Hydrodynamic properties of two vertical truncated cylinders in waves
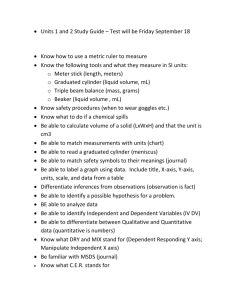
Ocean Engineering 32 (2005) 241–271 www.elsevier.com/locate/oceaneng Hydrodynamic properties of two vertical truncated cylinders in waves Y.H. Zhenga,*, Y.M. Shenb, Y.G. Youa, B.J. Wua, Liu Ronga a Guangzhou Institute of Energy Conversion, Chinese Academy of Sciences, Guangzhou 510640, People’s Republic of China b State Key Laboratory of Coastal and Offshore Engineering, Dalian University of Technology, Dalian 116023, People’s Republic of China Received 30 April 2004; accepted 23 September 2004 Available online 2 December 2004 Abstract The radiation and diffraction boundary value problem arising from the interaction of linear water waves with two vertical truncated cylinders is investigated by use of the method of separation of variables and the method of matched eigenfunction expansion. Analytical expressions for the radiated and diffracted potentials are obtained as infinite series of orthogonal functions. The unknown coefficients in the obtained expressions are determined by use of the matched eigenfunction expansion method. To verify the obtained expressions, the Green’s second identity and the symmetry of the matrices for the added masses and damping coefficients are used. The results show that the analytical expressions presented in this paper are correct. By use of the present analytical solution, the hydrodynamic coefficients and wave forces for some specific cases are calculated and the hydrodynamic effects of the cylinders’ radii on the hydrodynamic properties of the cylinders are investigated which will supply some useful information for the design of this kind of system. q 2004 Elsevier Ltd. All rights reserved. Keywords: Hydrodynamic property; Radiation; Diffraction; Water waves; Analytical method; Two vertical truncated cylinders * Corresponding author. Tel.: C86 20 87057612; fax: C86 20 87057597. E-mail address: zhengyh@ms.giec.ac.cn (Y.H. Zheng). 0029-8018/$ - see front matter q 2004 Elsevier Ltd. All rights reserved. doi:10.1016/j.oceaneng.2004.09.002 242 Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 1. Introduction It is well known that floating structures, such as ocean platforms, breakwaters, and wave energy devices, are often used in ocean engineering. The hydrodynamic properties, of which most important are the hydrodynamic coefficients, wave excitation forces, and transmission and reflection coefficients, are of major interest of designers and many researches have been carried out and lots of results have been obtained. To analyze the hydrodynamic properties of floating structures, various methods, such as the Boundary Element Method (BEM), the Finite Element Method (FEM), and some analytical methods, can be used. Of all existing methods the most efficient are analytical methods which are only applicable to some particular problems, for example, the problem considered in the present paper. Numerical methods like BEM and FEM are suitable for general problems, but the computational procedure is complex, the efficiency and the accuracy are relatively lower compared with those of analytical methods. So the best methods for some particular problems are analytical ones. Up to now, many scholars have applied various analytical methods, such as the matched eigenfunction expansion, the multipole expansion, and the multiple scattering technique, to the study of hydrodynamic properties of floating structures. The often-used analytical methods are the matched eigenfunction expansion method. The following are some examples of application of these analytical methods to hydrodynamics of vertical floating circular structures. By using the eigenfunction method, Black et al. (1971), Yeung (1981), Sabuncu and Calisal (1981), Calisal and Sabuncu (1984, 1993), Williams et al. (2000) and Bhatta and Rahman (2003) studied the radiation and/or diffraction by a single floating circular cylinder and obtained theoretical results of hydrodynamic coefficients and/or wave forces. Berggren and Johansson (1992) and Eidsmoen (1995) investigated the heave radiation problem of a two-body axisymmetric system and calculated the heave added masses and damping coefficients. Wu et al. (2004) explored the diffraction and radiation problem for a cylinder over a caisson in water of finite depth and presented the calculated results of hydrodynamic coefficients, wave forces and hydrodynamic effect of the caisson on the hydrodynamics of the cylinder. Yeung and Sphaier (1989) determined the radiation and diffraction properties of a floating vertical cylinder of finite draft in a channel. Mciver and Bennett (1993) and Linton and Evans (1993) studied hydrodynamic characteristics of a body in a channel by use of the multipole expansion. Simon (1982), Kagemoto and Yue (1986), Williams and Demirbilek (1988), Williams and Abul-Azm (1989) and Williams and Rangappa (1994) investigated the scattering and/or radiation problems of horizontally arranged cylinder arrays by application of the multiple scattering technique and plane-wave approximation or modified plane-wave technique. In this paper, we consider the radiation and diffraction problem of a system consisting of two coaxial cylinders arranged vertically. The problem has practical engineering background, and part of which, namely cylinders in heave, was studied by Berggren and Johansson (1992) and Eidsmoen (1995). They did not consider the sway and roll motions and the scattering of water waves though Eidsmoen (1995) obtained the vertical force on the cylinders by use of the general Haskind’s theorem. The information about the sway and roll motions of the cylinders and wave scattering may be important for designers, so we study the radiation and diffraction problem here. The method used here is the matched Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 243 eigenfunction expansion which has been used by many investigators listed above. Analytical expressions for the radiated and diffracted potentials are obtained. The hydrodynamic coefficients and wave forces are calculated and the hydrodynamic effects of the cylinders’ radii on the hydrodynamic properties are investigated. 2. Problem formulation and mathematical model Here the diffraction and radiation including heave, sway and roll of linear water waves by a system consisting of a floating circular cylinder and a submerged circular cylinder will be studied. The two cylinders are coaxial with the same radius. The geometry of the system and the arrangement of the right-hand Cartesian coordinate system Oxyz and the cylindrical coordinate system Orzq are shown in Fig. 1. The origin of the coordinate system is at the undisturbed water surface with the positive z pointing upwardly and the positive x directing to the right. The floating cylinder, which is called hereafter cylinder 1, occupies the space defined by r%R, 0%q%2p, Kd1%z, and the submerged cylinder called as cylinder 2 hereafter occupies the space with r%R, 0%q%2p and Ke2%z%Ke1. As usual we assume that the fluid is incompressible, inviscid and periodic, and the motion of the fluid is irrotational. There exists a velocity potential fðr; q; z; tÞZ Re½Fðr; q; zÞeKiut , where Re[ ] denotes the real part of the complex expression, u is the wave angular frequency, t is the time and F is a time-independent spatial velocity potential which satisfies the following three-dimensional Laplace equation v2 F 1 v vF 1 v2 F r C Z0 (1) C 2 2 r vr vr vz r vq2 Fig. 1. Schematic of geometry. 244 Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 For linear water waves considered here, it is customary not to solve F directly, but make the following decomposition if we consider only heave, sway and roll modes of radiation F Z FI C FD C 2 X 3 X FðJ;LÞ R (2) JZ1 LZ1 where FI is the incident wave potential; FD is the diffracted potential; FðJ;LÞ is the radiated R potential due to the motion of the cylinders. Here LZ1 stands for the heave, 2 for sway and 3 for roll. JZ1,2 represents cylinder 1 and cylinder 2, respectively. In the following sections, L always ranges from 1 to 3 and J always ranges from 1 to 2 if they are not specified particularly. The solution of F is equivalent to the solving of FD and FðJ;LÞ as FI is generally R prescribed beforehand. For linear water waves of amplitude A and angular frequency u propagating along the positive x direction in water of depth h1, the time-independent incident wave potential may be expressed by N igA cosh½kðz C h1 Þ X mm Jm ðkrÞcosðmqÞ (3) u coshðkh1 Þ mZ0 pffiffiffiffiffiffi where iZ K1; g is the gravitational acceleration; k is the wave number, which is determined by the dispersion relation k tanh(kh1)Zu2/g; Jm( ) is the Bessel function of order m; mm is a coefficient given by ( 1 m Z0 mm Z 2im mO 0 FI Z K 2.1. Mathematical model for radiated potentials If the complex amplitudes of heave, sway and roll of cylinder J are assumed as AðJ;1Þ R , ðJ;LÞ and AðJ;3Þ can be expressed as R , respectively, the radiated potential FR ( ðJ;1Þ L Z1 KiuAðJ;1Þ R 4R ðr; zÞ ðJ;LÞ FR Z (4) ðJ;LÞ KiuAðJ;LÞ R 4R ðr; zÞcos q L Z 2; 3 AðJ;2Þ R is a spatial quantity independent of q. For convenience, Eq. (4) can be where 4ðJ;LÞ R expressed in a general form (LZ1,2,3) ðJ;LÞ FðJ;LÞ Z KiuAðJ;LÞ R R 4R ðr; zÞcos½ð1 K d1;L Þq (5) where ( dj;L Z 1 LZj 0 L sj : Substitution of Eq. (5) into Eq. (1) gives the following general partial differential equation (LZ1,2,3) Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 " # ð1 K d1;L Þ2 4ðJ;LÞ v2 4ðJ;LÞ 1 v v4ðJ;LÞ R R R r C Z0 K 2 r vr vr vz r2 245 (6) To obtain the unique solution to Eq. (6), it is necessary to specify the following boundary conditions: 1. The free surface boundary condition v4ðJ;LÞ u2 R K 4ðJ;LÞ Z0 vz g R ðz Z 0; rO RÞ (7) 2. The sea bed boundary condition v4ðJ;LÞ R Z0 vz ðz Z Kh1 Þ (8) 3. The body surface conditions v4ðJ;LÞ R Z dJ;1 ðd1;L K rd3;L Þ ðz Z Kd1 ; r% RÞ vz (9) v4ðJ;LÞ R Z dJ;2 ðd1;L K rd3;L Þ ðz Z Ke1 ; r% RÞ vz (10) v4ðJ;LÞ R Z dJ;2 ðd1;L K rd3;L Þ ðz Z Ke2 ; r% RÞ vz (11) v4ðJ;LÞ R Z dJ;1 ½d2;L C ðz K z0 Þd3;L ðKd1 % z% 0; r Z RÞ vr (12) v4ðJ;LÞ R Z dJ;2 ½d2;L C ðz K z0 Þd3;L ðKe2 % z%Ke1 ; r Z RÞ vr (13) 4. The radiation condition " # pffiffi v4ðJ;LÞ ðJ;LÞ R lim r K ik4R Z 0 r/N r/N vr (14) 246 Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 It should be noted that (0,0,z0) is assumed to be the center of rotation in order to specify the body surface boundary condition of roll motion. 2.2. Mathematical model for the diffracted potential The governing equation and the corresponding boundary conditions for the diffracted potential are expressed as follows v2 FD 1 v vFD 1 v2 F D r C Z0 C r vr vr r 2 vq2 vz2 (15) vFD u2 K FD Z 0 ðz Z 0; rO RÞ vz g (16) vFD Z0 vz (17) ðz Z Kh1 Þ vFD vF ZK I vn vn on S1 and S2 pffiffi vFD K ikFD Z 0 lim r r/N vr (18) r/N (19) where n is the outward normal from the fluid; S1 and S2 are the submerged surfaces of cylinders 1 and 2, respectively. 3. Solution method To obtain the expressions for the radiated and diffracted potentials, we divide the fluid domain into three subdomains I, II and III as shown in Fig. 1. Here the radiated potentials ðJ;LÞ ðJ;LÞ in the three subdomains are denoted by 4ðJ;LÞ R1 , 4R2 and 4R3 , and the diffracted potentials are expressed by FD1, FD2 and FD3, respectively. The method of separation of variables is applied in each subdomain to obtain the expressions for the radiated and diffracted potentials with unknown coefficients. The unknown coefficients are then solved by use of the matched eigenfunction expansion method. 3.1. Expressions for the radiated potentials in three subdomains Application of the method of separation of variables may give the analytical expressions for the radiated potentials in regions I, II and III as follows. Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 247 3.1.1. Region I 4ðJ;LÞ R1 Z N X AðJ;LÞ cos½ln ðz C h1 Þ n nZ1 R1Kd1;L ðln rÞ R1Kd1;L ðln RÞ (20) where the eigenvalues are given by l1 Z Kik; k is the wave number; k tanhðkh1 Þ Z u2 =g ln tanðln h1 Þ Z Ku2 =g nZ1 n Z 2; 3; . (21) (22) and the radial function R1Kd1;L is given by ( ð1Þ H1Kd1;L ðkrÞ n Z 1 R1Kd1;L ðln rÞ Z K1Kd1;L ðln rÞ nO 1 (23) ð1Þ and K1Kd1;L are the first kind Hankel function and the second kind modified where H1Kd 1;L Bessel function of order 1Kd1,L, respectively. 3.1.2. Region II ðJ;LÞ ðJ;LÞ 1Kd1;L 4ðJ;LÞ r C R2 Z 4R2P C B1 N X nZ2 BðJ;LÞ cos½bn ðz C e1 Þ n I1Kd1;L ðbn rÞ I1Kd1;L ðbn RÞ (24) where I1Kd1;L is the first kind modified Bessel function of order 1Kd1,L; 4ðJ;LÞ R2P and bn are the particular solution and eigenvalue of the radiation mode L of cylinder J in region II, whose expressions are given by 8 ðz C e1 Þ2 K r 2 =2 ðz C d1 Þ2 K r 2 =2 > > d K dJ;2 LZ1 > J;1 > > 2h2 2h2 < 0 LZ2 (25) 4ðJ;LÞ R2P Z > > 2 3 2 3 > ðz C e1 Þ r K r =4 ðz C d1 Þ r K r =4 > > :K dJ;1 C dJ;2 L Z 3 2h2 2h2 bn Z ðn K 1Þp=h2 (26) 3.1.3. Region III ðJ;LÞ ðJ;LÞ 1Kd1;L r C 4ðJ;LÞ R3 Z 4R3P C C1 N X nZ2 CnðJ;LÞ cos½gn ðz C h1 Þ I1Kd1;L ðgn rÞ I1Kd1;L ðgn RÞ (27) where 4ðJ;LÞ R3P and gn are the particular solution and eigenvalue of the radiation mode L of cylinder J in region III and the expressions for them are 248 Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 8 ðz C h1 Þ2 K r 2 =2 > > dJ;2 > > > 2h3 < 0 4ðJ;LÞ R3P Z > > > ðz C h1 Þ2 r K r 3 =4 > > :K dJ;2 2h3 L Z1 L Z2 (28) L Z3 gn Z ðn K 1Þp=h3 (29) , BðJ;LÞ and CnðJ;LÞ in Eqs. (20), (24) and (27) are unknown and will be The coefficients AðJ;LÞ n n determined in Section 3.3. 3.2. Expressions for the diffracted potentials in three subdomains Similarly, applying the method of separation of variables to the diffraction problem satisfying Eqs. (15)–(19), one can easily derive the expressions for the diffracted potentials in regions I, II and III as follows, respectively. FD1 Z N X N X Am;n cos½ln ðz C h1 Þ mZ0 nZ1 FD2 Z KFI C N X ( mZ0 FD3 Z KFI C N X mZ0 Rm ðln rÞ cosðmqÞ Rm ðln RÞ (30) ) Im ðbn rÞ Bm;1 r C Bm;n cos½bn ðz C e1 Þ cosðmqÞ Im ðbn RÞ nZ2 (31) ) Im ðgn rÞ cos½gn ðz C h1 Þ cosðmqÞ Im ðgn RÞ (32) m N X m N X ( Cm;1 r C Cm;n nZ2 where Am,n, Bm,n and Cm,n are the coefficients to be solved in Section 3.3; ln, bn and gn are defined by Eqs. (21), (22), (26) and (29). 3.3. Method for the unknown coefficients The expressions for the radiated and diffracted potentials given in Sections 3.1 and 3.2 satisfy all the boundary conditions except those at the boundary rZR. The remaining problem is to solve the unknown coefficients AðJ;LÞ , BðJ;LÞ and CnðJ;LÞ in the expressions for n n the radiated potentials and Am,n, Bm,n and Cm,n (mZ0,1,2,.; nZ1,2,.) in the expressions for the diffracted potentials. These unknown coefficients are determined by use of the conditions of continuity of pressure and normal velocity at rZR. For the radiation problem considered here, the conditions of continuity are the following ðJ;LÞ 4ðJ;LÞ R2 Z 4R1 K e1 % z%Kd1 (33) ðJ;LÞ 4ðJ;LÞ R3 Z 4R1 K h1 % z%Ke2 (34) Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 v4ðJ;LÞ R1 vr 8 dJ;1 ½d2;L C ðz K z0 Þd3;L > > > > > ðJ;LÞ > > > v4R2 < vr Z dJ;2 ½d2;L C ðz K z0 Þd3;L > > > > > ðJ;LÞ > > > : v4R3 vr 249 Kd1 % z% 0 Ke1 % z%Kd1 Ke2 % z%Ke1 (35) Kh1 % z%Ke2 For the diffraction problem, the conditions of continuity are expressed by FD2 Z FD1 r Z R; K e1 % z%Kd1 (36) FD3 Z FD1 r Z R; K h1 % z%Ke2 (37) 8 vF > > K I > > vr > > > > vFD2 > vFD1 < vr Z vF > vr > > K I > > vr > > > > : vFD3 vr r Z R; K d1 % z% 0 r Z R; K e1 % z%Kd1 (38) r Z R; K e2 % z%Ke1 r Z R; K h1 % z%Ke2 If the method of matched eigenfunction expansion is applied at the boundary rZR, one can easily obtain the following expressions ðKd1 ðKd1 4ðJ;LÞ ðR; zÞcos½b ðz C e Þ dz Z 4ðJ;LÞ (39) i 1 R1 R2 ðR; zÞcos½bi ðz C e1 Þ dz Ke1 ðKe2 Ke1 4ðJ;LÞ R1 ðR; zÞcos½gi ðz C h1 Þ Kh1 ð0 Kh1 ðKe2 dz Z 4ðJ;LÞ R3 ðR; zÞcos½gi ðz C h1 Þ dz (40) Kh1 v4ðJ;LÞ R1 ðr; zÞ jrZR cos½li ðz C h1 Þdz vr ðKd1 Z ðKe2 ðJ;LÞ v4ðJ;LÞ v4R3 ðr; zÞ R2 ðr; zÞ jrZR cos½li ðz C h1 Þdz C jrZR cos½li ðz vr vr Ke1 Kh1 ð0 dJ;1 ½d2;L C ðz K z0 Þd3;L cos½li ðz C h1 Þdz C h1 Þdz C Kd1 ðKe1 dJ;2 ½d2;L C ðz K z0 Þd3;L cos½li ðz C h1 Þdz (41) ðFD1 K FD2 Þcos½bi ðz C e1 ÞcosðjqÞdq dz Z 0 (42) C Ke2 ð 2p ðKd1 0 Ke1 250 Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 ð 2p ðKd1 0 ðFD1 K FD3 Þcos½gi ðz C h1 ÞcosðjqÞdq dz Z 0 (43) Ke1 ð 2p ð 0 vFD1 jrZR cos½li ðz C h1 ÞcosðjqÞdq dz 0 Kh1 vr ðKd1 ðKe1 ðKe2 ð 2p ð 0 vFI vFD2 vFI vFD3 C C C Z cos½li ðz C h1 Þdz 0 Kd1 vr Ke1 vr Ke2 vr Kh1 vr ð44Þ !cosðjqÞdq Substitution of the expressions derived above for 4ðJ;LÞ and FD into Eqs. (39)–(44) yields R ( ðJ;LÞ N X Bi h2 R1Kd1;L i Z 1 ðJ;LÞ AðJ;LÞ Eðl ; b Þ Z P C (45) j i j 1i BðJ;LÞ h =2 iO 1 jZ1 2 i N X ( AðJ;LÞ Eðlj ; gi Þ j Z PðJ;LÞ 2i C jZ1 CiðJ;LÞ h3 R1Kd1;L iZ1 CiðJ;LÞ h3 =2 iO 1 ðJ;LÞ DðLÞ AðJ;LÞ i li Nðli Þ Z P3i " BðJ;LÞ ð1 K d1;L ÞRKd1;L 1 C C N X (46) # BðJ;LÞ Db ð1 K d1;L ; jÞ j Eðli ; bj Þ jZ2 " C C1ðJ;LÞ ð1 K d1;L ÞRKd1;L C N X # CjðJ;LÞ Dg ð1 K d1;L ; jÞ Eðli ; gj Þ jZ2 (47) N X ( Am;j Eðlj ; bi Þ Z P4 ðm; iÞ C jZ1 N X ( Am;j Eðlj ; gi Þ Z P5 ðm; iÞ C jZ1 Bm;i h2 Rm i Z1 Bm;i h2 =2 iO 1 Cm;i h3 Rm iZ1 Cm;i h3 =2 iO 1 Am;i Dl ðm; iÞNl ðiÞ Z P6 ðm; iÞ C mR C N X mK1 sinðli h2 Þ sinðli h3 Þ Bm;1 C Cm;1 li li (48) (49) ½Bm;j Db ðm; jÞEðli ; bj Þ C Cm;j Dg ðm; jÞEðli ; gj Þ jZ2 where iZ1,2,.N; mZ0,1,2,.N and (50) Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 Eðlj ; bi Þ Z ðKd1 251 cos½lj ðz C h1 Þcos½bi ðz C e1 Þdz (51a) cos½lj ðz C h1 Þcos½gi ðz C h1 Þdz (51b) Ke1 Eðlj ; gi Þ Z ðKe2 Kh1 Nl ðiÞ Z ð0 cos2 ½li ðz C h1 Þdz (52) Kh1 8 ð1Þ0 kHm ðkRÞ > > < ð1Þ Hm ðkRÞ Dl ðm; iÞ Z 0 > l > : i Km ðli RÞ Km ðli RÞ iZ1 (53a) iO 1 Db ðm; jÞ Z bj Im0 ðbj RÞ Im ðbj RÞ (53b) Dg ðm; jÞ Z gj Im0 ðgj RÞ Im ðgj RÞ (53c) PðJ;LÞ Z 1i ðKd1 4ðJ;LÞ R2P jrZR cos½bi ðz C e1 Þdz (54a) 4ðJ;LÞ R3P jrZR cos½bi ðz C e1 Þdz (54b) Ke1 PðJ;LÞ Z 2i ðKd1 Ke1 PðJ;LÞ 3i ð0 Z dJ;1 ½d2;L Kd1 ðKe1 C ðz K z0 Þd3;L cos½li ðz C h1 Þdz dJ;2 ½d2;L C ðz K z0 Þd3;L cos½li ðz C h1 Þdz ðKd1 ðJ;LÞ ðKe2 ðJ;LÞ v4R2P v4R3P C j cos½li ðz C h1 Þdz rZR cos½li ðz C h1 Þdz C vr vr rZR Ke1 Kh1 (54c) C Ke2 P4 ðm; iÞ Z igkAmm Jm ðkRÞ ðK1ÞiK1 sinh½kðh1 K d1 Þ K sinh½kðh1 K e1 Þ u coshðkh1 Þ k2 C b2i (55a) P5 ðm; iÞ Z igkAmm Jm ðkRÞ ðK1ÞiK1 sinh½kðh1 K e2 Þ u coshðkh1 Þ k2 C g2i (55b) 252 Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 igkAmm Jm0 ðkRÞ P6 ðm; iÞ Z u coshðkh1 Þ ð0 cosh½kðz C h1 Þcos½li ðz C h1 Þdz (55c) Kh1 , BðJ;LÞ , CnðJ;LÞ , Am,n, Bm,n and To obtain the numerical solutions to the coefficients AðJ;LÞ n n Cm,n, it is necessary to choose the finite terms of the infinite series to carry out the computation. If the first N and M!N terms of the infinite series are chosen for the radiated and diffracted problems, respectively, one can obtain three sets and M sets of system of equations, each set of system of equations consist of 3N equations with complex coefficients and equal number of unknowns. Making some arrangements for these equations yields ðJ;LÞ SðJ;LÞ R X R Z FR ðmÞ SðmÞ D X D Z FD ðL Z 1; 2; 3; J Z 1; 2Þ ðm Z 0; 1; .; MÞ (56a) (56b) where ðJ;LÞ ðJ;LÞ ; AðJ;LÞ ; .; AðJ;LÞ ; BðJ;LÞ ; .; BðJ;LÞ ; C2ðJ;LÞ ; .; CNðJ;LÞ T ; XR Z ½AðJ;LÞ N ; B1 N ; C1 1 2 2 XD Z ½Am;1 ; Am;2 ; .; Am;N ; Bm;1 ; Bm;2 ; .; Bm;N ; Cm;1 ; Cm;2 ; .; Cm;N T ; ðJ;LÞ SðJ;LÞ and SðmÞ and FðmÞ R D are the coefficient matrices; FR D are the right hand vectors of the ðJ;LÞ ðJ;LÞ systems of equations. The elements in SR and FR can be computed from Eqs. (45)–(47), ðmÞ while SðmÞ D and FD can be calculated by Eqs. (48)–(50), and their expressions are given in Appendices A and B for convenience to readers, respectively. The application of the solution method for the linear system of equations to Eq. (56) will give the results to the unknowns in the expressions of the radiated and diffracted potentials. So the radiated and diffracted potentials at any position in the fluid can be computed, and the wave forces, added masses and damping coefficients can be calculated from the linearized Bernoulli’s equation, which will be illustrated in Section 4. 4. Wave forces and hydrodynamic coefficients 4.1. Expressions for wave excitation forces The wave excitation forces are computed from the incident and diffracted wave potentials. The relation of the dynamic fluid pressure with the velocity potentials is obtained from the Bernoulli’s equation first, and then the integration of the dynamic pressure along the submerged surfaces of the cylinders is carried out subsequently, which will yield the expression for the wave excitation force of cylinder J in direction L as follow ðJ;LÞ ðJ;LÞ Kiut FWt Z FW e (57) Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 253 ðJ;LÞ where FW is the time-independent wave force which is computed by ð ðJ;LÞ FW Z iruðFI C FD ÞnL ds (58) SJ where SJ(JZ1,2) is the submerged surface of cylinder J; nL(LZ1,2,3) is the generalized outward normal from the fluid with n1Znz, n2Znx, n3Z(zKz0)nxKxnz; nx and nz are the components of the unit inward normal to the cylinders. For convenience to readers, the ðJ;LÞ expressions for FW obtained from Eq. (58) are given in Appendix C. It should be noted that the wave excitation force can also be calculated from the incident and radiated wave potentials. The application of the Green’s second identity and considering the boundary conditions for the radiated and diffracted potentials yield the following expression 2 ð 6 ðJ;LÞ FW Z r iu4 FI v4ðJ;LÞ R vn SJ ð ds K 4ðJ;LÞ R ð 3 vFI vFI 7 ds K 4ðJ;LÞ ds5 R vn vn S1 (59) S2 ð1;LÞ and the expressions for FW obtained from Eq. (59) are given in Appendix D. 4.2. Expressions for hydrodynamic coefficients The radiation forces can be computed from the radiated potentials due to the motions of the cylinders. For cylinder I in K direction, it is expressed by ðX 3 X 2 FRðI;KÞ Z r iu SI Z eKiut FðJ;LÞ eKiut nK ds R LZ1 JZ1 3 X 2 X ðJ;LÞ ðJ;LÞ ðJ;LÞ ½u2 AðJ;LÞ R CaðI;KÞ C iuAR CdðI;KÞ (60) LZ1 JZ1 ðJ;LÞ where CaðJ;LÞ ðI;KÞ and CdðI;KÞ represent the added mass and damping coefficient of cylinder I in direction K due to the motion mode L of cylinder J, respectively. The expressions for them are ð ðJ;LÞ ðJ;LÞ CaðI;KÞ Z r Re½4ðJ;LÞ (61) R cos½ð1 K d1;L ÞqnK ds Z Re½rfðI;KÞ SI ð ðJ;LÞ CdðJ;LÞ Z ru Im½4ðJ;LÞ R cos½ð1 K d1;L ÞqnK ds Z Im½rufðI;KÞ ðI;KÞ SI (62) 254 Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 where ðJ;LÞ fðI;KÞ ð Z 4ðJ;LÞ cos½ð1 K d1;L ÞqnK ds R (63) SI which can be expressed in a matrix form as 2 ð1;1Þ ð1;2Þ ð1;3Þ ð2;1Þ ð2;2Þ fð1;1Þ fð1;1Þ fð1;1Þ fð1;1Þ fð1;1Þ 6 ð1;1Þ ð1;2Þ ð1;3Þ ð2;1Þ ð2;2Þ 6f 6 ð1;2Þ fð1;2Þ fð1;2Þ fð1;2Þ fð1;2Þ 6 6 f ð1;1Þ f ð1;2Þ f ð1;3Þ f ð2;1Þ f ð2;2Þ 6 ð1;3Þ ð1;3Þ ð1;3Þ ð1;3Þ ð1;3Þ f Z6 6 ð1;1Þ ð1;2Þ ð1;3Þ ð2;1Þ ð2;2Þ 6 fð2;1Þ fð2;1Þ fð2;1Þ fð2;1Þ fð2;1Þ 6 6 ð1;1Þ ð1;2Þ ð1;3Þ ð2;1Þ ð2;2Þ 6 fð2;2Þ fð2;2Þ fð2;2Þ fð2;2Þ fð2;2Þ 4 2 ð1;1Þ fð2;3Þ ð1;2Þ fð2;3Þ ð1;3Þ fð2;3Þ ð2;1Þ fð2;3Þ ð2;2Þ fð2;3Þ ð1;1Þ fð1;1Þ 0 0 ð2;1Þ fð1;1Þ 0 ð1;2Þ fð1;2Þ ð1;3Þ fð1;2Þ 0 ð2;2Þ fð1;2Þ ð1;2Þ fð1;3Þ ð1;3Þ fð1;3Þ 0 ð2;2Þ fð1;3Þ 0 0 ð2;1Þ fð2;1Þ 0 ð1;2Þ fð2;2Þ ð1;3Þ fð2;2Þ 0 ð2;2Þ fð2;2Þ ð1;2Þ fð2;3Þ ð1;3Þ fð2;3Þ 0 ð2;2Þ fð2;3Þ 6 6 0 6 6 6 0 6 Z6 6 ð1;1Þ 6 fð2;1Þ 6 6 6 0 4 0 ð2;3Þ fð1;1Þ 3 7 ð2;3Þ 7 fð1;2Þ 7 7 ð2;3Þ 7 fð1;3Þ 7 7 ð2;3Þ 7 7 fð2;1Þ 7 ð2;3Þ 7 fð2;2Þ 7 5 ð2;3Þ fð2;3Þ 0 3 7 ð2;3Þ 7 fð1;2Þ 7 7 ð2;3Þ 7 fð1;3Þ 7 7 7 0 7 7 ð2;3Þ 7 7 fð2;2Þ 5 (64) ð2;3Þ fð2;3Þ As we know, f is a symmetrical matrix, so are the matrices for the added masses and damping coefficients, which can be used to verify indirectly the correctness of the expressions for the radiated potentials. The expressions for the nonzero elements in f are given in Appendix E for convenience to readers. 5. Results and discussions 5.1. Verification of the expressions for radiated and diffracted potentials As stated in Section 1, the method used here is the same as that in Berggren and Johansson (1992) where the method and the obtained expressions for the radiated potentials of heave motion in each subregion were verified. The expressions obtained here for the heave motion are the same as those in Berggren and Johansson (1992) which can be used to verify indirectly the correctness of the diffracted potentials because the wave forces including the vertical force, horizontal force and roll torque can be obtained not only by the incident and diffracted potentials using Eq. (58), but also by the incident and radiated potentials through Eq. (59). If the two results obtained by Eqs. (58) and (59) for the vertical force are the same, the correctness of Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 255 Table 1 Geometrical parameters for the calculation Case no. d1/h1 R/h1 e1/h1 e2/h1 1 2 3 4 5 6 0.1 0.1 0.1 0.1 0.1 0.1 0.2 0.2 0.2 0.2 0.5 1.0 0.25 0.4 0.7 0.4 0.4 0.4 0.35 0.5 0.8 0.5 0.5 0.5 Fig. 2. Dimensionless vertical forces on cylinders 1 and 2 of cases 1, 2 and 3. (a) Vertical force on cylinder 1 of case 1. (b) Vertical force on cylinder 2 of case 1. (c) Vertical force on cylinder 1 of case 2. (d) Vertical force on cylinder 2 of case 2. (e) Vertical force on cylinder 1 of case 3. (f) Vertical force on cylinder 2 of case 3. 256 Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 Fig. 3. Dimensionless horizontal forces on cylinders 1 and 2 of cases 1, 2 and 3. (a) Horizontal force on cylinder 1 of case 1. (b) Horizontal force on cylinder 2 of case 1. (c) Horizontal force on cylinder 1 of case 2. (d) Horizontal force on cylinder 2 of case 2. (e) Horizontal force on cylinder 1 of case 3. (f) Horizontal force on cylinder 2 of case 3. the diffracted potential is confirmed. After this, we can use the diffracted potential to verify the correctness of the expressions for the radiated potentials of sway and roll motions. In addition, the symmetry of the matrices for the added masses and damping coefficients can also be used to verify indirectly the correctness of the expressions for the radiated potentials of sway and roll motions, which will be illustrated in the following. Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 257 Fig. 4. Dimensionless torques on cylinders 1 and 2 of cases 1, 2 and 3 with z0Z0. (a) Torque on cylinder 1 of case 1. (b) Torque on cylinder 2 of case 1. (c) Torque on cylinder 1 of case 2. (d) Torque on cylinder 2 of case 2. (e) Torque of cylinder 1 of case 3. (f) Torque on cylinder 2 of case 3. The geometrical parameters, shown in Table 1 of cases 1–3, are taken from Berggren and Johansson (1992) where they were used for the calculation of the hydrodynamic coefficients of heave motion. Here we use them to calculate wave forces and the hydrodynamic coefficients of sway and roll motions which were not considered in Berggren and Johansson (1992) and to verify the expressions for the radiated and diffracted potentials. 258 Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 Fig. 5. Asymmetrical quantities of dimensionless added masses and damping coefficients. (a) Dimensionless heave added mass. (b) Dimensionless heave damping. (c) Dimensionless surge added mass. (d) Dimensionless surge damping. (e) Dimensionless pitch added mass. (f) Dimensionless pitch damping. In our computations the first 30 terms and 30!30 terms in the infinite series of the radiated and diffracted potentials are taken, respectively. The wave forces and the hydrodynamic coefficients shown in all figures of the following sections are nondimensionlized as follows (JZ1,2; LZ1,2,3) ( F ðJ;LÞ Z ðJ;LÞ j=ðrgpR2 AÞ L Z 1; 2 jFW ðJ;LÞ j=ðrgpR3 AÞ L Z 3 jFW Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 259 Fig. 6. Asymmetrical quantities of dimensionless added masses and damping coefficients. (a) Dimensionless heave added mass. (b) Dimensionless heave damping. (c) Dimensionless surge added mass. (d) Dimensionless surge damping. (e) Dimensionless pitch added mass. (f) Dimensionless pitch damping. Ca1ðJ;LÞ ðI;KÞ Z 8 ðJ;LÞ > CaðI;KÞ =ðrpR2 d1 Þ L Z 1; 2; K Z 1; 2 > > > > > 3 < CaðJ;LÞ ðI;KÞ =ðrpR d1 Þ L Z 1; 2; K Z 3 3 > > CaðJ;LÞ > ðI;KÞ =ðrpR d1 Þ L Z 3; K Z 1; 2 > > > : ðJ;LÞ CaðI;KÞ =ðrpR4 d1 Þ L Z 3; K Z 3 260 Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 Fig. 7. Symmetrical quantities of dimensionless added masses and damping coefficients of case 1. Cd1ðJ;LÞ ðI;KÞ Z 8 ðJ;LÞ > CdðI;KÞ =ðrpR2 d1 uÞ > > > > > 3 < CdðJ;LÞ ðI;KÞ =ðrpR d1 uÞ > > CdðJ;LÞ =ðrpR3 d1 uÞ > > ðI;KÞ > > : 4 CdðJ;LÞ ðI;KÞ =ðrpR d1 uÞ L Z 1; 2; K Z 1; 2 L Z 1; 2; K Z 3 L Z 3; K Z 1; 2 L Z 3; K Z 3 Fig. 2(a) and (b) shows the vertical forces on cylinder 1 and 2 of case 1, respectively. Fig. 2(c) and (d) gives the vertical forces of case 2, and the vertical Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 261 Fig. 8. Symmetrical quantities of dimensionless added masses and damping coefficients of case 1. forces of case 3 are illustrated in Fig. 2(e) and (f) where the solid lines and circles represent the results calculated by use of Eqs. (58) and (59), respectively. It can be seen from these figures that for all cases the results given by Eq. (58) are the same as those calculated by use of Eq. (59), which illustrates that the expressions for the diffracted potentials are correct due to the correctness of the expressions for the heave motion. Figs. 3 and 4 present the horizontal forces and the roll torques computed by Eqs. (58) and (59), respectively. We can see the two results obtained by Eqs. (58) and (59) are the same, which indicates that the expressions for the radiated potentials are 262 Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 Fig. 9. Hydrodynamic effects of the cylinders’ radii on excitation forces. (a) Vertical force on cylinder 1. (b) Vertical force on cylinder 2. (c) Horizontal force on cylinder 1. (d) Horizontal force on cylinder 2. (e) Pitch torque on cylinder 1. (f) Pitch torque on cylinder 2. correct. To further verify the correctness of the expressions for the radiated potentials, we compute the added masses and damping coefficients shown in Figs. 5–8. The results of the diagonal elements in the matrices for the added masses and damping coefficients are presented in Figs. 5 and 6, and the values of the non-diagonal symmetrical elements are given in Figs. 7 and 8. It can be seen from Figs. 7 and 8 that the values of the symmetrical elements are all the same which indicates further that the expressions for the radiated potentials are correct. Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 263 Fig. 10. Hydrodynamic effects of the cylinders’ radii on added masses and damping coefficients. (a) Dimensionless heave added mass. (b) Dimensionless heave damping. (c) Dimensionless surge added mass. (d) Dimensionless surge damping. (e) Dimensionless pitch added mass. (f) Dimensionless pitch damping. 5.2. Hydrodynamic effects of the cylinders’ radii In Section 5.1, we not only verified the correctness of the expressions given in this paper, but also considered the hydrodynamic effects of the submerged positions of cylinder 2, while in this section the hydrodynamic effects of the radius on the wave force, added masses, damping coefficients will be considered. The geometrical parameters are listed in Table 1 of cases 4–6. 264 Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 Fig. 11. Hydrodynamic effects of the cylinders’ radii on added masses and damping coefficients. (a) Dimensionless heave added mass. (b) Dimensionless heave damping. (c) Dimensionless surge added mass. (d) Dimensionless surge damping. (e) Dimensionless pitch added mass. (f) Dimensionless pitch damping. The hydrodynamic effects of the cylinders’ radii on the dimensionless excitation forces are shown in Fig. 9. For fixed d1/h1, e1/h1 and e2/h1, the lager the radii of the cylinders, the smaller the dimensionless vertical and horizontal wave forces and the larger the dimensionless roll torque on cylinder 1 and the smaller the dimensionless roll torque on cylinder 2. Figs. 10 and 11 illustrate the hydrodynamic effects of the cylinders’ radii on the dimensionless added mass and damping coefficients. For fixed d1/h1, e1/h1 and e2/h1, ð1;1Þ ð1;3Þ ð1;3Þ ð2;1Þ ð2;1Þ ð2;3Þ ð2;3Þ ð2;2Þ Ca1ð1;1Þ ð1;1Þ , Cd1ð1;1Þ , Ca1ð1;3Þ , Cd1ð1;3Þ , Ca1ð2;1Þ , Cd1ð2;1Þ , Ca1ð2;3Þ , Cd1ð2;3Þ , and Cd1ð2;2Þ Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 265 ð1;2Þ ð2;2Þ increase with the augment of the cylinders’ radii, while Ca1ð1;2Þ ð1;2Þ , Cd1ð1;2Þ and Ca1ð2;2Þ decrease. In a sum, the rule of the influence of the cylinders’ radii on the hydrodynamic properties is relatively simple and deserves attention of designers. 6. Conclusions In order to analyze the dynamics of a system in waves, it is necessary to study the hydrodynamic coefficients and wave forces so as to obtain some important information for designers. Here the method of separation of variables and the method of matched eigenfunction expansion are used to obtain the analytical expressions for the radiated and diffracted potentials. By using the analytical expressions, the hydrodynamic coefficients and wave forces are calculated for some specific examples, and the hydrodynamic effects of the radius on the hydrodynamic properties of the cylinders are investigated, which may provide some useful information for designers. Acknowledgements This research is supported by the Chinese Academy of Sciences Foundation under Grant No. KGCX2-SW-305, the High Tech Research and Development (863) Program of China under Grant No. 2003AA516010, Chinese National Science Fund for Distinguished Young Scholars under Grant No. 50125924 and the National Natural Science Foundation of China under grant Nos. 50379001 and 10332050. ðJ;LÞ ðJ;LÞ Appendix A. Expressions for the elements in SR and FR SðJ;LÞ Ri;j Z Eðlj ; bi Þ ( SðJ;LÞ Ri;NCi Z (A1) Kh2 R1Kd1;L iZ1 Kh2 =2 iO 1 (A2) ðJ;LÞ FRi Z PðJ;LÞ 1i (A3) SðJ;LÞ RNCi;j Z Eðlj ; gi Þ (A4) ( SðJ;LÞ RNCi;2NCi Z ðJ;LÞ FRNCi Z PðJ;LÞ 2i Kh3 R1Kd1;L iZ1 Kh3 =2 iO 1 (A5) (A6) 266 Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 SðJ;LÞ R2NCi;i Z Dl ð1 K d1;L ; jÞNðli Þ ( SðJ;LÞ R2NCi;NCj Z Kð1 K d1;L ÞRKd1;L Eðli ; bj Þ j Z 1 KDb ð1 K d1;L ; jÞEðli ; bj Þ ( SðJ;LÞ R2Nþi;2Nþj (A7) ¼ (A8) jO 1 Kð1 K d1;L ÞRKd1;L Eðli ; gj Þ j ¼ 1 KDg ð1 K d1;L ; jÞ Eðli ; gj Þ (A9) jO 1 ðJ;LÞ Z PðJ;LÞ FR2NCi 3i (A10) where iZ1,2,.,N; jZ1,2,.,N; LZ1,2,3; JZ1,2. All the other elements in SðJ;LÞ are zero. R ðmÞ Appendix B. Expressions for the elements in SD and FðmÞ D SðmÞ Di;j Z Eðlj ; bi Þ ( SðmÞ Di;NCi Z (B1) Kh2 Rm iZ1 Kh2 =2 iO 1 (B2) ðmÞ FDi Z P4 ðm; iÞ (B3) SðmÞ DNCi;j Z Eðlj ; gi Þ (B4) ( SðmÞ DNCi;2NCi Z Kh3 Rm iZ1 Kh3 =2 iO 1 (B5) ðmÞ FDNCi Z P5 ðm; iÞ SðmÞ D2NCi;i Z (B6) li Rm0 ðli RÞNl ðiÞ Rm ðli RÞ SðmÞ D2NCi;NCj Z 8 < (B7) sin½li ðh1 K d1 Þ K sin½li ðh1 K e1 Þ li : KD ðm; jÞEðl ; b Þ b i j SðmÞ D2NCi;2NCj Z KmRmK1 8 < sinðli h3 Þ l : KD ðm; jÞEðl i; g Þ g i j KmRmK1 j Z1 (B8) jO 1 j Z1 (B9) jO 1 ðmÞ FD2NCi Z P6 ðm; iÞ where iZ1,2,.,N; jZ1,2,.,N; mZ0,1,2,.,M. All the other elements in (B10) SðmÞ D are zero. Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 ðJ;LÞ Appendix C. Expressions for FW obtained from Eq. (58) " # N B0;1 R2 X RI1 ðbn RÞ ð1;1Þ FW Z 2pr iu C B0;n cosðbn h2 Þ bn I0 ðbn RÞ 2 nZ2 " N ðC0;1 K B0;1 ÞR2 X ð2;1Þ C Z 2pr iu W0n FW 2 nZ2 ð1;2Þ ZKr ipuR FW ð0 N X 267 (C1) # A1;n cos½ln ðz Ch1 Þdz CCF2 Kd1 nZ1 (C2) sinhðkh1 ÞKsinh½kðh1 Kd1 Þ k (C3) ð2;2Þ FW ZKr ipuR ðKe1 X N A1;n cos½ln ðzCh1 ÞdzCCF2 Ke2 nZ1 sinh½kðh1 Ke1 Þ Ksinhðkh3 Þ k (C4) ð1;3Þ FW ZKpr iuR N X ð0 A1;n ðzKz0 Þcos½ln ðzCh1 Þdz Kd1 nZ1 " # N B1;1 R4 X B1;n R2 cosðbn h2 Þ I2 ðbn RÞ C Kpr iu CCF2 CTk1 I1 ðbn RÞ bn 4 nZ2 ð2;3Þ ZKpr iuR FWD N X ð Ke1 A1;n nZ1 (C5) ðz Kz0 Þcos½ln ðz Ch1 Þdz Ke2 ( ) N ðC1;1 KB1;1 ÞR4 X C W1n CCF2 CTk2 Kpr iu 4 nZ2 (C6) where CF2 ZK 2 iprgARJ1 ðkRÞ coshðkh1 Þ CTk1 Z Kz0 sinhðkh1 ÞCðd1 Cz0 Þsinh½kðh1 Kd1 Þ coshðkh1 ÞKcosh½kðh1 Kd1 Þ K k k2 CTk2 Z ðe2 Cz0 Þsinh½kðh1 Ke2 Þ Kðe1 Cz0 Þsinh½kðh1 Ke1 Þ k C cosh½kðh1 Ke2 Þ Kcosh½kðh1 Ke1 Þ k2 268 Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 W0n ZC0;n cosðgn h3 Þ RI1 ðgn RÞ RI ðb RÞ KB0;n 1 n gn I0 ðgn RÞ bn I0 ðbn RÞ W1n ZC1;n cosðgn h3 Þ R2 I2 ðgn RÞ R2 I2 ðbn RÞ KB1;n gn I1 ðgn RÞ bn I1 ðbn RÞ Appendix D. Expressions for Fð1;LÞ obtained from Eq. (59) W ð1;1Þ FW Z CF1 RJ1 ðkRÞcosh½kðh1 Kd1 Þ k2 ) ðR ( 2 N h2 Kr 2 =2 X I0 ðbn rÞ ð1;1Þ CCB1 C Bn cosðbn h2 Þ J ðkrÞr dr 2h2 I0 ðbn RÞ 0 0 nZ1 ðR ( KCB2 0 ð R (X N CCB3 CCL1 ) N Kr 2 =2 X ð1;1Þ I0 ðbn rÞ J ðkrÞr dr C Bn 2h2 I0 ðbn RÞ 0 nZ1 I ðg rÞ Cnð1;1Þ cosðgn h3 Þ 0 n I0 ðgn RÞ nZ1 0 N X Að1;1Þ n ð 0 ) J0 ðkrÞr dr Fðk; ln ;z; h1 ÞdzC ðKe1 Fðk; ln ; z;h1 Þdz ðD1Þ Ke2 Kd1 nZ1 sinhðkh1 ÞKsinh½kðh1 Kd1 Þ k ) ðR ( N X I1 ðbn rÞ ð1;2Þ ð1;2Þ CiCB1 B1 r C Bn cosðbn h2 Þ J ðkrÞr dr I1 ðbn RÞ 1 0 nZ2 ð1;2Þ FW Z CF2 ðR ( KiCB2 0 ðR ( CiCB3 0 N X CCL2 nZ1 Bð1;2Þ 1 rC C1ð1;2Þ r C Að1;2Þ n ð 0 Kd1 N X I1 ðbn rÞ Bð1;2Þ n I 1 ðbn RÞ nZ2 ) J1 ðkrÞr dr N X I ðg rÞ Cnð1;2Þ cosðgn h3 Þ 1 n I 1 ðgn RÞ nZ2 Fðk;ln ; z;h1 Þdz C ðKe1 Ke2 ) J1 ðkrÞr dr Fðk;ln ; z; h1 Þdz ðD2Þ Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 ð1;3Þ FW ZKiCF1 cosh½kðh1 Kd1 Þ 269 R2 J2 ðkRÞ CCF2 CTk1 k ) ðR ( N X h22 r Kr 3 =4 I1 ðbn rÞ ð1;3Þ ð1;3Þ CiCB1 K CB1 r C Bn cosðbn h2 Þ J ðkrÞr dr 2h2 I1 ðbn RÞ 1 0 nZ2 ðR ( KiCB2 0 ðR ( CiCB3 CCL2 0 N X ) N X r3 ð1;3Þ ð1;3Þ I1 ðbn rÞ J ðkrÞr dr CB1 r C Bn I1 ðbn RÞ 1 8h2 nZ2 C1ð1;3Þ r C Að1;3Þ n nZ1 ð 0 N X I ðg rÞ Cnð1;3Þ cosðgn h3 Þ 1 n I 1 ðgn RÞ nZ2 Fðk;ln ; z; h1 Þdz C ð Ke1 ) J1 ðkrÞr dr Fðk; ln ;z; h1 Þdz ðD2Þ Ke2 Kd1 where CB1 ZKCF1 sinh½kðh1 Kd1 Þ, CB2 ZKCF1 sinh½kðh1 Ke1 Þ, CB3 ZKCF1 sinhðkh3 Þ, CL1 ZKCF1 RJ1 ðkRÞ, CL2 ZiCF1 R½J0 ðkRÞKJ2 ðkRÞ=2, CF1 Z2prgkA=coshðkh1 Þ, Fðk; ln ;z; h1 ÞZcosh½kðzCh1 Þcos½ln ðzCh1 Þ. Appendix E. Expressions for the nonzero elements in f " # N 2 X h 2 R2 R4 Bð1;1Þ R RI ðb RÞ 1 n ð1;1Þ ð1;1Þ K C fð1;1Þ Z 2p Bn cosðbn h2 Þ C 1 bn I0 ðbn RÞ 4 16h2 2 nZ2 " ð2;1Þ fð1;1Þ N R4 Bð2;1Þ R2 X RI ðb RÞ C Z 2p C 1 Bð2;1Þ cosðbn h2 Þ 1 n n b 16h2 2 n I0 ðbn RÞ nZ2 (E1) # (E2) ( ð1;1Þ fð2;1Þ N 2 X R4 ½C ð1;1Þ K Bð1;1Þ RI ðg RÞ 1 R C C 1 Cnð1;1Þ cosðgn h3 Þ 1 n gn I0 ðgn RÞ 16h2 2 nZ2 ) N X RI1 ðbn RÞ K Bð1;1Þ n b n I0 ðbn RÞ nZ2 Z 2p ( ð2;1Þ fð2;1Þ Z 2p ðh2 C h3 ÞR2 R4 K 4 16 2 1 1 ½C ð2;1Þ K Bð2;1Þ 1 R C C 1 h2 h3 2 N X RI ðg RÞ RI1 ðbn RÞ C Cnð2;1Þ cosðgn h3 Þ 1 n K Bð2;1Þ n gn I0 ðgn RÞ nZ2 bn I0 ðbn RÞ nZ2 N X ðj;lÞ fð1;2Þ Z KRp N X nZ1 Aðj;lÞ n (E3) sinðln h1 Þ K sin½ln ðh1 K d1 Þ ln ) (E4) (E5) 270 Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 N X ðj;lÞ fð2;2Þ Z KRp Anðj;lÞ nZ1 N X ðj;lÞ Z KpR fð1;3Þ nZ1 Anðj;lÞ sin½ln ðh1 K e1 Þ K sin½ln ðh1 K e2 Þ ln ð0 (E6) cos½ln ðz C h1 Þðz K z0 Þdz Kd1 " # N B1ðj;lÞ R4 X R2 I2 ðbn RÞ ðj;lÞ ðj;lÞ C Bn cosðbn h2 Þ Kp K pfPð1;3Þ b 4 I ðb RÞ n 1 n nZ2 (E7) ( ) N 4 2 2 X ½C1ðj;lÞ KBðj;lÞ R R I ðg RÞ R I ðb RÞ 2 n 2 n 1 C KBðj;lÞ Cnðj;lÞ cosðgn h3 Þ n gn I1 ðgn RÞ bn I1 ðbn RÞ 4 nZ2 ð N Ke1 X ðj;lÞ Aðj;lÞ cos½ln ðzCh1 ÞðzKz0 ÞdzKpfPð2;3Þ (E8) KpR n ðj;lÞ ZKp fð2;3Þ nZ1 Ke2 ð1;2Þ ð2;2Þ ð1;2Þ ð2;2Þ ZfPð1;3Þ ZfPð2;3Þ ZfPð2;3Þ Z0 fPð1;3Þ where jZ1,2; lZ2,3. 8 4 2 R R > > K h2 < 8 6h2 ðj;3Þ fPð1;3Þ Z 6 > R > :K 48h2 j Z1 j Z2 8 R6 > > <K 48h2 ðj;3Þ fPð2;3Þ Z 6 > R 1 1 R4 ðh2 C h3 Þ > : C K 8 48 h2 h3 j Z1 j Z2 References Berggren, L., Johansson, M., 1992. Hydrodynamic coefficients of a wave energy device consisting of a buoy and a submerged plate. Applied Ocean Research 14, 51–58. Bhatta, D.D., Rahman, M., 2003. On scattering and radiation problem for a cylinder in water of finite depth. International Journal of Engineering Science 41, 931–967. Black, J.L., Mei, C.C., Bray, M.C.G., 1971. Radiation and scattering of water waves by rigid bodies. Journal of fluid mechanics 46, 151–164. Calisal, S.M., Sabuncu, T., 1984. Hydrodynamic coefficients for vertical composite cylinders. Ocean Engineering 11 (5), 529–542. Calisal, S.M., Sabuncu, T., 1993. A generalized method for the calculation of hydrodynamic forces on discontinuous vertical cylinders. Ocean Engineering 20 (1), 1–18. Eidsmoen, H., 1995. Hydrodynamic parameters for a two-body axisymmetric system. Applied Ocean Research 17, 103–115. Kagemoto, H., Yue, D.K.P., 1986. Interactions among multiple three-dimensional bodies in water waves: an exact algebraic method. Journal of Fluid Mechanics 166, 189–209. Linton, C.M., Evans, D.V., 1993. Hydrodynamic characteristics of bodies in Channels. Journal of Fluid Mechanics 252, 647–666. Y.H. Zheng et al. / Ocean Engineering 32 (2005) 241–271 271 McIver, P., Bennett, G.S., 1993. Scattering of water waves by axisymmetric bodies in a channel. Journal of Engineering Mathematics 27, 1–29. Sabuncu, T., Calisal, S., 1981. Hydrodynamic coefficients for vertical circular cylinders at finite depth. Ocean Engineering 8, 25–63. Simon, M.J., 1982. Multiple scattering in arrays of axisymmetric wave-energy devices, Part 1. A matrix method using a plane-wave approximation. Journal of Fluid Mechanics 120, 1–25. Williams, A.N., Abul-Azm, A.G., 1989. Hydrodynamic interactions in floating cylinder arrays—II. Wave radiation. Ocean Engineering 16 (3), 217–263. Williams, A.N., Demirbilek, Z., 1988. Hydrodynamic interactions in floating cylinder arrays—I. Wave scattering. Ocean Engineering 15 (6), 549–583. Williams, A.N., Rangappa, T., 1994. Approximate hydrodynamic analysis of multi-column ocean structures. Ocean Engineering 21 (6), 519–573. Williams, A.N., Li, W., Wang, K.H., 2000. Water wave interaction with a floating porous cylinder. Ocean Engineering 27, 1–28. Wu, B.J., Zheng, Y.H., You, Y.G., Sun, X.Y., Chen, Y., 2004. On diffraction and radiation problem for a cylinder over a caisson in water of finite depth. International Journal of Engineering Science 42, 1193–1213. Yeung, R.W., 1981. Added mass and damping of a vertical cylinder in finite-depth waters. Applied Ocean Research 3 (3), 119–133. Yeung, R.W., Sphaier, S.H., 1989. Wave-interference effects on a truncated cylinder in a channel. Journal of Engineering Mathematics 23, 95–117.
 0
0

No more boring flashcards learning!
Learn languages, math, history, economics, chemistry and more with free StudyLib Extension!
- Distribute all flashcards reviewing into small sessions
- Get inspired with a daily photo
- Import sets from Anki, Quizlet, etc
- Add Active Recall to your learning and get higher grades!
Related documents





Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users