 100
# TS = 4
S. rate = 200
ISR
All
TS1
TS2
TS3
TS4
Rate
# inst / us = 100
# inst / time slice = 500
Sampling period = 5.0
Function / Activity
# Cyc
PWM (kHz) = 200
PWM (bits) = 9.0
Tot. Cyc.
292
200 kHz Context Save / Restore
32
200 kHz
200 kHz
200 kHz
200 kHz
200 kHz
200 kHz
200 kHz
200 kHz
200 kHz
200 kHz
ISR Call / Return / Ack
Time slice Mgmt
ADCSEQ2_DRV
CNTL_2P2Z 1 (V loop)
CNTL_2P2Z 2 ( I loop)
I_FOLD_BACK
ZVSFB_DRV
ADCSEQ1_DRV
FILT_2P2Z
AC_LINE_RECT
24
12
14
36
36
25
14
57
35
7
100 kHz
100 kHz
100 kHz
100 kHz
PFC_OVP
PFC_ICMD
CNTL_2P2Z 4 (I loop)
PFC2PHIL_DRV
25
30
36
26
117
50 kHz
50 kHz
100 Hz
50 kHz
1 kHz
BOXCAR_AVG 1
BOXCAR_AVG 2
PFC_ISHARE
Execution Pre-scaler(1:50)
CNTL_2P2Z 3 (V loop)
42
42
15
10
36
145
100 kHz
100 kHz
100 kHz
100 kHz
PFC_OVP
PFC_ICMD
CNTL_2P2Z 4 (I loop)
PFC2PHIL_DRV
25
30
36
26
117
FILT_BIQUAD
INV_SQR
46
78
124
50 kHz
50 kHz
FW_Isr
Stats
% Util
58%
Every ISR call
Context Save
ADCSEQ2_DRV
CNTL_2P2Z(1)
CNTL_2P2Z(2)
ZVSFB_DRV
ADCSEQ1_DRV
FILT_2P2Z
AC_LINE_RECT
% Util
Time Slice mgr
82%
#Cyc. Rem.
91
% Util
87%
#Cyc. Rem.
63
% Util
82%
#Cyc. Rem.
91
50 kHz
50 kHz
50 kHz
Function / Activity
Comms + Supervisory
+ Soft-Start + Other ?
SLEW_LIMIT 1
SLEW_LIMIT 2
TS2
TS3
TS4
PFC_OVP
PFC_ICMD
CNTL_2P2Z(4)
PFC2PHIL_DRV
BOXCAR_AVG(1)
BOXCAR_AVG(2)
PFC_ISHARE
ExecPS(1:50)
CNTL_2P2Z(3)
PFC_OVP
PFC_ICMD
CNTL_2P2Z(4)
PFC2PHIL_DRV
FILT_BIQUAD
INV_SQR
% Util
83%
# inst. Tot.Cyc.
400
434
Stats
Int Ack
Context restore
17
17
% ISR utilization =
Spare ISR MIPS =
BG loop rate (kHz) / (us) =
Return
87%
12.6
29.0
34.4
50 kHz
TS1
#Cyc. Rem.
84
BG
200 kHz
Workshop Outline
1.
Introduction to Digital Power
Supply Design
2.
Driving the Power Stage with PWM
Waveforms
3.
Lab: Closed-Loop Control
Tuning the Loop for Good Transient
Response
5.
Lab: PWM Generation / Open-Loop Control
Controlling the Power Stage with
Feedback
4.
Lab: Exploring the Development Environment
Lab: Tuning the Loop
Summary and Conclusion
Summary and Conclusion
Review of Workshop Topics and
Exercises
TI Digital Power Products
C2000 Digital Signal Controller
Family
UCD9xxx Digital Power Controller
Family
Where to Find More Information
Workshop Topics and Exercises Review
C28x DSC family provides ideal controller
for Digital Power Supply design
Scalable ePWM peripherals, ADC and fault
management support
Code Composer Studio, DPS Library and TI
Buck EVM
Controlled Buck output voltage using
PWM waveform and duty cycle without
feedback
Controlled Buck output using Voltage
Mode Control with feedback
Tuned closed-loop Buck power stage
visually using CCS features
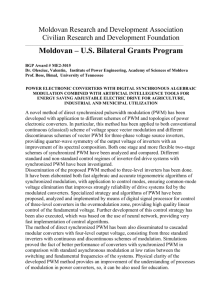
TI Is The Right Digital Power Partner
TI solutions cover the spectrum of power applications
Flexibility
TMS320F282x
TMS320F281x
TMS320F283x
TMS320F280x
Fully Programmable,
Control Focused
UCD9111
UCD9112
UCD9220
UCD9240
Power-Optimized
Controllers
System Complexity
TI’s Digital Power Solutions Span the
Industry
Non-Isolated DC/DC POL
Isolated DC/DC &
Offline AC/DC
• UCD91xx Single-Output Digital Controller • TMS320C2000 Digital Signal Controllers
• UCD92xx Multi-Output Digital Controller
• TMS320C2000 Digital Signal Controllers
DC/AC Inverters
• TMS320C2000 32-bit controller
solutions for green energy (solar, wind,
fuel cells) and UPS battery backup
System Management
Only
• UCD9080 Power Supply Sequencer
and Monitor
C2000 Family Roadmap
F283xx
F282xx
F282xx
F281x
F281x
150
150 MHz
MHz
88 Devices
Devices
F280xx
F280xx
60 MHz
MHz
60
150ps PWM
PWM
150ps
Future
Future
C28xxx
C28xxx
300 MFLOPS
FPU, DMA
150
150 MHz
MHz
DMA
DMA
Future
C28xxx
F280x
F280xx
100
MHz
100MHz
150ps PWM
PWM
150ps
TMS320F280xx Digital Signal Controllers
High Performance Signal Processing
Code security
32-256
KB
Flash
12-36
KB
RAM
8KB
Boot
ROM
PWM
Event Capture
Memory Bus
C28xTM 32-bit DSC
32x32-bit
Multiplier
RMW
Atomic
ALU
32-bit
Timers (3)
Real-Time
JTAG
Peripheral Bus
Interrupt Management
QEP
12-bit ADC
Watchdog
Memory Sub-System
Fast program execution out of both RAM and
Flash memory
80 MIPS with Flash Acceleration Technology
100 MIPS out of RAM for time-critical code
Control Peripherals
CAN 2.0 B
I2C
SCI
32-bit
Register
File
Up to 100 MHz performance
Single cycle 32 x32-bit MAC (or dual 16 x16 MAC)
Very Fast Interrupt Response
Single cycle read-modify-write
SPI
GPIO
Up to 16 PWM channels and 4 event captures
150 ps High-Resolution PWM
Ultra-Fast 12-bit ADC
6.25 MSPS throughput
Dual sample&holds enable simultaneous sampling
Auto Sequencer, up to 16 conversions w/o CPU
Communications Ports
Multiple standard communication ports provide
simple interfaces to other components
Datasheet available at: http://www-s.ti.com/sc/ds/tms320f2808.pdf
F280xx Controller Portfolio
All Devices are 100% Hardware, Software & Pin Compatible
MHz
Flash
KB
RAM
KB
12-bit
16-ch
ADC
PWM/
Hi-Res.
CAP/
QEP
Communication
Ports
F28015
60
32
12
267ns
10/4
2/0
SPI, SCI, I2C
F28016
60
32
12
267ns
10/4
2/0
SPI, SCI, CAN, I2C
F2801-60
60
32
12
267ns
8/3
2/1
2x SPI, SCI, CAN, I2C
F2802-60
60
64
12
267ns
8/3
2/1
2x SPI, SCI, CAN, I2C
F2801
100
32
12
160ns
8/3
2/1
2x SPI, SCI, CAN, I2C
F2802
100
64
12
160ns
8/3
2/1
2x SPI, SCI, CAN, I2C
F2806
100
64
20
160ns
16/4
4/2
4x SPI, 2x SCI, CAN, I2C
F2808
100
128
36
160ns
16/4
4/2
4x SPI, 2x SCI, 2x CAN, I2C
F2809
100
256
36
80ns
16/6
4/2
4x SPI, 2x SCI, 2x CAN, I2C
F28044
100
128
20
80ns
16/16
0
SPI, SCI, I2C
TMS320
100-pin LQFP and u*BGA; Also available in -40 to 125 C and Automotive Q100
TMS320F283xx Digital Signal Controllers
High Performance Signal Processing
Code security
128-512
KB
Flash
52-68
KB
RAM
8KB
Boot
ROM
PWM
Event Capture
Memory Bus
Interrupt Management
C28xTM 32-bit DSC
32x32-bit
Multiplier
RMW
Atomic
ALU
32-bit
Timers (3)
Real-Time
JTAG
Peripheral Bus
DMA
QEP
12-bit ADC
Watchdog
Memory Sub-System
Fast program execution out of both RAM and
Flash memory
120 MIPS with Flash Acceleration Technology
150 MIPS out of RAM for time-critical code
Control Peripherals
CAN 2.0 B
I2C
SCI
32-bit
FloatingPoint Unit
Up to 150 MHz performance with 32-bit floatingpoint unit
Six-channel DMA speeds data throughput
Very Fast Interrupt Response
SPI
McBSP
Up to 16 PWM channels and 4 event captures
150 ps High-Resolution PWM
Ultra-Fast 12-bit ADC
12.5 MSPS throughput
Dual sample&holds enable simultaneous sampling
Auto Sequencer, up to 16 conversions w/o CPU
Communications Ports
Multiple standard communication ports provide
simple interfaces to other components
Datasheet available at: http://www-s.ti.com/sc/ds/tms320f28335.pdf
F283xx & F282xx Controller Portfolio
TMS320
MHz
FPU
Flash
KB
RAM
KB
12-bit
16-ch ADC
DMA
PWM/
HRPWM
CAP/
QEP
F28335
150
Yes
512
68
80 ns
Yes
18/6
6/2
F28334
150
Yes
256
68
80 ns
Yes
18/6
4/2
F28332
100
Yes
128
52
80 ns
Yes
16/4
4/2
F28235
150
No
512
68
80 ns
Yes
18/6
6/2
F28234
150
No
256
68
80 ns
Yes
18/6
4/2
F28232
100
No
128
52
80 ns
Yes
16/4
4/2
Communication
Ports
SPI, 3x SCI, I2C,
2x McBSP, 2x
CAN
SPI, 3x SCI, I2C,
2x McBSP, 2x
CAN
SPI, 2x SCI, I2C,
McBSP, 2x CAN
SPI, 3x SCI, I2C,
2x McBSP, 2x
CAN
SPI, 3x SCI, I2C,
2x McBSP, 2x
CAN
SPI, 2x SCI, I2C,
McBSP, 2x CAN
• 176-pin/ball LQFP/PBGA; 179-ball u*BGA; -40 to 125 C and Q100 in PBGA
• IQMath library provides software compatibility between floating-point and
fixed-point!
C2000 controlCARDs
F2808
F28335
only $59!
only $69!
New low cost single-board controllers perfect for initial software
development and small volume system builds.
Small form factor (9cm x 2.5cm) with standard 100-pin DIMM
interface
F28x analog I/O, digital I/O, and JTAG signals available at
DIMM interface
Isolated RS-232 interface
Single 5V power supply required
controlCARDs available for 100MHz fixed-point TMS320F2808
and 150 MHz TMS320F28335 floating-point controller
controlCARDs are available individually through TI distributors
and on the web:
Part Number: C2000-CC2808
Part Number: C2000-CC28335
Digital Power Experimenter Kit
DPEK
only $229!
DPEK includes
2-rail DC/DC EVM using TI
PowerTrain™ modules (10A)
On-board digital multi-meter and
active load for transient
response tuning
F2808 controlCARD
C2000 Applications Software CD
with example code and full
hardware details
Digital Power Supply Workshop
teaching material and lab
software
Code Composer Studio v3.3 with
code size limit of 32KB
9VDC power supply
DPEK available through TI
authorized distributors and on
the web
Part Number:C2000-DCDC2KIT
C2000 DC/DC Developer’s Kit
Only
$325!
DC/DC Kit includes
8-rail DC/DC EVM using TI
PowerTrain™ modules (10A)
F28044 controlCARD
C2000 Applications Software CD
with example code and full
hardware details
Code Composer Studio v3.3 with
code size limit of 32KB
9VDC power supply
Available through TI
authorized distributors and on
the web
Part Number:C2000-DCDC8KIT
C2000 AC/DC Developer’s Kit
Only
AC/DC Kit includes
$695!
AC/DC EVM features
AC/DC EVM with interleaved PFC
and phase-shifted full-bridge
F2808 controlCARD
C2000 Applications Software CD
with example code and full
hardware details
Code Composer Studio v3.3 with
code size limit of 32KB
12VAC in, 80W/10A output
Primary side control
Synchronous rectification
Peak current mode control
Two-phase PFC with current
balancing
AC/DC Kit available through TI
authorized distributors and on the
web
Part Number:C2000-ACDCKIT
Emulation Solutions for C2000 Controllers
BlackHawk USB2000
Controller only $299
Full CCS compatibility
Bi-Color Status LED
(red/green)
3.3/5.0 volt device I/O
Optional Isolation Adaptor for
$299
http://www.blackhawkdsp.com/Resellers.aspx
Spectrum Digital XDS510-LC
only $249
Full CCS compatibility
Supports SDFlash
programming utility
Supports XMLGUI for
interfacing to ‘C’ – provides
scripting capability
http://www.spectrumdigital.com
VisSim Graphical Programming
for C2000
www.vissim.com
Model based design for
simulation, code generation,
and interactive debugging
Efficient code generation
near hand code quality
Automatic code generation
for F28xx peripherals: ADC,
SCI, SPI, I2C, CAN, ePWM,
GPIO
High speed target
acquisition for wave form
display on PC
Watch ‘how to’ tutorials on
Visual Solutions web site
Performance
UCD9xxx Digital Power Controller Family
UCD92xx
UCD9240
4 ind outputs
64 & 80 pin
UCD9230
3 ind outputs
48 pin
UCD9220
2 ind outputs
32 pin
UCD9112
1 output, 2 phase
32 pin
UCD9111
1 output, 1 phase
32 pin
UCD91xx
Integration
Recommended Next Step:
One-day Training Course
TMS320C28x 1-Day Workshop Outline
- Workshop Introduction
- Architecture Overview
- Programming Development Environment
- Peripheral Register Header Files
- Reset, Interrupts and System Initialization
- Control Peripherals
- IQ Math Library and DSP/BIOS
Introduction to
TMS320F2808
Design and
Peripheral Training
- Flash Programming
- The Next Step…
Recommended Next Step:
Multi-day Training Course
TMS320C28x Multi-day Workshop Outline
- Architectural Overview
- Programming Development Environment
- Peripheral Register Header Files
- Reset and Interrupts
- System Initialization
- Analog-to-Digital Converter
- Control Peripherals
In-depth
TMS320F2808
Design and
Peripheral Training
- Numerical Concepts and IQmath
- Using DSP/BIOS
- System Design
- Communications
- Support Resources
For More Information . . .
Internet
Website: http://www.ti.com
FAQ: http://www-k.ext.ti.com/sc/technical_support/knowledgebase.htm
Device information
my.ti.com
Application notes
News and events
Technical documentation
Training
Enroll in Technical Training: http://www.ti.com/sc/training
USA - Product Information Center ( PIC )
Phone: 800-477-8924 or 972-644-5580
Email: support@ti.com
Information and support for all TI Semiconductor products/tools
Submit suggestions and errata for tools, silicon and documents
European Product Information Center (EPIC)
Web: http://www-k.ext.ti.com/sc/technical_support/pic/euro.htm
Phone: Language
Belgium (English)
France
Germany
Israel (English)
Italy
Netherlands (English)
Spain
Sweden (English)
United Kingdom
Finland (English)
Fax: All Languages
Number
+32 (0) 27 45 55 32
+33 (0) 1 30 70 11 64
+49 (0) 8161 80 33 11
1800 949 0107 (free phone)
800 79 11 37 (free phone)
+31 (0) 546 87 95 45
+34 902 35 40 28
+46 (0) 8587 555 22
+44 (0) 1604 66 33 99
+358(0) 9 25 17 39 48
+49 (0) 8161 80 2045
Email: epic@ti.com
Literature, Sample Requests and Analog EVM Ordering
Information, Technical and Design support for all Catalog TI
Semiconductor products/tools
Submit suggestions and errata for tools, silicon and documents
Technical Training
Organization
ti