MULTISERVER RETRIAL QUEUES WITH AFTER
advertisement

NUMERICAL ALGEBRA,
CONTROL AND OPTIMIZATION
Volume 1, Number 4, December 2011
doi:10.3934/naco.2011.1.639
pp. 639–656
MULTISERVER RETRIAL QUEUES WITH AFTER-CALL WORK
Tuan Phung-Duc
Graduate School of Informatics, Kyoto University
Yoshida Honmachi, Sakyo-ku Kyoto 606-8501, Japan
Ken’ichi Kawanishi
Department of Computer Science, Gunma University
1-5-1 Tenjin-cho, Kiryu, Gunma 376-8515, Japan
Abstract. This paper considers a multiserver queueing system with finite
capacity. Customers that find the service facility being fully occupied are
blocked and enter a virtual waiting room (called orbit). Blocked customers
stay in the orbit for an exponentially distributed time and retry to occupy an
idle server again. After completing a service, the server starts an additional
job that we call an after-call work. We formulate the queueing system using
a continuous-time level-dependent quasi-birth-and-death process, for which a
sufficient condition for the ergodicity is derived. We obtain an approximation
to the stationary distribution by a direct truncation method whose truncation
point is simply determined using an asymptotic analysis of a single server retrial
queue. Some numerical examples are presented in order to show the influence
of parameters on the performance of the system.
1. Introduction. Retrial queues are characterized by the fact that arriving customers that find the service facility being fully occupied enter an orbit to retry for
their luck after some random time. Recently, retrial queues are paid much attention
because they have applications in various telecommunication systems, service systems and call centers [3, 7, 11]. The authors in [3, 7, 11] state that retrial phenomena
cannot be disregarded in a careful design of these systems. Furthermore, numerical
results in [17] show that there is a large difference between the blocking probability
obtained by a multiserver retrial queue and that computed by the corresponding
loss model when the retrial rate is large.
Nowadays, call center is an important industry, which provides a large amount
of employment in many countries. Therefore, optimal design of call centers is important from both practical and theoretical points of view. In call centers, after-call
work is an additional operation that should be done by a call agent immediately
after finishing a call. An after-call work (also known as post-call activity and wrapup) includes entering or updating data into the customer database to complete the
transaction. It should be noted that a call agent cannot answer a new call while
handling an after-call work; however the call line is released. As a result, an arriving call can occupy a released call line in order to wait for a free call agent. If the
system capacity (i.e., the number of call lines) is infinite, the after-call work can
2000 Mathematics Subject Classification. Primary: 60K25, 68M20; Secondary: 90B22.
Key words and phrases. Multiserver retrial queue, after-call work, call center, level-dependent
QBD process, truncation method.
639
640
TUAN PHUNG-DUC AND KEN’ICHI KAWANISHI
be regarded as a part of the service time. However, since the system capacity is
limited in real call centers, the blocking probability is influenced by the after-call
work. In fact, the effects of the after-call work on the performance of queueing
models are discussed by several authors [6, 8, 9]. These papers conclude that the
blocking probability computed by a queueing model with after-call work is smaller
than that obtained by the corresponding queueing model where the duration of
after-call work is included in the service time.
In practice, both retrial and after-call work coexist in a call center and they
influence each other. Therefore, the two phenomena should be taken into account
concurrently in order to obtain an accurate performance evaluation of a call center.
However, to the best of our knowledge, there is no literature that analyzes these
two phenomena in a unified way. This fact motivates us to consider a multiserver
queueing system with both retrial and after-call work in order to quantify the mutual
effects of both phenomena on the performance of call centers.
We formulate the queueing system by a level-dependent quasi-birth-and-death
(QBD) process, where the level is referred to as the number of customers in the
orbit. Because the Markov chain has an infinite state space, we need to establish
an ergodic condition under which the stationary distribution exists. To this end,
we derive a sufficient condition of the ergodicity for the Markov chain by exploiting
the special structure of the model and by using the approach by Diamond and
Alfa (1998) [2]. Furthermore, we show that the ergodic condition is significantly
simplified and is more intuitive when the number of call agents is not bigger than
the number of call lines.
Under the ergodic condition, we analyze the stationary distribution of the Markov
chain. Unfortunately, analytical solutions for the stationary distributions of retrial
queues are difficult and are obtained in a few special cases [15]. In this paper, we focus on an approximation solution to the stationary distribution from which we compute some performance measures. In the context of M/M/𝑐/𝑐 retrial queues, many
approximation methods have been developed. The common idea of these methods
is to approximate the analytically intractable Markov chain of retrial queues by
another analytically tractable one.
Neuts and Rao (1990) [14] approximate the original level-dependent QBD process of M/M/𝑐/𝑐 retrial queues by a level-independent QBD process with multiple
boundary levels. In particular, the retrial rates are assumed to be constant beyond a certain level. The method by Falin and Templeton (1997) [5] assumes that
all the servers are busy if the number of customers in the orbit exceeds a certain
level. Artalejo and Pozo (2002) [1] relax the assumption of Falin and Templeton
(1997) [5] by assuming that there is at most one idle server when the number of
customers in the orbit exceeds some level. The certain level in these methods is
referred to as the truncation point, which plays an important role in the accuracy
of the approximations.
In this paper, we obtain an approximation to the stationary distribution of our
level-dependent QBD process by a direct-truncation method [17], for which the
truncation point is determined based on asymptotic results of a single server retrial
queue [10]. The advantage of our method is that the truncation point is determined
without any matrix computation and therefore the computational cost is low. It
should be noted that the methods [1, 5, 14] aim at minimizing the truncation point
while our purpose is to find a large enough truncation point from which the tail
MULTISERVER RETRIAL QUEUES WITH AFTER-CALL WORK
641
probabilities can be disregarded. To the best of our knowledge, our paper is the
first that obtains the truncation point using an asymptotic analysis.
The rest of the paper is organized as follows. Section 2 describes the retrial
queueing system with after-call work. In Section 3, we present a level-dependent
QBD formulation of the queueing system and derive a sufficient condition for the
ergodicity of the queueing system. Section 4 presents an algorithm to obtain the
stationary distribution. Section 5 devotes to the presentation of numerical examples
for the performance measures. Finally, Section 6 concludes the paper and discusses
some extensions.
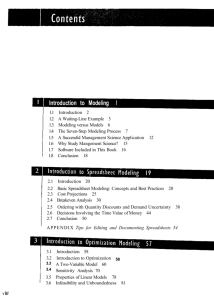
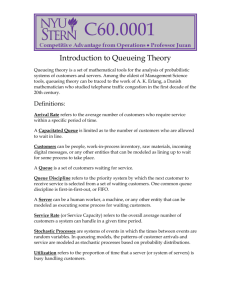
2. System model. We consider a queueing system shown in Fig. 1. The queueing
system has 𝑐 identical servers which correspond 𝑐 call agents in a call center. The
capacity of the queueing system is 𝐾 which is equivalent to 𝐾 call lines in a call
center. In addition, we make the following assumptions for the queueing system.
servers
1
queue
K
arrivals
.
.
.
.
3
2
1
2
departures
3
.
retry
blocked
.
.
.
.
.
c
orbit
Figure 1. Queueing system under study.
1. Primary customers arrive at the queue according to a Poisson process with
rate 𝜆. An arriving customer joins the queue if a waiting space (i.e., a call
line) is available. Customers in the queue are served by the first-come firstserved (FCFS) discipline. The service time of customers follows an exponential
distribution with mean 1/𝜇.
2. After the completion of a service, the customer leaves the system while the
server is forced to handle an additional job whose duration follows an exponential distribution with mean 1/𝜉. We call this additional job an after-call
work. It should be noted that during the after-call work, the server cannot
commence the service of any waiting customer. However, a waiting space is
released for a newly arrived customer.
3. An arriving customer that finds the queue (i.e., 𝐾 call lines) being fully occupied joins the orbit. After an exponentially distributed time with mean 1/𝜈,
each customer in the orbit retries to enter the queue again. The behavior of
a retrial customer is the same as that of a primary customer.
Note that it is not necessary to assume 𝐾 ≥ 𝑐 for our queueing system. In case of
𝐾 < 𝑐, at most 𝐾 customers are served in parallel and each of the rest 𝑐 − 𝐾 servers
either handles an after-call work or is idle. In this case, some idle servers cannot
642
TUAN PHUNG-DUC AND KEN’ICHI KAWANISHI
serve customers because the queueing system cannot accommodate more than 𝐾
customers due to the limited capacity. It is equivalent to saying that at most 𝐾
customers can hold the call lines in a call center. There is also the case that all 𝑐
servers are handling after-call work for which the maximum number of customers
that can wait for a free server is equal to 𝐾.
3. Markov chain and ergodic condition.
3.1. Markov chain. Let 𝐶1 (𝑡) and 𝐶2 (𝑡) denote the number of servers handling
an after-call work and the number of customers in the queue at time 𝑡, respectively.
Furthermore, let 𝑁 (𝑡) denote the number of customers in the orbit at time 𝑡. Then,
it is easy to see that {𝑋(𝑡); 𝑡 ≥ 0} = {(𝐶1 (𝑡), 𝐶2 (𝑡), 𝑁 (𝑡)); 𝑡 ≥ 0} forms a Markov
chain on the state space 𝒮 defined by
𝒮 = {(𝑖, 𝑗, 𝑘) : 𝑖 = 0, 1, . . . , 𝑐, 𝑗 = 0, 1, . . . , 𝐾, 𝑘 ∈ ℤ+ },
where ℤ+ = {0, 1, . . . }. Let 𝑞(𝑖,𝑗,𝑘),(𝑙,𝑚,𝑛) denote the transition rate from state
(𝑖, 𝑗, 𝑘) to state (𝑙, 𝑚, 𝑛). We then have
⎧
𝜆,
(𝑙, 𝑚, 𝑛) = (𝑖, 𝑗 + 1, 𝑘),
𝑖𝜉,
(𝑙,
𝑚, 𝑛) = (𝑖 − 1, 𝑗, 𝑘),
⎨
min(𝑐 − 𝑖, 𝑗)𝜇, (𝑙, 𝑚, 𝑛) = (𝑖 + 1, 𝑗 − 1, 𝑘), 𝑗 ≥ 1,
𝑞(𝑖,𝑗,𝑘),(𝑙,𝑚,𝑛) =
𝑘𝜈,
(𝑙, 𝑚, 𝑛) = (𝑖, 𝑗 + 1, 𝑘 − 1),
−𝑞
−
𝑘𝜈,
(𝑙, 𝑚, 𝑛) = (𝑖, 𝑗, 𝑘),
𝑖,𝑗
⎩
0,
otherwise,
for 𝑗 = 0, 1, . . . , 𝐾 − 1, and
⎧
⎨
𝑞(𝑖,𝑗,𝑘),(𝑙,𝑚,𝑛) =
⎩
𝜆,
𝑖𝜉,
min(𝑐 − 𝑖, 𝑗)𝜇,
−𝑞𝑖,𝑗 ,
0,
(𝑙, 𝑚, 𝑛) = (𝑖, 𝑗, 𝑘 + 1),
(𝑙, 𝑚, 𝑛) = (𝑖 − 1, 𝑗, 𝑘),
(𝑙, 𝑚, 𝑛) = (𝑖 + 1, 𝑗 − 1, 𝑘),
(𝑙, 𝑚, 𝑛) = (𝑖, 𝑗, 𝑘),
otherwise,
for 𝑗 = 𝐾, where 𝑞𝑖,𝑗 = 𝜆 + 𝑖𝜉 + min(𝑐 − 𝑖, 𝑗)𝜇. Furthermore, let 𝑸 = [𝑞(𝑖,𝑗,𝑘),(𝑙,𝑚,𝑛) ]
denote the
∪ infinitesimal generator of {𝑋(𝑡); 𝑡 ≥ 0}. We separate the state space
as 𝒮 = 𝑛∈ℤ+ ℓ(𝑛), where ℓ(𝑛) = {(𝑖, 𝑗, 𝑘) : 𝑖 = 0, 1, . . . , 𝑐, 𝑗 = 0, 1, . . . , 𝐾, 𝑘 = 𝑛}.
The infinitesimal generator 𝑸 has a block tridiagonal structure and is given by
⎤
⎡ (0)
(0)
𝑸1
𝑸0
𝑶
𝑶
⋅⋅⋅
(1)
(1)
⎢ (1)
⎥
𝑸1
𝑸0
𝑶
⋅⋅⋅ ⎥
⎢ 𝑸2
⎥
⎢
(2)
(2)
(2)
𝑸2
𝑸1
𝑸0
⋅⋅⋅ ⎥
𝑸=⎢
⎢ 𝑶
⎥,
(3)
(3)
⎢ 𝑶
⎥
𝑶
𝑸
𝑸
⋅
⋅
⋅
2
1
⎦
⎣
..
..
..
..
..
.
.
.
.
.
(𝑛)
(𝑛)
(𝑛)
where 𝑸0 , 𝑸1 and 𝑸2 are square matrices of order (𝑐 + 1)(𝐾 + 1), and 𝑶
denotes a matrix of an appropriate size with entries being zeros. It is clear that
{𝑋(𝑡); 𝑡 ≥ 0} is a level-dependent QBD process, where the level and the phase
are referred to as 𝑁 (𝑡) and (𝐶1 (𝑡), 𝐶2 (𝑡)), respectively. In this paper, we assume
that {𝑋(𝑡); 𝑡 ≥ 0} is ergodic, whose sufficient condition will be derived in the next
section. Let 𝜋𝑖,𝑗,𝑘 denote the stationary distribution of {𝑋(𝑡); 𝑡 ≥ 0}, i.e.,
𝜋𝑖,𝑗,𝑘 = lim Pr[𝐶1 (𝑡) = 𝑖, 𝐶2 (𝑡) = 𝑗, 𝑁 (𝑡) = 𝑘].
𝑡→∞
MULTISERVER RETRIAL QUEUES WITH AFTER-CALL WORK
643
We arrange the states (𝑖, 𝑗) for 𝑖 = 0, 1, . . . , 𝑐 and 𝑗 = 0, 1, . . . , 𝐾 in a reverse lexicographic order, i.e., (0, 0), (1, 0), . . . , (𝑐, 0), (0, 1), . . . , (𝑐, 𝐾). Let 𝝅 𝑛 and 𝝅 denote
𝝅𝑛 = (𝜋0,0,𝑛 , 𝜋1,0,𝑛 , . . . , 𝜋𝑐,𝐾,𝑛 ) and 𝝅 = (𝝅 0 , 𝝅 1 , . . . , 𝝅𝑛 , . . .), respectively. We then
have
𝝅𝑸 = 0,
𝝅1⊤ = 1,
where 0 and 1⊤ denote a row vector and a column vector of zeros and ones with an
appropriate size, respectively. Moreover, according to the matrix analytic method,
{𝝅𝑛 ; 𝑛 ∈ ℤ+ } has a matrix-product form solution given by
𝝅𝑛 = 𝝅 0
𝑛
∏
𝑹(𝑘) ,
𝑛 ∈ ℕ,
𝑘=1
where ℕ = {1, 2, . . . }. The boundary vector 𝝅0 is the solution of
(
)
∞ ∏
𝑛
∑
(0)
(1) (1)
(𝑘)
𝝅 0 (𝑸1 + 𝑹 𝑸2 ) = 0,
𝑹
1⊤ = 1,
𝝅0 𝑰 +
𝑛=1 𝑘=1
where 𝑰 denotes an identity matrix with an appropriate size and {𝑹(𝑛) ; 𝑛 ∈ ℕ} is
the minimal nonnegative solution to the following system of equations:
(𝑛−1)
𝑸0
(𝑛)
(𝑛+1)
+ 𝑹(𝑛) 𝑸1 + 𝑹(𝑛) 𝑹(𝑛+1) 𝑸2
= 𝑶,
𝑛 ∈ ℕ.
(𝑛)
(𝑛)
Under the reverse lexicographic order, the square matrices 𝑸0 (𝑛 ∈ ℤ+ ) and 𝑸2
(𝑛 ∈ ℕ) are given by
⎤
⎡
𝑶 𝑵 (𝑛)
𝑶
⋅⋅⋅
𝑶
⎤
⎡
𝑶 ⋅⋅⋅ ⋅⋅⋅ 𝑶
⎢
.. ⎥
..
⎢ 𝑶
.
𝑶
𝑵 (𝑛)
. ⎥
⎢ .. . .
.. ⎥
⎥
⎢
⎥
⎢ .
.
.
⎥
⎢
(𝑛)
(𝑛)
..
..
..
⎥,
𝑸
=
𝑸0 = ⎢
⎥,
⎢
2
.
.
⎥
⎢ .
.
𝑶
⎥
⎢
⎣ ..
⎥
𝑶 𝑶 ⎦
⎢ .
(𝑛) ⎦
⎣ ..
𝑶 𝑵
𝑶 ⋅ ⋅ ⋅ 𝑶 𝑨0
𝑶 ⋅⋅⋅
⋅⋅⋅
𝑶
𝑶
where 𝑨0 = 𝜆𝑰 and 𝑵 (𝑛) = 𝑛𝜈𝑰. We further have
⎡
𝑨0,1 − 𝑛𝜈𝑰
𝑨0
𝑶
⎢
⎢
𝑨1,2
𝑨1,1 − 𝑛𝜈𝑰
𝑨0
⎢
⎢
⎢
𝑶
𝑨2,2
𝑨2,1 − 𝑛𝜈𝑰
(𝑛)
𝑸1 = ⎢
⎢
.
.
..
..
..
⎢
.
⎢
⎢
.
..
..
⎣
.
𝑶
⋅⋅⋅
⋅⋅⋅
⋅⋅⋅
..
.
..
.
..
.
..
.
𝑶
for 𝑛 ∈ ℤ+ , where 𝑨𝑗,2 (𝑗 = 1, 2 . . . , 𝐾) and 𝑨𝑗,1 (𝑗
⎡
0 min(𝑐, 𝑗)𝜇
0
⎢
⎢ 0
0
min(𝑐 − 1, 𝑗)𝜇
⎢
⎢ ..
..
𝑨𝑗,2 = ⎢ .
.
⎢
⎢ .
.
⎣ .
0
⋅⋅⋅
⋅⋅⋅
⋅⋅⋅
..
.
𝑶
..
.
..
.
..
.
𝑶
𝑨𝐾−1,1 − 𝑛𝜈𝑰
𝑨𝐾,2
𝑨0
𝑨𝐾,1
= 0, 1, . . . , 𝐾) are given by
⎤
⋅⋅⋅
0
..
⎥
⎥
.
⎥
⎥
..
⎥,
.
0
⎥
⎥
0 min(1, 𝑗)𝜇 ⎦
0
0
⎤
⎥
⎥
⎥
⎥
⎥
⎥,
⎥
⎥
⎥
⎥
⎦
644
TUAN PHUNG-DUC AND KEN’ICHI KAWANISHI
and by
⎡
𝑨𝑗,1
−𝑞0,𝑗
0
0
𝜉
−𝑞1,𝑗
0
0
..
.
..
.
0
2𝜉
..
.
−𝑞2,𝑗
..
.
⎢
⎢
⎢
⎢
⎢
=⎢
⎢
⎢
⎢
⎢
⎣
⋅⋅⋅
..
⋅⋅⋅
.
⋅⋅⋅
⋅⋅⋅
0
..
.
..
.
..
.
..
.
0
0
..
.
−𝑞𝑐−1,𝑗
𝑐𝜉
0
−𝑞𝑐,𝑗
0
⎤
⎥
⎥
⎥
⎥
⎥
⎥.
⎥
⎥
⎥
⎥
⎦
We observe that the row sums of 𝑨𝑗 = 𝑨0 + 𝑨𝑗,1 + 𝑨𝑗,2 (𝑗 = 1, 2, . . . , 𝐾) are
all equal to zero. Furthermore, since 𝑨𝑗 has negative diagonal and nonnegative
off-diagonal elements, 𝑨𝑗 is an infinitesimal generator of an irreducible Markov
chain.
3.2. Ergodic condition. We consider an irreducible continuous-time Markov chain
{𝑆(𝑡); 𝑡 ≥ 0} on state space {0, 1, . . . , 𝑐}, whose infinitesimal generator is given by
𝑨𝐾 = 𝑨0 + 𝑨𝐾,1 + 𝑨𝐾,2 . Let 𝒔𝐾 = (𝑠0,𝐾 , 𝑠1,𝐾 , . . . , 𝑠𝑐,𝐾 ) denote the stationary
distribution of {𝑆(𝑡); 𝑡 ≥ 0}. We have
𝒔𝐾 𝑨𝐾 = 0,
𝒔𝐾 1⊤ = 1.
It is easy to see that {𝑆(𝑡); 𝑡 ≥ 0} is a birth-and-death process and then we obtain
⎛
⎞−1
𝑐 𝑖−1
∑
∏ min(𝑐 − 𝑗, 𝐾)𝜇
⎠ ,
𝑠0,𝐾 = ⎝1 +
(𝑖
−
𝑗)𝜉
𝑖=1 𝑗=0
𝑠𝑖,𝐾 = 𝑠0,𝐾
𝑖−1
∏
𝑗=0
min(𝑐 − 𝑗, 𝐾)𝜇
,
(𝑖 − 𝑗)𝜉
𝑖 = 1, 2, . . . , 𝑐.
We define 𝜌 as
𝜌=
𝒔𝐾 𝑨0 1⊤
= 𝑐−1
∑
𝒔𝐾 𝑨𝐾,2 1⊤
𝜆
,
𝑠𝑖,𝐾 min(𝑐 − 𝑖, 𝐾)𝜇
𝑖=0
where we have used
𝒔𝐾 𝑨0 1⊤ = 𝜆,
𝒔𝐾 𝑨𝐾,2 1⊤ =
𝑐−1
∑
𝑠𝑖,𝐾 min(𝑐 − 𝑖, 𝐾)𝜇.
𝑖=0
Proposition 1. If 𝜌 < 1, then {𝑋(𝑡); 𝑡 ≥ 0} is regular and ergodic.
Proof. A proof of this proposition is given in the Appendix A.
Remark 1. An intuitive interpretation of Proposition 1 is given as follows. The
stability condition is equivalent to
𝜆<
𝑐−1
∑
𝑠𝑖,𝐾 min(𝑐 − 𝑖, 𝐾)𝜇,
𝑖=0
whose the left hand side is the arrival rate to the system and the right hand side
is the average total departure rate of calls from the servers while all the 𝐾 waiting
positions are fully occupied.
MULTISERVER RETRIAL QUEUES WITH AFTER-CALL WORK
645
For the case where 𝐾 < 𝑐, the expression for {𝑠𝑖,𝐾 ; 𝑖 = 0, 1, . . . , 𝑐} may not be
further simplified. However, if 𝐾 ≥ 𝑐, then the expression for {𝑠𝑖,𝐾 ; 𝑖 = 0, 1, . . . , 𝑐}
is reduced to
( )
𝑐 𝑖
𝑠𝑖,𝐾 =
𝑝 (1 − 𝑝)𝑐−𝑖 ,
𝑖 = 0, 1, . . . , 𝑐,
𝑖
where 𝑝 = 1/(1 + 𝜉/𝜇), i.e., {𝑠𝑖,𝐾 ; 𝑖 = 0, 1, . . . , 𝑐} is a binomial distribution. We
obtain
(
)
𝜆 1
1
𝜌=
+
,
𝑐 𝜇 𝜉
representing the traffic intensity of a server. The probability 𝑝 can be interpreted
as the fraction of the time that a server is in the after-call work to the total time of
the service and the after-call work. In this case, it is easy to obtain the following
two corollaries.
Corollary 1. In case of 𝐾 ≥ 𝑐, {𝑋(𝑡); 𝑡 ≥ 0} is ergodic if
(
)
1
1
𝜆
+
< 𝑐.
𝜇 𝜉
Remark 2. The condition is quite natural because the left hand side represents
the total offered load, which must be smaller than the number of servers in a stable
queueing system. It is intuitively suggested that the sufficient condition is also the
necessary condition.
Corollary 2. For the case of 𝐾 ≥ 𝑐, then the condition further reduces to
𝜆 < 𝑐𝜇,
as 𝜉 → ∞.
Remark 3. Corollary 2 agrees with the ergodic condition of the conventional
M/M/𝑐/𝐾 retrial queue presented in [15]. It should be noted that when 𝜉 → ∞,
our system is reduced to the conventional M/M/𝑐/𝐾 retrial queue with the arrival
rate 𝜆 and the service rate 𝜇 but without after-call work.
The sufficient condition in case of 𝐾 ≥ 𝑐 can also be expressed by
𝑐𝜇𝜉
𝜆<
,
𝜇+𝜉
whose right hand side is interpreted in different ways. If we define an effective
service rate 𝜇
¯ as the service rate multiplied by the fraction of time that a server
is in service to the time that the server is in service and after-call work, then we
have 𝜇
¯ = 𝜇𝜉/(𝜇 + 𝜉). Thus, the sufficient condition reads as 𝜆 < 𝑐¯
𝜇. If we consider
a virtual server that handles only the service time exponentially distributed with
mean 1/𝜇, then the average number of such virtual servers 𝑐¯ in the system can be
considered as 𝑐¯ = 𝑐𝜉/(𝜇 + 𝜉). Hence, the condition reads as 𝜆 < 𝑐¯𝜇.
In case of 𝐾 = 1, we can see that
(
( )𝑖 )−1
( )𝑖
𝑐
∑
1 𝜇
1 𝜇
𝑠0,1 = 1 +
,
𝑠𝑖,1 = 𝑠0,1
,
𝑖 = 1, 2, . . . , 𝑐.
𝑖! 𝜉
𝑖! 𝜉
𝑖=1
Then, the following corollary is straightforward from the condition 𝜌 < 1.
Corollary 3. If 𝐾 = 1, then the condition
𝜆 < 𝜇(1 − 𝑠𝑐,1 )
is sufficient for the ergodicity of {𝑋(𝑡); 𝑡 ≥ 0}.
646
TUAN PHUNG-DUC AND KEN’ICHI KAWANISHI
Remark 4. Let 𝐵(𝛼, 𝑚) denote the Erlang loss formula, where 𝛼 > 0 is the load
offered to 𝑚 channels. It is easy to show that 𝑠𝑐,1 = 𝐵(𝜇/𝜉, 𝑐) in case: 𝐾 = 1.
Because of the inequality 𝐵(𝜇/𝜉, 𝑐) ≤ 𝐵(𝜇/𝜉, 1) for 𝑐 ∈ ℕ, we have
𝜇𝜉
= 𝜇(1 − 𝑠1,1 ) ≤ 𝜇(1 − 𝑠𝑐,1 ).
𝜇+𝜉
Because 𝑠1,𝐾 = 𝑠1,1 (𝐾 ∈ ℕ) for the case of 𝑐 = 1, the inequality shows that the
sufficient condition for the case 𝐾 ≥ 𝑐 = 1 implies that for the case 𝑐 ≥ 𝐾 = 1, but
not necessarily vice versa.
4. Algorithm for stationary distribution. As is reviewed in the previous section, the stationary distribution {𝝅𝑛 ; 𝑛 ∈ ℤ+ } of our level-dependent QBD process
is expressed in terms of a sequence of rate matrices {𝑹(𝑛) ; 𝑛 ∈ ℕ}. Unfortunately,
𝑹(𝑛) does not have an explicit form in general. Therefore, in Section 4.1, we focus
on computing an approximation {ˆ
𝝅 𝑛 ; 𝑛 = 0, 1, . . . , 𝑁 } to {𝝅 𝑛 ; 𝑛 ∈ ℤ+ } where 𝑁
is referred to as the truncation point given in advance. In Section 4.2, we use the
asymptotic result for M/G/1 retrial queues presented by Kim et al. (2007) [10] in
order to determine 𝑁 .
4.1. Stationary distribution. Once the truncation point 𝑁 is given, the stationary distribution is easily obtained by several methods [14, 16]. Neuts and Rao (1990)
approximate the original level-dependent QBD process by a level-independent one
by assuming that the retrial rate is given by 𝑁 𝜈 provided that there are 𝑛 (≥ 𝑁 )
customers in the orbit. In Neuts and Rao’s method, the tail probability after 𝑁 can
also be approximately obtained. However, if we can choose a sufficiently large 𝑁 , the
tail probability after level 𝑁 can be disregarded. Therefore, in this paper, we adopt
a direct-truncation method recently developed by Phung-Duc et al. (2010b) [16].
This method consists of Algorithms 1 and 2 for the computations of the rate matrix
at 𝑁 and an approximation to the stationary distribution, respectively. The ideas
behind the method are presented in Propositions 2 and 3.
Proposition 2 (Proposition 1 in Phung-Duc et al. (2011) [17]). Let ℳ denote a
set of real square matrices of order (𝑐 + 1)(𝐾 + 1). We define 𝑅𝑛 : ℳ → ℳ as
(
)−1
(𝑛−1)
(𝑛)
(𝑛+1)
𝑅𝑛 (𝑿) = 𝑸0
−𝑸1 − 𝑿𝑸2
,
𝑛 ∈ ℕ.
Then, the matrices {𝑹(𝑛) ; 𝑛 ∈ ℕ} satisfy the following backward recursive equation.
𝑹(𝑛) = 𝑅𝑛 (𝑹(𝑛+1) ) = 𝑅𝑛 ∘ 𝑅𝑛+1 ∘ ⋅ ⋅ ⋅ ∘ 𝑅𝑛+𝑘 ∘ ⋅ ⋅ ⋅ ,
𝑛 ∈ ℕ,
where 𝑓 ∘ 𝑔(⋅) = 𝑓 (𝑔(⋅)).
Proposition 2 shows that 𝑹(𝑛) can be viewed as an infinite matrix continued
fraction. The following proposition provides a sequence of matrices that converges
to 𝑹(𝑛) .
Proposition 3 (Proposition 2.4 in Phung-Duc et al. (2010b) [16]). If we define
(𝑛)
the matrix sequence {𝑹𝑘 ; 𝑘 ∈ ℤ+ } by
(𝑛)
𝑹0
(𝑛)
𝑹𝑘
= 𝑶,
=
𝑛 ∈ ℕ,
(𝑛+1)
𝑅𝑛 (𝑹𝑘−1 )
= ⋅ ⋅ ⋅ = 𝑅𝑛 ∘ 𝑅𝑛+1 ∘ ⋅ ⋅ ⋅ ∘ 𝑅𝑛+𝑘−1 (𝑶),
𝑘, 𝑛 ∈ ℕ,
MULTISERVER RETRIAL QUEUES WITH AFTER-CALL WORK
then we have
(𝑛)
lim 𝑹𝑘
𝑘→∞
= 𝑹(𝑛) ,
647
𝑛 ∈ ℕ.
(𝑛)
Proposition 3 implies that 𝑹𝑘 is the 𝑘-th order approximation of 𝑹(𝑛) . It also
(𝑛)
means that we can obtain 𝑹(𝑛) with a sufficient accuracy if we compute 𝑹𝑘 for a
large value of 𝑘. These observations lead to Algorithm 1. Note that {𝑘𝑙 ; 𝑙 ∈ ℤ+ } in
Algorithm 1 is an increasing sequence of nonnegative integers.
We use Algorithm 2 in order to obtain an approximation to the stationary distribution. We denote by {ˆ
𝝅𝑛 ; 𝑛 = 0, 1, . . . , 𝑁 } the approximate distribution on
𝒮𝑁 = ℓ(0) ∪ ℓ(1) ∪ ⋅ ⋅ ⋅ ∪ ℓ(𝑁 ). It should be noted that {ˆ
𝝅𝑛 ; 𝑛 = 0, 1, . . . , 𝑁 } is
the stationary distribution of the censored Markov chain on 𝒮𝑁 associated with
ˆ (𝑁 ) is replaced by 𝑹(𝑁 ) (see also Bright and Taylor
{𝑋(𝑡); 𝑡 ≥ 0} provided that 𝑹
(1995) [4]).
ˆ (𝑛) .
Table 1. Computation of 𝑹
Begin Algorithm 1
(𝑛)
(𝑛)
(𝑛)
Input: {𝑸0 , 𝑸1 ; 𝑛 ∈ ℤ+ }, {𝑸2 ; 𝑛 ∈ ℕ}, {𝑘𝑙 ; 𝑙 ∈ ℤ+ }, 𝜖1 .
ˆ (𝑛) .
Output: 𝑹
𝑙 ⇐ 1;
(𝑛)
(𝑛)
Compute 𝑹𝑘1 and 𝑹𝑘0 using Proposition 3.
(𝑛)
(𝑛)
while ∣∣𝑹𝑘𝑙 − 𝑹𝑘𝑙−1 ∣∣∞ > 𝜖1 do
𝑙 ⇐ 𝑙 + 1;
(𝑛)
(𝑛)
Compute 𝑹𝑘𝑙 and 𝑹𝑘𝑙−1 using Proposition 3.
end while
ˆ (𝑛) ⇐ 𝑹(𝑛) ;
𝑹
𝑘𝑙
End Algorithm 1
4.2. Truncation point. We need to choose the truncation point beyond which the
tail probability is small enough to be disregarded. However, since our model does
not have an explicit solution, a direct evaluation of the tail probability is difficult.
It is reported in [15] that the tail probability of an M/M/𝑐/𝑐 retrial queue (𝑐 ≥ 1)
is less than or equal to that of an M/M/1/1 retrial queue with the same traffic
intensity and retrial rate. This fact suggests us to determine a truncation point
based on an analytic result of a conventional M/G/1 retrial queue with the same
retrial rate and traffic intensity but without after-call work. In Section 4.2.1 we
summarize the asymptotic results of Kim et al. (2007) [10]. In Section 4.2.2, we use
the results of Section 4.2.1 to obtain an asymptotic formula for the tail probability
of our M/G/1 retrial queue, based on which we determine the truncation point 𝑁 .
4.2.1. Asymptotic results for light-tailed M/G/1 retrial queues. This section summarizes an asymptotic analysis of light-tailed M/G/1 retrial queues presented by
Kim et al. (2007) [10]. We consider an M/G/1 retrial queue where customers arrive
at the server according to a Poisson process with rate 𝜆. The service time of each
customer is an independent and identically distributed random variable denoted by
𝐵, whose Laplace–Stieltjes transform (LST) is given by 𝛽(𝑠) = E[𝑒−𝑠𝐵 ]. An arriving customer is either immediately served if the server is idle or joins the orbit. Each
648
TUAN PHUNG-DUC AND KEN’ICHI KAWANISHI
Table 2. Computation of the stationary distribution.
Begin Algorithm 2
(𝑛)
(𝑛)
(𝑛)
Input: {𝑸0 , 𝑸1 ; 𝑛 ∈ ℤ+ }, {𝑸2 ; 𝑛 ∈ ℕ}, {𝑘𝑙 ; 𝑙 ∈ ℤ+ }, 𝜖1 , 𝜖2 .
ˆ (𝑛) ; 𝑛 = 1, 2, . . . , 𝑁 }.
Output: {ˆ
𝝅𝑛 ; 𝑛 = 0, 1, . . . , 𝑁 }, {𝑹
Compute 𝑁 using (5).
ˆ (𝑁 ) using Algorithm 1.
Compute 𝑹
for 𝑛 = 1 to 𝑁 − 1 do
ˆ (𝑁 −𝑛) ⇐ 𝑅𝑁 −𝑛 (𝑹
ˆ (𝑁 +1−𝑛) );
𝑹
end for
(𝑛)
ˆ (1) 𝑸(1) ) = 0 with 𝒙0 1⊤ = 1.
Compute 𝒙0 such that 𝒙0 (𝑸 + 𝑹
0
𝑠 ⇐ 𝒙0 1⊤ ;
for 𝑛 = 1 to 𝑁 do
ˆ (𝑛) ;
𝒙𝑛 ⇐ 𝒙𝑛−1 𝑹
2
𝑠 ⇐ 𝑠 + 𝒙𝑛 1⊤ ;
end for
for 𝑛 = 0 to 𝑁 do
ˆ 𝑛 ⇐ 𝒙𝑛 /𝑠;
𝝅
end for
End Algorithm 2
customer in the orbit retries to enter the server after an exponentially distributed
time with mean 1/𝜈. We restrict to a class of light-tailed service distribution, i.e.,
there exists a 𝛾 > 0 such that
𝛾 = sup{𝑡 ∈ ℝ ∣ E[𝑒𝑡𝐵 ] < ∞},
(1)
where ℝ denotes the set of real number. Under this assumption, it is easy to prove
that there exists a unique 𝜎 such that (see e.g. Kim et al. (2007) [10])
𝛽(𝜆 − 𝜆𝜎) = 𝜎,
1<𝜎 <1+
𝛾
.
𝜆
Proposition 4 (Theorem 1 in Kim et al. (2007) [10]). Let 𝜋𝑖,𝑛 (𝑖 = 0, 1; 𝑛 ∈ ℤ+ )
denote the probability that there are 𝑛 customers in the orbit and 𝑖 customer in the
server at the steady state. Provided that (1) is satisfied, we have
𝜋0,𝑛 ∼ 𝑐0 𝑛𝑎−1 𝜎 −𝑛 ,
𝜋1,𝑛 ∼ 𝑐1 𝑛𝑎 𝜎 −𝑛 ,
𝑛 → ∞,
where
𝜆
𝜎−1
,
𝜈 −𝜆𝛽 ′ (𝜆 − 𝜆𝜎) − 1
(
)𝑎
(∫ 𝜎 (
) )
1−𝜌 𝜎−1
𝜆 1 − 𝛽(𝜆 − 𝜆𝑧)
𝑎
𝑐0 =
exp
+
𝑑𝑧 ,
Γ(𝑎)
𝜎
𝜈 𝛽(𝜆 − 𝜆𝑧) − 𝑧
𝑧−𝜎
1
𝜈𝑐0
𝑐1 =
,
𝜆𝜎
𝑎=
𝛽 ′ (𝑧) denotes the first derivative of 𝛽(𝑧) and Γ(⋅) denotes the Gamma function.
MULTISERVER RETRIAL QUEUES WITH AFTER-CALL WORK
649
4.2.2. Determination of truncation point. In this section, we derive the truncation
point for our multiserver retrial queue using the asymptotic result in Section 4.2.1.
To this end, we consider an auxiliary conventional M/G/1 retrial queue with the
same retrial rate 𝜈, where the service time is equal to the total of the duration of
a call and that of its associated after-call work in our original multiserver model.
Furthermore, we choose the arrival rate 𝜆 for this M/G/1 retrial queue by 𝜆 =
𝜌/(1/𝜇 + 1/𝜉) in order to guarantee the ergodicity of the single server retrial queue
under the ergodic condition of our multiserver model. It should be noted that the
arrival rate 𝜆 of the M/G/1 retrial queue is different from that of our multiserver
model.
Let 𝐵 denote the service time in our M/G/1 model, i.e., 𝐵 = 𝑋1 + 𝑋2 , where 𝑋1
and 𝑋2 are exponentially distributed random variables with means 1/𝜇 and 1/𝜉,
respectively. Let ℒ(𝑋) represent the LST of a random variable 𝑋. We then have
𝜉
𝜇
,
ℒ(𝑋2 ) =
.
𝜇+𝑠
𝜉+𝑠
Because 𝑋1 and 𝑋2 are independent, we have
𝜇𝜉
𝛽(𝑠) = ℒ(𝐵) =
.
(𝜇 + 𝑠)(𝜉 + 𝑠)
ℒ(𝑋1 ) =
(2)
It is easy to check that 𝐵 is also a light-tailed random variable. Using the LST in
(2) yields
1 − 𝛽(𝜆 − 𝜆𝑥)
𝜆(𝜆 + 𝜇 + 𝜉 − 𝜆𝑥)
𝑥1 + 𝑥2 − 𝑥
= 2 2
=
,
𝛽(𝜆 − 𝜆𝑥) − 𝑥
𝜆 𝑥 − 𝜆𝑥(𝜆 + 𝜇 + 𝜉) + 𝜇𝜉
(𝑥 − 𝑥1 )(𝑥 − 𝑥2 )
(3)
where
√
√
𝜆 + 𝜇 + 𝜉 + (𝜆 + 𝜇 + 𝜉)2 − 4𝜇𝜉
(𝜆 + 𝜇 + 𝜉)2 − 4𝜇𝜉
𝑥1 =
, 𝑥2 =
.
2𝜆
2𝜆
Furthermore, we have
𝑥1 + 𝑥2 − 𝑥
−𝐴
𝐵
=
+
,
(4)
(𝑥 − 𝑥1 )(𝑥 − 𝑥2 )
𝑥 − 𝑥1
𝑥 − 𝑥2
𝜆+𝜇+𝜉−
where
𝑥2
𝑥1
,
𝐵=
.
𝑥2 − 𝑥1
𝑥2 − 𝑥1
It should be noted that 𝐴 > 0 and 𝐵 > 0. We further have
𝜆𝐴
𝑎=
,
𝜎 = 𝑥1 .
𝜈
Under the ergodic condition
(
)
1
1
𝜌=𝜆
+
< 1,
𝜇 𝜉
𝐴=
it is easy to see that 𝑥2 > 𝑥1 > 1. Applying Proposition 4 with an appeal to (3)
and (4) yields
𝜋0,𝑛 ∼ 𝑐0 𝑛𝑎−1 𝑥−𝑛
𝜋1,𝑛 ∼ 𝑐1 𝑛𝑎 𝑥−𝑛
1 ,
1 ,
where
(
)𝑎 (
) 𝜆𝐵
1 − 𝜌 𝑥1 − 1
𝑥2 − 𝑥1 𝜈
𝜈𝑐0
𝑐0 =
,
𝑐1 =
.
Γ(𝑎)
𝑥1
𝑥2 − 1
𝜆𝑥1
It is easy to see that
𝜋0,𝑛 + 𝜋1,𝑛 ∼ 𝜋1,𝑛 ∼ 𝑐1 𝑛𝑎 𝑥−𝑛
1 .
650
TUAN PHUNG-DUC AND KEN’ICHI KAWANISHI
Based on this observation, we propose setting the truncation point 𝑁 for a given
precision 𝜖2 > 0 as follows.
< 𝜖2 }.
𝑁 = inf{𝑛 ∈ ℕ ∣ 𝑐1 𝑛𝑎 𝑥−𝑛
1
(5)
Remark 5. For the truncation
∑∞ point 𝑁 obtained by (5), we expect that the tail
probability of our system 𝑛=𝑁 +1 𝝅 𝑛 1⊤ is also sufficiently small to be disregarded.
Remark 6. For M/M/𝑐/𝑐 retrial queues without after-call work, Neuts and Rao
(1990) [14] propose a method to obtain the truncation point 𝑁 , which can also be
applied to our model. However, because the approach of Neuts and Rao is involved
with the computation of the spectral radius of the rate matrix of a level-independent
QBD process, the computational cost may be large. In contrast, our approach by
(5) does not concern with any matrix and therefore the computational cost is low.
5. Performance measures and numerical examples. In this section, we derive
the blocking probability and the average number of customers in the orbit for our
model. We also derive the stationary distribution for a multiserver queueing system
without retrial. Furthermore, we provide some numerical examples in order to
investigate the influence of the parameters on the performance measures.
5.1. Performance measures. In this section, first we derive some performance
measures for our model in Section 5.1.1. Second, we consider a corresponding loss
model without retrials and derive its performance measures in Section 5.1.2.
5.1.1. Model with retrials. Let 𝑃𝑏 denote the blocking probability that an arriving
customer sees all the call lines being occupied. Also let E[𝐿] denote the average
number of customers in the orbit. We have
𝑐 ∑
∞
𝑐 ∑
𝐾 ∑
∞
∑
∑
𝑃𝑏 =
𝜋𝑖,𝐾,𝑘 ,
E[𝐿] =
𝑘𝜋𝑖,𝑗,𝑘 .
𝑖=0 𝑘=0
𝑖=0 𝑗=0 𝑘=0
Furthermore, let E[𝑆𝑐 ] and E[𝑆𝑎𝑐𝑤 ] denote the average number of servers with a
call and that with an after-call work, respectively, i.e,
E[𝑆𝑐 ] =
𝑐 ∑
𝐾 ∑
∞
∑
𝑖=0 𝑗=0 𝑘=0
min(𝑐 − 𝑖, 𝑗)𝜋𝑖,𝑗,𝑘 ,
E[𝑆𝑎𝑐𝑤 ] =
𝑐 ∑
𝐾 ∑
∞
∑
𝑖𝜋𝑖,𝑗,𝑘 .
𝑖=0 𝑗=0 𝑘=0
Let E[𝑆𝑏𝑢𝑠𝑦 ] denote the average number of busy servers with either a call or an
after-call work, i.e.,
E[𝑆𝑏𝑢𝑠𝑦 ] = E[𝑆𝑐 ] + E[𝑆𝑎𝑐𝑤 ].
It should be noted that in numerical examples 𝑃𝑏 , E[𝐿], E[𝑆𝑐 ], E[𝑆𝑎𝑐𝑤 ] and E[𝑆𝑏𝑢𝑠𝑦 ]
are computed based on {ˆ
𝝅 𝑛 ; 𝑛 = 0, 1, . . . , 𝑁 } instead of {𝝅𝑛 ; 𝑛 ∈ ℤ+ }.
Proposition 5. The following formulae are established by the Little’s law [12].
(
)
𝜆
𝜆
1
1
E[𝑆𝑐 ] = ,
E[𝑆𝑎𝑐𝑤 ] = ,
E[𝑆𝑏𝑢𝑠𝑦 ] = 𝜆
+
.
𝜇
𝜉
𝜇 𝜉
Proof. We consider a new system constituted only by the 𝑐 servers. This system
serves two types of customers, i.e. calls and after-call works. Because customers
in our original system are not lost, i.e. every customer is eventually served and
leaves the system. Therefore, the arrival rates of these two types of customers to
our new system are equal to 𝜆. On the other hand, the average sojourn times of a
call and an after-call work are 1/𝜇 and 1/𝜉, respectively. As a result, the first and
MULTISERVER RETRIAL QUEUES WITH AFTER-CALL WORK
651
the second formulae of Proposition 5 follow from the Little’s law [12] and thus the
third formula immediately follows from the definition.
5.1.2. Model without retrials. Let {(𝐶1 (𝑡), 𝐶2 (𝑡)); 𝑡 ≥ 0} denote a continuous-time
Markov chain on the state space {(𝑖, 𝑗) : 𝑖 = 0, 1, . . . , 𝑐, 𝑗 = 0, 1, . . . , 𝐾}, whose infin(0)
(0)
itesimal generator is given by 𝑸0 +𝑸1 . It is easy to see that {(𝐶1 (𝑡), 𝐶2 (𝑡)); 𝑡 ≥ 0}
is the underlying Markov chain of the corresponding multiserver loss model with
after-call work, i.e., without retrial, where 𝐶1 (𝑡) and 𝐶2 (𝑡) represent the number of
servers handling an after-call work and the number of customers in the queue (i.e.,
holding a call line), respectively. Let
𝑝𝑖,𝑗 = lim Pr[𝐶1 (𝑡) = 𝑖, 𝐶2 (𝑡) = 𝑗],
𝑡→∞
𝒑𝑗 = (𝑝0,𝑗 , 𝑝1,𝑗 , . . . , 𝑝𝑐,𝑗 ),
𝑖 = 0, 1, . . . , 𝑐,
𝑗 = 0, 1, . . . , 𝐾,
𝑗 = 0, 1, . . . , 𝐾,
𝒑 = (𝒑0 , 𝒑1 , . . . , 𝒑𝐾 ).
The stationary distribution 𝒑 of this model is determined by
(
)
(0)
(0)
𝒑 𝑸0 + 𝑸1
= 0,
𝒑1⊤ = 1.
Let 𝑃𝑏∘ denote the blocking probability for the model with after-call work but without retrial. We then have
𝑐
∑
𝑃𝑏∘ =
𝑝𝑖,𝐾 .
𝑖=0
5.2. Numerical results. In this section, first we present the validation of our algorithm in Section 5.2.1. In particular, we compare the results calculated by the
algorithm and the explicit formulae obtained by the Little’s law. Second, we investigate the impact of the parameters on the performance of the system in Section 5.2.2.
In all the numerical results, we use 𝜖1 = 10−10 and employ 𝑘𝑙 = 2𝑙+1 − 1 (𝑙 ∈ ℤ+ )
for Algorithm 1 and 𝜖2 = 10−6 for the determination of the truncation point in
Algorithm 2.
5.2.1. Validation of the truncation point and Algorithms 1 and 2. Tables 3, 4 and
5 represent numerical results of E[𝑆𝑐 ], E[𝑆𝑎𝑐𝑤 ] and E[𝑆𝑏𝑢𝑠𝑦 ] for the three parameter
sets: (𝜇, 𝜉) = (1/10, 1/2), (1/6, 1/6) and (1/2, 1/10) while 𝜆 = 1, 𝜈 = 1 and 𝐾 = 20.
In this parameter setting, the total average duration of a call and its after-call work
is 12 minutes and the average call arrival interval is 1 minute. We consider three
different cases, where average durations of a call and an after-call work are (10,2),
(6,6) and (2,10). We think that these parameters are reasonable in some real world
call centers. In Table 3, the number of servers 𝑐 is changed from 16 to 25. These
numbers are considered to be suitable for small-scale call centers. We observe that
the numerical results are consistent with the explicit ones. This suggests that we
have chosen a large enough truncation point 𝑁 and that our algorithm is numerically
stable and is accurate.
5.2.2. Blocking probability and average number of calls in the orbit. First, we compare 𝑃𝑏 and 𝑃𝑏∘ under the same parameters: 𝑐, 𝐾, 𝜆, 𝜇 and 𝜉. Other parameter
settings are the same as those of Section 5.2.1. It should be noted that in the
loss model with after-call work, the arrival rate 𝜆 is the same as that of primary
customers, i.e., retrial customers are not taken into account. In Table 6, we show
652
TUAN PHUNG-DUC AND KEN’ICHI KAWANISHI
Table 3. E[𝑆𝑐 ], E[𝑆𝑎𝑐𝑤 ] and E[𝑆𝑏𝑢𝑠𝑦 ] with 𝜇 = 1/10, 𝜉 = 1/2.
𝑐
16
17
18
19
20
21
22
23
24
25
E[𝑆𝑐 ]
1.000000×101
1.000000×101
1.000000×101
1.000000×101
1.000000×101
1.000000×101
1.000000×101
9.999999×100
9.999999×100
9.999999×100
E[𝑆𝑎𝑐𝑤 ]
2.000000×100
2.000000×100
2.000000×100
2.000000×100
2.000000×100
2.000000×100
2.000000×100
2.000000×100
2.000000×100
2.000000×100
E[𝑆𝑏𝑢𝑠𝑦 ]
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
Table 4. E[𝑆𝑐 ], E[𝑆𝑎𝑐𝑤 ] and E[𝑆𝑏𝑢𝑠𝑦 ] with 𝜇 = 1/6, 𝜉 = 1/6.
𝑐
16
17
18
19
20
21
22
23
24
25
E[𝑆𝑐 ]
6.000000×100
6.000000×100
6.000000×100
6.000000×100
6.000000×100
6.000000×100
6.000000×100
6.000000×100
6.000000×100
6.000000×100
E[𝑆𝑎𝑐𝑤 ]
6.000001×100
6.000001×100
6.000000×100
6.000000×100
6.000000×100
6.000000×100
6.000000×100
6.000000×100
6.000000×100
6.000000×100
E[𝑆𝑏𝑢𝑠𝑦 ]
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
Table 5. E[𝑆𝑐 ], E[𝑆𝑎𝑐𝑤 ] and E[𝑆𝑏𝑢𝑠𝑦 ] with 𝜇 = 1/2, 𝜉 = 1/10.
𝑐
16
17
18
19
20
21
22
23
24
25
E[𝑆𝑐 ]
2.000000×100
2.000000×100
2.000000×100
2.000000×100
2.000000×100
2.000000×100
2.000000×100
2.000000×100
2.000000×100
2.000000×100
E[𝑆𝑎𝑐𝑤 ]
1.000000×101
1.000000×101
1.000000×101
1.000000×101
1.000000×101
1.000000×101
1.000000×101
1.000000×101
1.000000×101
1.000000×101
E[𝑆𝑏𝑢𝑠𝑦 ]
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
1.200000×101
numerical examples of 𝑃𝑏 and 𝑃𝑏∘ . We observe that 𝑃𝑏 is larger than 𝑃𝑏∘ . This indicates that retrial customers deteriorate the blocking probability. It is also observed
that both 𝑃𝑏 and 𝑃𝑏∘ increase as the average time in the after-call work decreases.
Second, we show the blocking probability and the average number of customers
in the orbit in Table 7. In Table 7, we investigate the impact of 𝑐 and 𝜈 on the
blocking probability and the average number of retrial customers, while 𝐾 = 70, 𝜆 =
1/6, 𝜇 = 1/280 and 𝜉 = 1/20. In this parameter setting, the total average duration
of a call and its after-call work is 300 seconds (5 minutes) while the average arrival
interval is 6 seconds. In Table 7, the number of servers varies from 60 to 80 which
MULTISERVER RETRIAL QUEUES WITH AFTER-CALL WORK
653
Table 6. 𝑃𝑏 and 𝑃𝑏∘ with 𝐾 = 20, 𝜆 = 1, 𝜈 = 1.
𝑐
16
17
18
19
20
21
22
23
24
25
(𝜇, 𝜉) = (1/10, 1/2)
𝑃𝑏
𝑃𝑏∘
1.9401×10−2
6.7390×10−3
1.1091×10−2
4.5719×10−3
7.1149×10−3
3.3476×10−3
5.0446×10−3
2.6356×10−3
3.9080×10−3
2.2214×10−3
3.3090×10−3
2.0054×10−3
3.0284×10−3
1.9124×10−3
2.9150×10−3
1.8804×10−3
2.8757×10−3
1.8715×10−3
2.8639×10−3
1.8695×10−3
(𝜇, 𝜉) = (1/6, 1/6)
𝑃𝑏
𝑃𝑏∘
1.9899×10−3 7.3192×10−4
6.5601×10−4 2.9057×10−4
2.4567×10−4 1.2543×10−4
1.0353×10−4 5.9169×10−5
4.8857×10−5 3.0614×10−5
2.5768×10−5 1.7434×10−5
1.5179×10−5 1.0954×10−5
9.9734×10−6 7.5962×10−6
7.2768×10−6 5.7913×10−6
5.8367×10−6 4.8058×10−6
(𝜇, 𝜉) = (1/2, 1/10)
𝑃𝑏
𝑃𝑏∘
4.9524×10−4
1.6868×10−4
9.6395×10−5
3.9299×10−5
1.9885×10−5
9.2899×10−6
4.2929×10−6
2.2314×10−6
9.6032×10−7
5.4375×10−7
2.2085×10−7
1.3411×10−7
5.1888×10−8
3.3395×10−8
1.2394×10−8
8.3770×10−9
2.9988×10−9
2.1132×10−9
7.3303×10−10
5.3549×10−10
Table 7. 𝑃𝑏 and E[𝐿] with 𝐾 = 70, 𝜆 = 1/6, 𝜇 = 1/280, 𝜉 = 1/20.
𝑐
60
62
64
66
68
70
72
74
76
78
80
𝜌
0.8333
0.8065
0.7813
0.7576
0.7353
0.7143
0.6949
0.6798
0.6712
0.6678
0.6669
𝜈=1
𝑃𝑏
E[𝐿]
−3
7.924×10
3.967×10−2
−3
4.418×10
1.859×10−2
2.726×10−3
9.911×10−3
1.845×10−3
5.915×10−3
1.359×10−3
3.903×10−3
1.084×10−3
2.820×10−3
9.342×10−4
2.242×10−3
8.724×10−4
2.001×10−3
8.555×10−4
1.934×10−3
8.525×10−4
1.922×10−3
8.521×10−4
1.921×10−3
𝜈 = 1/10
𝑃𝑏
E[𝐿]
6.061×10−3 4.315×10−2
−3
3.329×10
2.072×10−2
2.031×10−3 1.133×10−2
1.364×10−3 6.938×10−3
9.992×10−4 4.700×10−3
7.936×10−4 3.488×10−3
6.858×10−4 2.857×10−3
6.451×10−4 2.616×10−3
6.354×10−4 2.557×10−3
6.340×10−4 2.547×10−3
6.338×10−4 2.546×10−3
𝜈 = 1/100
𝑃𝑏
E[𝐿]
2.979×10−3
6.782×10−2
−3
1.671×10
3.614×10−2
1.048×10−3
2.183×10−2
7.267×10−4
1.470×10−2
5.513×10−4
1.090×10−2
4.546×10−4
8.836×10−3
4.082×10−4
7.844×10−3
3.939×10−4
7.536×10−3
3.915×10−4
7.483×10−3
3.912×10−4
7.477×10−3
3.912×10−4
7.477×10−3
is considered to be the size of medium-scale call centers. We observe that the
blocking probability and the average number of customers in the orbit decrease
with 𝑐, as expected. We also observe that the average number of retrial customers
E[𝐿] increases with the retrial rate 𝜈.
6. Conclusion and future work. In this paper, we have proposed a Markovian
multiserver retrial queue with after-call work. We have formulated the queueing
model by a level-dependent QBD process and have derived a sufficient condition
for the ergodicity using the approach by Diamond and Alfa (1998) [2]. We have
obtained the stationary distribution of the level-dependent QBD process by a directtruncation method for which the truncation point is simply determined using an
asymptotic analysis of a conventional M/G/1 retrial queue. Because the truncation
method does not require operations with respect to matrices, it is easy to implement
and is efficient. We have obtained an approximation to the stationary distribution
using the algorithm developed by Phung-Duc et al. (2010b) [16]. Some numerical
examples have been presented to demonstrate the performance of the queueing
system. For future work, we plan to take into account the impatience of customers
in the queueing model and investigate the ergodic condition. Furthermore, we also
pay attention to the derivation of the waiting time distribution.
Acknowledgments. The authors would like to thank the two anonymous referees
for constructive comments which greatly improved the presentation of the paper.
Tuan Phung-Duc was supported in part by Japan Society for the Promotion of
Science, Grant-in-Aid for JSPS Fellows (No. 22⋅470).
654
TUAN PHUNG-DUC AND KEN’ICHI KAWANISHI
Appendix A. Proof of Proposition 1.
Lemma A.1 (Tweedie (1975) [18] or Statement 8, p. 97 in Falin and Templeton
(1997) [5]). Let {Ξ(𝑡); 𝑡 ≥ 0} denote a Markov process with discrete
state space 𝒮
∑
and infinitesimal transition rates 𝑞𝑠,𝑝 ’s (𝑠, 𝑝 ∈ 𝒮) such that
𝑞
𝑝∈𝒮 𝑠,𝑝 = 0. We
assume that the statements below are true.
1. There exists a lower bounded function 𝜑(𝑠) for 𝑠 ∈ 𝒮.
2. There exists a positive number 𝜖 such that 𝑦𝑠 < ∞ (∀𝑠 ∈ 𝒮) and
𝑦𝑠 ≤ −𝜖,
for all 𝑠 ∈ 𝒮 except a finite number of states, where
∑
𝑦𝑠 =
𝑞𝑠,𝑝 𝜑(𝑝).
𝑝∈𝒮
Then {Ξ(𝑡); 𝑡 ≥ 0} is regular and ergodic.
Proof. The proof mostly follows that of Proposition 1 in Diamond and Alfa (1998) [2].
We consider an embedded Markov chain at each jump epochs of the irreducible finite
continuous-time Markov chain with the infinitesimal generator 𝑨𝐾 = 𝑨0 + 𝑨𝐾,1 +
𝑨𝐾,2 . Then, we can construct a discrete-time homogeneous (level-independent)
∗
∗
−1
−1
QBD with blocks 𝑨∗0 = Δ−1
𝐾 𝑨0 , 𝑨𝐾,1 = 𝑰 + Δ𝐾 𝑨𝐾,1 , and 𝑨𝐾,2 = Δ𝐾 𝑨𝐾,2 for
upper diagonal, diagonal, and lower diagonal matrices, respectively, where Δ𝐾 =
−diag(𝑨𝐾,1 ). It then follows that 𝑨∗𝐾 = 𝑨∗0 + 𝑨∗𝐾,1 + 𝑨∗𝐾,2 is stochastic and irreducible, and its stationary distribution 𝒔∗𝐾 is given by 𝒔∗𝐾 = (𝒔𝐾 Δ𝐾 1⊤ )−1 𝒔𝐾 Δ𝐾 .
It follows from 𝒔𝐾 𝑨0 1⊤ < 𝒔𝐾 𝑨𝐾,2 1⊤ that 𝒔∗𝐾 𝑨∗0 1⊤ < 𝒔∗𝐾 𝑨∗𝐾,2 1⊤ , which implies
the ergodicity of the discrete-time homogeneous QBD process.
We denote by 𝑨∗𝐾 (𝑧) = 𝑨∗0 + 𝑧𝑨∗𝐾,1 + 𝑧 2 𝑨∗𝐾,2 and by 𝜒(𝑧) = sp(𝑨∗𝐾 (𝑧)) the
spectral radius of 𝑨∗𝐾 (𝑧). Let 𝑹 denote the minimal nonnegative solution to the
matrix-quadratic equation:
𝑨∗0 + 𝑹𝑨∗𝐾,1 + 𝑹2 𝑨∗𝐾,2 = 𝑹.
If we denote by 𝜂 = sp(𝑹) the spectral radius of 𝑹, then 𝜂 < 1. By using the
argument in the proof of Lemma 1.3.4 in Neuts (1981) [13], we have 𝜒(𝑧) < 𝑧 for
𝜂 < 𝑧 < 1. Let 𝒓 𝐾 (𝑧)⊤ denote the right eigenvector corresponding to 𝜒(𝑧). We can
choose 𝒓 𝐾 (𝑧)⊤ > 0⊤ . We have 𝑨∗𝐾 𝒓 𝐾 (𝑧)⊤ = 𝜒(𝑧)𝒓𝐾 (𝑧)⊤ < 𝑧𝒓𝐾 (𝑧)⊤ . Therefore,
𝑨𝐾 (𝑧)𝒓𝐾 (𝑧)⊤ < 0⊤ ,
for 𝜂 < 𝑧 < 1, where 𝑨𝐾 (𝑧) = 𝑨0 + 𝑧𝑨𝐾,1 + 𝑧 2 𝑨𝐾,2 .
We choose 𝑧 such that 𝜂 < 𝑧 < 1 and define a column vector 𝝋⊤
𝑗,𝑘 of size 𝑐 + 1 by
−𝑘
𝝋⊤
(𝑎1⊤ + 𝑧 𝐾−𝑗 𝒓 𝐾 (𝑧)⊤ ),
𝑗,𝑘 = 𝑧
⊤
for 𝑗 = 0, 1, . . . , 𝐾 and 𝑘 ∈ ℤ+ with 0 < 𝑎 < 1, and vectors 𝝋⊤
𝑘 and 𝝋 by
⎡ ⊤ ⎤
⎡ ⊤ ⎤
𝝋0,𝑘
𝝋0
⎢ 𝝋⊤
⎥
⎢ 1,𝑘 ⎥
⎢ 𝝋⊤
⎥
⊤
⊤
𝝋𝑘 = ⎢ . ⎥ ,
𝝋 = ⎣ 1 ⎦.
⎣ .. ⎦
..
.
𝝋⊤
𝐾,𝑘
It is clear that each element of 𝝋⊤
𝑗,𝑘 is lower bounded. In order to show the
ergodicity, it is sufficient to check that 𝑄𝝋⊤ ≤ −𝜖1⊤ holds for some positive number
MULTISERVER RETRIAL QUEUES WITH AFTER-CALL WORK
655
𝜖 except a finite number of states. Indeed, for 𝑘 ∈ ℕ, we have
(𝑘)
(𝑘)
(𝑘)
⊤
⊤
⊤
⊤
𝒚⊤
𝑗,𝑘 =(𝑸𝝋 )(𝑗,𝑘) = (𝑸2 𝝋𝑘−1 + 𝑸1 𝝋𝑘 + 𝑸0 𝝋𝑘+1 )𝑗 .
By a direct calculation, we can show that for 𝑗 = 0, 1, . . . , 𝐾 − 1,
(
)
−(𝑘+1)
𝒚⊤
−𝑎𝑘𝜈𝑧(1 − 𝑧)1⊤ + 𝑧 𝐾−𝑗 𝑨𝑗 (𝑧)𝒓𝐾 (𝑧)⊤ ,
𝑗,𝑘 = 𝑧
where 𝑨𝑗 (𝑧) = 𝑨0 + 𝑨𝑗,1 𝑧 + (1 − 𝛿0,𝑗 )𝑨𝑗,2 𝑧 2 and 𝛿𝑖,𝑗 denotes the Kronecker delta
defined by 𝛿𝑖,𝑗 = 1 if 𝑖 = 𝑗 and 0 otherwise. For 𝑗 = 𝐾, we have
(
)
−(𝑘+1)
𝒚⊤
𝑎(1 − 𝑧)𝑨0 1⊤ + 𝑨𝐾 (𝑧)𝒓𝐾 (𝑧)⊤ .
𝐾,𝑘 = 𝑧
Because 𝑨𝐾 (𝑧)𝒓 𝐾 (𝑧)⊤ < 0⊤ and (1 − 𝑧)𝑨0 1⊤ > 0⊤ , we can select 0 < 𝑎 < 1 such
⊤
⊤
that 𝒚 ⊤
𝑗,𝑘 ≤ −𝜖1 for 𝑗 = 𝐾. Since (𝒚 𝑗,𝑘 )𝑖 → −∞ as 𝑘 → ∞ for 𝑖 = 0, 1, . . . , 𝑐 and
⊤
𝑗 = 0, 1, . . . , 𝐾 − 1, there exists an integer 𝑘0 such that 𝒚 ⊤
𝑗,𝑘 ≤ −𝜖1 for all 𝑘 > 𝑘0 .
Therefore, {𝑋(𝑡); 𝑡 ≥ 0} is ergodic according to Lemma A.1.
REFERENCES
[1] J. R. Artalejo and M. Pozo, Numerical calculation of the stationary distribution of the main
multiserver retrial queue, Annals of Operations Research, 116 (2002), 41–56.
[2] J. E. Diamond and A. S. Alfa, The MAP/PH/1 retrial queue, Stochastic Models, 14 (1998),
1151–1177.
[3] J. R. Artalejo and V. Pla, On the impact of customer balking, impatience and retrials in
telecommunication systems, Computers & Mathematics with Applications, 57 (2009), 217–
229.
[4] L. Bright and G. P. Taylor, Calculating the equilibrium distribution in level dependent
quasi-birth-and-death processes, Stochastic Models, 11 (1995), 497–525.
[5] G. I. Falin and J. G. C. Templeton, “Retrial Queues,” Chapman & Hall, London, 1997.
[6] M. J. Fischer, D. A. Garbin and A. Gharakhanian, Performance modeling of distributed
automatic call distribution systems, Telecommunications Systems, 9 (1998), 133–152.
[7] N. Gans, G. Koole and A. Mandelbaum, Telephone call centers: tutorial, review, and research
prospects, Manufacturing & Service Operations Management, 5 (2003), 79–141.
[8] W. M. Jolley and R. J. Harris , Analysis of post-call activity in queueing systems, Proceedings
of the 9th International Teletraffic Congress, Torremolinos, (1979), 1–9.
[9] K. Kawanishi, On the counting process for a class of Markovian arrival processes with an
application to a queueing system, Queueing Systems, 49 (2005), 93–122.
[10] J. Kim, B. Kim and S.-S. Ko, Tail asymptotics for the queue size distribution in an M/G/1
retrial queue, Journal of Applied Probability, 44 (2007), 1111–1118.
[11] G. Koole and A. Mandelbaum, Queueing models of call centers: an introduction, Annals of
Operations Research, 113 (2002), 41–59.
[12] J. D. C. Little, A proof for the queuing formula: 𝐿 = 𝜆𝑊 , Operations Research, 9 (1961),
383–387.
[13] M. F. Neuts, “Matrix-Geometric Solutions in Stochastic Models: An Algorithmic Approach,”
Johns Hopkins University Press, Baltimore, MD, 1981.
[14] M. F. Neuts and B. M. Rao, Numerical investigation of a multiserver retrial model , Queueing
Systems, 7 (1990), 169–190.
[15] T. Phung-Duc, H. Masuyama, S. Kasahara and Y. Takahashi, State-dependent M/M/𝑐/𝑐 + 𝑟
retrial queues with Bernoulli abandonment, Journal of Industrial and Management Optimization, 6 (2010a), 517–540.
[16] T. Phung-Duc, H. Masuyama, S. Kasahara and Y. Takahashi, A simple algorithm for the rate
matrices of level-dependent QBD processes, Proceedings of the 5th International Conference
on Queueing Theory and Network Applications, (2010b), 46–52.
656
TUAN PHUNG-DUC AND KEN’ICHI KAWANISHI
[17] T. Phung-Duc, H. Masuyama, S. Kasahara and Y. Takahashi, A matrix continued fraction
approach to multi-server retrial queues, to appear in Annals of Operations Research, (2011).
[18] R. L. Tweedie, Sufficient conditions for regularity, recurrence and ergodicity and Markov
processes, Mathematical Proceedings of the Cambridge Philosophical Society, 78 (1975), 125–
136.
Received June 2011; revised August 2011.
E-mail address: tuan@sys.i.kyoto-u.ac.jp
E-mail address: kawanisi@cs.gunma-u.ac.jp