High Precision Microcontroller Based Robot Control Using PC
advertisement

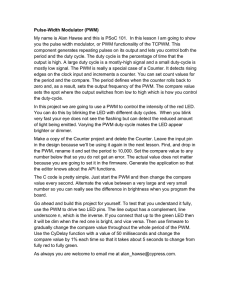
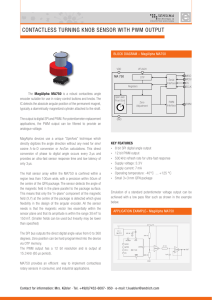
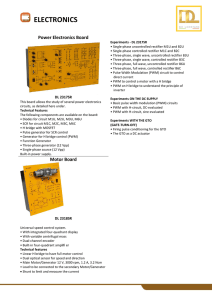
High Precision Microcontroller Based Robot Control Using PC Aim To design and implement a microcontroller based robot control using PC. The system will be able to control wireless robot remotely. We will also be able to control the individual motor speed using PWM output so that user can maneuver robot according to his needs. PC based control will allow us to save/load/execute profiles using user defined maps. Advantages Mobile Robots fuses the best of old reliable and new sophisticated navigational techniques so that the robot intelligently relies upon whichever sensors, localization and navigation approach is best suited to your work environment. Depending upon the application, it may use different techniques in day than night. Simple operation means user training time is brief. Depending upon the user interface selected, your robots may operate at the touch of a button, the click of a mouse, or without any user intervention at all. PWM Pulse-width modulation (PWM) is a very efficient way of providing intermediate amounts of electrical power between fully on and fully off. A simple power switch with a typical power source provides full power only when switched on. PWM is a comparatively recent technique, made practical by modern electronic power switches. In the past, when only partial power was needed (such as for a sewing machine motor), a rheostat (located in the sewing machine's foot pedal) connected in series with the motor adjusted the amount of current flowing through the motor, but also wasted power as heat in the resistor element. It was an inefficient scheme, but tolerable because the total power was low. This was one of several methods of controlling power. There were others—some still in use—such as variable autotransformers, including the trademarked Autrastat for theatrical lighting; and the Variac, for general AC power adjustment. These were quite efficient, but also relatively costly. For about a century, some variable-speed electric motors have had decent efficiency, but they were somewhat more complex than constant-speed motors, and sometimes required external electrical apparatus, such as a bank of variable power resistors. However, there is a great need for applying partial power in other devices, such as electric stoves, lamp dimmers, and robotic servos. Basically, a PWM variable-power scheme switches the power quickly between fully on and fully off—e.g. several times a minute in an electric stove, 120 Hz in a lamp dimmer, and well into the tens or hundreds of kHz in a computer power supply (which has a regulated output). In any event, the switching rate is much faster than what would affect the load, which is to say the device that uses the power. In practice, applying full power for part of the time does not cause any problems; PWM is very practical. The term duty cycle describes the proportion of on time to the regular interval or period of time; a low duty cycle corresponds to low power, because the power is off for most of the time. Duty cycle is expressed in percent, 100% being fully on.