Notes on relativistic mechanics
advertisement

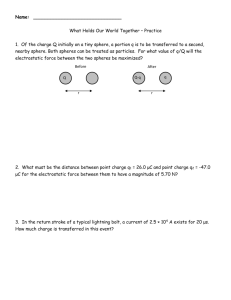
Relativistic particle mechanics Vectors in Minkowski space (sometimes called 4-vectors) have the same properties as vectors in any Rn : they can be added and subtracted and multiplied by scalars. As in Euclidean space, vectors can be moved parallel to themselves since there’s no curvature. This will change when we encounter gravity, but the spacetime of SR is flat. Notation: We will always, in SR, be using coordinates in some inertial frame, but we drop the subscripts for the specific observers unless they’re needed. The values of the coordinates themselves have no invariant meaning, but the difference in the coordinates of two events, usually denoted (∆t, ∆x, ∆y, ∆z) is a 4-vector, say U. In an inertial frame, the world-line of any (possibly non-inertial) observer can be given parametrically by u → X(u) for some parameter u. This is a timelike curve, so the world line is never tangent to the three-surfaces of constant time given by t = const, and that means we can always use the coordinate t to parametrize the curve. So dX/dt is tangent to the world line. But t has no invariant meaning, since it gets mixed up with the other components in another inertial frame: under a Lorentz transformation, we do not have dX ′ /dt′ = L(dX/dt). To get a 4-vector which well-defined, we use the proper time τ as a parameter. This is analogous to using arc length as a parameter in Euclidean space. Definition: The world velocity or 4-velocity of the observer whose world line is X(t) is dX dt dx dy dz . =V = , , , dτ dτ dτ dτ dτ Since dX/dτ = (dX/dt)(dt/dτ ), we have dX 1 V = =√ dτ 1 − v2 dx dy dz = α(v)(1, v). 1, , , dt dt dt All the components of V are frame-dependent. For instance if X(t) is the world line of an inertial observer, we can choose a frame in which (dX/dt)(t) coincides with the time axis, and in this frame, dX/dτ = V = (1, 0, 0, 0). In fact, we can always arrange this at any single event on a timelike curve, but dX/dτ is not constant unless curve belongs to an intertial observer. However, by construction, it’s a unit vector: V a Va = α2 (v)(1 − v 2 ) = 1. So, in any frame, the “tip” of dX/dτ lies on the sheet ∆τ = 1 of the hyperboloid t2A −xA •xA = 1. As expected, on the world line between the two events at which the observer’s clock reads τ = a and τ = b, Z bp Z b Z bs dX dX g dτ = V a Va dτ = dτ = b − a. , dτ dτ a a a 1 Definition: The 4-acceleration of the particle with world line X(t) is A= d2 X dV = . 2 dτ dτ Since V a Va = 1, differentiation with respect to τ gives V a Aa = 0; the 4-acceleration is orthogonal to the 4-velocity. Definition: For each particle, we define a scalar m0 called its rest mass, taken to be the same quantity as the Newtonian mass observed in slow-motion experiments. Definition: The 4-momentum P of a particle with rest mass m0 and 4-velocity V is P = m0 V = m0 α(v)(1, v) = (m, p), (1) where m, the relativistic mass and p, the relativistic momentum are defined by this expression: m0 m0 m= √ , p= √ v = mv. 1 − v2 1 − v2 This m( = mi ) is the inertial mass which appears on the right in f = ma in Newton’s second law, as opposed to the gravitational mass mg which appears as part of the expression for the gravitational force in Gmg M . |f|= r2 The experimental fact that mi = mg is called the weak principle of equivalence. If two particles with 4-momenta P1 and P2 collide, resulting in particles with 4-momenta P3 and P4 , then the total 4-momentum P = P1 + P2 must be conserved. One can argue this theoretically, based on Lorentz-invariance, but its validity comes from experiment: this is the conservation law used to analyze the data from particle accelerators, and it’s verified literally thousands of times a day. We have, in such a collision, P1 + P2 = P1′ + P2′ , which implies p1 + p2 = p′1 + p′2 , and m1 + m2 = m′1 + m′2 , (2) (3) where all the vectors are referred to the same frame. This is just an illustration; there could be a different number of particles before and after the collision.1 In the case of velocities v ≪ c, α(v) ≈ 1, and these expressions reduce to their Newtonian counterparts, as we should expect. 1 The actual computations can be fairly complicated. See Hagedorn, Relativistic kinematics. 2 From (1), reverting to standard units for the moment, we see that P a Pa = m20 c2 = m2 c2 − p2 =⇒ p2 = c2 (m2 − m20 ) (4) Moreover, if P , the total momentum, is conserved, its time component mc must be conserved according to (3). Definition: The total energy of a particle (system of particles) is the the quantity E = mc2 ; so the time component of the 4-momentum is E/c. It’s conserved in collisions. To see why this definition is plausible, for a single particle we have, using the binomial theorem, −1/2 v2 v2 m0 2 2 2 2 mc = m0 c 1 − 2 ≈ m0 c 1 + 2 = m0 c2 + v c 2c 2 to the lowest order in v 2 /c2 . We recognize the Newtonian kinetic energy in the second term, so the units are right, and the first term m0 c2 must also be an energy. It doesn’t vanish as v → 0; in fact, at non-relativistic speeds, it’s by far the largest contributor to the total energy. The neglected terms in the expression above all involve v 2 and are lumped in with the Newtonian one to give us Definition: The relativistic kinetic energy of a particle is T = c2 (m − m0 ). So E = mc2 = m0 c2 + T . The quantity m0 c2 is called the internal or rest energy of the particle. Note that E2 − p2 = m20 c2 , 2 c an expression which makes sense even for zero rest-mass particles (photons, some(?) neutrinos) for which m0 = 0. We know that these particles have momentum, and the proper relation is given by P ◦P = E = pc, where P = (E/c, p) is a null vector. If we have a system of particles, with 4-momenta Pi , subject to no forces except mutual P collisions, the total 4-momentum P̄ = Pi = (m̄, p̄) is timelike and future-pointing, so there exists an inertial frame Ō in which the spatial components of P̄ vanish. Ō should be called the center of momentum frame, but it’s usually called the center of mass (CM) frame. This is somewhat misleading, as the center of mass does not exist in the usual sense: Suppose two identical particles move with equal but opposite velocities along the x axis of the center of momentum frame. In the rest frame of either particle, the other particle is more massive, and thus the “center of mass” lies not at x = 0, but closer to the other particle. So the notion of center of mass is observer dependent.2 2 See, for example, Rindler, Essential relativity, p.106. 3 Definition: The 3-force is defined in terms of the relativistic 3-momentum: f= dp d = (mv), dt dt where m is the relativistic mass. Definition: The 4-force on a particle having 4-momentum P is d dm dP = α(v) (m, p) = α(v) ,f . F = dτ dt dt If the rest mass m0 remains constant throughout the motion of the particle, F = m0 dV = m0 A. dτ where A is the 4-acceleration. It therefore follows that V ◦ F = 0. Substituting into this the components for F and V , we get dm dm − f • v = 0 ( = c2 − f •v in conventional units). dt dt Since (classically) the work done by the force in this direction is dW = f •dx = f •vdt = c2 dm; this gives further support to the formulation E = mc2 . Actually, we can also derive the relativistic mass formula from the above: multiplying both sides of the DE by 2m, we get (conventional units) 2mc2 dp d dp2 dm = (m2 c2 ) = 2mv• = , so dt dt dt dt d(m2 c2 ) d(m2 v 2 ) = , and there’s a constant K such that dt dt m2 c2 = m2 v 2 + K We fix K by setting v = 0 and denoting m(0) by m0 : m2 c2 = m2 v 2 + m20 c2 . Now solving for m gives m0 . m(v) = p 1 − v 2 /c2 4 Expanding the derivative of the 3-momentum gives dp d(mv) dm f •v = = v + ma = 2 v + ma, dt dt dt c and the force is not, in general, parallel to the acceleration as it is in Newtonian particle mechanics. The exceptions are when the force is either orthogonal to or parallel to the velocity u. Billiards - Newtonian vs relativistic In ordinary billiards, it is well-known (in the absence of “English”) that if the cue ball strikes a stationary one, the paths of the two balls after collision make an angle of π/2. See the figure on the next page. u v+u u v v −u −v 2v −u v−u Figure 1: Newtonian billiards: the (identical) particles approach each other in the CM frame. Conservation of energy and momentum =⇒ ||u|| = ||v||. The figure on the right (frame of the table) is obtained by adding v to everything. (Why is the angle π/2?) In the relativistic case, the first picture is fine in the CM frame, but the second is not: in the frame of the table, the velocity of the particle on the right is 0, but the incident particle has a velocity of magnitude 2v/(1 + v 2 ) < 2v according to the addition formula. To work this out in detail, suppose that a particle in uniform, rectilinear motion in A’s frame has velocity u = (u1 , u2 , u3), while in B’s frame it has velocity u′ = (u′1 , u′2 , u′3 ). The relation between u and u′ is the relation between ∆x/∆t and ∆x′ /∆t′ computed from the standard boost (so ∆y = ∆y ′ , ∆z = ∆z ′ ). We find that u1 − v u′1 = 1 − vu1 u2 ′ u2 = α(v)(1 − vu1 ) u3 u′3 = . α(v)(1 − vu1 ) To do the billiard problem, suppose that the CM frame is the unprimed one, and that the two “incoming” particles have velocities u = (u, 0, 0) and −u along the common x axis; this 5 means that v = u in the equations above. We may assume that the collision plane is the xy plane, and that the outgoing particles have velocities w1 = (u cos θ, u sin θ, 0) and w2 = −w1 . So, in the primed frame (that of the billiard table), assuming the second particle to be at rest, we have −2u ′ u1 = , 0, 0 1 + u2 u′2 = (0, 0, 0), and w1′ w2′ −u sin θ −u(cos θ + 1) , ,0 = 1 + u2 cos θ α(u)(1 + u2 cos θ) u(cos θ − 1) u sin θ = , ,0 1 − u2 cos θ α(u)(1 − u2 cos θ) Computing the slopes ∆y ′ /∆x′ for both these particles, we get √ √ sin θ 1 − u2 sin θ 1 − u2 , tan θ2 = , tan θ1 = cos θ − 1 cos θ + 1 and therefore tan θ1 tan θ2 = 1 − u2 < 1. (5) If θ1 + θ2 were a right angle, then we should have tan θ2 = cot θ1 , with their product = 1. But the product is less than unity, meaning that the total angle between the two outgoing particles in the frame of the table is less than π/2. Notice that as u → 1(= c), the total angle goes to 0! Exercises 1. Particle 1, moving at .96c, collides obliquely with particle 2, which is at rest in the lab frame. The collision is perfectly elastic, and both particles have equal rest masses. What is the total angle θ1 + θ2 after collision? 6