3 Communications

PROJECT DELIVERABLE D7
Workstation Hardware /
Communications
Shared-cost RTD
Project acronym: TOURBOT
Project full title: Interactive Museum Tele-presence Through
Robotic Avatars
Contract Number: IST-1999-12643
Key Action: 3
3-2-3 Action Line:
Workstation
Hardware /
Communications
Project
Deliverable
TOURBOT: Interactive Museum Tele-presence Through Robotic Avatars
Project Deliverable D7: Workstation Hardware / Communications
Date Produced:
Authors:
March 16, 2001
Wolfram Burgard and Dirk Hähnel
Contents
1 Introduction .................................................................................................................. 3
2 Computing Architecture ............................................................................................... 4
2.1 Computing Facilities inside the Robot .................................................................. 5
2.2 External computing facilities ................................................................................. 6
2.2.1 Web-Server Workstation ................................................................................ 7
2.2.2 Computing Server ........................................................................................... 8
2.2.3 Visualization Computers ................................................................................. 9
2.3 Network Structure................................................................................................ 10
3 Communications......................................................................................................... 11
3.1 Digital Comunication Infrastructure .................................................................... 11
3.1.1 Tethered Connections ................................................................................... 11
3.1.2 Wireless Network.......................................................................................... 12
3.1.3 ISDN / DSL – Connections........................................................................... 13
3.2 Analog Communication System .......................................................................... 14
3.3 Video Streaming .................................................................................................. 14
4 Conclusions ................................................................................................................ 15
Page 2
Workstation
Hardware /
Communications
Project
Deliverable
1 Introduction
The current document constitutes the description of the workstation hardware and the communication part of the TOURBOT system. TOURBOT has commenced Jan. 1st,
2000 as a two-year RTD project funded by the Information Society Technologies (IST)
Programme of the European Union (EU).
The goal of TOURBOT is the development of an interactive tour-guide robot able to provide individual access to museums cultural heritage over the Internet. To be accessible to most people in Europe and the world, the TOURBOT system operates over the Web and allows users connected to the Internet to issue commands that direct the robot to move in its workspace and visit specific exhibits. The mobile platform is equipped with a camera system that is used to grab streams of images of the robot’s environment. The imaged scene of the museum and the exhibits is communicated over the Internet to the remote visitor. As a result the user enjoys a personalized tele-presence to the museum, being able to choose the exhibits to visit, as well as the preferred viewing conditions.
In order to allow users to interact with the TOURBOT platform, the system needs a multimedia Web interface. The task of this Web interface is to allow people all over the world to tele-control the robot and to specify target positions and viewpoints. This Web interface additionally contains a multimedia information base providing a variety of information about the exhibition at various levels of detail. Furthermore, the Web interface is used for broadcasting video information. Additionally to a Web-Server establishing the interaction between the remote user and the robot, the TOURBOT system requires off-board computing resources to monitor mobile platform and to perform heavy-duty computations. Both services are fulfilled by off-board workstations, which are connected to the Internet and to the mobile platform.
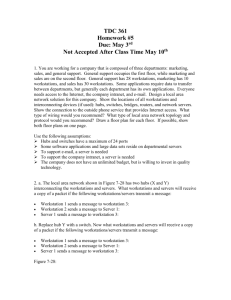
Figure 1 shows the major components of the TOURBOT system. On one hand, we have the mobile platform that operates autonomously in its workspace to fulfill the requests of the user. To quickly react to sensory input, e.g. cases where visitors block the path planned by the robot or other obstacles, the mobile platform is equipped with on-board computing devices. On the other hand, the TOURBOT system uses a cluster of workstations, the mobile platform communicates with over a wireless network, in order to receive commands issued by remote users or to deliver state information such as the position of the robot and images grabbed with the robot’s on-board cameras.
The goal of this document is the specification of the on-board and off-board workstations as well as the communication system. It will take into account the necessary computing
Page 3
Workstation
Hardware /
Communications
Project
Deliverable and communication requirements. In the first section, we will describe the necessary hardware for the on-board and off-board systems. The digital and analog communications used by the TOURBOT system are described in Section 3.
Figure 1: Hardware components of the TOURBOT-System.
2 Computing Architecture
The overall computing architecture mainly consists of two components which are (1) the on-board computers of the mobile platform and (2) the off-board computers required to perform heavy-duty computations and to establish the connection between the users and the robot.
Page 4
Workstation
Hardware /
Communications
Project
Deliverable
2.1
Computing Facilities inside the Robot
The mobile robot requires on-board computing power for various reactive processes designed to control the robot over its interfaces and to quickly process and react to sensory input. The standard equipment of a B21 robot used as a mobile platform in the context of this project consists of one or two personal computers with Intel Pentium III microprocessors. The TOURBOT system is configured with two workstations on the platform with the following requirements:
Pentium III class main-board with PCI and ISA slots
Intel Pentium III CPU (700 MHz)
256 Mbytes memory
10 MBit Ethernet network
RS 232 serial interfaces
XGA card
Soundcard
To enable the system to transfer video streams to the users, one of the two on-board computers is equipped with
2 x frame grabber cards (BT848 based)
Additionally, in order to establish the communication to the workstation, one on-board computer requires a
Wireless LAN interface
The network packages for the second computer will be forwarded by IP-masquerading.
The use of two platforms is essential, because of the following two reasons.
1.
One computer is used for realizing the various navigation tasks and for accessing the robots sensors and actors like the pan/tilt unit, soundcard, laser-range finders, ultrasound sensors etc. Since the whole system consists of several processes that are run in parallel, the underlying operating system must provide full multitasking. The standard operating system used on B21 robots is Linux, a variant of the Unix operating system. Since not all devices are supported by
Linux, it has to be ensured that the appropriate device drivers for Linux are available. This concerns the extensions cards such as the Ethernet, Wireless LAN,
RS232, Graphics and Sound cards. To establish the desired compatibility, the
Page 5
Workstation
Hardware /
Communications
Project
Deliverable
TOURBOT system is equipped with an NE2000 compatible network interface, a standard multi-port RS232 card and a SoundBlaster compatible sound card. The graphics card is also a typical SVGA-compatible card with a minimum of 2MB video RAM. Finally the Wireless Network is realized by a Lucent Technologies system or BreezeCom devices.
2.
The second computer is needed to realize the video broadcasting system. Through extensive experimentation, two different techniques which are most suited for the
TOURBOT system have been identified. The corresponding systems implementing these techniques are Webcam32 ( http://www.surveyor.com/ ) and the RealVideo ( http://www.realnetwork.com/ ). Whereas the Webcam32 server is only available for Windows, RealVideo provides servers for both Windows and
Unix. On one side RealVideo is using state-of-the-art compression technologies to reduce the used bandwidth; yet Webcam32 has the advantage of low communication delays and, therefore, is better suited for the exclusive control of the robot. This, however, requires, that the second on-board computer run under
Windows.
A further advantage of using two different operation systems inside the robot is that it provides the maximum flexibility and adaptability. Whenever new techniques are available for one of the two platforms, they can easily be added so that the whole system can always make use of the most recent techniques available.
In order to establish a communication between the on-board computers, the robot by default is equipped with a 10Mbit hub, which is sufficient for all necessary communications between the different processes running on board of the robot.
2.2
External computing facilities
To fulfill all required tasks, such as navigation and video broadcasting, a single external workstation is not sufficient. Instead, a small cluster of workstations that are connected via 100Mbit LAN is needed. Since all programs needed to realize the TOURBOT system are running under Linux or Windows, no special purpose computer hardware is required.
Rather, four standard Intel Pentium III based Workstations are sufficient. Since some of the navigation modules (e.g. the localization system) require serious computing resources, one of the workstation will be used for this purpose. A second workstation will run the other navigation tasks. The third workstation is used for visualization purposes and needed to monitor the state of the system. Finally the fourth workstation runs the
Web-Server and is responsible for user interaction.
Page 6
Workstation
Hardware /
Communications
Project
Deliverable
2.2.1
Web-Server Workstation
The Web-Server is needed to handle all requests from remote users and to deliver all requested information. To be able to serve even larger groups of users this system requires a high-end PC workstation with a sufficient amount of processing capacity, hard disk storage and memory. The Web-Server of the TOURBOT system includes
Pentium III class main-board with PCI and ISA slots
Intel Pentium III (1000 MHz) CPU
512 Mbytes or more memory
100Mbit Ethernet network
40Gbyte hard disk
SVGA video card (16 Mbytes or more)
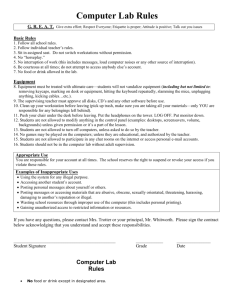
The Web-Server is the only workstation of the TOURBOT that requires a fast and permanent connection to the Internet. All other external workstations can be connected to this server via a slower Ethernet or ADSL connection (see Figure 2). If only ISDN connections between the museum site and the Web-Server are available, the Web server requires
2x - 4x ISDN cards.
By channel bundling one obtains a bandwidth of 128 to 256Kbyte/sec, which is sufficient to deliver the video streams between the robot and the Web-Server.
WORKSTATION
ADSL / ISDN CONNECTION
WEB-SERVER
PERMANENT CONNECTION
INTERNET
Figure 2: ADSL / ISDN link between the Web-Server and the off-board workstations.
Page 7
Workstation
Hardware /
Communications
Project
Deliverable
The amount of information to be delivered between the end user and the robot system itself is rather low. It mainly consists of steering commands and/or positions in the environment that can be transferred in packages with a size less than 1Kbyte.
Furthermore, since this information has to be transferred at a rate of approximately 1Hz, all these data can be transferred over the ISDN connection for the data transfer from the workstations to the Web-Server. Since the Web-Server is configured under Linux, all components of this machine are Linux-compatible.
The advantage of having a single machine that is connected to the outside world is that the other workstations only need to communicate with the Web-Server and the robot in order to update and transfer status information. This leads to a serious reduction of the communication load in the inner system consisting of all other workstations and the robot itself. For the sake of maintenance, the Web-Server also serves as a router between the
Internet and the other Workstations as well as the on-board computers. This allows a remote maintenance of all individual components of the TOURBOT system.
2.2.2
Computing Server
Additionally to the Web-Server, the TOURBOT system requires three workstations which perform heavy-duty computations and which provide visualizations necessary to monitor the actions of the platform. Whereas the computing server also needs to be a high-end workstation, the other two machines can be average PC workstations.
As pointed out above, some of the processes of the navigation system, such as the path planning system, the localization system and computer vision algorithms cause a high processing load and require a huge amount of memory. These processes will be run on a computing server that requires a similar configuration as the Web-Server:
Pentium III class main-board with PCI and ISA slots
Intel Pentium III (1000 MHz) CPU
512 Mbytes or more memory
100Mbit Ethernet network
40Gbyte hard disk
SVGA video card (16 Mbytes or more)
Since the navigation processes are developed under Linux, all components of this system are Linux compatible.
Page 8
Workstation
Hardware /
Communications
Project
Deliverable
2.2.3
Visualization Computers
The visualization computers are needed to display relevant state information of the
TOURBOT system and thus allow the stuff operating the robot to control the system.
This display will include visualization of the current position of the robot in its workspace, the currently planned path and the currently chosen trajectory. Furthermore it shows the sensory input of the robot as well as the input given by remote and on-site users. This way these machines present all relevant information on their screens. The hardware of these workstations should fulfill the following requirements:
Pentium III class main board with PCI and ISA slots
Intel Pentium III CPU (700 MHz)
256Mbyte or more memory
10/100Mbit Ethernet network
Since one of these computers is needed to establish the connection to the Web-Server, it has to be equipped with additional network adaptors:
Second network adapter o 10/100Mbit Ethernet network or o 2x-4x ISDN cards
Page 9
Workstation
Hardware /
Communications
STATION
WORKSTATION
WORKSTATION
WORKSTATION
WIRELESS CONNECTION
WORKSTATION
ROBOT
WORKSTATION (LINUX)
WORKSTATION (WIN98)
Project
Deliverable
WIRELESS CONNECTION
INTERNET CONNECTION
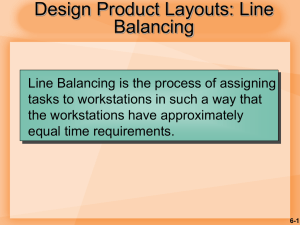
Figure 3: Network structure of the TOURBOT system.
2.3
Network Structure
Figure 3 illustrates the overall network structure of the TOURBOT system architecture.
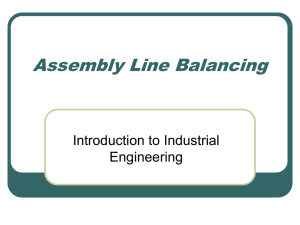
As pointed out above, the whole system includes two on-board computers and four offboard workstations. The on-board-computers are connected via a local Ethernet. The onboard network is connected to the off-board workstations via a wireless LAN. The offboard workstations form a cluster and are connected via a local area network. One of the computers runs the Web-Server and is directly connected to the Internet (see Figure 3). If there is no direct Internet connection available at the museum cite, the structure is slightly different. Because of the large possible number of simultaneous requests, the Web-Server needs to be connected directly to the Internet. Therefore, the off-board workstations have to be connected to the Web-Server via an ADSL ore a bundled ISDN connection (see
Figure 4). The Web-Server additionally realizes a router to establish connections between the Internet and the off-board and on-board computers. This way, the whole system can also be monitored and maintained remotely.
Page 10
Workstation
Hardware /
Communications
STATION
WORKSTATION
WORKSTATION
WORKSTATION
WIRELESS CONNECTION
ROBOT
WORKSTATION (LINUX)
WORKSTATION (WIN98)
Project
Deliverable
WIRELESS CONNECTION
ADSL / ISDN CONNECTION
WORKSTATION
INTERNET CONNECTION
Figure 4: Network structure with ADSL/ISDN connection the Web-Server.
3 Communications
3.1
Digital Comunication Infrastructure
The digital communication is necessary to communicate information between the onboard and off-board computers as well as to the remote users.
3.1.1
Tethered Connections
Apart from the possible ISDN-connection between the Web-Server and the off-board workstations as well as the wireless connection between the on-board computers and the off-board workstations, the digital communication is realized by TCP/IP connections
Page 11
Workstation
Hardware /
Communications
Project
Deliverable over a standard 10/100 MBit Ethernet network. This requires two hubs/switches. One hub has to be installed on the robot and realizes the connection between the two on-board computers and, depending on the type of wireless connection used, between the on-board computers and the wireless LAN. The off-board computers are also connected via a hub or a switch.
3.1.2
Wireless Network
A wireless LAN is used to realize the communication between the computers inside the robot and the external workstations (see Figure 5).
The Wireless LAN technology can roughly be divided into the following two categories:
Systems using frequency hopping (FH) technology
Systems using direct sequence (DS) technology
Both system use a frequency in the neighborhood of 2.4GHZ and have the permission to be used in Europe. Furthermore, there are IEEE standards for these technologies so that components of different providers can be used in the same setting. The advantages and disadvantages of the two different systems can be summarized as follows:
FH technology:
+ large range
+ reliable connection
- bandwidth 3Mbit/sec
- price
DS technology:
+ smaller price
+ 802.3b standard with 11Mbit/sec
- short range
Page 12
Workstation
Hardware /
Communications
Project
Deliverable
Figure 5: Wireless connection between the robot and the off-board workstations.
The choice of the system depends of the environment of the robot. Both systems are easy to install and extensive tests with both technologies have shown that both of them can be used for the TOURBOT project. A serious requirement fulfilled by both technologies is that they can cover large areas by using several stations. The system automatically chooses the next station so that no additional effort is necessary when several stations are used.
3.1.3
ISDN / DSL – Connections
If there is no direct Ethernet connection available at the museum site one needs to realize an ISDN or an ADSL connection between the off-board workstations and the Web-
Server. As pointed out above, the Web-Server needs to be connected directly to the internet in order to serve all possible requests of remote users. Standard ADSL provides uplink speeds of 128Kbits and 256Kbits, which - as pointed out above - is sufficient to transfer the image streams from the off-board workstations to the Web-Server. If no
ADSL-provider is available, the connection has to be realized via ISDN. In this case, however, one needs channel bundling to achieve the desired connection speed.
Linux and Windows, the operating systems used by the TOURBOT system, both support channel bundling. Under Linux, channel bundling is supported by the ISDN4LINUX package in two different variants:
Raw Bundling (by configuring slave channels)
Page 13
Workstation
Hardware /
Communications
Project
Deliverable
MPPP (based on syncPPP)
Since the ISDN-subsystems are run on the Web-Server as well as one of the off-board workstations, the appropriate number of channels can easily be established.
If an ISDN or ADSL-connection is used, one of the off-board workstations has to be operated as a router. For this purpose it needs a second Ethernet card communicating with the internal network. In case of an ADSL connection this server needs two Ethernet cards, one that is connected to the ADSL router and another one that is connected to the three off-board workstations at the museum site.
3.2
Analog Communication System
As specified above, the connection between the avatar and the remote workstations consists of a wireless LAN with a bandwidth between 3 and 11Mbits/sec. Since the video streams transferred between the avatar and the off-board computers pose significant bandwidth requirements, a dedicated video communication link may be considered. It should be stressed that this is not a prerequisite for the proper function of the system, but rather a “safe approach” solution with respect to bandwidth requirements. There are two technical alternatives to this issue. One way is to choose a second wireless connection between the robot and the workstations. The configuration of this connection is in analogy to the digital connection described above. As an alternative, the system can be equipped with an analog video link to transfer image streams from the platform to the off-board workstations. If the analog transfer is used, the frame grabber system, the robot is equipped with, has to be installed in one of the off-board workstations. The disadvantage of this solution is that the quality of the video signal is reduced.
Additionally we sometimes observed interferences between the digital and the analog communication link so that the use of a second wireless LAN connection should be preferred if the required bandwidth is small enough. If, however, the video stream has to be transferred at high rates, then the cheap and easy to install analog transmission has to be preferred.
3.3
Video Streaming
To establish the desired tele-presence for a remote user, the TOURBOT system provides a continuous video stream. In this context, streaming denotes the continuous refresh of images on the users browser. Currently, two different systems have been identified as
Page 14
Workstation
Hardware /
Communications
Project
Deliverable appropriate for the TOURBOT application. These are the Webcam32 and the RealVideo systems.
Both systems apply a client server technology. Whereas the server compresses the images and transfers them into the video stream, the client, also denoted as the viewer, receives this stream and displays it in the Web page of the TOURBOT system.
Webcam32 has a range of streaming technologies. Among them are the following two techniques:
Image pull
Server push, respectively JavaCamPush
If image pull is used, the user’s Web browser periodically requests new images and updates them immediately after their arrival. Unfortunately this approach leads to flickering animations on some browsers. When server push is used, the server sends updates directly to the browsers of the remote users. Whereas this technique leads to smooth updates, not all browsers support it. A solution to this problem is the
JavaCamPush Applet. This applet, which is automatically downloaded by the browser over the Internet, accepts server push streams from the Webcam32 server and displays these images without any flickering. The installation of the JavaCamPush applet is carried out dynamically so that no additional actions are required from the user. Once the browser has installed the client from Webcam32, the applet is executed and starts to receive the image stream from the server.
RealVideo operates in a similar fashion. The advantage of RealVideo is that it is available for a wide variety of platforms (MacOS, Windows, Linux). The disadvantage lies in the slightly higher delay of the received images.
To exploit the advantages of both approaches, the TOURBOT system is able to exploit both technologies. The corresponding streaming servers are configured to run on the
Web-Server. The broadcasting technology utilized by both systems avoids an overloading of the Web-Server.
4 Conclusions
The above paragraphs have outlined the overall structure and configuration of the
TOURBOT off-board workstations and communication system(s). It should be evident at
Page 15
Workstation
Hardware /
Communications
Project
Deliverable this point that, in order to realize the demanding features of the TOURBOT application, a number of standard hardware components have been employed and integrated with stateof-the-art techniques. The required constituents comprise proven and stable technologies, contributing thus to a robust and powerful system.
The off-board workstations and communication systems are based on powerful, yet standard PCs with appropriate expansion cards and communications equipment (hub, switch, ethernet cards). This results in moderate setup costs, even for the initial
(experimental) system. Future versions of the system are expected to be based on moderate workstations (a currently state-of-the-art PC becomes moderate in less than a year) and perhaps require fewer off-board PCs and communication parts due to continuous increases in processing power and delivered bandwidth. Evidently, the already of-the-self parts that constitute the relevant modules of the TOURBOT system are more and more becoming standard items, effectively decreasing the associated costs and contributing to opportunities for wider exploitation of the project results.
Page 16