EMSL - Penn State University
advertisement

Electro-Mechanical Systems Laboratory
19 Reber Building
Mechanical Engineering
Penn State University
University Park, PA-16802
Phone: (814)-863-4346
EMSL, PSU
Contents
1 People
1
2 High-speed fatigue testing apparatus
2
3 Surface Characterization
7
4 Multi-degree of freedom mechanical vibration apparatus
10
4.1 Hardware implementation and software structure . . . . . . . 12
5 Electric Motor set-up
5.1 Motor and Motor-Mount . . . . . . . . . . . . . . . .
5.2 Motor Controller . . . . . . . . . . . . . . . . . . . .
5.2.1 Controller . . . . . . . . . . . . . . . . . . . .
5.2.2 Interface . . . . . . . . . . . . . . . . . . . . .
5.3 Motor Drive . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 Drive . . . . . . . . . . . . . . . . . . . . . .
5.3.2 Current Sensor . . . . . . . . . . . . . . . . .
5.3.3 Isolator . . . . . . . . . . . . . . . . . . . . .
5.4 Details of the experiments performed . . . . . . . . .
5.4.1 Controller Block . . . . . . . . . . . . . . . .
5.4.2 Direct magnetic flux linkage estimation block
5.4.3 Operating Condition Block . . . . . . . . . .
5.4.4 Input and Output Block . . . . . . . . . . . .
5.5 Demagnetization Procedure . . . . . . . . . . . . . .
5.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . .
2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
14
14
15
16
17
17
17
19
20
20
20
21
22
22
23
24
EMSL, PSU
1
People
Name
Principal Investigator: Professor Asok Ray
Faculty Researcher: Professor Jeffrey Meyer
Faculty Researcher: Professor Pan Michaleris
Senior Research Personnel: Dr. Abhishek Srivastav
Senior Research Personnel: Dr. Shalabh Gupta
Senior Research Personnel: Dr. Eric E. Keller
Graduate Student: Dheeraj S. Singh
Graduate Student: Devesh K. Jha
1
Email
axr2@psu.edu
mayer.engr@psu.edu
pxm32@psu.edu
axs964@psu.edu
szg107@psu.edu
eekeller@psu.edu
dss240@psu.edu
devesh.dkj@gmail.com
EMSL, PSU
2
High-speed fatigue testing apparatus
This servo-hydraulic fatigue test apparatus is built upon a computer-controlled
MTS 831.10 Elastometer Test System. The following sub-systems are integrated for in-situ monitoring of test specimens under static or dynamic loads
using optical, ultrasonic and acoustic emission sensing modalities.
Figure 1: High-speed fatigue testing apparatus
Hardware
B Fatigue test equipment is a MTS 831.10 Elastometer Test System
that can work at a loading frequency ranging from 0.1 to 200 Hz; the
static load ratings of the test-set are ± 15kN and ±50mm
B Long Distance Traveling Optical Microscope consists of an Olympus
microscope mounted on a 3-axis precision stage and is fitted with a digital camera from DALSA. Together with the camera, the microscope
can resolve images on the order of 1 micron per pixel at a distance of
≈ 22 mm.
2
EMSL, PSU
Figure 2: Ultrasonic Flaw Detection
B 3-axis linear motion stages consists of three stepper motor-driven
precision stages that that have resolution of 1 µm in each axis. This
is used to control the location and focus of the microscope.
B Ultrasonic Flaw Detector is a piezo-electric transducer that injects
waves into the specimen and is spatially installed across the crack plane
to measure the signal. The signal energy is attenuated as a function
of damage.
The signal from one of the ultrasonic transducers consists of a spike
pulse that is modulated into a band-limited signal with frequencies,
ranging from 2 to 4 MHz. Alternatively, another transducer may use
a gated 5 MHz sine wave signal. Both transducers emit a signal for a
very short portion of the measurement cycle. The ultrasonic measurement data is collected asynchronously from the test specimens under
cyclic loading. Upon crack formation, ultrasonic data may be collected when the crack is fully open and thus the attenuation is at its
maximum. Generally, this phenomenon does not significantly affect
the observations until the crack length is large enough to almost fully
attenuate the ultrasonic signal. In addition to ductile alloys, the apparatus has the capability to test matrix composites for investigation
of material behavior changes over a prolonged period of time due to
fatigue damage.
B Acoustic Emission (AE) occurs when transient elastic waves are produced by a sudden redistribution of stress in a material. An external
stimulus such as change in pressure, load, or temperature can trigger
localized sources to release of energy. This energy propagate through
the material in the form of stress waves and can be picked up using
relevant sensors. Sources of AE can be various such as - initiation and
growth of cracks, slip and dislocation movements in metallic materials.
3
EMSL, PSU
Composites, on the other hand, produce AE via phenomenon such as
matrix cracking, fiber breakage and de-bonding.
Current set-up has acoustic emission sensors from Physical Acoustic
Corporation model R15. These sensors can pick-up elastic waves plane waves (angle of incidence normal to the face of the sensor) and
surface waves (angle of incidence transverse or parallel to sensor face)
with peak sensitivity 63 V/(µbar) and 69 V/(m/s) respectively. The
operational frequency range of the sensor is 50 - 200 kHz. Received
waveforms can be analyzed to get parameters such as rise time, amplitude and energy. Localization of the AE source can be done using the
time of arrival and multiple sensors. Also, isolation of spurious noise such as chatter from the clamping bolts, can be done by filtering based
on time of arrival to localize the region of interest.
Software
Data acquisition and communication is achieved by dedicated software to
control and monitor each of the subsystems. The following software have
been written and integrated for this purpose
B Station Manager for MTS Elastomer This software was provided by
the MTS corporation and is being used to control the Elastomer for
load and frequency settings for an experiment. It has the capability of
producing load cycles in a number of waveform shapes such as sinusoidal and square. It allows to run both force mode and displacement
mode experiments when the control variable is force and displacement
respectively.
B Fatigue Data Monitor This software poles into the controller for the
MTS elastomer system to gather fatigue data such as load, load cycles, displacement, etc. It then post the acquired information over a
TCP/IP network for other programs to download and process.
B Stage Motion Controller This software has been written to control
the motion of the three linear stages forming the triaxial motion setup. The three axes are Focus Axis, Horizontal Axis and the Vertical
Axis. Each axis can be controlled separately with an accuracy of 1
micron. The software stores the current location of all the axes which
is used to measure the length of the crack and monitor its evolution
with load cycles. Crack lengths and stage positions are clubbed into
a data packet and posted over a TCP/IP network for other client
programs.
4
EMSL, PSU
B Video Server This program controls the camera to get a running video
or still images of the specimen at specified times. This is a server
application and can be hooked up from remote machines to view and
save images of the specimen.
B Video Client This is a client program which talks to the Video Server
to acquire video streams and still images over the network. More than
one clients can be connected to the Video server from remote machines
to observe and save image data.
B The HUB This software, as the name suggests, is used to link different
software posting data over the TCP/IP network so that the data can
be synchronized and stored at a desired location. This program talks
to the Stage Motion Controller for microscope positions, the Station
Manager for the load, displacement and load cycle values. These values
as used to stamp the images, captured by the Video Server and Client,
for load cycles and crack length values. It also sends this information
Figure 3: Software communication diagram
5
EMSL, PSU
to the Ultrasonic Scope to store cycle and load information with the
stored waveforms.
B Scope This software is used to display the data received from the ultrasonic transducers and store it at a given location. A data window
can be selected by the user to specify the data range of interest. Waveforms are stamped with load and cycle information received form the
HUB. Using this software, data can be directly converted into MATLAB usable form for further processing.
6
EMSL, PSU
3
Surface Characterization
Zygo interferometer, Fig. 5 is a surface characterization equipment which
uses light beam splitting and interference between reference beam and the
one reflected form the test surface to profile the peaks and valleys. Measurements are non contact and non destructive and can be performed in ambient
light conditions.
A three-dimensional profile of the specimen surface is generated by a
NewView 5000 surface interferometer apparatus that measures the surface
heights of the scanned area ranging from 1nm to 5000µm with a resolution
of 0.1nm at the vertical scan speeds up to 10µms−1 It can scan areas up
to 50 mm× 50mm using its unique image stitching capabilities. This interferometer uses a non-contact scanning method using light interferometry
to acquire ultrahigh resolution images. It uses a closed-loop piezoelectric
scanner employing low-noise capacitive sensors to ensure accurate and repeatable linear motion over the full range of a scanned area. The surface
interferometer is equipped with the software MetroPro that is used to operate the interferometer and to store the surface profile data in a convenient
format for further data processing.
Currently this set-up is being used to characterize the damage site in
a specimen progressively loaded to higher number of cycles under fatigue
load. The goal is detect early signatures of damage - manifesting as surface
deformations before a surface crack becomes observable through the optical
microscope.
A typical results of surface characterization experiments of fatigue damage site is shown in Fig 6.
7
EMSL, PSU
Figure 4: Interferometer for surface characterization
Figure 5: Working Principle of the interferometer
8
EMSL, PSU
NoLoad
67.5k cycles
68.5k cycles
69k cycles
Figure 6: Surface profiled: Notch side; Scan size 0.70 × 0.75mm; Specimen:
CompactSp15
9
EMSL, PSU
4
Multi-degree of freedom mechanical vibration
apparatus
This experimental apparatus has been designed and fabricated specifically
to study the characteristics of complex mechanical vibration systems that
have the capacity of multiple degrees of freedom for motion along different coordinate directions. This special purpose experimental apparatus is
shown in Figure 7. The experimental apparatus can be used to replicate the
vibration response of a mechanical structure such as a support beam under
external excitation (e.g. seismic). The apparatus has three principle degrees
of freedom that arise from three actuators that provide the capability of motion along three different directions. Each of the actuator is excited using
a remote computer through an electro-hydraulic position feedback control
and is capable of providing a force up to 3,400 kgf. The actuators can be
excited over a wide band of frequency range and can produce oscillations of
significant magnitude.
Figure 7: Multi-degree of freedom mechanical vibration apparatus
The experimental apparatus consists of a rectangular base that is bolted
to the ground and supports two beams - horizontal (Bh ) and vertical (Bv ),
and three actuators - bottom (Ay ), back (Az ) and horizontal (Ax ). Figure 8
gives a two-dimensional schematic of the apparatus. The base of the vertical
beam Bv is connected to the bottom actuator Ay that moves the vertical
beam in the yz-plane about the hinge hy . The back actuator Az is mounted
on the vertical beam and moves the horizontal beam Bh , pivoted at hz , in
10
EMSL, PSU
Test Beam
Horizontal
Actuator
(Ax)
hz
hx
P
(a)
hz
(Az)
(Bh)
Horizontal
Beam
hx
P
z
(Bv)
Vertical
Actuator
hy
Test Beam
y
x
Vertical
Beam
(Ay) Bottom
Actuator
(b)
Figure 8: 2-D schematic of the Multi-degree of freedom apparatus (a) Top
View (b) Side View
the yz-plane. The horizontal actuator Ax rotates the test beam about the
pivot point hx in the xy-plane. Thus, the angular motion of the beams Bv
and Bh about the hinges hx , hy and hz are controlled by the linear motions
of the three actuators Ax , Ay and Az . For small angular displacements of
the beams, their angular motions translate into the movement of the point
P in three axes - x, y and z. The test beam is mounted at point P and it
can be given a desired base excitation in all or any direction of motion. The
structure of beams is made from 6mm thick hollow square steel sections.
The multi-degree of freedom mechanical vibration apparatus in Figure 7
is logically partitioned into two subsystems as described below.
a) The plant subsystem consists of the mechanical structure including
flexible hinges that connect the beams, the hydraulic system, and the
actuators and
b) The control and instrumentation subsystem consists of control computers, data acquisition and processing system, communications hardware
and software, and the sensors. The sensors include: i) linear variable
differential transformers (LV DT ) for displacement measurement and
b) integrated circuit-piezoelectric shear accelerometers that are used
11
EMSL, PSU
ym
z
Abase
yref
m
Atip
y
x
Figure 9: Schematic of the test beam structure
to measure the vibrations of the tip and the base of the horizontal
beam (see Figure 9). The sensitivity of sensor is 2.727 mV/ms−2 . The
control system and data acquisition software is executed under DSpace
platform on the windows operating system. The feedback control system shown in Figure 10 is installed on a Pentium pc along with necessary A/D and D/A interface to the feedback amplifiers connected to
the sensors and actuators of the test apparatus.
Figure 10: Control circuit for the mechanical vibration apparatus
4.1
Hardware implementation and software structure
The multi-degree of freedom mechanical vibration apparatus (Figure 7) is
interfaced with a DSpace Data Acquisition Board having 16 A/D channels
and 8 D/A channels. Data acquisition is carried out with a sampling rate at 1
KHz for monitoring and control. The time series data for statistical pattern
recognition can be decimated as required. The real-time instrumentation
and control subsystem of this test apparatus is implemented on a Pentium
PC platform. The software runs on the Windows XP Operating System
and is provided with A/D and D/A interfaces to the amplifiers serving the
sensors and actuators through the Control desk front end. The Control
desk front end loads a Simulink (Matlab based) module on to the data
12
EMSL, PSU
acquisition card to perform real-time communication tasks, in addition to
data acquisition and built-in tests (e.g., software limit checks and saturation
checks).
13
EMSL, PSU
5
Electric Motor set-up
The Permanent Magnet Synchronous Motor (P M SM ) test-bed developed
for validation and proof-of-concept of the fault detection by symbolic identification technique has been carried out in several parallel stages, all of which
have been finally integrated and tested. The following sections describe the
various parts of the P M SM test-bed.
5.1
Motor and Motor-Mount
The properties of the P M SM used in the experimental setup are listed
below:
B General Parameters
−
−
−
−
Cont. Stall Torque Lb-In (N-m): 3.90 (0.45)
Cont. Stall Current: 1.49
Peak Torque Lb-In (N-m): 15.93 (1.8)
Peak Current: 5 Amp
B Electrical Parameters
−
−
−
−
Torque Constant Lb-In/Amp (N-m/Amp): 3.10 (0.35)
Voltage Constant Vpk/KRPM (VRMS/KRPM): 30.4 (21.48)
Resistance: 11.95
Inductance (mHy): 16.5
B Mechanical Parameters
−
−
−
−
Inertia Lb-In-s2 (Kg-cm2): 6e-005 (0.06774)
Speed at 160 Bus Volts (RPM): 4000
Max Speed (RPM): 10000
No. of Motor Poles: 4
B Feedback Device
− Encoder Line Count 2500ppr
Figure 11 also shows the aluminum motor mount which has been designed and manufactured with adjustable sliding support for easy alignment
of the motor with the dynamometer bearing.
14
EMSL, PSU
5.2
Motor Controller
The motor controller has been developed in the Matlab/Simulink environment, and interfaced with the hardware through a DSpace card. The features of the DSpace card are listed below:
B Advanced Control Education Kit 1103 consisting of
B DS1103 PowerPC GX / 1GHz controller board,
B 32 MB application SDRAM,
B 96 MB communication SDRAM,
B PX4 expansion box with high speed serial host interface consisting
of DS814, PC-side PCI bus DS817 and opto-cable, CLP1103 Connector/LED Panel, CDP Control Development Software Package and
Microtec C Cross Compiler with USB dongle
Figure 11: The P M SM and its mount
15
EMSL, PSU
Figure 12: Speed controller implemented in Matlab/Simulink environment
5.2.1
Controller
The speed controller developed is displayed in Fig. 12. The purpose of developing the speed controller is to ensure that the demagnetization experiments
are carried out at a uniform speed of operation thus ensuring uniformity in
testing conditions. The controller employed is a simple PI controller involving two feed-back loops. The encoder interface block reads the motor
position and speed, which are respectively used in the reference frame transformations and a feed-forward term. The current measurement block reads
the line currents which are measured by the Hall Effect sensors. A separate
board has been designed and fabricated for accommodating the Hall Effect
sensors, which has been described later. The speed controller is built on top
of a torque controller by adding an outer loop with a separate proportionalintegral control. The rotational speed read-out from the encoder interface
is compared with the commanded speed and passed through the PI control
to generate quadrature axis current command, which is proportional to the
torque. The current readings are then compared with the desired values of
the currents which are dictated by torque requirements in the PI control
block. The command voltage thus obtained is reference frame transformed
and the corresponding duty cycles are generated in the Duty Cycle Generator block. The rest of the blocks are mainly related to over-voltage and
16
EMSL, PSU
over-current shutdown of the motor.
5.2.2
Interface
Figure 13: ControlDesk interface for graphical displays and commands
The ’ControlDesk’ has been used to create a user-friendly interface for
commanding the permanent magnet synchronous motor, for real time monitoring of the control signals, as well as data capture. A screen shot of the
ControlDesk interface that has been developed, has been shown in Fig. 13.
The graphical displays show the direct and quadrature axis current and voltages, as well as the rotor speed and orientation. The bus voltage is displayed
as a safety flag.
5.3
Motor Drive
The motor drive circuit for investigating failure in P M SM s has been designed using the Integrated Power Module for Appliance Motor Drive: IRAMS10UP60A.
The electronic drive may be logically divided into three sub-circuits, which
are explained in the following sections. A schematic of the electronic drive,
constructed in Eagle, is shown in Fig. ??.
5.3.1
Drive
The 600V IRAMS module contains six IGBT die each with its own discrete
gate resistor, six commutation diode die, one three phase monolithic, level
17
EMSL, PSU
shifting driver chip, three bootstrap diodes with current limiting resistor
and an NTC thermistor/ resistor pair for over temperature trip. The over
current trip circuit responds to an input voltage generated from an external
sense element such as a current transformer or sense resistor.
The micro controller provides all of the logic level PWM signal inputs
to the IRAMS module as well as processing current and temperature analog
signals fed back from the module. The detailed motor drive circuit using
the IRAMS10UP60A modules is illustrated in Fig. ??No high-side floating
power supplies are required because the bootstrap capacitors provide power
for the three independent high side driver channels.
Motor current is monitored by external Hall effect sensors in each phase
leg of the IGBT inverter. Under normal operating conditions, IGBT temperature is continuously monitored by the internal NTC thermistor feeding
a temperature dependent voltage to the micro processor. This voltage also
feeds the internal shut down function of the driver which terminates all 6
1
2
3
4
5
!
6
7
8
6
:
;
;
<
=
3
9
!
"
#
$
%
&
'
(
>
+
/
/
.
?
@
)
*
+
,
-
.
/
0
A
/
D
E
B
?
0
C
+
)
.
/
E
E
F
G
G
H
I
J
J
K
L
M
N
O
P
Figure 14: Several components of the P M SM drive and their interconnections
18
EMSL, PSU
Figure 15: The full setup with two drives, dynamometer and computer
drive signals when activated. In the event of an over current caused by a
stalled motor or other fault condition, the active low signal from the micro
controller turns off the external N-channel MOSFET and over rides the temperature signal causing instant shut down. After shutdown the 1.5W/6.8nF
network provides a reset function to re-establish IGBT gate drive following
a 9mS delay. The micro processor can be programmed provide permanent
termination of its outputs following a predetermined number of resets.
5.3.2
Current Sensor
The current sensors used in the setup and shown in Fig. 14 are closed loop
(compensated) Hall Effect current transducers LA 55-P procured from LEM.
The gains are controlled by using a LM124 chip consists of four independent,
high gain, internally frequency compensated operational amplifiers which
were designed specifically to operate from a single power supply over a wide
range of voltages. The OP Amp gains are adjusted by resistors.
19
EMSL, PSU
5.3.3
Isolator
The DSpace controller voard has been electrically isolated from the high
voltage side of the drive by using six high speed Photodiode Darlington optocouplers, shown in Fig. 14. The 5 volt input to the opto-coupler is provided
by a 3-Terminal 1A Positive Voltage Regulator LM 7805. The LM 7805 series
of three terminal positive regulators are available in the T O −220/D −P AK
package and with several fixed output voltages, making them useful in a wide
range of applications.
5.4
Details of the experiments performed
The purpose of the experiment is to validate advanced F DI algorithms for
prognosis and diagnosis of demagnetization failure in permanent magnet
synchronous motors. The needs of the experiment necessitates a highly
specialized P M SM apparatus with
1. A controller that enables it to run at a specified speed under varying
load torque conditions
2. A method for imposing various load torques on the motor
3. Instrumentation for data collection and storage
4. A method for direct estimation of the level of demagnetization
5. A method for accelerated demagnetization of the motor
The schematic of the entire experimental setup has been shown in Figure 16.
The whole figure is divided into several blocks for convenience, each of which
will be described next.
5.4.1
Controller Block
The P M SM used in the experiment is a three-phase four-pole device rated
at 160 V bus voltage, 4000 rpm and is fed by a pulse-width-modulated
(PWM ) inverter. The stator resistance of the motor is Rs = 11.95 Ω; the
quadrature-axis and direct-axis inductances are: Lq = Ld = 16.5 × 10−3 H;
and the rotor inertia is J = 0.06774 kg cm2 .
Two P I controllers in two loops have been employed for controlling the
power circuit that drives the P M SM . The inner loop regulates the motor’s
stator currents, while the outer loop regulates the motor’s speed. In this
20
EMSL, PSU
z
{
|
c
d
c
i
c
j
Q
}
W
b
Z
[
W
^
e
f
g
h
e
f
g
h
R
[
c
l
m
n
m
n
o
o
s
e
e
f
g
f
g
t
h
h
S
e
f
g
u
h
c
m
n
o
k
v
Y
\
p
X
q
w
x
r
y
b
^
[
Z
^
[
s
S
¡
¢
£
¤
¢
U
£
¥
¦
¤
¢
£
R
T
u
S
T
Q
R
~
V
W
X
Y
Z
W
[
\
]
^
_
[
W
³
§
¨
v
Y
x
©
c
ª
«
c
a
b
c
`
W
[
\
]
^
^
¬
c
·
©
­
©
´
s
µ
´
s
t
´
s
ª
c
¶
¸
®
¯
l
°
l
¦
±
¹
º
º
¢
²
l
»
¦
¼
½
±
¾
¿
c
©
c
¸
À
Á
Â
Ã
¬
Ä
Å
Æ
Ç
È
É
Figure 16: Inverter-driven permanent magnet synchronous motor (PMSM )
system
control scheme, the error in the measured and the commanded speed generates the command quadrature axis current, which is directly proportional
to the electromagnetic torque if the direct axis current is maintained to be
0. The line currents ia , ib and ic are then measured. The reference values
are compared with the actual values of the currents, and the error signal,
thus constructed is used for generating the gate turn on/off commands.
5.4.2
Direct magnetic flux linkage estimation block
As the permanent magnet inside the P M SM slowly deteriorates, it is imperative to be able to measure the extent of demagnetization by some kind
of direct technique, at each stage of demagnetization, so that the degree of
anomaly predicted by SDF can be mapped to this physical quantity. Several
researches have dealt with the estimation of the flux of a P M SM . It is of
no doubt that the no-load test method has become the most popular one. In
21
EMSL, PSU
this method, an auxiliary motor is required to drive the P M SM at constant
speed. The windings of P M SM are at open-circuit so that the flux can be
estimated by the EMF of the P M SM . The two phase stator voltage in the
rotor reference frame is given by
v̄ r = Rīr + L
Here
d r
ī + ωre J Līr + λ̄rP M
dt
"
(1)
#
0 −1
J=
1 0
is the 90o rotation matrix. Under steady state conditions, the derivative of
the current vector is dropped, and the voltage expression becomes:
V̄ r = RI¯r + Ωre J LI¯r + Λ̄rP M
(2)
where Ωre is the steady state electrical rotor velocity. In open circuit there
are no currents flowing in the windings of the machine, so the voltage is
entirely due to the permanent magnet flux linkage, hence
kV̄ k = kJΩre Λ̄rP M k =
P
Ωr ΛP M
2
(3)
The permanent magnet flux linkage is therefore
ΛP M
kV̄ k
= P
=
2 Ωr
q
2
3 Vl−l RM S
P 2π rpm
2
60
(4)
At each stage of demagnetization, the line-to-line voltage and the motor
speed in rpm is recorded. The permanent magnet flux linkage is estimated
from these following Eqn. 4.
5.4.3
Operating Condition Block
The desired rpm and the load torque is set in the operating condition block.
The load torque is directly set by the dyne.
5.4.4
Input and Output Block
All the variables are captured and stored in the output block, while the
input voltage commands are also saved in the input block.
It may be noted, that blocks 5.4.1 and 5.4.2 are never engaged simultaneously, because that would result in a fight between the external back-driving
motor and the P M SM controller.
22
EMSL, PSU
Ù
Ë
Ê
Ë
Ì
Î
Ú
Û
Ð
Ê
Ñ
Ò
Ó
Ò
Ô
Õ
Ô
Ò
×
Ø
Ö
Î
Ï
Ë
Í
Ê
Ð
Ó
Ó
Ò
Ô
Õ
Ô
Ò
Ö
Ê
Ì
Figure 17: Scheme for demagnetization of the PMSM
5.5
Demagnetization Procedure
The electromagnetic torque is proportional to the cross-product between
the current vector and the permanent magnet flux linkage vector. For a
given current magnitude, torque is therefore maximized if the direction of
the field generated by the stator windings is perpendicular to the direction
of the field generated by the permanent magnets. The resulting torque
attempts to align these fields. The P W M controller attempts to generate
the line current in the three phases in such a way, that this orthogonality is
maintained. Figure 17 illustrates these concepts.
It may be noted that orientation feedback is vital to this scheme, since
3-phase to 2-phase conversion is dependent upon correct estimation of the
rotor angle. In the present experiment, during demagnetization, just enough
offset is added to the encoder orientation so that instead of being orthogonal,
the stator winding field directly opposes the field generated by the permanent magnets. Thus, since the two fields are aligned, no torque is generated,
instead the permanent magnets slowly lose their magnetism. The considerable amount of heat generated in the process enhances the loss of magnetic
property in the permanent magnets.
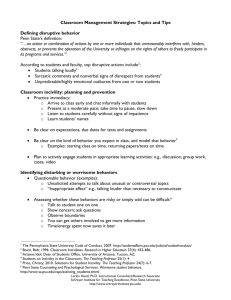
The temperatures which mark the end of each individual demagnetization run and the corresponding reduction in the magnetic flux linkage
measured by the no-load test method (section 5.4.2) are listed in Fig. 18
23
EMSL, PSU
% Reduction in Magnetic Flux
2.5
2.2743
2
1.8946
1.5
1.3498
1
0.5
0
80
0.8708
0.3879
100
120
140
Temperature
160 170
Figure 18: Variation of Magnetic Flux Linkage with Temperature
5.6
Conclusion
The P M SM experimental setup developed in the Electro-Mechanical Systems Laboratory provides a unique test-bed for performing accelerated demagnetization experiments on permanent magnet motors in a controlled
environment and validate advanced algorithms for failure prognosis and diagnosis.
24