Network Planning of the CATV communication networks
advertisement

Network Planning of the CATV
communication networks
Arthur, K. W. Peng, OPLAB
d6725005@im.ntu.edu.tw
Advisor: Frank Yeong-Sung Lin
April 22, 2005
Agenda
Introduction
Problem Description and Formulation
Formulation Analysis and Reformulation
Numerical Experiments
Conclusion
Q&A
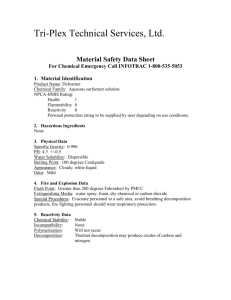
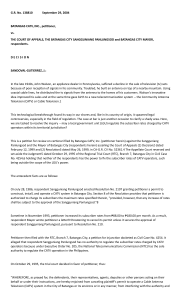
CATV Communication Network
Technology
TRUNK
NETWORK
Satellite dish
Trunk
Amplif ier
Head End
Radio tower
Bridger
Amplif ier
Splitter
Direction
Couplers
Tap
Distribution
Network
Line Extender
Telev ision
The Network Structure of CATV Networks
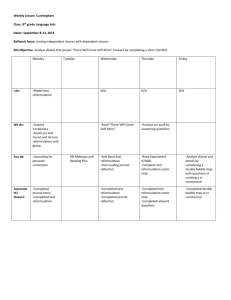
Network Planning --Traditional Approaches
製圖
幹線系統設計
餽線系統設計
反向系統設計
幹線系統設計
頭端幹線系統
餽線系統設計
Figure 2-10
餽線系統設計
相對信號位準與損失的系統點
反向系統設計
Similar to the design of downlink.
Noise Funneling
Limit the number of branch and amplifier.
Addressable Bridger Leg Switch
前向---反向放大器
CAD Tools
The traditional way is calculation-intensive
and repetitive.
Comparison of the CAD tools[Yermolov,2000]
CATV CAD: Gen Enterprise Ltd.
Symplex Suite of software: SpanPro Inc.
Program System:Lode Data Corporation
CADIX International Inc.
Cable Tools: Goldcom Inc.
Feature
Auto-tracking the signal quality.
Helping the design to calculate the network
requirement, cost, etc.
The design is still depend on the experience of the
network designer.
CATV Network Planning Tools
•Stand-alone version
•Web-based version
Mathematical Formulation and
Network Optimization
Basic ideas: formulate the network and using
network optimization technique to find the optimal
solution.
Head End
Al
Gv
CNR
X-MOD
Fl
Mv
l
Ov
Bv
Fv
Gv
Fv
Mv
Av
(link ) ( equipment )
CNR
X-MOD
CSO
CTB
User
Performance Requirements
Performance requirements in
downstream
CNR (Carrier to Noise Ratio) ≧43dB
X-MOD (Cross Modulation ) ≦-46dB
CSO (Composite Second Order) ≦-53dB
CTB (Composite Triple Beat) ≦-53dB
Performance Requirements
(cont’d)
Performance requirements in upstream
Problem Formulation
Problem description
Given :
downstream performance objectives
upstream performance objectives
specifications of network components
cost structure of network components
number and position of endusers
terrain which networks will pass through and the
associated cost
Determine:
routing
allocation of network components
operational parameters (e.g., gain of each amplifier)
Problem Formulation
Features
Nonlinear problems
Hard to solve directly by standard methods
Some techniques needed
Problem Decomposition
Steiner Tree Problem
Network Optimization
Geometric Programming
Posynomial form
Gradient-based Optimization
Problem Decomposition and
Reformulation
Part I: Steiner Tree Problems
min yl Cl
lL
(13) v yl 1
v V
(14) yl 0 or 1
l L
(15) pl x p yl | W |
l L
lLin
wW pPw
(16) x p 1
w W
(17) x p 0 or 1
p Pw , w W
pPw
Problem Decomposition and
Reformulation (cont’d)
User3
Head End
User1
User2
Steiner vertices
regular vertices
Problem Decomposition and
Reformulation (cont’d)
Heuristic approximation algorithms
Minimum Cost Paths Heuristic (MPH)
G (V , E , d )
S V
S {v1 , v2 , v3 ,..., vk }
PATH (W , s ) : shortest path from a connected component W
to a vertex s in G
( PATH (W , s )) : the cost of Path(W,s)
step 1 : V1 {v1}
step 2 : for each i 2 ,3,...,k do
find a vertex vi in S-Vi-1 such that
PATH(Vi-1 ,vi )) min{ ( PATH(Vi-1 ,v j )) | v j S-Vi-1}
Vi add PATH(Vi-1 ,vi ) to Vi-1
Problem Decomposition and
Reformulation (cont’d)
Problem Decomposition and
Reformulation (cont’d)
Part II
min [d1 ( Al )1 ] {z v [d 2 ( Fv ) 1 d 3 (Gv )1 d 4 ( M v )1
lL
vV
1
1
1
1
1
d 5 ( Bv ) d 6 (Ov ) ] z v [d 7 ( Fv ) d 8 (Gv ) d 9 ( M v ) ]
z v [d10 ( Av )1 ]}
L : the set of links in the given candidate topology
V : the set of nodes in the given candidate topology
s.t.
Problem Decomposition and
Reformulation
(cont’d)
H
H
pc
pc
(1) Si Gpi Api Apjpj 10
i 1
j 1
pn
H pc
z
(2) (
n 1
H pc
n 1
n 1
i 1
j 1
n
H pc
pi
pi
(4) z ( Bpi )
i 1
H pc
) 10
59
Csys
10
S Gpi Api Apjpj * 10 10
(3) z ( M pi )
i 1
Fpn
w W
0.5
0.5
n 1
Gpi Api Apjpj 10
i 1
j 1
n
n 1
Gpi Api Apjpj 10
i 1
j 1
n
n 1
i 1
j 1
w W
M sys
10
Bsys
10
*0.5
*0.5
Osys
10 W
(5) z (Opi ) Gpi Api Apjpj 10w
i 1
pi
1
Problem Decomposition and
Reformulation (cont’d)
H pc
(6) Gpi Api Apj 1
H pc
i H pv
j H pv
w W v V p
Csys
1
5.9
0.5
(7) s 10 Ft ( z v z v ) 10 10 w W
vV p
vVP
V p : the node set of path p
VP : the node set of path set P
Decision Variables :
Gv : gain of upstream amplifier
s : input signal strength to upstream amplifier
Ft : noise figure of upstream amplifier
Problem Decomposition and
Reformulation (cont’d)
(8) zpi ( M t ) 0.5 s Gpi 10
H pc
M sys
10
*0.5
i 1
Decision Variable :
M t : cross modulation of upstream amplifier
w W
Solution Approaches
Posynomial problem
min
g 0 (t )
s.t. : t1 0 , t 2 0 , ... , t m 0
g1 (t ) 1 , g 2 (t ) 1 , ... , g p (t ) 1
g k (t ) c t
iJ [ k ]
ai 1 ai 2
i 2
2
t
...t maim , k 0, 1, ..., p,
aij : arbitrary real numbers
ci : positive
gk(t) : posynomials
(IP)
(1)
(2)
Solution Approaches (cont’d)
Dual problem
n
max v ( ) [ (
i 1
ci
i
p
) i ] k ( ) k ( )
k 1
s.t. : 1 0, 2 0, ... n 0
i 1
a ij i 0
i 1
k ( ) i ,
iJ [ k ]
Positivity condition
Normality condition
jJ [ 0 ]
n
(IP)
j 1,2,..., p
k 1,2,..., p
Orthogonality condition
Solution Approaches (cont’d)
Penalty method
min
n
ln v( ) J 1 ( i 1) J 2 ( aij i ) 2 j 1,2,..., m
2
iJ [ 0 ]
i 1
where J 1 and J 2 are large positive numbers.
Steepest descent method
Rounding procedure
Computational Experiments
Solution modules
Module 1
Determining the Interconnection and
Routing of CATV Networks
Module 2
Determining Locations to Place
Amplifiers
Module 3
Determining Configurations and
Parameters of CATV Components
Module 4
Determining Configurations and
Parameters of CATV Reverse Modules
Computational Experiments
91
100
90
81
71
80
61
70
51
60
41
50
31
40
21
30
11
20
1
2
3
4
5
6
7
8
9
10
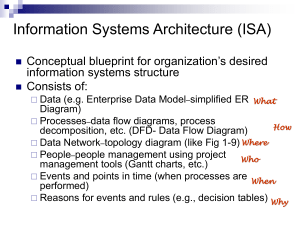
Computational Experiments
The constructed steiner tree
91
100
90
81
71
80
61
70
51
60
41
50
31
40
21
30
11
20
1
2
3
4
5
6
7
8
9
10
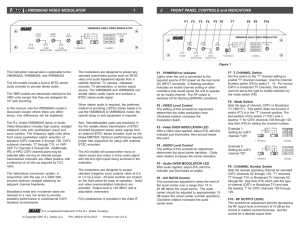
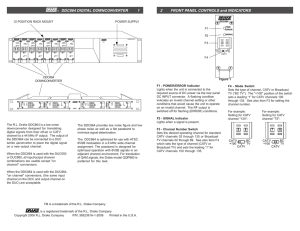
Computational Experiments
Deciding the locations and parameters
of amplifiers
91
100
zg=0.053235
81
90
71
zg=0.064211 80
61
70
51
60
41
50
31
zg=0.064212
21
30
11
1
40
20
zg=0.117608
2
3
4
5
6
7
8
9
10
Conclusion
It is feasible to use mathematical
programming methods in CATV network
planning
The solution provided by this approach can
be used to evaluate the QoS in many
situation.
As a core module, we can add more features:
New network components
New Services
Future Research Directions
Network Planning and Management
CATV network planning and optimization
Layering
QoS
Fault tolerance/Reliability
CATV network performance
Capacity management
Admission Control
Q&A