Literature Review
advertisement

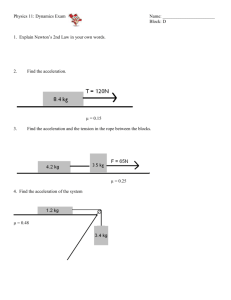
SALUKI ENGINEERING COMPANY Literature Review Team 76 - MOWR Team Members Project Manager: Brittany Murphy Dylan Hartman Rachel Parth Nathaniel Sparks Zachary Tennessen Christopher Tyra Brittany 10/6/2011 The objective of this project is to create a fully autonomous lawnmower. Upon completion, it will be able to mow a 10 by 15 meter yard, and avoid stationary and moving obstacles. Saluki engineering company 2 Literature Review Table of Contents Table of Figures ............................................................................................................................................ 3 Tables ............................................................................................................................................................ 4 T94-GPS Lawnmower-Design.................................................................... Error! Bookmark not defined. Case Western Reserve University CWRU Cutter C design review ............ Error! Bookmark not defined. Batteries ...................................................................................................... Error! Bookmark not defined. Robotics ........................................................................................................................................................ 6 Platform: ....................................................................................................................................................... 7 Actuator: ....................................................................................................................................................... 8 Microcontroller: ............................................................................................................................................ 9 Motor controller: ........................................................................................................................................... 9 Sensors: ....................................................................................................................................................... 10 GPS ............................................................................................................................................................. 12 Lawnmower ................................................................................................................................................ 12 Motors ......................................................................................................................................................... 13 Wheels ........................................................................................................................................................ 12 Works Cited ................................................................................................................................................ 16 Saluki engineering company 3 Literature Review Table of Figures Figure 1: CWRU Cutter 2 Isometric View ................................................. Error! Bookmark not defined. Figure 3: Tracked Robot Figure 4: Wheeled Robot............... Error! Bookmark not defined. Figure 5: Cytron Gear Motor with Encoder .................................................................................................. 8 Figure 6: Parallax BASIC Stamp 2p 40-pin Microcontroller ....................................................................... 9 Figure 7: Vex Bumper Switch .................................................................................................................... 11 Figure 8: Cytron Incremental Rotary Encoder ............................................................................................ 11 Figure 9: Ultrasonic Range Finder .............................................................................................................. 11 Figure 10: RXM-SG GPS module with External Antenna ......................... Error! Bookmark not defined. Figure 11: GPS Receiver Module ............................................................................................................... 12 Figure 12: PBM 648 SiRF Internal Antenna .............................................. Error! Bookmark not defined. Figure 13: Yardworks 18” 12A electric lawnmower .................................................................................. 13 Figure 14: Marathon Electric Brake Motor................................................................................................. 14 Figure 15: Acquired Spindle Wheel............................................................................................................ 14 Figure 16: Motorized Wheels ..................................................................................................................... 15 Figure 17: Battery hookup (top) Control Box hookup (bottom) ................................................................. 15 Saluki engineering company 4 Literature Review Tables Table 1 .......................................................................................................................................................... 5 Table 2 .......................................................................................................................................................... 7 Table 3 .......................................................................................................................................................... 8 Table 4 .......................................................................................................................................................... 9 Table 5 .......................................................................................................................................................... 9 Table 6 ........................................................................................................................................................ 12 Table 7 ........................................................................................................................................................ 12 Table 8 ........................................................................................................................................................ 12 Table 9 ........................................................................................................................................................ 14 Saluki engineering company 5 Literature Review Autonomous objects are created to make tasks simpler. One task that can be tedious is mowing the lawn. The Institute of Navigation is holding a competition to see who can build the best autonomous lawnmower. Team 76 will be entering this competition. This lawnmower will consist of seven subsystems: Frame Subsystem Battery/Power Subsystem Robotics Subsystem GPS Subsystem Computer Subsystem Mower Subsystem Wheels Subsystem Each of these subsystems will require a different kind of technology to function and communicate with each other in order to perform tasks required of the finished lawnmower, such as moving in different directions and avoiding obstacles. Each of these subsystems have individual components that have been researched and analyzed so that it can be determined what the most efficient way to implement them may be. Previous Design Review Case Western Reserve University CWRU Cutter C Design: Case Western Reserve University was the 1st place winners of the 2010 ION Robotic Lawn Mower Completion. Their design also distinguished itself as the only mower to cut over 50% of Table 1: CWRU Material List Saluki engineering company 6 Literature Review the required field in the allotted 20 minutes. The other participating teams failed to cut over 50% due to poor programming and path finding. Team 94-GPS Lawnmower-Design The previous time that SIUC had a senior design project based around the Autonomous Lawnmower Completion was during the Fall 2009 semester. There was no final working product. Figure 1: CWRU First Place Winner in 2010 Batteries In order to run the push mower deck, the corded push mower deck must be converted to run off of DC power from batteries. It is required to calculate out how much power is needed in order to run the push mower. The mower deck requires 120V and 12A to run. Saluki engineering company 7 Literature Review 𝑃𝑜𝑤𝑒𝑟(𝑊𝑎𝑡𝑡 𝐻𝑜𝑢𝑟𝑠) = 𝑉𝑜𝑙𝑡𝑠 ∗ 𝐴𝑚𝑝𝑠 → 𝑃𝑜𝑤𝑒𝑟 = 120𝑉 ∗ 12Ah The calculations show that 1440 Watts of power is needed to run the mower. The two main choices of battery are described in Table 4. Type Starting Lighting and Igniting Deep Cell (Deep Cycle) Purpose Large amount of instantaneous power to start object Small/medium amounts of continuously available power to draw upon Plate Type Thinner, porous plates made to increase surface area Thicker, solid plates made to allow longer current draws Power output Recommended for vehicle starting Recommended for continuous amounts of power consumptions Table 2: Battery Specifications Due to the continuous power requirements, the best choice of a battery would be one or two Deep cell batteries that can provide the amount of energy required for the autonomous lawnmower to operate. The autonomous lawnmower will need to be able to operate off of the battery for no less than 20 minutes. That is the maximum amount of time allotted to a team to mow the given yard. Robotics In order to create an automated lawnmower it is necessary to create a version of an artificial intelligent lawnmower. This requires a version of a robot lawn motor to be built, and that in turn involves many different components. Parts of a robot consist of: Platform Actuator Microcontroller Motor controller Sensors Provided are brief explanations of what each part will do in the overall system of a robot and offers possible choices for each part including specifications and cost of each component. Platform: Platforms are the type of robots that will be built. They range from land (wheeled, legged or tracked), to aerial to aquatic and finally to stationary robots. Saluki engineering company 8 Literature Review Figure 2: Wheeled Robot Figure 3: Tracked Robot Actuator: An actuator is a device that will change energy to physical motion. For robots, it is to change electrical energy into physical motion. Physical motion can contain of rotational or linear motion. This will allow the robot to move in any direction on the ground. The actuator is also known as a motor. There are several kinds of actuators; rotational actuators are AC, DC, geared DC, R/C servo, industrial servo and stepper motors. Linear actuators are DC linear, solenoids, muscle wire, pneumatic, and hydraulic. Name Cytron 12V, 1140rpm, 6.37oz-in Gear Motor with Encoder Tamiya Worm Gear Box Gear Ratio Voltage Torque Speed Current Price/unit 5:1 12 V 45mN.m 1140 rpm 0.9 A $50.00 216:1, 336:1 3V 70 g-cm 9400 rpm 2.7 A $13.97 Table 3: Actuator Comparison Figure 4: Cytron Gear Motor with Encoder Saluki engineering company 9 Literature Review Microcontroller: The microcontroller may be the most important part of the robot; it is in many cases considered the ‘brain’ of the robots. The microcontroller is the device that will execute a program in order to make the robot perform its task. This is also the device where outputs from various sensors used by the robot will feed into, to complete different requirements as stated in the program. Name Parallax BASIC Stamp 1 Microcontroller Module Processor Speed # of I/O pins Price/unit 4 MHz turbo 8 $29.00 NanoCore12MAXC128 Module Parallax BASIC Stamp 2p 40- Pin Microcontroller Module 8 MHz 40 $35.70 20 MHz turbo 32 and 2 dedicated serial $89.00 Table 4:Microcontroller Comparison Figure 5: Parallax BASIC Stamp 2p 40-pin Microcontroller Motor controller: The motor controller assists in controlling the motor. The microcontroller has the program in its memory, and is capable of directing the robot where to go and how fast to travel in that direction; however it usually does not have enough power to power itself as well drive the motor. Thus the microcontroller and the motor controller work in tandem – with the microcontroller reading its program and the inputs from the sensor and directing the motor control to power the motor with ‘x’ amount of power. There are different types of motor controllers; some of these types are DC motor control, servo motor control, stepper motor control, and linear actuator control. Saluki engineering company 10 Literature Review Name 2A 5V-16V Dual Serial Motor Controller Pololu DC Motor Driver 3A, 5V28V- MC33926 Current Operating Voltage Price/unit 2 A per motor, total of 4 A 5V-16V $19.95 3A 5V-28V $23.95 Table 5: Motor Controller Comparison Figure 6: Pololu DC Motor Driver Sensors: Sensors will allow the robot to explore and understand the environment it is in. There are many different types of sensors out there, and they can be used alone or in combinations with others. The outputs of these sensors will feed into the microcontroller, as before stated, to complete various parameters that may be needed in the program. The different categories of sensors that are being considered are: Contact: An example of a contact sensor would be Vex Bumper Switch. This costs $12.99/unit. It requires 5.06 ounces to trigger. Saluki engineering company 11 Literature Review Figure 7: Vex Bumper Switch Distance: An example of this would be an encoder such as the Cytron Incremental Rotary Encoder. This costs $135.48/unit, requires an input of 5 V – 24 V and consumes approximately 120mA. This sensor also fulfills the requirement for positioning. Figure 8: Cytron Incremental Rotary Encoder Positioning: An example of this would be an ultrasonic sensor such as the Maxbotix LVMaxSonar-WR1 Weather Resistant Ultrasonic Range Finder. This costs $99.95/unit, detection ranges from 12” to 254” and has a 42KHz ultrasonic ping. Figure 9: Ultrasonic Range Finder Saluki engineering company 12 Literature Review Global Positioning System The GPS lawnmower has a lot of different types of GPS to choose from, but the main choice of GPS chips are from the company Parallax. The GPS use satellites orbiting Earth to receive a signal from the GPS chip and use it to pinpoint the location. It records the time the signal was sent and received by the satellite and sends information to other satellites to get their information. The more satellites being used, the more accurate the location will be. A minimum of three satellites must be used to calculate the two dimensional location for most GPS. More satellites must be used to be able to calculate the three dimensional location. The GPS chip in order to be effective must have a Wide Area Augmented System (WAAS). Another important part of the GPS chip is the NMEAD0183 which is the language the chip uses to produce the coordinates. Chip Name RXM-SG GPS Module GPS Receiver Module PBM 648 SiRF Number of Voltage Satellites 20 5V Accuracy NMEAD0183 WAAS Price ±20 yards Version 1 Yes $79.99 12 5V ±5 meters Version 1 Yes $79.99 20 3.3 – 5V ±5 meters Version 2.2 Yes $34.99 Table 6: GPS Chip Comparison Languages In order to properly integrate everything together and to get everything be automated, there will have to be a program to make it move, run the GPS chip, collect inputs from sensors, run the mower deck, and digitally map out the mowing area. Some possible programming languages that might be used are C, C++, Java, and Basic. Programming Language C C++ Java Basic Developer Microsoft Microsoft Sun John George Kemeny and Thomas Eugene Kurtz Programming Difficulty 5 2 2 5 Operating System Windows Windows Windows/Sun Any Table 72: Language Comparison Lawnmower The lawnmower is one of the most important components to the autonomous lawnmower project. Not only does it provide a basic framework for the computer components and electric motors to be placed on but it also provides parts that would normally not be available by Saluki engineering company 13 Literature Review themselves. Electric push lawnmowers are among the most commonly used mowers, information about these mowers are found in table 8. Types of Electric Push Lawnmowers Range Operation Time Lawn Size Corded Cordless Fixed (150-250 ft.) Unlimited ≈3000 square ft. Unlimited Battery Dependant ≈5000 square ft. Table 83: Electric Push Lawnmower Comparison Figure 10: Yardworks 18” 12A electric lawnmower Motors The motor, while part of the lawnmower, is crucial to power the blades under the mower deck. Like the lawnmower there is a choice between two types of motors: internal combustion and electric. The internal combustion engine is more common but electric motors are slowly gaining popularity. The electric motors for lawnmowers are typically 12V brushless motors weighing about 15-20 lbs. The benefits of the electric motors are that they run very quietly and they do not take up too much space on the mower chassis. The one drawback to electric motors is the power. Usually the more power needed out of the motor, the larger and heavier it gets. However, to turn the blades on a mower the power requirement is not high. Using a brushless motor also adds to the safety of the motor because it does not create sparks, like the brushed motor does, and it can be precisely controlled. Saluki engineering company 14 Literature Review Figure 11: Marathon Electric Brake Motor Wheels The wheels and motors that have been acquired for the autonomous lawnmower are from the company Sunrise Medical. These were given to Southern Illinois University Carbondale by Adam Sims’ senior design team. Below is a table of the wheel specifications for the acquired wheels. Wheel type Motor Diameter Width Control box Volts RPM Spindle None 8 inches 2 inches None None Unknown Electric wheel Fracmo, brushed motor 12.5 inches 2.5 inches VSI joystick – Discontinued 22.5 min. or 24 max. 114 Table 9: Wheel Specifications There are two spindle, or free moving, wheels that are going to be used for the front of the design. The spindle wheels will be attached to the front of the lawnmower frame by using a three hundred and sixty degree spinning attachment that came attached to the wheels. A type of suspension system might be used in the final design to compensate for the irregularities of the ground. Figure 12: Acquired Spindle Wheel At the end of the project, the electric powered wheels will be the drive system for the machine. The same process as a zero turn riding lawnmower will be applied to make the turning radius of the machine as minimal as possible. They will be attached to the rear of the Saluki engineering company 15 Literature Review lawnmowers’ frame to get the full effect of the zero turn process. The zero turn lawnmower spins the wheels in opposite directions to turn effectively left or right. These wheels will be attached securely to the frame to insure that they do not come off in the process of turning or moving. Due to the specifications in table 14, the autonomous lawnmower will need to have two 12 Volt batteries attached in series for a single motor to run. Figure 13: Motorized Wheels The motor should be wired to a control box that connects to a Voltage Source Inverter joystick. The joystick is the steering mechanism that would allow the lawnmower to turn in a circle or away from an obstacle. The VSI joystick that is needed is now no longer available to the general public. Also, it cannot be tampered with or worked on due to magnetic sensitive components. The VSI joystick was the only item that could not be found in the machine shop on campus. Since the VSI joystick cannot be found or replaced in the foreseeable future, two options are available: get a new set of electric motors and wheels, or splice the wires that would go to a control box and try to manipulate the motors by changing the polarity of the batteries by using a mechanical and electrical system coupled with a computer program. Figure 14: Battery hookup (top) Figure 15: Control Box hookup (bottom) Saluki engineering company 16 Literature Review Works Cited Purdie, Tom. Interview. Rachel Parth. 5 October 2011. Team 94 Saluki Engineering Company Lawnmower-Design Report : 2009. Trevor Parnell, Adam Sims, Krishna Patel CWRU Cutter C Technical Report: 2010. Case Western Reserve University, 10900 Euclid Avenue, Cleveland, Ohio, 44106, USA http://alternatives.rzero.com/lang.html Java information. http://en.wikipedia.org/wiki/Java_(programming_language) C. http://www.eskimo.com/~scs/cclass/notes/sx1.html C++. http://www.cprogramming.com/begin.html Visual Basic. http://en.wikipedia.org/wiki/Microsoft_Visual_Studio GPS Receiver Module. http://www.parallax.com/Portals/0/Downloads/docs/prod/acc/GPSManualV2.0.pdf RXM-SG GPS Module w/Ext Antenna. http://www.parallax.com/Portals/0/Downloads/docs/prod/acc/28505-RXM-SG-GPSModulev1.0.pdf Northern Arizona wind and sun. http://www.windsun.com/Batteries/Battery_FAQ.htm http://www.wind-sun.com/ForumVB/showthread.php?t=8228 Wheeled Robot picture: http://news.cnet.com/8301-17938_105-10378593-1.html Tracked Robot picture: http://defenseupdate.com/features/2008/november/11208_minirobotugv_urbancombatindoor.html “The AC’s and DC’s of Electric Motors”, A.O. Smith, Retrieved 2009/12/07 http://www.aosmithmotors.com/uploadedFiles/AC-DC%20manual.pdf http://thelawnmower.info/history.php “Push for more Efficient Mowers”, Published May 05, 2008. http://www.metronews.ca/vancouver/live/article/48994