Event-Triggering of Large-Scale Systems without Zeno
advertisement

Event-Triggering of Large-Scale Systems
without Zeno Behavior
Claudio De Persis, Rudolf Sailer, Fabian Wirth
University of Würzburg
09.07.2012
Outline
1
Motivation
2
Preliminaries (Standing Assumptions and Introduction to Small-Gain
Conditions)
3
Practical Stabilization
4
Numerical Example
5
Outlook and Summary
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
2 / 26
Outline
1
Motivation
2
Preliminaries (Standing Assumptions and Introduction to Small-Gain
Conditions)
3
Practical Stabilization
4
Numerical Example
5
Outlook and Summary
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
3 / 26
Motivation
Stabilization of a large-scale system over digital channels
Every subsystem communicates over a digital channel.
Communication is a limited resource.
Aim: reduce the amount of communication.
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
4 / 26
Motivation
Approach
Lower the amount of superfluous data transmissions
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
4 / 26
State
Periodic Sampling
Fabian Wirth (University of Würzburg)
t
MTNS12
09.07.2012
5 / 26
State
Event-Based Sampling (δ-Sampling)
Fabian Wirth (University of Würzburg)
t
MTNS12
09.07.2012
6 / 26
Drawback of Event-Triggering: Zeno Solutions
Zeno
Event-triggering may lead to
Zeno solutions
Example: Bouncing ball (with
damping)
Infinite number of discrete
events in finite time
How can we deal with the Zeno
phenomenon?
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
7 / 26
Outline
1
Motivation
2
Preliminaries (Standing Assumptions and Introduction to Small-Gain
Conditions)
3
Practical Stabilization
4
Numerical Example
5
Outlook and Summary
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
8 / 26
Systems under Consideration:
x state, x̂ information available to the controller Single system
ẋi = fi (x, ui )
x̂˙ = 0
ui = ki (x + e)
e = x̂ − x
xi , ei ∈ Rni
x = (x1T , . . . , xnT )T
i = 1, . . . , n
e = (e1T , . . . , enT )T
Overall system
f1 (x, k1 (x + e))
..
ẋ = f (x, k(x + e)) = f (x, k(x̂)) =
.
fn (x, kn (x + e))
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
9 / 26
Event-Triggering
Given continuous triggering functions Ti , i = 1, . . . , n, the condition
Ti (xi , ei ) ≥ 0
implicitly defines event times (triggering times) tk by
t1 := inf{t > 0 : ∃i s.t. Ti (xi (t), ei (t)) ≥ 0}
tk+1 := inf{t > tk : ∃i s.t. Ti (xi (t), ei (t)) ≥ 0}
The system i for which Ti ≥ 0 holds, transmits its state to all controllers kj
at tk . Hence the ith error will be set to zero.
Ti (xi , ei ) ≥ 0 ⇒ ei (tk+ ) = 0
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
10 / 26
Standing Assumption 1
For each subsystem there exists a proper, smooth function Vi : Rni → R+
and γij , ηij ∈ K∞ ∪ {0}, αi positive definite, ci > 0 such that
Assumption 1 (ISpS-Lyapunov Function)
Vi (xi ) ≥ max{γij (Vj (xj )), ηij (||ej ||), ci } ⇒ ∇Vi (xi )fi (x, ki (x + e)) ≤ −αi (||xi ||).
j
K∞ functions are
ΓHsL
continuous
zero at zero
strictly increasing
unbounded
Fabian Wirth (University of Würzburg)
s
MTNS12
09.07.2012
11 / 26
Some Remarks on the Gains γ, η
ISpS-Lyapunov function
Vi (xi ) ≥ max{γij (Vj (xj )), ηij (||ej ||), ci } ⇒ ∇Vi (xi )fi (x, ki (x + e)) ≤ −αi (||xi ||)
j
γi1
γ1i
Σ1
η11
ηi1
η1i
γ1i
γi1
k1
Fabian Wirth (University of Würzburg)
γni
γin
Σi
ηii
ki
MTNS12
Σn
ηni
ηin
γin
γni
ηnn
kn
09.07.2012
12 / 26
Standing Assumption 2
Define
max{γ11 (σ1 (r )), . . . , γ1n (σn (r )), ϕ11 (r ), . . . , ϕ1n (r )}
..
Γ(σ(r ), ϕ(r )) :=
.
max{γn1 (σ1 (r )), . . . , γnn (σn (r )), ϕn1 (r ), . . . , ϕnn (r )}
Assumption 2: A small-gain condition holds
n and ϕ ∈ Kn×n such that
There exists σ ∈ K∞
∞
Γ(σ(r ), ϕ(r )) < σ(r ) ,
Fabian Wirth (University of Würzburg)
MTNS12
∀r > 0 .
09.07.2012
13 / 26
Outline
1
Motivation
2
Preliminaries (Standing Assumptions and Introduction to Small-Gain
Conditions)
3
Practical Stabilization
4
Numerical Example
5
Outlook and Summary
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
14 / 26
Existence of a Lyapunov Function for the Overall System
Theorem 1
Let there be an ISpS-Lyapunov function Vi for each subsystem. Let the
small gain condition hold. Define
V (x) = max σi−1 (Vi (xi )) ,
i
η̂j = max ϕ−1
ij ◦ ηij .
i
Then there exits a positive definite α : R+ → R+ such that if
max{σi−1 (Vi (xi )), ci } ≥ η̂i (kei k) ∀i ,
then
V (x) ≥ ĉ ⇒ hp, f (x, k(x + e))i ≤ −α(||x||), ∀p ∈ ∂V (x) ,
with ĉ = maxi {ci , σi−1 (ci )}.
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
15 / 26
Intuition
Recall
max{σi−1 (Vi (xi )), ci } ≥ η̂i (kei k) ,
η̂j = max ϕ−1
ij ◦ ηij .
i
Intuition
The small-gain condition ensures that the interconnected system is stable if
e ≡ 0.
Scaling σi comes from the small-gain condition
ηij describes the effect of ej to system i. ϕij is a damping of ηij such that
the small gain condition holds despite e.
Overall: If the error is small compared to the state, it cannot destroy
stability.
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
16 / 26
What Does the Triggering Condition Look Like?
Corollary 1
Consider again
ẋ = f (x, k(x̂)) .
Define the triggering condition of the ith subsystem as
Ti (xi , ei ) = η̂i (kei k) − max{σi−1 (Vi (xi )), ci } ≥ 0 ,
then the equilibrium is practically asymptotically stable.
Important:
The triggering condition only uses local information.
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
17 / 26
What Does the Triggering Condition Look Like?
Corollary 1
Consider again
ẋ = f (x, k(x̂)) .
Define the triggering condition of the ith subsystem as
Ti (xi , ei ) = η̂i (kei k) − max{σi−1 (Vi (xi )), ci } ≥ 0 ,
then the equilibrium is practically asymptotically stable.
Important:
The triggering condition only uses local information.
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
17 / 26
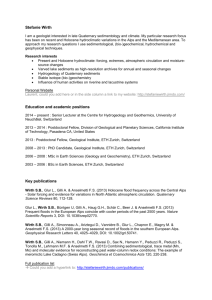
Practical Stabilization Prevents Zeno Behavior
Lemma 1
Setting ci = 0 in Corollary 1 can lead to Zeno solutions. If the triggering
condition from Theorem 1 exhibits Zeno behavior, then a subsystem
triggering infinitely often has to converge to zero in finite time.
Vi (xi )
Vi (xi )
ci
kei k
kei k
η̂i (kei k) ≤ max{σi−1 (Vi (xi )), ci }
η̂i (kei k) ≤ σi−1 (Vi (xi ))
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
18 / 26
Outline
1
Motivation
2
Preliminaries (Standing Assumptions and Introduction to Small-Gain
Conditions)
3
Practical Stabilization
4
Numerical Example
5
Outlook and Summary
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
19 / 26
Example
ẋ1 =x1 x2 + x12 u1
ẋ2 =x12 + u2
u1 = −(x1 + e1 ) , u2 = −k(x2 + e2 ) , k > 0 .
1
Vi (xi ) = xi2 ,
2
1
σ1 ◦ η̂1 (r ) = √ r 2 ,
8ν
4
σ2 ◦ η̂2 (r ) =
ν 2k 2 2
r
4
4.5
4
3
3.5
2
3
1
2.5
2
0
1.5
−1
1
−2
0.5
−3
0
0.05
0.1
0.15
0.2
0.25
0.3
Fabian Wirth (University of Würzburg)
0.35
0.4
0.45
0.5
0
0
MTNS12
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
09.07.2012
0.45
0.5
20 / 26
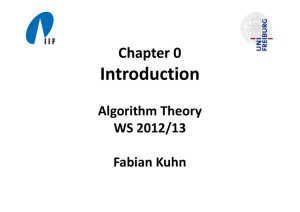
Effect of different ci
4
4.5
4
3
3.5
17 events
2
c2 = 0.16
3
1
2.5
2
0
1.5
−1
1
−2
0.5
−3
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0
0.5
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.35
0.4
0.45
0.5
4.5
4
4
3
3.5
6 events
2
c2 = 1.86
3
1
2.5
2
0
1.5
−1
1
−2
−3
0.5
0
0.05
0.1
0.15
0.2
0.25
0.3
Fabian Wirth (University of Würzburg)
0.35
0.4
0.45
0.5
MTNS12
0
0
0.05
0.1
0.15
0.2
0.25
0.3
09.07.2012
0.5
21 / 26
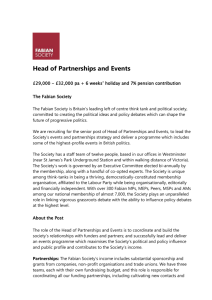
Larger ci do not necessarily lead to fewer events
350
# of events
300
250
200
150
100
c=1.86
50
0
0
1
Fabian Wirth (University of Würzburg)
2
3
4
MTNS12
5
6
7
c2
8
09.07.2012
22 / 26
Outline
1
Motivation
2
Preliminaries (Standing Assumptions and Introduction to Small-Gain
Conditions)
3
Practical Stabilization
4
Numerical Example
5
Outlook and Summary
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
23 / 26
Some Remarks
Possible extensions
Different comparison functions for the gains (e.g. + instead of max)
Relation between Assumption 2 and known small-gain theorems
External disturbances
x̂˙ 6= 0
Quantization
ci → 0 sufficiently slowly will result in asymptotic stability
Open problems
Delay and packet loss
Collision avoidance
Choosing ci in an “optimal” manner
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
24 / 26
Summary
Summary
ISS Lyapunov functions + small gain + event based sampling
stability
Event based sampling can lead to fewer transmissions
The systems decide how often they have to transmit to ensure stability
This decision is based only on local information
Hybrid systems can exhibit Zeno behavior
Practical stability can prevent the occurrence of Zeno behavior
Choosing ci that leads to a minimal number of events is not trivial
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
25 / 26
Thank you for your attention!
Fabian Wirth (University of Würzburg)
MTNS12
09.07.2012
26 / 26