Sigmetrics Tutorial On Control Engineering -- Part 1
advertisement

Introduction to Control Theory and Its
Application to Computing Systems
Tarek Abdelzaher, University of Illinois
Yixin Diao, IBM Research
Joseph L. Hellerstein, Microsoft Developer Division
Chenyang Lu, Washington University
Xioayun Zhu, Hewlett Packard Laboratories
June 2, 2008
Tutorial Agenda
Control theory fundamentals
Self-tuning memory management in IBM’s DB2
Control of real-time systems using model-predictive control
Automated workload management in virtualized data centers
Managing power and performance in data centers
Research challenges
SIGMETRICS 2008: Introduction to Control Theory. Abdelzaher, Diao, Hellerstein, Yu, and Zhu.
Tutorial Agenda
Control theory fundamentals
Control architecture and taxonomy
Simple analytics
Application summaries
Regulating load for IBM’s Lotus Domino email server
Throttling administrative work for IBM’s DB2
Optimizing throughput for Microsoft’s .NET thread pool
Self-tuning memory management in IBM’s DB2
Control of real-time systems using model-predictive control
Automated workload management in virtualized data centers
Managing power and performance in data centers
Research challenges
SIGMETRICS 2008: Introduction to Control Theory. Abdelzaher, Diao, Hellerstein, Yu, and Zhu.
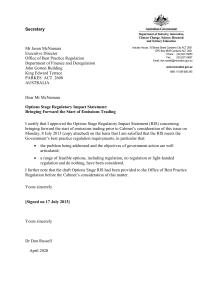
Elements of a Control System
Reference
Input +
-
Control
Error
Control
Input
Controller
Transduced
Output
Disturbance Input
Measured
Output
Target
System
Transducer
Given target system, transducer
Components
Control theory finds controller
Target system: what is controlled
that adjusts control input
Controller: exercises control
to achieve measured
Transducer: translates measured outputs
output in the presence of
Data
disturbances.
Reference input: objective
Control error: reference input minus measured output
Control input: manipulated to affect output
Disturbance input: other factors that affect the target system
Transduced output: result of manipulation
SIGMETRICS 2008: Introduction to Control Theory. Abdelzaher, Diao, Hellerstein, Yu, and Zhu.
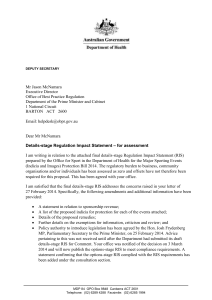
Closed Loop vs. Open Loop
Administrative
Tasks
Reference
RIS
+
-
MaxUsers
Closed Loop
Controller
Adapts
Simple system model
Target System
Actual
Measured
RIS
RIS
Server
Sensor
Closed Loop System
Administrative
Tasks
Reference
RIS
MaxUsers
Open Loop
Controller
Server
Target System
Actual
Measured
RIS
RIS
Sensor
Open Loop System
SIGMETRICS 2008: Introduction to Control Theory. Abdelzaher, Diao, Hellerstein, Yu, and Zhu.
Stable
Fast settling
Types of Control
MaxUsers
Reference
RIS
Target System
Controller
+
Server
Measured
RIS
Sensor
-
Administrative
Tasks
MaxUsers
Reference
RIS
+
Controller
Target System
Server
Measured
RIS
Sensor
-
Administrative
Tasks
MaxUsers
Controller
Target System
Server
Sensor
Measured
RIS
Manage to a reference value
Ex: Service differentiation,
resource management, constrained
optimization
Regulatory Control
Eliminate effect of a disturbance
Ex: Service level management,
resource management, constrained
optimization
Disturbance Rejection
Achieve the “best” value of outputs
Ex: Minimize Apache response times
Optimization
SIGMETRICS 2008: Introduction to Control Theory. Abdelzaher, Diao, Hellerstein, Yu, and Zhu.
The SASO Properties of Control Systems
Stability
Accuracy
Unstable System
Short Settling
Small Overshoot
SIGMETRICS 2008: Introduction to Control Theory. Abdelzaher, Diao, Hellerstein, Yu, and Zhu.
Control Theory By Example – IBM Domino Server
Good
Architecture
Admin
Controller
RPCs
MaxUsers
Server
Desired
RIS
(RPCs in System)
Actual RIS
Bad
Block Diagram
MaxUsers
Desired
RIS
r(k)
e(k)
+
-
Actual
RIS
u(k)
Controller
y(k)
Server
SIGMETRICS 2008: Introduction to Control Theory. Abdelzaher, Diao, Hellerstein, Yu, and Zhu.
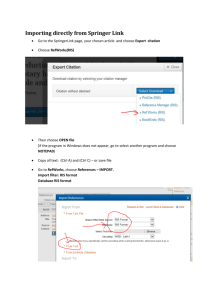
Dynamical Analysis of Discrete Time Systems
y (k + 1) ay (k ) + bu (k )
u (k )
y (k )
Server
Z-Transform
y (k + 1) ay (k ) + bu (k ) zY ( z ) aY ( z ) + bU ( z )
Transfer
Function (TF)
Y ( z)
b
F ( z)
(ba 0 , ba1 , ba 2 ,...
U(z) z - a
Pole:
Output at time k is
k
proportional to a , for pole a.
5
5
5
a=0.4
a=1.2
a=0.9
0
0
0
-5
-5
-5
5
5
5
Fast systems have small poles
Oscillations result if neg or im poles
a=-1.2
a=-0.4
a=-0.9
0
Gain:
Ratio of steady state output
to steady state input
0
-5
0
-5
0
5
10
-5
0
5
10
0
5
SIGMETRICS 2008: Introduction to Control Theory. Abdelzaher, Diao, Hellerstein, Yu, and Zhu.
10
9
Control Design
r(k)
e(k)
+
u(k)
Controller
G(z)
Y ( z)
F ( z)
R(z)
y(k)
Server
N(z)
Closed Loop Transfer Function
Example: Control Law
u(k ) u(k -1) + K I e(k )
KI=0.1
KI=1
KI=0.1
Poles
of
FR(z)
KI=5
Key Results From Linear Systems
Adding signals:
A(z)
+
G(z)
Y(z)
0.5
2
0.4
1.5
y(k)
u(k)
0.3
1
C(z)
+
U(z)
B(z)
Transfer functions in series
U(z)
G(z)
W(z)
H(z)
Y(z)
is equivalent to
0.2
U(z) G(z)H(z) Y(z)
0.5
0.1
0
0 10 20 30
k
0
0 10 20 30
k
Stable if |a|<1, where a is the largest pole of G(z)
kS
{c(k)=a(k)+b(k)} has
Z-Transform A(z)+B(z).
-4
, where | a | is the largest pole of G(z)
ln | a |
y ( )
G (1)
Steady state gain of G(z):
u ( )
Transfer function of a feedback loop
Target
System
Controller
R(z) +
T(z)
K(z)
G(z)
H(z)
Transducer
FR ( z )
T ( z)
K ( z )G ( z )
R( z ) 1 + H ( z ) K ( z )G ( z )
SIGMETRICS 2008: Introduction to Control Theory. Abdelzaher, Diao, Hellerstein, Yu, and Zhu.
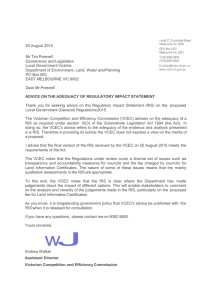
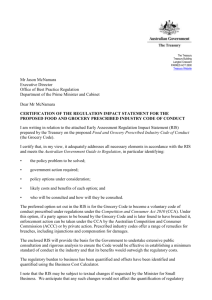
Application 2: Throttling Administrative Work in IBM’s DB2
12
DB2
Thruput (tx/sec)
10
BACKUP
RUNSTATS
REBALANCE
DBA
8
Drops by >70%!!
6
4
2
0
0
w/o Utility
with Utility
Utility
Started
500
1000
Time (sec)
Utilities have a big impact on production performance.
Administrative policy
There should be no more than an x% performance degradation of production work as a result of
executing administrative utilities
SIGMETRICS 2008: Introduction to Control Theory. Abdelzaher, Diao, Hellerstein, Yu, and Zhu.
1500
Choosing an Actuator
Production Throughput
CPU Priority
Sleep mechanism
5
4
3
2
1
Normalized Effector Value
0
0
200
400
600
800
0
200
400
600
800
1000
1200
1400
1600
1800
2000
0
500
1000
1000
1200
1400
1600
1800
2000
0
500
1000
1500
2000
2500
1500
2000
2500
1
0.8
0.6
0.4
0.2
0
Time (sec)
Time (sec)
SIGMETRICS 2008: Introduction to Control Theory. Abdelzaher, Diao, Hellerstein, Yu, and Zhu.
Control Architecture
WL
% Impact
DBA
R: Impact Limit
R +
-
E
U
Controller
E: Error
DB2
% Impact
U: Sleep %
Y: Pageometer
(pages/sec)
Pages/sec
Y*
Baseline
Estimation
M
Compute
Degradation
: Model parameters
Y
Model
Estimation
Y*: Baseline perf
Y
Assume linear effect of throttling on Y
y
u
1
a, b)
Workload
Y* a + b
b
Y* - Y
M
Y*
E R -M
E
Controller
U
Utility
a
b
aU
Online modeling provides a transducer that translates
from Pages/sec (Y) to % Impact (M)
SIGMETRICS 2008: Introduction to Control Theory. Abdelzaher, Diao, Hellerstein, Yu, and Zhu.
Y
Optimizing Throughput in the Microsoft .NET ThreadPool
QueueUserWorkItem()
Concurrency
Level
Controller
Objective: Maximize CPU utilization and thread completion rates
Inputs: ThreadPool events, CPU utilization
Techniques
Thresholds on inter-dequeue times, rate of increasing workers, change in rate
of increasing workers
States: Starvation, RateIncrease, RateDecrease, LowCPU, PauseInjection
New approach
1
5
ThreadPool
Current ThreadPool
Completion Rate (throughput)
Objective: Maximize thread completion rate
Inputs: ThreadPool events
Technique: Hill climbing
SIGMETRICS 2008: Introduction to Control Theory. Abdelzaher, Diao, Hellerstein, Yu, and Zhu.
Hill Climbing Controller
Discrete
Derivative
Large
ControlGain
160
Want large gain so move quickly, but not
overshoot.
Making good moves depends on
•throughput variance
•shape of curve
Throughput
Small
140 ControlGain
120
CurrentHistor
y
100
80
LastHistory
NewConcourrencyLevel for
large ControlGain
60
40
0
LastConcurrencyLevel
10
20
30
#Threads
40
50
NewConcurrencyLevel
for small ControlGain
= History mean
CurrentConcurrencyLevel
(50 work items:100ms with 10%CPU, 90% wait. 2.2GHz dual core X86.)
Hybrid Control State Diagram
ChangePointWhileLookingForMove
Same as ChangePointWhileInitializing
WaitForSteadyState
IsInTransition()
State 2a – InTransition
CurrentHistory.Add(data)
State 2 – Looking for move.
CurrentHistory.Add(data)
CompletedInitializing
IsStableHistory(LastHistory):
LastControlSetting = CurrentControlSetting
CurrentControlSetting = ExploreMove()
State 1 - Initializing LastHistory.
LastHistory.Add(data)
ChangePointWhileInitializing
IsChangePoint(LastHistory):
LastHistory = data
CurrentControlSetting
= ExploreMove()
DirectedMove
IsSignificantDifference(CurrentHistory,
LastHistory):
LastControlSetting = CurrentControlSetting
CurrentControlSetting = DirectedMove()
LastHistory = CurrentHistory
CurrentHistory = null
StuckInState
IsStableHistory(CurrentHistory) &
CurrentHistory.Count > SufficientlyLargeHistory:
LastControlSetting = CurrentControlSetting
CurrentControlSetting = ExploreMove()
LastHistory = CurrentHistory
CurrentHistory = null
ReverseBadMove
CurrentHistory.Count > MinimumHistory
& LastHistory.Mean() > CurrentHistory.Mean():
Swap(CurrentControlSetting,
LastControlSetting)
ChangePointInQueueWaiting
IsChangePoint(QueueOfWaiting)
State 1a – InTransition.
SIGMETRICS 2008: Introduction to Control Theory. Abdelzaher, Diao, Hellerstein, Yu, and Zhu.