Hybrid On-Line Experiments and Monitoring of Structural Systems
advertisement

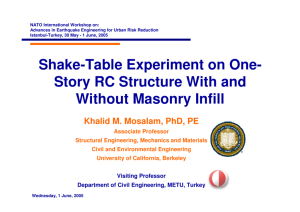
Final Report of Project CMS 0116005 Hybrid On-Line Experiments and Monitoring of Structural Systems By Khalid M. Mosalam, PI Overview and Summary of Findings In order to develop new modeling techniques and study the behavior of reinforced concrete (RC) buildings with unreinforced masonry (URM) infill walls, a two-phase experimental and analytical study is conducted. The experimental investigation consists of a shaking table experiment and a pseudo-dynamic (on-line) simulation. The shaking table experiment serves as a benchmark test for the development of a unified on-line experimental technique combined with simulations utilizing the pseudo-dynamic concepts with substructuring. Both experiments also serve the purpose of validation and calibration of analytical models being developed using Open System for Earthquake Engineering Simulation (OpenSees). The objectives of the modeling effort are: (1) to enable accurate representation of the in-plane and out-of-plane behavior of URM infill walls, and (2) to refine the modeling techniques of hysteretic response and strength and stiffness degradation in elements and joints of RC moment frames interacting with URM infill walls. A schematic illustration of the conducted tasks is given in Figure 1. Prototype structure C1 C2 Shaketable tests Damage sequence and collapse mechanism Development of element removal algorithms B3 A3 Infill-RC frame interaction A1 A2 B1 B2 C4 Pseudodynamic test B4 A4 Development and Validation of FE model Improvement of quasi-brittle material models Verification of pseudo-dynamic with sub-structuring Development of new SAT models Development of new “progressively collapsing” macro-elements for infilled frames Development of hybrid control algorithm with mixed-variables (mode switch between force & deformation) Figure 1. Overview of the project The combined shaking table and pseudo-dynamic experimental effort is summarized in Figure 2. The shaking table experiment is divided into three phases. In the phase 1, the structure is tested as RC frame with URM infill and columns of the RC frames are prestressed to simulate effect of upper stories. In phase 2, the URM is removed after complete collapse and the RC columns remained prestressed. In phase 3, the prestressing of RC columns is removed and the bare structure is tested to significant damage state. On The pseudo-dynamic test program comprises structural behavior as well as parametric studies as shown in Figure 2. Although the shaking table experiment is conducted in the already existing seismic simulator test facility of the University of California, Berkeley (UCB), the new hybrid testing system at UCB, developed as part of nees@berkeley, is used to implement the pseudo-dynamic experimental part of this study. This new system consists of several components interconnected to allow for an efficient implementation of on-line testing technique with flexibility in designing the test set up. It is to be noted that the validation of the nees@berkeley system is sought as part of this project where a structure with predictable behavior is utilized. Two steel substructures are designed to exhibit linear and bilinear behaviors, Figure 2. The experiment is carried out and the results are compared to a purely numerical simulation proving the validity of the system to conduct the hybrid simulation part of the current project. Shaketable test Phases 2&3 Shaketable test phase1 S = Structural evaluation P = Parametric study S-1 S-2 Hybrid testing system validation Frame No.1 Infilled F1I One story RC frame with and without URM infill + prestressed columns F2B F2B Infill removed after collapse + prestressed columns Columns not prestressed P-1 F1B P-2 NL model Testing rate study 50 Frame No.2 Bare F2B S-3 F1I F2B 0 -50 -0.1 0 0.1 F1B Multi-story shear building with substructures DOF P-4 P-3 Error compensation Mixed formulation: switching between force and displacement control Figure 2. Overview of experimental program The experiments are carried out on a one-story RC moment-resisting frame structure with URM infill wall. The ¾-scale test structure represents the first story middle frames substructure of a five-story three-bay by two-bay RC prototype structure designed based on the requirements of ACI318-02 and NEHRP recommendations in seismic regions. URM walls are assumed inside the interior frames as shown in Figure 3. As mentioned before, both the shaking table and the pseudo-dynamic experiments are carried out in three phases as described in Figure 2. The ground motions for the experiment are Northridge (Tarzana, CA 1994) denoted by TAR, Duzce (Turkey 1999) denoted by DUZ and Loma Prieta (Bran, CA 1989) denoted by LomaPr. These ground motions are scaled based on the NEHRP design spectra to generate different intensity levels. The Scale factors for these ground motions are summarized in Table 1. The design spectrum and the spectra for the input ground motions are shown in Figure 5. C2 C1 B1 B2 A2 A1 C1 C2 B3 A3 A1 A2 B1 B2 C4 B4 A4 (a) Prototype structure (b) Prototype (c) Shake-table substructure test Figure 3. Test configuration (d) Pseudodynamic test Stage one (Infilled system with TAR 1 columns prestressed) AWR- AWR- AWR- AWR- AWR- AWR- AWR- AWR- LomaPr 2 AWRTAR 1 AWRTAR 2 AWRTAR 3 AWRTAR 4 AWRTAR 6 AWRDUZ 7 AWRDUZ 8 AWR- LomaPr 2 DUZ 9 Stage two (Bare system with TAR 2 TAR 3 TAR 4 TAR 6 DUZ 7 DUZ 8 DUZ 7-2 columns prestressed) LomaPr 6 LomaPr 7 LomaPr 8 LomaPr 9 LomaPr LomaPr LomaPr LomaPr 9-2 9-3 9-4 9-5 Stage three (Bare system LomaPr LomaPr LomaPr LomaPr LomaPr LomaPr LomaPr LomaPr LomaPr LomaPr 2-2 3-2 4-2 6-2 7-2 8-2 9-2-1 9-2-2 9-2-3 9-2-4 without columns prestressed) LomaPr 9-6 Figure 4. Complete test sequence of the experiments Table 1. Scale factors for different levels of input ground motions Level 1 2 3 4 6 7 8 9 Northridge, CA, 1994 (TAR) 0.05 0.17 0.23 0.39 0.59 Duzce, Turkey, 1999 (DUZ) - 1.50 2.00 2.53 Loma Prieta, CA, 1989 (LomaPr) - 0.31 0.44 0.67 1.00 1.50 1.95 2.19 2.5 ← Begining of the test ← TAR 4 ← TAR 6 ← After removal Northridge, Tarzana of the wall 1 1.57g 0 Acceleration [g] Spectral acceleration [g] 2 Duzce Northridge Design Spectrum 1.5 1 -1 0 5 10 15 Duzce 1 0 0.5 -1 ← DUZ 8 0 ← DUZ 7 0 0 0.2 0.4 0.6 Period [sec] 0.8 5 10 Time [sec] 15 1 Figure 5. Five percent damping response spectra for the selected ground motions The results of the shaking table experiment are extensively analyzed and important aspects of the structural response are studied. The effects of the URM wall on the dynamic response of the structure in terms of stiffness and damping as well as energy dissipation and distribution of forces in the structural system are presented in different publications. For example, the distribution of forces between the URM wall and the RC frame during the first phase the experiment is shown in Figure 6(a). On the other hand, Figure 6(b) shows the change in the shear force in the RC slab as the force distribution in the structure varies during this phase of testing. The peak base-shear versus drift for different levels of the experiment as well as the change in the damping ratio of the structure is shown in Figure 7(a) and Figure 7(b), respectively. The change in the natural period of the test structure during different phases of the shaking table experiment is shown in Figure 8. 180 800 0.55 URM wall RC Frame 700 600 120 500 100 400 80 [kN] Base shear [kips] 140 300 60 200 40 100 20 0 TAR 1 TAR 2 TAR 3 TAR 4 TAR 6 DUZ 7 DUZ 8 DUZ 7-2 Slab shear to base shear ratio 160 0.5 Case: VA=VC=0 → VS=Vb/2 TAR 1 TAR 2 0.45 V S B V S TAR 3 V B VA V b B TAR 4 V C TAR 6 0.4 DUZ 7 DUZ 8 Case: VA=VB=VC → VS=Vb/3 0 Test level Test Levels (a) Distribution of base shear between the (b) Slab-shear demand as a portion of the URM wall and RC frame base shear in the test structure Figure 6. Force distributions in test structure for phase 1 of the shaking table experiment. 200 14 DUZ 8 AWR-TAR 6 DUZ 7 LomaPr 9 DUZ 7-2 12 150 TAR 6 LomaPr 9-6 Damping ratio [%] Maximum Vb / Wtotal [%] DUZ 7 LomaPr 8-2 100 LomaPr 9-1 TAR 4 LomaPr 9-4 LomaPr 6 50 0 0 TAR 1 LomaPr 2 2 4 6 Corresponding drift [%] Stage 1 Stage 2 Stage 3 LomaPr 9-2-1 LomaPr 9-6 10 TAR 3 8 LomaPr 9 AWR-TAR 6 6 LomaPr 9-2-4 LomaPr 2-2 4 2 8 Regression Energy equivalent TAR 4 T AR 1 AWR-TAR 1 0 Test levels (a) Peak force-deformation plots (b) Change in the damping ratio Figure 7. Change of dynamic properties of the test structure during the phases (stages) of the shaking table experiment 1 Results using ground motion signals Results using white-noise signals Natural period [sec] 0.8 Removal of the Removal of the Prestressing wall 0.6 Wall cracking 0.4 0.2 Stage three Stage two Stage one 0 Test levels Figure 8. Change in the natural period of the test structure during the three phases (stages) of the shaking table experiment. Efforts are underway to reproduce the experimental results using the finite element method and extend the findings of the study to more general configurations with URM infill panels. The calibrated model can be used for reliability analysis of such structures, providing a probabilistic fragility curves and laying the foundation for performance based design of structures with URM infill walls. In the pseudo-dynamic experiment, the structure tested on the shaking table is idealized as a 3 degree of freedom model, with one spring representing the stiffness of each frame and a numerical model of a spring representing the RC slab connecting the frames, Figure 9. One RC frame with URM infill is physically modeled while the other bare frame is numerically simulated using symmetry. These frames correspond to frames B1-B2, A1A2 and C1-C2, respectively, as indicated in Figure 3(b). In the structural phases, S-1, S-2 and S-3, Figure 2, the structure is tested using a series of strong motions until the collapse of the wall. The same sequence of ground motions used in the shaking table experiment is adopted in the hybrid simulation to allow the comparison between the two experiments. m : inertia mass k : stiffness BF : Bare Frame IF : Infilled Frame S : Slab mBF kBF kS kIF loading direction mIF kS mBF kBF Figure 9. Idealized test structure for pseudo-dynamic experiment In general, reasonable agreement between the results of the shaking table and pseudodynamic experiments is observed. Peak force and peak displacement results for the two experiments match reasonable well, Figure 10. Moreover, similar trends are observed in the effect and contribution of the URM wall, Figure 11. However, the shape of the forcedeformation plots and the extent of damage are significantly different. The discrepancies are attributed to the differences in the nature of two experiments, in terms of the speed of the test and the inherit assumptions in the pseudo-dynamic test method, e.g. damping. Extensive analysis of the results on the local level is conducted. b Maximum V / W total [%] 200 DUZ 7 DUZ 8 150 TAR 6 100 50 TAR 4 TAR 3 TAR 2 TAR 1 0 0 0.5 Shake-table Pseudo-dynamic 1 1.5 2 Corresponding drift [%] 2.5 Figure 10. Global response of the test structures from the shaking table and pseudodynamic experiments (a) Shaking table experiment (b) Pseudo-dynamic experiment Figure 11. Comparison between crack patterns of the URM infill wall for the shaking table and pseudo-dynamic experiments In phase P-1 of the pseudo-dynamic experiment, Figure 2, a hypothetical structure is tested using a calibrated hysteretic Bouc-Wen model to numerically simulate the URM infilled frames, while Frame F1B represents the physical substructure. This allows a better understanding of the effects of the higher modes on the dynamic behavior of the test structure. In phases P-2 and P-4 of the pseudo-dynamic experiment, Figure 2, an evaluation of the error in applying the command displacement and its variation with the different testing rates is examined. A direct strong correlation between the actuator velocity and the displacement error is observed, which allows the accurate prediction of the expected error. An error compensation scheme is thus implemented, and the results show a more accurate execution of the hybrid simulation, Figure 12. Error [%] 1 Uncompensated Error Compensated Error 0.5 0 -0.5 -1 0 2 4 6 8 10 12 14 16 Time [sec] Figure 12. Error compensation in the hybrid simulation (pseudo-dynamic) experiment A new mixed force/displacement formulation algorithm is derived departing from the implicit α -method, Figure 13. The limits and validity of the algorithm are examined through a numerical parametric study. The algorithm is integrated as part of the hybrid testing system, and a simulation is applied on the test structure in phase P-3, Figure 2. The mode switch between displacement and force control is implemented smoothly during the test and the algorithm shows great potential for various possible applications in hybrid testing, Figure 14. Define thresholds Kd, Kf , Vd, Vf Kd < Kf and Vd < Vf Start Switch to force control mode End Yes Yes No Stay at current Mode Switch to displacement Control Mode Vi > Vf Calculate Ki, Vi Displacement Ki > Kf No Current Mode? No No Vi < Vd Yes Ki < Kd Force Yes 50 0 -50 -6 -4 -2 Displ. Control Mixed Formulation 0 2 4 Measured displacement [in] Energy disspated [kips.in] Measured force [kips] Figure 13. Newly developed mixed formulation for hybrid simulations 250 200 150 100 50 0 0 5 Displ. Control Mixed Formulation 10 15 Time [sec] (a) Force-deformation relationship (b) Energy time history Figure 14. Comparison between displacement control and the newly developed mixed formulation Publications 1. Hashemi, A. and Mosalam, K.M. “Transient analysis of reinforced concrete frame with and without masonry infill wall under blast,” Emirates Journal for Engineering Research, 9(2), 97-103, 2004. 2. Hashemi, A. and Mosalam, K.M. “Shake-table experiment on one-story RC structure with and without masonry infill”, NATO workshop: Seismic Assessment and Rehabilitation of Existing Buildings, May30-June 1, 2005, Istanbul, Turkey. 3. Elkhoraibi T. and Mosalam K.M. “Pseudo-dynamic experiment on one-story RC structure with and without masonry infill”, Proceedings of the 100th Anniversary Earthquake Conference Commemorating the 1906 San Francisco Earthquake, April 18-22, 2006. 4. Hashemi, A., Elkhoraibi, T. and Mosalam, K.M. “Dynamic and pseudo-dynamic evaluation of RC structure containing masonry infill”, Proceedings of the Modern Problems and Directions of Mechanics Conference, May 17-18, 2006, Tashkent, Uzbekistan. 5. Hashemi, A. and Mosalam, K.M. “Shake-table experiment on reinforced concrete structure containing masonry infill wall”, Earthquake Engineering and Structural Dynamics, Vol. 35, No. 14, 1827-1852, 2006. 6. Hashemi, A. "Seismic evaluation of reinforced concrete buildings including effects of masonry infill walls", PhD dissertation, UC-Berkeley, Spring 2007. 7. Elkhoraibi T. “Generalized hybrid simulation framework for structural systems subjected to seismic loading,” PhD dissertation, UC-Berkeley, Spring 2007. 8. Elkhoraibi T. and Mosalam K.M. “Towards error-free hybrid simulation using mixed variables,” Earthquake Engineering and Structural Dynamics, Vol. 36, No. 11, 14971522, 2007. 9. Hashemi, A. and Mosalam, K.M., “Towards generalized fragility functions of RC frame structures containing URM infill walls,” Proc. Tenth International Conference on Applications of Statistics and Probability in Civil Engineering, ICASP10, Kashiwa Campus, The University of Tokyo, Tokyo, Japan, 2007. 10. Hashemi, A. and Mosalam, K.M., “Seismic evaluation of reinforced concrete buildings including effects of masonry infill walls,” PEER Technical Report 2007/100, 2007. 11. Elkhoraibi, T. and Mosalam, K.M., “Generalized hybrid simulation framework for structural systems subjected to seismic loading,” PEER Technical Report 2007/101, 2007.