EFI - Google Project Hosting
advertisement

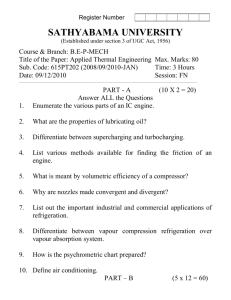
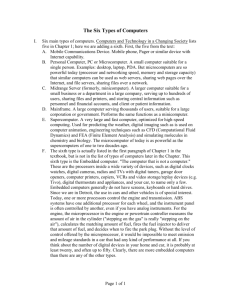
ELECTRONIC FUEL INJECTION IN TWO STROKE SI ENGINE USING VIRTUAL INSTRUMENTATION F87 Project Work Submitted in partial fulfillment for the requirement of B.E. degree in Mechatronics Engineering of Anna University Submitted by T.R.POTHIKAN SURESH (Reg. No: 03 F 15) G.VIVEK SHANKAR (Reg. No: 03 F 40) Guided by Lect . T .Vivek Department of Mechanical Engineering THIAGARAJAR COLLEGE OF ENGINEERING (An Autonomous Institution Affiliated To Anna University) MADURAI – 625 015 March 2007 THIAGARAJAR COLLEGE OF ENGINEERING (An Autonomous Institution Affiliated to Anna University) MADURAI – 625 015. CERTIFICATE Certified that this is a bonafide record of the F87 Project Work & Viva Voce done by Mr .T.R.Pothikan Suresh (Register Number 03F15) and Mr G.Vivek Shankar ((Register Number 03f40) of Eight/Seventh Semester B.E. (Mechatronics Engineering) during the year 2006 - 2007. Signature of the Guide Signature of H.D.M.E Station: Madurai Date: Submitted for Viva-Voce examination held at Thiagarajar College of Engineering, Madurai – 625 015, on __________________. INTERNAL EXAMINER EXTERNAL EXAMINER H.D.M.E. CERTIFICATE This is to certify that the F87 Project Work Report entitled “Electronic Fuel injection in two stroke SI engine using Virtual Instrumentation ” , being submitted by T.R.Pothikan Suresh and G.Vivek Shankar in partial fulfillment for the requirement of Bachelor of Engineering Degree in Mechatronics, is a record of bonafide work. The results embodied in this report have not been submitted to any other university or institute for the award of any degree or diploma. Mr/Ms. Dr/Prof. (B.E. STUDENT) (GUIDE) Station: Madurai Date: ACKNOWLEDGEMENT We express our profound sense of gratitude and indebtedness to our guide Mr.T.VIVEK for his valuable guidance, suggestions and sincere efforts for obtaining perfection in this project work and for me personally in all aspects. We wish to declare our deep sense of thanks to Dr.N. JAWAHAR, Head of Department, Department of Mechanical Engineering, for his valuable and timely instructions that he had given at various stages of this project work. We owe our sincere gratitude and thanks to our Principal Dr. V. ABHAIKUMAR for his encouragement and support to do our project work. We would like to thank Mr.B.KUMARAN, Product Engineer, Gasoline Systems, Bosch India Ltd. We express our sincere thanks to lab assistants of our department workshop and carpentry shop for their technical support and immense co-operation in the fabrication of our project work. T.R.POTHIKAN SURESH G.VIVEK SHANKAR ABSTRACT There are an estimated 70-100 million 2-stroke cycle engines in Asia, powering motorbikes, mopeds, three wheelers, tuk-tuks, and tricycles. These 2-stroke engines are characterized by very high levels of hydrocarbon (HC), carbon monoxide (CO), and particulate (PM) emissions. These high emissions levels are primarily caused by “scavenging losses” produced when the fresh air/fuel mixture is used to flush the exhaust gases from the previous stroke out of the engine; over 35% of the fuel is typically lost in the scavenging process. The application of direct in-cylinder fuel injection (or “direct injection” – DI) can be used to reduce HC and CO emissions by over 70%. The DI technology reduces fuel consumption by approximately 35% and dramatically reduces particulate emissions. The traditional carburetor should be replaced by a fuel injector in the DI technology. The fuel injector is of solenoid actuated type i.e., the fuel injection is controlled by means of pulse width modulated signal given to it. The technology for producing the pulse width modulated signal for actuating the fuel injector is proposed in this project. CHAPTER 1 INTRODUCTION In the face of the twin crisis arising from the fossil fuel depletion and environmental degradation, it has become essential to invent new technologies to improve fuel efficiency and reduce pollution in the automobile sector. Many countries have abandoned the usage two-stroke engines in automotive applications due to their high level of emissions and poor fuel efficiency. But the inherent advantages of two-stroke engine as compared to the four stroke engine have been understood for more than a century. Over the years, various methods have been suggested to improve the power output and to reduce the exhaust emissions from two-stroke petrol engines. Of the various methods available for reducing emissions, fuel injection has proved to be the most efficient. Motorcycles and motorized scooters are a popular form of transport throughout the world. They are particularly popular in congested cities in Europe and Asia. In some Asian regions they are the dominant mode of transport because of their low initial and ongoing running costs. Traditionally, two stroke engines have powered the most popular models of motorcycles and scooters. Two stroke engines are popular because they produce relatively high power from a small size and are also inexpensive to manufacturer and maintain. The major drawback of a two stroke powered motorcycle or scooter is the high level of noxious exhaust emissions they emit. A hallmark of traditional two stroke products is the plume of blue smoke emanating from their exhaust pipe. In some congested cities pollution from two stroke motorcycles is seen as a major contributor to poor air quality and adverse human health effects. Local and national governments throughout the world have sought by various means to reduce the contribution to poor air quality made by uncontrolled two stroke motorcycle products. These ranges from a total ban of motorcycles within prescribed city limits (eg Beijing); the prohibition of the importation of two strokes (eg Singapore) or the imposition of strict emissions regulations (eg Europe, Taiwan, India). Because of the predominance of two stroke products in the major markets and the associated fixed investment in their manufacture there are many difficulties surrounding attempts to ban these products. There are also social issues in attempts to restrict their use, as two stroke products are the most affordable in developing nations. The technique used in this work is to develop a control system for the fuel injection based on virtual instrumentation techniques using Lab VIEW software. The system monitors the various aspects of the system by receiving data from various sensors in real time and regulating the quantity of fuel to be injected into the engine. The PCbased virtual instrumentation program using LabVIEW software sets the timing through the pulse width for the injector and the start of fuel injection. The necessary modifications carried out in the engine to adopt the fuel injection system along with measuring instruments and experimental results are discussed here. CHAPTER 2 LITERATURE REVIEW [1] Yuanchun Li, Guangjun Liu, and Xiao Zhou, Fuel-Injection Control System Design and Experiments of a Diesel Engine , IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 11, NO. 4, JULY 2003 [2] V. K. Jones, Brian A. Ault, Gene F. Franklin, Fellow, IEEE, and J. David Powell , Identification and Air-Fuel Ratio Control of a Spark Ignition Engine , IEEE TRANSACTIONS ON CONIKOL SYSTEMS TECHNOLOGY. VOL. 3. YO. I, MARCH 1995 [3] ANDREA BALLUCHI, LUCA BENVENUTI,MARIA DOMENICA DI BENEDETTO, SENIOR MEMBER, IEEE, CLAUDIO PINELLO, AND ALBERTO LUIGI SANGIOVANNI-VINCENTELLI, FELLOW, IEEE , Automotive Engine Control and Hybrid Systems:Challenges and Opportunities [4] Chen-Fang Chang, Nicholas P. Fekete, Alois Amstutz, and J. David Powell , Air-Fuel Ratio Control in Spark-Ignition Engines Using Estimation Theory , lEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 3, NO. 1. MARCH 1995 [5] P.F.Puleston, S.Spurgeon and G.Monsees , Automotive engine speed control: A robust nonlinear control framework [5] John J. Moskwa and J. Karl Hedrick , Nonlinear Algorithms for Automotive Engine Control [6] Giorgio Rizzoni,member IEEE , Estimate of Indicated Torque from Crankshaft Speed Fluctuations: A Model for the Dynamics of the IC Engine, IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 38, NO. 3, AUGUST 1989 [7] Duksun Shim, Jaehong Park, Pramod P. Khargonekar, and William B. Ribbens , Reducing Automotive Engine Speed Fluctuation at Idle , IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 4, NO. 4, JULY 1996 [8] Pierre Bidan, Serge Boverie, and Vincent Chaumerliac , Nonlinear Control of a Spark-Ignition Engine , IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 3, NO. 1, MARCH 1995 [9] Jeffry A.Cook and Barry K.Powell , Modelling of internal combustion engine for control analysis [9]John F.Cassidy JR.,member ,IEEE,Design of electronic automotive engine controls using quantitative control theory [10] Uwe Kiencke , A view o1, 1995 [9] Jeffry A.Cook and Barry K.Powell , Modelling of internal combustion engine for control analysis [9]John F.Cassidy JR.,member ,IEEE, Design of electronic automotive engine controls using quantitative f automotive control systems [11] Toru Kakehi, Katsumasa Matsui, Masahiro Ohba, and Tsutomu Tabe , Parallel Processor Configuration for Automotive Control [12]Davorin Hrovat and William F.Powers , Computer control system for automotive power trains [13] Brian D.O. Anderson , Controller design:moving from theory to practice [14] J.Jiang , Optimal gain scheduling controller for diesel engine [15] R. E. Bellman and E. S. Lee , History and Development of Dynamic Programming [16] John R. Wagner, Member, IEEE, Darren M. Dawson, Senior Member, IEEE, and Liu Zeyu , Nonlinear Air-to-Fuel Ratio and Engine Speed Control for Hybrid Vehicles , IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 52, NO. 1, JANUARY 2003 [17] Paul Herman and Matthew A. Franchek , Engine Idle Speed Control Using Actuator Saturation , IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 8, NO. 1, JANUARY 2000 [18] Masakatsu Nomura, Member, IEEE, Masahiko Suzuki, Michitaka Hori, Member, IEEE, and Masayuki Terashima, Member, IEEE , Decoupling Torque Control System for Automotive Engine Tester , IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 36, NO. 2, MARCH/APRIL 2000 [19] Yong-Wha Kim, Giorgio Rizzoni, and Vadim Utkin , Automotive engine diagnosis and control by non linear estimation [20] Yaojung Shiao and John J. Moskwa , Cylinder Pressure and Combustion Heat Release Estimation for SI Engine Diagnostics Using Nonlinear Sliding Observers , IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY. VOL. 3, NO. I . MARCH 1995 [21] GEORG F.Mauer , On-Line Cylinder Fault Diagnostics for Internal Combustion Engines , IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 37. NO. 3, JUNE 1990 [22] Byron J. Bunker, Matthew A. Franchek, Member, IEEE, and Bruce E. Thomason , Robust Multivariable Control of an Engine-Dynamometer System , IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 5, NO. 2, MARCH 1997 [23] George Vachtsevanos , Shesu S.Farinwata and Dimitrios K.Pirovolou , Fuzzy logic control of an automotive engine [24] J. C. Basilio and S. R. Matos , Design of PI and PID Controllers With Transient Performance Specification, IEEE TRANSACTIONS ON EDUCATION, VOL. 45, NO. 4, NOVEMBER 2002 [25] Michael Gerstile, Dr Edward G Groff, Evaluation on Two-Stroke Engines Scavenging Models, http://www.sae.org/technical/papers/970358 CHAPTER 3 PROBLEM DESCRIPTION 3.1. CONVENTIONAL TWO STROKE SI ENGINES The conventional two stroke engines have their inherent advantages as listed below, Has more get-up-and-go because it fires once every revolution, giving it twice the power of a four stroke, which only fires once every other revolution. Packs a higher weight-to-power ratio because it is much lighter. Is less expensive because of its simpler design. Can be operated in any orientation because it lacks the oil sump of a four stroke engine, which has limited orientation if oil is to be retained in the sump. But despite of the above mentioned advantages, the two stroke engines are banned in many countries due to the following reasons , It is fuel-inefficient because of the simpler design, resulting in poorer mileage than a four stroke engine Each time a new mix of air/fuel is loaded into the combustion chamber, part of it leaks out through the exhaust port – Scavenging 3.2. REASONS FOR FUEL INEFFICIENCY The main reasons for fuel inefficiency of the two stroke engine is that the improper air-fuel ratio of the charge mixture at different speed of the engine and due to the loss of a part of gasoline during scavenging. 3.2.1. Scavenging Effect in Two Stroke Engines In two-stroke internal combustion (IC) engines, each outward stroke of the piston is a power stroke. To achieve this operating cycle, a fresh charge of air and fuel must be supplied to the engine cylinder at a high enough pressure to displace the burned gases from the previous cycle. The combined intake and exhaust process that clears the cylinder of burned gases and fills it with a fresh mixture (of air and fuel) is called scavenging. An analysis of scavenging is very important as it plays a major role in determining the efficiency of an IC engine. Though scavenging effect is useful for pushing out the exhaust gases from the engine cylinder, some part of gasoline in the fresh charge is wasted and thus resulting in fuel inefficiency of the two stroke engine. Due to the effect of scavenging 30% of the fuel escapes unburned. The corollary of this statement is that if no fuel gets wasted during scavenging effect, the fuel efficiency will be increased by 30%. i.e. ., a normal 100cc bike with a two stroke SI engine giving a mileage of 45 kmpl will give a mileage of 58.5 kmpl if there is no wastage of gasoline during scavenging. CHAPTER 4 DESCRIPTION OF THE SETUP The complete description of the components used and the experimental setup are explained in this chapter. The sketch view of the experimental setup consisting of the engine and the computer is shown in the figure 4.1. Fig 4.1. Sketch View of the experimental set up 4.1. ENGINE SPECIFICATIONS The engine used for the experiment is the “IND SUZUKI” two stroke SI engine which runs on gasoline fuel. The constructional and the technical specifications of the engine are given in the tables listed below, IND SUZUKI SI ENGINE Type 2 stroke, air cooled Intake system Reed value Bore 50.0 mm Stroke 50.0 mm Piston displacement 98.2 cc Starting system Primary Kick Lubrication system Suzuki "CCI" Compression ratio 6.7:1 Table 4.1. Constructional Details of the Suzuki Engine ELECTRICAL System DC type Ignition type PEI (Electronic) Ignition timing 24° ± 2° B.T.D.C. @3000 RPM Spark Plug NGK-BP7HS, MODI Champion L82YC, MICO W5BC Battery 12V 2.5 Ah / 10HR Generator Flywheel Magneto 60 W Fuse 10 A Table 4.2. Electrical Specifications of the Suzuki engine 4.2. INTERFACE DEVICES The interface devices are used to interface the output of the sensors with the Virtual Instrumentation (VI) program. These devices consists of amplifiers, signal conditioning circuits and A/D converters to condition the output signal from the sensors before sending it to the computer in a digital form. The following are the interface devices used to acquire signals from the sensors with the use of a computer. 4.2.1. NI PCI - 6024E The PCI-6024E is an I/O board with 16 single or 8 differential analog input (A/D) channels (12-bit) with a maximum sample rate of 200 kHz, 2 analog output (D/A) channels (12-bit), 8 digital input and output lines, and 2 counter/timers (24-bit) with a maximum source clock rate of 20 MHz. Fig 4.3. PCI 6024 E – Data Acquisition Card The general specifications of PCI 6024E – Data Acquisition Card is given below, Board name PCI-6024E Manufacturer National Instruments Bus type PCI Access method Memory mapped Multiple block instance A/D: No, D/A: No, Digital I/O: Yes; Period/Pulse width support measurement: Yes; Pulse train Generation: No Multiple board support Yes Table 4.3. Specifications of PCI-6024E 4.2.2. BNC – 2120 The BNC-2120 Series are shielded connector blocks with signal-labeled BNC connectors for easy connectivity of analog input, analog output, digital I/O and counter/timer signals to the multifunction DAQ device, including analog output devices. The BNC-2120 work with all E Series and Basic multifunction DAQ devices. The BNC2120 also provides a function generator, temperature reference, thermocouple connector, and LED to test the functionality of the hardware. The BNC-2120 has eight BNC analog inputs and two BNC analog outputs for connecting to the extended I/O channels of the 100-pin E Series DAQ devices. Fig 4.3 BNC 2120 – Front Panel 4.3. SOFTWARE USED – LabVIEW LabVIEW is a graphical programming system that is designed for data acquisition, data analysis, and instrument control. LabVIEW can run on a number of systems including PC Windows, Macintosh and VXI systems, and is transportable from one system to another. Programming an application in LabVIEW is very different from programming in a text based language such as C or Basic. LabVIEW uses graphical symbols (icons) to describe programming actions. Data flow is ``wired" into +a block diagram. Since LabVIEW is graphical and based on a windows type system it is often much easier to get started using it than a typical language. Many engineers and scientists that would not normally try to program an application can get usable output easily with LabVIEW. LabVIEW programs are called virtual instruments (VIs) because the appearance and operation imitate actual instruments. VIs may be used directly by the user or as a subroutine (called sub VI's) of a higher program which enables a modular programming approach. The user interface is called the front panel, because it simulates the front panel of a physical instrument. The front panel can contain knobs, push buttons, graphs, and other controls and indicators. The controls can be adjusted using a mouse and keyboard, and the changes indicated on the computer screen. The block diagram shows the internal components of the program. The controls and indicators are connected to other operators and program structures. Each program structure has a different symbol and each data type (e g. integer, double-float etc) has a different color. 4.4. SENSORS USED The requirement of the developed virtual instrumentation program was to control the quantity of fuel injected into the inlet manifold of the engine. Various parameters like throttle position, manifold absolute pressure, amount of oxygen in exhaust gas, engine speed, etc., can be used to determine the quantity of fuel to be injected. For the development program it is decide that throttle position, manifold absolute pressure and speed data were sufficient to calculate the fuel quantity. The 10 volts DC output from the engine is used as input supply for the working of all the sensors discussed below. Two types of sensors are used to acquire information regarding the condition of the engine. They are, 1. Throttle Position sensor 2. Proximity sensor 4.4.1. Throttle Position Sensor The throttle position sensor used is a linear scale rotary potentiometer. This is a three-wire device employing a 10 volt supply, an earth connection and a variable output from the centre pin. Fig 4.2 Potentiometer – Throttle Position Sensor Wide-open throttle requires more fuel to be injected. Closed throttle requires only the minimum quantity of fuel to keep the engine in idle running condition for no load. Closed throttle was set to 0 volts and wide open (full) throttle was set to a maximum of 10 volts in the potentiometer. This throttle potentiometer indicates to the ECU the exact amount of throttle opening. A throttle switch is unable to give precise positions of opening, but a throttle potentiometer can give precise openings due to its linear output. The majority of modern engine management systems employ this particular sensor. 4.4.2. Proximity Sensor This sensor known as a Crank Angle Sensor (CAS) or sometimes Crankshaft Position Sensor (CPS) is mounted near the distributor of the engine. A 10V DC input is given to the input of the proximity sensor and the output is fed to the analog input channel (1) of the DAQ card (BNC 2120) which is connected to the 6024E card. The output signal produced, is used by the virtual instrumentation program to determine the exact position of the engine. To inject the fuel for every individual cycle, the proximity sensor is positioned in such a way that it will produce an active high signal, whenever the piston covers the exhaust port of the engine. This signal is used to trigger the injector and to perform the rpm calculation. M18 inductive type proximity sensor is used for sensing the crank angle of the engine shaft. 4.4.2.1. M18 Proximity Sensor Description Environment-proof self-contained proximity sensor enclosed in a rugged hermetically sealed ceramic/stainless steel housing, designed to meet the requirements of ground mobile and naval applications. Operation by the Eddy Current Killed Oscillator (ECKO) principle, which is used to detect metallic objects passing in front of the sensing face. Once a target metal is detected, a trigger signal is produced which is then passed through the output conditioning circuitry to give a high output. Features : All metal sensing Integral VG95328 (MIL-C-26482) connector Built In Test function (BITE) High level of electronics protection Specifications : Sensing Characteristics : Switching function Normally open, current sinking Minimum actuation distance 4.16 mm Maximum release distance 7.27 mm Switching hysteresis 0.04 Sh 1.50 mm Reproduceability 0.073 mm Response time/actuation/BITE 2/10 ms Power on delay 100 ms Electrical Specifications : Operating voltage 12 to 32 V Ripple 8.4 Vss at 30 Hz - 10 kHz VG86916, 75, 4.4.2 Impact potential/voltage peaks 70 Vs at 2 ms, 50 Vs at 50 ms VG86916, 75, 4.4.2 Current consumption without load 15 mA Output-Voltage drop 2.0 V at 80 mA Current carrying capacity (oHmic) 80 mA Residual current 100 mA Short circuit protection Yes Reverse polarity protection Yes Input Characteristics : BITE on input voltage 3.5 V Von 6.0 BITE off input voltage Voff 0.8 V Insertion loss 8 kOhm Environmental Conditions : Operating temperature -35° to +63° C Storage temperature -35° to +63° C VG95332, B1. 22/23 Temperature shock > 1° C/min Humidity, storage 95% at +40° C, 4x24 hours VG95332, B1.6 Humidity, operation 95% at +44° C, 1x24 hours VG95332, B1.5 Salt mist 1 cycle, 48 hours VG95332, B1.14 Degree of protection IP54 Vibration 1.5 geff 60-400 Hz geff 400 - 2000 Hz Bump 60 x 10 g at 6 ms VG95332, B1.11 Shock 18 x 500 g at 0.5 ms VG95332, B1.16 Resistance to fuel Aircraft fuel, oil, grease, protective agents AWE II 10.02.92 EMC : Insulation resistance ³ 10 m Ohm at 500 V Contact resistance 5 m Ohm at 100 mA Guided interference transmissions GKL2, 10 kHz - 100 MHz VG95373, LA-01-G Guided interference voltage GKL2, 30 Hz - 100 MHz VG95373, LA-02-G Guided interference voltage 60 Vs at 2 ms, 2.5 Vss at 0.03-10 kHz VG95373, LA-03-G Magnetic flux density GKL2, 30 Hz - 200 kHz VG95373, SA-01-G Magnetic field intensity GKL2, 15 kHz - 30 MHz VG95373, SA-02G Electromagnetic field intensity GKL2, 30 MHz - 100 MHz VG95373, SA-04-G Immunity from noise, supply wiring GKL4, 30 Hz - 10 kHz VG95373, LF-01-G Impulse stability, supply wiring GKL4 VG95373, LF-04-G Guided immunity 114 dB mA, 10 kHz - 100 MHz DEF-STAN 5941, DCS, 02 Electrostatic discharge GKL2 VG95373, LF-05-G Magnetic immunity GKL2, 10 kHz - 200 kHz VG95373, SF-01-G Electromagnetic immunity GKL2, 30 MHz - 100 MHz VG95373, SF-03-G Mean Time Between Failure prediction 0.106 hrs x 106 at GM MILHDBK-217 F 4.5. GASOLINE DIRECT INJECTION The concept/method used in this project to overcome the disadvantages of the conventional two stroke SI engines such as fuel inefficiency and increase in pollution is the introduction of GDI in the traditional two stroke SI engines. Direct in-cylinder fuel injection (direct injection, DI) is a technology that has shown the ability to greatly reduce emissions from two-stroke engines. In a DI system the carburetor is eliminated, and the fuel is introduced into the combustion chamber via an injector mounted in the top of the chamber’s cylinder head. This allows exhaust products to be scavenged from the cylinder using air only. Fuel is injected into the cylinder later in the cycle, greatly reducing the amount of unburned fuel that is allowed to escape during scavenging. The DI process allows for a locally rich region around the spark plug, eliminating the need for enrichment of the entire cylinder to achieve stable combustion. Elimination of rich air/fuel ratios significantly reduces carbon monoxide emissions. Fig. 3.4. Difference in operation between carbureted and Direct-injected two stroke gasoline engines GDI enables stratified charge (ultra lean burn) combustion for improved fuel efficiency and emission levels at low load. Further improving efficiency and high-load output-power, the engine power is governed by modulating fuel injection, like a diesel engine; as opposed to restricting intake airflow, like a conventional gas internal combustion engine. 4.5.1 Advantages of GDI: The major advantages of a GDI engine are increased fuel efficiency and high power output. This is achieved by the precise control over amount of fuel and injection timings which are varied according to the load conditions. In addition, there are no throttling losses when compared to a conventional fuel injected or carbureted engine, which greatly improves efficiency. Basically, the engine management system continuously chooses between three different modes of combustion: ultra lean burn combustion, stoichiometric combustion, and high power output mode. Each mode is characterized by air-fuel ratio, the amount of fuel in the air-fuel mixture; the stoichiometric ratio is 14.7 to 1 by weight, but in ultra lean mode, it could be as high as 65 to 1. These leaner mixtures than those ever achieved in the conventional engines are desired because of reduced fuel consumption. Ultra lean combustion mode is effective under normal running conditions, when little acceleration is required. The fuel is injected at the latter stages of the compression stroke, so that the small amount of air-fuel mixture is optimally placed just near the spark plug. This stratified charge is surrounded by mostly air which keeps the fuel away from the cylinder walls for lowest emissions. The combustion takes place in a toroidal cavity on the piston's surface. This technique enables the usage of ultra lean mixtures with very high air-fuel ratio, impossible with traditional carburetors or even intake port injection. Stoichiometric combustion mode is activated for moderate load conditions. In this mode, fuel is injected when the piston covers the exhaust port. The airfuel mixture is homogeneous with the stoichiometric rates. In full power mode, the air-fuel mixture is homogeneous as well and contains the minimum mass of fuel over the amount required for stoichiometric that is possible to ignite without knocking out, as defined by the compression ratio of the engine and the mass of air in the combustion chamber. The fuel is injected during the intake stroke. This mode activates at high load conditions and provides maximum output and torque. . CHAPTER 5 PRESENT WORK For precise fuel injection the following engine parameters are to be monitored 1. Throttle Position 2. Crank Angle Position 3. Manifold absolute pressure This chapter explains how these parameters are measured using the sensors and how these parameters influences the fuel injection control. 5.1. THROTTLE POSITION MEASUREMENT The position of the throttle valve is measured by the throttle position sensor. A 10V DC input is given to the input of the potentiometer and the output is fed to the analog input channel (0) of the DAQ card (BNC 2120) which is connected to the 6024E card. This input which varies from 0-10V is configured using Measurement and Automation Explorer. The above block diagram is a simple VI program to obtain the signal from the TPS and to display it using a graph indicator. The output from the TPS varies between 0-10V and it is configured and rescaled to 0-90 degree using MAX. This information about the position of the throttle valve in degrees is used to determine the duration of pulse width of the signal that should be given to solenoid actuated fuel injector. 5.2. CRANK ANGLE MEASUREMENT The Crank position of the engine shaft is measured by the Crank angle sensor which is an inductive type proximity sensor. A 10V DC input is given to the input of the proximity sensor and the output is fed to the analog input channel (1) of the DAQ card (BNC 2120) which is connected to the 6024E card. The output signal produced, is used by the virtual instrumentation program to determine the exact position of the engine. When the piston covers the exhaust port of the engine before compression stroke the proximity sensor produces a 10 V trigger voltage and this trigger voltage is used to determine when the active pulse should be produced to actuate the injector and also this signal is used to find the RPM of the engine. 5.3. DETERMINING RELATIVE AIR CHARGE Sensors monitor all essential operating data to furnish instantaneous on current engine operating conditions. This information is transmitted to the BNC 2120 Card in the form of electrical signals, which are converted to digital form and processed for use in controlling the various final controlled elements. The system derives the data required for maintaining the required air-fuel mixture ratio by monitoring the intake-air charge for each cycle. Once this air mass (referred to as air charge) has been measured, it is possible to adapt the injected fuel quantity by varying injection duration. In this project, the air charge is determined indirectly, using co-ordinates defined by the throttle-valve angle (x) and engine speed (n). the driver controls the engine’s intake air stream with the accelerator pedal, this determines throttle opening and load factor. The throttle-valve angle(x) is registered by the throttle-valve potentiometer. Engine speed n and intake air density supplement the throttle-valve position(x) as additional variables for determining the intake air mass. CHAPTER 7 CONCLUSION The elimination of fuel waste and emissions have been intensively studied for the past few decades. One of the best methods for solving the above problem is identified as electronic fuel injection. In this work a successful virtual instrumentation program will be developed using LabVIEW software to run a two-stroke SI engine in injection mode. The VI program that will be developed can be used for stationary engines only where a computer is required to control the engine operation. After optimizing the program in LabVIEW software, this program can be fed into a micro-controller and used as an embedded system for real time applications. The injected engine shows an overall performance improvement compared to the basic engine. The injected engine shows very good improvements in brake power when compared to the base engine. The injected engine shows less fuel consumption. The brake thermal efficiency of the injected engine is higher when compared to the base engine. The CO and HC emissions are less in comparison with the base engine and the injected engine produced higher peak pressure. The present work can be extended by considering more input parameters, such as coolant temperature, and oxygen content in the exhaust, etc., for calculating the pulse width to inject the fuel in a most precise manner.