Chapter 4 Kinematics In Two Dimensions
advertisement

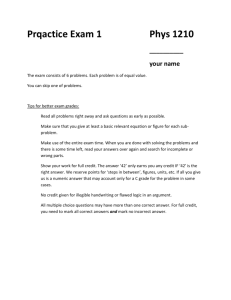
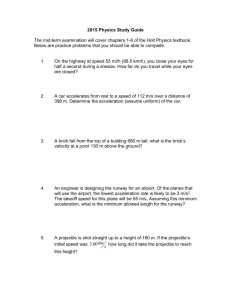
Chapter 4 Kinematics In Two Dimensions 4.1 The Kinematic Equations in Vector Form In chapter 2 we discussed motion in one dimension only. And although the displacement, velocity, and acceleration of a body are vector quantities, we did not write them in the traditional boldface type, characteristic of vectors. We took into account their vector character by noting that when the displacement, velocity, and acceleration were in the positive x- or y-direction, we considered the quantities positive. When the displacement, velocity, and acceleration were in the negative xor y-direction, we considered those quantities negative. For two-dimensional motion we must be more general and write the displacement, velocity, and acceleration in boldface type to show their full vector character. Let us now define the kinematic equations in terms of their vector characteristics. The average velocity of a body is defined as the rate at which the displacement vector changes with time. That is, vavg = ∆r = r2 − r1 (4.1) ∆t t2 − t1 where the letter r is the displacement vector. The displacement vector r1 locates the position of the body at the time t1, while the displacement vector r2 locates the position of the body at the time t2. The displacement between the times t1 and t2 is just the difference between these vectors, r2 − r1, or ∆r, and is shown in figure 4.1. Figure 4.1 The change in the displacement vector. We find the instantaneous velocity by taking the limit in equation 4.1 as ∆t approaches zero, just as we did in equation 2.9. Hence the instantaneous velocity in vector form is given by ∆r dr (4.2) = = v lim ∆t →0 ∆t dt Chapter 4 Kinematics In Two Dimensions The magnitude of the instantaneous velocity vector is the instantaneous speed of the body, while the direction of the velocity vector is the direction that the body is moving, which is tangent to the trajectory at that point. The average acceleration vector is defined as the rate at which the velocity vector changes with time: a = ∆v = v − v0 (4.3) ∆t t For motion at constant acceleration the average acceleration is the same as the instantaneous acceleration and we will not use the subscript avg on a. However, the general definition of the instantaneous acceleration in vector notation is given as an extension of equation 4.3 as ∆v dv (4.4) = a lim = ∆t →0 ∆t dt We find the kinematic equation for the displacement and velocity of the at any instant of time as in section 2.6, only we write every term except t vector: r = v0t + 1 at2 2 and v = v0 + at body as a (4.5) (4.6) Equation 4.5 represents the vector displacement of the moving body at any time t, while equation 4.6 represents the velocity of the moving body at any time. These vector equations are used to describe the motion of a moving body in two or three directions. 4.2 Projectile Motion in Two Dimensions In the study of kinematics we found that the displacement and velocity of a moving body can be determined if the original velocity v0 of the body and the acceleration a acting on it are known. The displacement of the body was given by while its velocity was given by r = v0t + 1 at2 2 (4.5) v = v0 + at (4.6) These two equations completely describe the resulting motion of the body. As an example of two-dimensional kinematics let us study the motion of a projectile in two dimensions. A projectile is thrown from the point 0 in figure 4.2 with an initial velocity v0. The trajectory of the projectile is shown in the figure. 4-2 Chapter 4 Kinematics In Two Dimensions (a) Two dimensional projectile motion. (b) Stroboscopic photograph of a projectile in two dimensions. Figure 4.2 The trajectory of a projectile in two dimensions. Figure 4.3 A punted football is an example of a projectile in two dimensions. The location of the projectile at any instant of time is given by equation 4.5 and is shown as the displacement vector r in figure 4.2. We resolve the displacement vector r into two components: the distance the projectile has moved in the x-direction, we designate as x; the distance (or height) the projectile has moved 4-3 Chapter 4 Kinematics In Two Dimensions in the y-direction we designate as y. The displacement vector r for two-dimensional motion can then be written in terms of the unit vectors as r = ix + jy The initial velocity v0 also has two components: v0x, velocity, and v0y, the y-component. Figure 4.2 shows the original velocity, given by v0x = v0 cos θ, while original velocity, v0y = v0 sin θ. The initial velocity v0 vectors as v0 = iv0x + jv0y (4.7) the x-component of the initial that v0x is the x-component of v0y is the y-component of the is written in terms of the unit (4.8) The acceleration vector a in equation 4.5 could also have two components: ax, the xcomponent of the acceleration, and ay, the y-component. Hence the acceleration vector a can also be written in terms of the unit vectors as Equation 4.5 can now be written as a = iax + jay r = v0t + 1 at2 2 ix + jy = (iv0x + jv0y)t + 1 (iax + jay)t2 2 (4.9) (4.10) If we take the dot product of the unit vector i with equation 4.10 we get i(ix + jy) = i(iv0x + jv0y)t + 1 i(iax + jay)t2 2 Since all ii = 1 and all ij = 0, only the x-components will be nonzero and we get the equation for the x-component of the displacement to be x = v0x t + 1 axt2 2 (4.11) Similarly, if we take the dot product of the unit vector j with equation 4.10 we get j(ix + jy) = j(iv0x + jv0y)t + 1 j(iax + jay)t2 2 In this case all jj = 1 and all ji = 0. Hence only the y-components will now be nonzero and we get the equation for the y-component of the displacement to be y = v0yt + 1 ayt2 2 4-4 (4.12) Chapter 4 Kinematics In Two Dimensions In chapter 5 on Newton’s laws of motion, we will see that whenever an unbalanced force F acts on a body of mass m, it gives that mass an acceleration a. Because there is no force acting on the projectile in the horizontal x-direction, the acceleration in the x-direction must be zero, that is, ax = 0 There is, however, a force acting on the projectile in the y-direction, the force of gravity that the earth exerts on any object, directed toward the center of the earth. We define the direction of this gravitational force to be in the negative ydirection. This gravitational force produces a constant acceleration called the acceleration due to gravity g. Hence, the y-component of the acceleration of the projectile is given by −g, that is, ay = −g Therefore, the x-component of the displacement r of the projectile, equation 4.11, takes the simple form (4.13) x = v0xt and the y-component of the displacement of the projectile, equation 4.12, becomes y = v0yt − 1 gt2 2 (4.14) Noting that the velocity vector v can be written as v = ivx + jvy (4.15) we apply the same arguments to equation 4.6, as above, namely v = v0 + at i v = i v0 + i at i (ivx + jvy) = i (iv0x + jv0y) + i (iax + jay)t Since all ii = 1 and all ij = 0, only the x-components will be nonzero and we get the equation for the x-component of the velocity to be Similarly, for the y-component we get vx = v0x + axt j v = j v0 + j at j (ivx + jvy) = j (iv0x + jv0y) + j (iax + jay)t 4-5 (4.16) Chapter 4 Kinematics In Two Dimensions In this case all jj = 1 and all ji = 0, only the y-components will now be nonzero and we get the equation for the y-component of the velocity to be vy = v0y + ayt (4.17) However since ax = 0, and ay = −g, equations 4.16 and 4.17 become vx = v0x (4.18) vy = v0y − gt (4.19) Equation 4.18 gives the x-component of the velocity vx. Note that it does not contain the time t, and therefore is independent of time and is a constant. Equation 4.19 gives the y-component of the velocity vy, at any time t. These two equations show that the projectile motion consists of two motions: accelerated motion in the ydirection and motion at constant velocity in the x-direction. We can completely describe the motion of the projectile using the four equations, namely, (4.13) x = v0xt (4.14) y = v0yt − 1 gt2 2 (4.18) vx = v0x (4.19) vy = v0y − gt Now let us apply these equations to the projectile motion shown in figure 4.2. We essentially look for the same information that we found for projectile motion in one dimension. Because two-dimensional motion is a superposition of accelerated motion in the y-direction coupled to motion in the x-direction at constant velocity, we can use many of the techniques and much of the information we found in the one-dimensional case. Let us find (1) the time for the projectile to rise to its maximum height, (2) the total time that the projectile is in the air, (3) the range (or maximum distance in the x-direction) of the projectile, (4) the maximum height of the projectile, (5) the velocity of the projectile as it strikes the ground, and (6) the location and velocity of the projectile at any time t. To determine this information we use the kinematic equations 4.13 through 4.19. The Time for the Projectile to Rise to Its Maximum Height To determine the maximum height of the projectile we use the same reasoning used for the one-dimensional case. As the projectile is moving upward it has some positive vertical velocity vy. When it is coming down it has some negative vertical velocity −vy. At the very top of the trajectory, vy = 0. Therefore, at the top of the trajectory, equation 4.19 becomes 4-6 Chapter 4 Kinematics In Two Dimensions 0 = v0y − gtr (4.20) Note that this is very similar to the equation for the one-dimensional case, except for the subscript y on v0. This is an important distinction between the two motions, because the initial velocity upward v0y is now less than the initial velocity upward v0 in the one-dimensional case. Solving equation 4.20 for the time to rise to the top of the trajectory tr, we get (4.21) tr = v0y g Since we know v0 and hence v0y, and because g is a constant, we can immediately compute tr. The Total Time the Projectile Is in the Air To find the total time that the projectile is in the air, we use equation 4.14. When t is the total time tt, the projectile is back on the ground and the height of the projectile is zero, y = 0. Therefore, 0 = v0ytt − 1 gtt2 2 Solving for the total time that the projectile is in the air, we get tt = 2v0y g (4.22) But using equation 4.21 for the time to rise, tr = v0y/g, the total time that the projectile is in the air is exactly double this value, tt = 2v0y = 2tr g (4.23) which is the same as the one-dimensional case, as expected. The Range of the Projectile The range of a projectile is defined as the horizontal distance from the point where the projectile is launched to the point where it returns to its launch height. In this case, the range is the maximum distance that the projectile moves in the xdirection before it hits the ground. Because the maximum horizontal distance is the product of the horizontal velocity, which is a constant, and the total time of flight, the range, becomes range = R = xmax = v0xtt (4.24) 4-7 Chapter 4 Kinematics In Two Dimensions Sometimes it is convenient to express the range in another way. Since v0x = v0 cos θ, and the total time in the air is tt = 2v0y = 2v0 sin θ g g we substitute these values into equation 4.24 to obtain R = (v0 cos θ)(2v0 sin θ) = v02 2 sin θ cos θ g g However, using the well-known trigonometric identity, 2 sin θ cos θ = sin 2θ the range of the projectile becomes R = v02 sin 2θ g (4.25) We derived equation 4.25 based on the assumption that the initial and final elevations are the same, and we can use it only in problems where this assumption holds. This formulation of the range is particularly useful when we want to know at what angle a projectile should be fired in order to get the maximum possible range. From equation 4.25 we can see that for a given initial velocity v0, the maximum range depends on the sine function. Because the sine function varies between −1 and +1, the maximum value occurs when sin 2θ = 1. But this happens when 2θ = 900, hence the maximum range occurs when θ = 450. We obtain the maximum range of a projectile by firing it at an angle of 450. The Maximum Height of the Projectile We can find the maximum height of the projectile by substituting the time tr into equation 4.14 and solving for the maximum height. However, since it is useful to have an equation for vertical velocity as a function of the height, we will use an alternate solution. Equation 4.14 represents the y-component of the displacement of the projectile at any instant of time and equation 4.19 is the y-component of the velocity at any instant of time. If the time is eliminated between these two equations (exactly as it was in section 2.6, for equation 2.16), we obtain the kinematic equation vy2 = v0y2 − 2gy (4.26) which gives the y-component of the velocity of the moving body at any height y. When the projectile has reached its maximum height, vy = 0. Therefore, equation 4.26 becomes 0 = v0y2 − 2gymax Solving for ymax we obtain 4-8 Chapter 4 Kinematics In Two Dimensions ymax = v0y2 2g the maximum height of the projectile. (4.27) The Velocity of the Projectile as It Strikes the Ground The velocity of the projectile as it hits the ground vg can be described in terms of its components, as shown in figure 4.4. The x-component of the velocity at the ground, Figure 4.4 The velocity of the projectile at the ground. found from equation 4.18, is vxg = vx = v0x (4.28) The y-component of the velocity at the ground, found from equation 4.28 with t = tt is (4.29) vyg = v0y − gtt = v0y − g(2v0y) g vyg = −v0y (4.30) The y-component of the velocity of the projectile at the ground is equal to the negative of the y-component of the original velocity. The minus sign just indicates that the projectile is coming down. But this is exactly what we expected from the study of one-dimensional motion. The magnitude of the actual velocity at the ground, found from its two components, is v g = (v xg ) 2 + (v yg ) 2 (4.31) and using equations 4.28 and 4.30, becomes v g = (v 0x ) 2 + (−v 0y ) 2 = v 0 (4.32) The speed of the projectile as it strikes the ground is equal to the original speed of the projectile. The direction that the velocity vector makes with the ground is 4-9 Chapter 4 Kinematics In Two Dimensions θ = tan−1 vyg = tan−1 −v0y = −θ vxg v0x The angle that the velocity vector makes as it hits the ground is the negative of the original angle. That is, if the projectile was fired at an original angle of 300 above the positive x-axis, it will make an angle of 300 below the positive x-axis when it hits the ground. The Location and Velocity of the Projectile at Any Time t We find the position and velocity of the projectile at any time t by substituting that value of t into equations 4.13, 4.14, 4.18, and 4.19. Let us look at some examples of projectile motion. Example 4.1 Projectile motion in two dimensions. A ball is thrown with an initial velocity of 30.0 m/s at an angle of 60.00 above the horizontal, as shown in figure 4.5. Find (a) the maximum height of the ball, (b) the time to rise to the top of the trajectory, (c) the total time the ball is in the air, (d) the range of the ball, (e) the velocity of the ball as it strikes the ground, and (f) the position and velocity of the ball at t = 4 s. Figure 4.5 Trajectory of a thrown ball. Solution The x-component of the initial velocity is v0x = v0 cos θ = (30.0 m/s) cos 600 = 15.0 m/s The y-component of the initial velocity is v0y = v0 sin θ = (30.0 m/s) sin 60.00 = 26.0 m/s a. The maximum height of the ball, found from equation 4.27, is 4-10 Chapter 4 Kinematics In Two Dimensions ymax = v0y2 = (26.0 m/s)2 = 34.5 m 2g 2(9.80 m/s2) b. To find the time to rise to the top of the trajectory, we use equation 4.21, tr = v0y = 26.0 m/s = 2.65 s g 9.80 m/s2 c. To find the total time that the ball is in the air, we use equation 4.23, tt = 2tr = 2(2.65 s) = 5.30 s d. The range of the ball, found from equation 4.25, is R = v02 sin 2θ = (30.0 m/s)2 sin 1200 = 79.5 m g 9.80 m/s2 As a check, we can use equation 4.24 to get R = xmax = v0xtt = (15.0 m/s)(5.30 s) = 79.5 m e. To find the magnitude of the velocity of the ball at the ground, we use equation 4.31, v g = (v xg ) 2 + (v yg ) 2 where vxg = v0x = 15.0 m/s and vyg = v0y − gtt = 26.0 m/s − (9.80 m/s2)(5.30 s) = 26.0 m/s − 51.9 m/s = −25.9 m/s Hence, v g = (15.0 m/s) 2 + (−25.9 m/s) 2 = 29.9 m/s ≅ 30.0 m/s because of round off errors The direction that the velocity vector makes with the ground is θ = tan−1vyg = tan−1 −25.9 m/s = −59.90 ≅ − 60.00 vxg 15.0 m/s f. To find the position and velocity of the ball at t = 4 s we use the kinematic equations 4.13 through 4.19. 1. x = v0xt = (15.0 m/s)(4 s) = 60.0 m 4-11 Chapter 4 Kinematics In Two Dimensions 2. y = v0yt − 1 gt2 2 = (26.0 m/s)(4 s) − 1 (9.80 m/s2)(4 s)2 2 = 25.6 m The ball is 60.0 m down range and is 25.6 m high. The components of the velocity at 4 s are 3. vx = v0x = 15.0 m/s 4. vy = v0y − gt = 26.0 m/s − (9.80 m/s2)(4 s) = −13.2 m/s At the end of 4 s the x-component of the velocity is 15.0 m/s and the y-component is −13.2 m/s. To determine the magnitude of the velocity vector at 4 s we have v = (v x ) 2 + (v y ) 2 v = (15.0 m/s) 2 + (−13.2 m/s) 2 = 20.0 m/s The direction of the velocity vector at 4 s is θ = tan−1vyg = tan−1 −13.2 m/s = −41.30 vxg 15.0 m/s The velocity vector makes an angle of 41.30 below the horizontal at 4 s. To go to this Interactive Example click on this sentence. Example 4.2 A projectile is fired horizontally from the roof of a building. A projectile is fired horizontally from the roof of a building 30.0 m high at an initial velocity of 20.0 m/s, as shown in figure 4.6. Find (a) the total time the projectile is in the air, (b) where the projectile will hit the ground, and (c) the velocity of the projectile as it hits the ground. Solution 4-12 Chapter 4 Kinematics In Two Dimensions Figure 4.6 Trajectory of projectile thrown horizontally. The x- and y-components of the velocity are v0x = v0 = 20.0 m/s v0y = 0 a. To find the total time that the projectile is in the air, we use equation 4.14, y = v0yt − 1 gt2 2 However, the initial conditions are that v0y = 0. Therefore, y = − 1 gt2 2 Solving for t, t= −2y g However, when t = tt, y = −30.0 m. Hence, tt = −2(−30.0 m ) 9.80 m/s 2 = 2.47 s −2y g = b. To find where the projectile hits the ground, we use equation 4.13, x = v0xt Now the projectile hits the ground when t = tt, therefore, x = v0xtt = (20.0 m/s)(2.47 s) = 49.4 m 4-13 Chapter 4 Kinematics In Two Dimensions The projectile hits the ground at the location y = −30.0 m and x = 49.4 m. c. To find the velocity of the projectile at the ground we use equations 4.28, 4.29, and 4.31: vxg = v0x = v0 = 20.0 m/s vyg = v0y − gtt = 0 − (9.80 m/s2)(2.47 s) = −24.2 m/s v g = (v xg ) 2 + (v yg ) 2 v = (20.0 m/s) 2 + (−24.2 m/s) 2 = 31.4 m/s The direction that the velocity vector makes with the ground is θ = tan−1vyg = tan−1 −24.2 m/s = −50.40 vxg 20.0 m/s The velocity vector makes an angle of 50.40 below the horizontal when the projectile hits the ground. To go to this Interactive Example click on this sentence. Example 4.3 A projectile is fired at an angle from the roof of a building. A projectile is fired at an initial velocity of 35.0 m/s at an angle of 30.00 above the horizontal from the roof of a building 30.0 m high, as shown in figure 4.7. Find (a) the maximum height of the Figure 4.7 Trajectory of a projectile fired from the roof of a building. 4-14 Chapter 4 Kinematics In Two Dimensions projectile, (b) the time to rise to the top of the trajectory, (c) the total time that the projectile is in the air, (d) the velocity of the projectile at the ground, and (e) the range of the projectile. Solution The x- and y-components of the original velocity are v0x = v0 cos θ = (35.0 m/s) cos 300 = 30.3 m/s v0y = v0 sin θ = (35.0 m/s) sin 300 = 17.5 m/s a. To find the maximum height we use equation 4.27: ymax = v0y2 = (17.5 m/s)2 = 15.6 m 2g 2(9.80 m/s2) above the building. Since the building is 30 m high, the maximum height with respect to the ground is 45.6 m. b. To find the time to rise to the top of the trajectory we use equation 4.21: tr = v0y = 17.5 m/s = 1.79 s g 9.80 m/s2 c. To find the total time the projectile is in the air we use equation 4.23: y = v0yt − 1 gt2 2 When t = tt, y = −30.0 m. Therefore, −30.0 m = (17.5 m/s)tt − 1 (9.80 m/s2)tt2 2 Rearranging the equation, we get 4.90 tt2 − 17.5 tt − 30.0 = 0 The units have been temporarily left out of the equation to simplify the following calculations. This is a quadratic equation of the form with the solution ax2 + bx + c = 0 (4.33) −b ± b2 − 4ac x= 2a (4.34) 4-15 Chapter 4 Kinematics In Two Dimensions In this problem, x = tt, a = 4.90, b = −17.5, and c = −30.0. Therefore, tt = (17.5 ) +17.5 ± 2 − 4 ( 4.90 )( −30.0 ) 2(4.90) = +17.5 29.9 9.80 = 4.84 s The total time that the projectile is in the air is 4.84 s. If we had solved the equation for the negative root, we would have found a time of −1.27 s. This corresponds to a time when the height is −30.0 meters but it is a time before the projectile was thrown. If the projectile had been thrown from the ground it would have taken 1.27 seconds to reach the roof. d. To find the velocity of the projectile at the ground we use equations 4.28, 4.29, and 4.31: vxg = v0x = 30.3 m/s vyg = v0y − gtt = 17.5 m/s − (9.80 m/s2)(4.84 s) = −29.9 m/s = vg = vg (v ) + (v ) 2 xg (30.3 m/s ) 2 yg 2 + ( −29.9 m/s ) 2 = 42.6 m/s The speed of the projectile as it strikes the ground is 42.6 m/s. The angle that the velocity vector makes with the ground, found from figure 4.8, is Figure 4.8 Angle of velocity vector as it strikes the ground. tan φ = vyg vxg 4-16 Chapter 4 Kinematics In Two Dimensions v −29.9 −1 yg tan −1 ϕ tan = = vxg 30.3 = −44.60 The velocity vector makes an angle of 44.60 below the horizontal when the projectile hits the ground. e. To find the range of the projectile we use equation 4.24: xmax = v0xtt = (30.3 m/s)(4.84 s) = 147 m To go to this Interactive Example click on this sentence. Example 4.4 The time for the projectile to be at a certain position. A projectile is fired at an initial velocity of 30.0 m/s at an angle of 65.00 above the horizontal from the roof of a building 40.0 m high, as shown in figure 4.7. Find (a) the time when the projectile is at a height of 15.0 m above the top of the building, (b) the value of the x-coordinate at this time, (c) the x-component of the velocity of the projectile at this time, and (d) the y-component of the velocity of the projectile at this time. Solution The x- and y-components of the original velocity are v0x = v0 cos θ = (30.0 m/s) cos 650 = 12.7 m/s v0y = v0 sin θ = (30.0 m/s) sin 650 = 27.2 m/s a. The height of the projectile at any instant of time is given by equation 4.14: Rearranging the equation, we get y = v0yt − 1 gt2 2 1 gt2 − v0yt + y = 0 2 which is of the form of the quadratic equation with the solution ax2 + bx + c = 0 4-17 Chapter 4 Kinematics In Two Dimensions x= −b ± b2 − 4ac 2a In this problem, x = t, a = g/2, b = −voy, and c = y. Therefore, tt = + voy ± ( −v ) 2 − 4 ( g / 2) y oy 2( g / 2) or tt = + voy ± voy 2 − 2 gy (4.35) g gives the time t that the projectile is at the height y. tt = +27.2 ± ( 27.2 m/s ) 2 ( ) − 2 9.80 m/s2 (15.0 m ) 9.80 m/s2 t = +27.2 21.1 9.80 Because this is a quadratic equation, there are two roots or solutions to the equation. The first solution occurs for the negative root and gives t− = 0.622 s That is, it will take 0.622 s for the projectile to rise to a height of 15.0 m. The second solution occurs for the positive root and gives t+ = 4.93 s This is the time it takes for the projectile to rise to its maximum height and then descend until it is 15.0 m above the top of the building on its way down. Thus, the negative root gives the time it takes for the projectile to rise to the given height and the positive root gives the time it takes for the projectile to be at that same height but now it is on its way down. b. Because of the two roots of the quadratic equation, there will be two values of x associated with the times. The first value of x corresponds to the negative root t− when the projectile is on its way up. That is x = v0x t− = (12.7 m/s)(0.622 s) = 7.90 m 4-18 Chapter 4 Kinematics In Two Dimensions The second value of x corresponds to the time t+ when the projectile is on its way down, i.e., x = v0x t+ = (12.7 m/s)(4.93 s) = 62.6 m c. The value of the x-component of the velocity is a constant and is given by for all values of time. vx = v0x = 12.7 m/s d. The value of the y-component of the velocity is given by the kinematic equation vy = v0y - gt The first value of vy corresponds to the negative root t− when the projectile is on its way up and is found as vy = v0y − gt− = 27.2 m/s −(9.80 m/s2)(0.622 s) = 21.1 m/s The second value of vy corresponds to the time t+ when the projectile is on its way down, i.e., vy = v0y − gt+ = 27.2 m/s −(9.80 m/s2)(4.93 s) = − 21.1 m/s To go to this Interactive Example click on this sentence. 4.3 The Calculus and Kinematics in Two Dimensions The use of the calculus in kinematics in two-dimensional motion is essentially the same as for one-dimensional motion except that the displacement, velocity, and acceleration are now represented in bold face vector notation. We start with the definition of the acceleration of the moving body a = dv dt (4.36) dv = adt (4.37) and rewrite it in the following form Let us now integrate equation 4.37 ∫ v v0 t dv = ∫ adt 0 (4.38) At the beginning of the motion the time is t = 0 and this becomes the lower limit in the second integral. At this same time the velocity of the moving body is v0, which 4-19 Chapter 4 Kinematics In Two Dimensions becomes the lower limit in the first integral. At the later time t, the upper limit in the second integral, the velocity of the moving body is v, which becomes the upper limit in the first integral. Evaluating the integral on the left we obtain ∫ v v0 and equation 4.38 becomes dv= v − v0 t v − v0 = ∫ adt 0 (4.39) (4.40) In general the acceleration term a in equation 4.40 could vary with time. If it does we would have to know that functional relation before we can solve equation 4.40. On the other hand, if the acceleration of the moving body is a constant, then it can be taken out from under the integral sign to obtain v − v0= ∫ t 0 t adt= a ∫ dt= at 0 v − v 0 = at or v = v 0 + at (4.41) Equation 4.41 gives the velocity of the moving body at any instant of time, when the acceleration of the body is a constant. Notice that this is the same equation we obtained in equation 4.6. The velocity at any time was given by equation 4.2 as v = dr dt Setting equation 4.2 equal to equation 4.41 gives which becomes Upon integrating v = dr = v 0 + at dt dr = (v 0 + at)dt dr ∫ ( v ∫= r t r0 0 0 + at ) dt At the time t = 0, the lower limit in the second integral, the displacement of the moving body is r0, which becomes the lower limit in the first integral. At the time t = t, the upper limit in the second integral, the displacement of the moving body is r, which becomes the upper limit in the first integral. Separating the two terms on the right into two separate integrals we get 4-20 Chapter 4 Kinematics In Two Dimensions r = ∫ dr ∫ r0 t 0 t v 0 dt + ∫ atdt 0 Since v0 and a are constant they come out of the integral sign to yield or r − r0 = v 0 ∫ dt + a ∫ tdt = v 0t + 12 at 2 (4.42) r = r 0 + v 0 t + 12 at 2 (4.43) t t 0 0 Equation 4.43 gives the displacement r of the moving body at any instant of time for a body that is undergoing constant acceleration. Equation 4.43 looks like equation 4.5 except for the term r0, which represents the position of the moving body at the time t = 0. In our derivation of equation 4.5, we assumed that the body was at the origin of our reference system and hence r0 = 0 in that equation. Equation 4.43 is more general in that it allows for the moving body to be at some place other than the origin at t = 0. In summary equation 4.41 gives the velocity of the moving body at any time t while equation 4.43 gives the displacement of the moving body at any time t. v = v 0 + at r = r 0 + v 0 t + 12 at 2 (4.41) (4.43) Both equations are vector equations and the x- and y-component equations can be obtained by dot multiplying each equation by i and j respectively, as we did in equations 4.10 through 4.17, to yield x = x0 + v0xt + 1 axt2 2 y = y0 + v0yt + 1 ayt2 2 vx = v0x + axt vy = v0y + ayt (4.44) (4.45) (4.46) (4.47) The terms x0 and y0 represent the initial coordinates of the body at the time t = 0. In most of the analysis we did so far we assumed that the moving body was at the origin of the coordinate system at the time t = 0 and therefore we set x0 = 0 and y0 = 0 and they were not in our kinematic equations. For the case of projectile motion we can let ax = 0 and ay = −g and we then obtain the equations for projectile motion 4.13, 4.14, 4.18, and 4.19. It should now be obvious that the kinematic equations, 4.44 through 4.47, hold only for motion at constant acceleration. Fortunately, most of the physical problems that we will encounter in this course will be for motion at constant acceleration and the standard form of the kinematic equations can be used. For 4-21 Chapter 4 Kinematics In Two Dimensions those cases where the acceleration is variable, the procedure above must be followed. Hence using the calculus will allow us to solve more general and sometimes more difficult problems. 4.4 Uniform Circular Motion Uniform circular motion is defined as motion in a circle at constant speed. Motion in a circle with changing speeds will be discussed later in this chapter. A car moving in a circle at the constant speed of 20 km/hr is an example of a body in uniform circular motion. At every point on that circle the car would be moving at 20 km/hr. This type of motion is shown in figure 4.9. At the time t0, the car is located at the point A and is moving with the velocity v0, which is tangent to the circle at that point. At a later time t, the car will have moved through the angle θ, and will be located at the point B. At the point B the car has a velocity v, which is tangent to the circle at B. (The velocity is always tangent to the circle, because at any instant the tangent specifies the direction of motion.) The lengths of the two vectors, v and v0, are the same because the magnitude of any vector is represented as the length of that vector. The magnitude of the velocity is the speed, which is a constant for uniform circular motion. (a) (b) Figure 4.9 Uniform circular motion. The first thing we observe in figure 4.9 is that the direction of the velocity vector has changed in going from the point A to the point B. Recall from equation 4.36, that the acceleration is defined as the change in velocity with time, that is, a = dv dt 4-22 (4.36) Chapter 4 Kinematics In Two Dimensions Even though the speed is a constant in uniform circular motion, the direction is always changing with time. Hence, the velocity is changing with time, and there must be an acceleration. Thus, motion in a circle at constant speed is accelerated motion. We must now determine the direction of this acceleration and its magnitude. 4.5 Centripetal Acceleration and its Direction To determine the direction of the centripetal acceleration, let us start by moving the vector v, located at the point B in figure 4.9, parallel to itself to the point A, as shown in figure 4.10. The difference between the two velocity vectors is v − v0 and points approximately toward the center of the circle in the direction shown. But this difference between the velocity vectors is the change in the velocity vector ∆v, that Figure 4.10 The direction of the centripetal acceleration. is, But from equation 4.3 ∆v = v − v0 ∆v = a∆t This is a vector equation, and whatever direction the left-hand side of the equation has, the right-hand side must have the same direction. Therefore, the vector ∆v points in the same direction as the acceleration vector a. Observe from figure 4.10 that ∆v points approximately toward the center of the circle. In the limit, if the angle θ, between the points A and B, were made very small, approaching zero, then ∆v would become dv and would point exactly at the center of the circle. Then dv = adt 4-23 Chapter 4 Kinematics In Two Dimensions Thus, since dv points toward the center, the acceleration vector a must also point toward the center of the circle. This is the characteristic of uniform circular motion. Even though the body is moving at constant speed, there is an acceleration and the acceleration vector points toward the center of the circle. This acceleration is called the centripetal acceleration. The word centripetal means “center seeking” or seeking the center. If this circular motion were shown at intervals of 450, we would obtain the picture shown in figure 4.11. Observe in figure 4.11 that no matter where the body is on the circle, the centripetal acceleration always points toward the center of the circle. What is the magnitude of this acceleration? The problem of calculating accelerations of objects moving in circles at constant speed was first solved by Christian Huygens (1629-1695) in 1673, and his solution is effectively the same one that we use today. The argument is basically a geometric one. However, before the magnitude of the centripetal acceleration can be determined, we need first to determine how an angle is defined in terms of radian measure. Figure 4.11 The centripetal acceleration always points toward the center of the circle. 4.6 Angles Measured in Radians In addition to the usual unit of degrees used to measure an angle, an angle can also be measured in another unit called a radian. As the body moves along the arc s of the circle from point A to point B in figure 4.12, it sweeps out an angle θ in the time t. This angle θ, measured in radians (abbreviated rad), is defined as the ratio of the arc length s traversed to the radius of the circle r. That is, 4-24 Chapter 4 Kinematics In Two Dimensions Figure 4.12 Definition of an angle expressed in radians. θ = s = arc length r radius (4.48) Thus an angle of 1 radian is an angle swept out such that the distance s, traversed along the arc, is equal to the radius of the circle: θ = s = r = 1 rad r r Notice that a radian is a dimensionless quantity. If s is measured in meters and r is measured in meters, then the ratio yields units of meters over meters and the units will thus cancel. For an entire rotation around the circle, that is, for one revolution, the arc subtended is the circumference of the circle, 2πr. Therefore, an angle of one revolution, measured in radians, becomes θ = s = 2πr = 2π rad r r That is, one revolution is equal to 2π rad. The relationship between an angle measured in degrees, and one measured in radians can be found from the fact that one revolution is also equal to 360 degrees. Thus, and solving for a radian, we get Similarly, 1 rev = 2π rad = 3600 1 rad = 3600 = 57.2960 2π 1 degree = 0.01745 rad 4-25 Chapter 4 Kinematics In Two Dimensions In almost all problems in circular motion the angles will be measured in radians. The relationship between the arc length s and the angle θ, measured in radians, for circular motion, found from equation 4.48, is s = rθ (4.49) 4.7 The Magnitude of the Centripetal Acceleration Having determined the relation between the arc length s and the angle θ swept out, we can now determine the magnitude of the centripetal acceleration. In moving at the constant speed v, along the arc of the circle from A to B in figure 4.10, the body has traveled the distance s = vt (4.50) But in this same time t, the angle θ has been swept out in moving the distance s along the arc. If the distance s moved along the arc from equations 4.49 and 4.50 are equated, we have rθ = vt Solving for θ, we obtain θ = vt (4.51) r This is the angle θ swept out in the uniform circular motion, in terms of the speed v, time t, and the radius r of the circle. We will return to equation 4.51 in a moment, but first let us look at the way that these velocity vectors are changing with time. As we see in figure 4.11, the velocity vector v points in a different direction at every instant of time. Let us slide each velocity vector in figure 4.11 parallel to itself to a common point. If we draw a curve connecting the tips of each velocity vector, we obtain the circle shown in figure 4.13. That is, since the magnitude of the velocity vector is a constant, a circle of radius v is generated. As the object moves from A to B and sweeps out the angle θ in figure 4.10, the velocity vector also moves through the same angle θ, figure 4.13. To prove this, notice that the velocity vectors v0 at A and v at B are each tangent to the circle there, figure 4.14. In moving through the angle θ in going from A to B, the velocity vector turns through this same angle θ. This is easily seen in figure 4.14. The angle α is while the angle β is α= π − θ 2 (4.52) β= π −α 2 (4.53) 4-26 Chapter 4 Kinematics In Two Dimensions Figure 4.13 The velocity circle. Figure 4.14 The angle between the velocity vectors v and v0 is the same as the angle θ swept out in moving from point A to point B. Substituting equation 4.52 into equation 4.53 gives = − − 2 2 Hence, β , the angle between v and v0 in figure 4.14, is β=θ Thus, the angle between the velocity vectors v and v0 is the same as the angle θ swept out in moving from point A to point B. 4-27 Chapter 4 Kinematics In Two Dimensions Therefore, in moving along the velocity circle in figure 4.13, an amount of arc s’ is swept out with the angle θ. This velocity circle has a radius of v, the constant speed in the circle. Using equation 4.48, as it applies to the velocity circle, we have θ = arc length = s’ radius v (4.54) If the angle θ is relatively small, then the arc of the circle s’ is approximately equal to the chord of the circle |v − v0| in figure 4.13. 1 That is, arc ≈ chord s’ ≈ |v − v0|= |a|t In the limit θ → 0 the arc will become equal to the chord, that is lim s ' =v − v0 =at hence, θ →0 s’ = at Substituting this result into equation 4.54 gives θ = at v (4.55) Thus we have obtained a second relation for the angle θ swept out, expressed now in terms of acceleration, speed, and time. Return to equation 4.51, which gave us the angle θ swept out as the moving body went from point A to point B along the circular path, and compare it to equation 4.55, which gives the angle θ swept out in the velocity circle. Because both angles θ are equal, equation 4.55 can now be equated to equation 4.51, giving θ=θ at = vt v r Solving for the acceleration we obtain a = v2 r Placing a subscript c on the acceleration to remind us that this is the centripetal acceleration, we then have Note that |v − v0| is the magnitude of the difference in the velocity vectors and is the straight line between the tip of the velocity vector v0 and the tip of the velocity vector v, and as such, is equal to the chord of the circle in figure 4.13. 1 4-28 Chapter 4 Kinematics In Two Dimensions ac = v2 r (4.56) Therefore, for the uniform circular motion of an object moving at constant speed v in a circle of radius r, the object undergoes an acceleration ac, pointed toward the center of the circle, and having the magnitude given by equation 4.56. Example 4.5 Find the centripetal acceleration. An object moves in a circle of 10.0-m radius, at a constant speed of 5.00 m/s. What is its centripetal acceleration? Solution The centripetal acceleration, found from equation 4.56, is ac = v2 r = (5.00 m/s)2 10.0 m = 2.50 m/s2 (4.56) To go to this Interactive Example click on this sentence. Example 4.6 The special case of the centripetal acceleration equal to the gravitational acceleration. At what uniform speed should a body move in a circular path of 8.50 m radius such that the acceleration experienced will be the same as the acceleration due to gravity? Solution We find the velocity of the moving body in terms of the centripetal acceleration by solving equation 4.56 for v: v = ra c To have the body experience the same acceleration as the acceleration due to gravity, we set ac = g and get v = ra c = rg = (8.50 m)(9.80 m/s 2 ) = 9.13 m/s 4-29 Chapter 4 Kinematics In Two Dimensions To go to this Interactive Example click on this sentence. 4.8 Nonuniform Circular Motion If the body that is moving in a circle is not moving at constant speed, then there is an additional term that must be considered because the speed is changing with time. If the speed is changing with time this means that there is a tangential acceleration aT given by (4.57) aT = dv dt This means that the body is speeding up or slowing down as it moves in the circle. This acceleration is a vector that is tangential to the circle whereas the centripetal acceleration ac is a vector that points toward the center of the circle and is perpendicular to the tangent. For this nonuniform circular motion, the resultant acceleration of the moving body becomes the vector sum of the tangential acceleration and the centripetal acceleration, as seen in figure 4.14. That is, with the magnitude a = ac + aT (4.58) a = a 2c + a 2T (4.59) Figure 4.15 The total acceleration of a body in nonuniform circular motion point is equal to the vector sum of the tangential acceleration and the centripetal acceleration. The angle θ that the acceleration vector a makes with the acceleration vector ac is found as tan θ = aT (4.60) ac and 4-30 Chapter 4 Kinematics In Two Dimensions θ = tan−1 aT ac (4.61) Example 4.7 A body moving in nonuniform circular motion. At the instant that a car is traveling at 3.50 m/s in a circle of radius 8.50 m, it undergoes a tangential acceleration of 2.50 m/s2. Find (a) the centripetal acceleration of the car, and (b) the magnitude of the resultant acceleration of the car, and (c) the angle that the acceleration vector makes with the radius of the circle. Solution a. The centripetal acceleration, found from equation 4.56, is ac = v2/r = (3.50 m/s)2/(8.50 m) = 1.44 m/s2 b. The resultant acceleration is found from equation 4.59 as 2 2 a = (a c ) + (a T ) = (1.44 m/s 2 ) 2 + (2.50 m/s 2 ) 2 = 2.89 m/s2 c. The angle θ that the acceleration vector a makes with the acceleration vector ac is found as θ = tan−1 aT (4.61) ac −1 θ = tan 2.50 m/s2 1.44 m/s2 = 60.00 To go to this Interactive Example click on this sentence. The Language of Physics Average velocity The average rate at which the displacement vector changes with time. Since a displacement is a vector, the velocity is also a vector (p. ). 4-31 Chapter 4 Kinematics In Two Dimensions Instantaneous velocity The velocity at a particular instant of time. It is defined as the limit of the ratio of the change in the displacement of the body to the change in time, as the time interval approaches zero. The magnitude of the instantaneous velocity is the instantaneous speed of the moving body (p. ). Acceleration The rate at which the velocity of a moving body changes with time (p. ). Kinematic equations of linear motion A set of equations that gives the displacement and velocity of the moving body at any instant of time, and the velocity of the moving body at any displacement, if the acceleration of the body is a constant (p. ). Projectile motion The motion of a body thrown or fired with an initial velocity v0 in a gravitational field (p. ). Trajectory The path through space followed by a projectile (p. ). Range of a projectile The horizontal distance from the point where the projectile is launched to the point where it returns to its launch height (p. ). Uniform circular motion Motion in a circle at constant speed. Because the velocity vector changes in direction with time, this type of motion is accelerated motion (p. ). Centripetal acceleration When a body moves in uniform circular motion, the acceleration is called centripetal acceleration. The direction of the centripetal acceleration is toward the center of the circle (p. ). Radian A unit that is used to measure an angle. It is defined as the ratio of the arc length subtended to the radius of the circle, where 2π radians equals 3600 (p. ). Nonuniform circular motion Motion in a circle with changing speed. In this type of accelerated motion, the velocity vector changes in both magnitude and direction with time (p. ). 4-32 Chapter 4 Kinematics In Two Dimensions Summary of Important Equations Average velocity Acceleration vavg = ∆r = r2 − r1 ∆t t2 − t1 (4.1) a = ∆v = v − v0 ∆t t a = dv dt (4.3) (4.4) ∆r dr = v lim = ∆t →0 ∆t dt Instantaneous velocity (4.2) Velocity at any time for constant acceleration v = v0 + at (4.6) r = v0t + 1 at2 2 x = v0xt (4.5) Displacement at any time for constant acceleration For Projectile Motion x-displacement y = v0yt − 1 gt2 2 y-displacement x-component of velocity vx = v0x y-component of velocity vy = v0y − gt (4.14) (4.18) (4.19) vy2 = v0y2 − 2gy y-component of velocity at any height y (4.13) (4.26) Range R = v02 sin 2θ g (4.25) Velocity of a moving body v − v0 = ∫ adt (4.40) Displacement of a moving body r −= r0 Definition of angle in radians Arc length Centripetal acceleration Nonuniform circular motion t 0 ∫ t 0 t v 0 dt + ∫ atdt 0 (4.42) θ= s r s=rθ (4.48) ac = v2 r a = ac + aT (4.56) 4-33 (4.49) (4.58) Chapter 4 Kinematics In Two Dimensions with the magnitude a = a 2c + a 2T (4.59) Questions for Chapter 4 1. Discuss the difference between distance and displacement. 2. Discuss the difference between speed and velocity. 3. What is the acceleration of a projectile when its instantaneous vertical velocity is zero at the top of its trajectory? 4. Can the velocity of an object be in a different direction than the acceleration? Give some examples. 5. A person on a moving train throws a ball straight upward. Describe the motion as seen by a person on the train and by a person on the station platform. 6. If a car is moving in uniform circular motion at a speed of 5.00 m/s and has a centripetal acceleration of 2.50 m/s2, will the speed of the car increase at 2.50 m/s every second? 7. Does it make any sense to say that a car in uniform circular motion is moving with a velocity that is tangent to a circle and yet the acceleration is perpendicular to the tangent? Should not the acceleration be tangential because that is the direction that the car is moving? 8. If a car is moving in uniform circular motion, and the acceleration is toward the center of that circle, why does the car not move into the center of the circle? 9. Answer the student’s question, “If an object moving in uniform circular motion is accelerated motion, why doesn’t the speed change with time?” Problems for Chapter 4 4.2 Projectile Motion in Two Dimensions 1. A projectile is thrown from the top of a building with a horizontal velocity of 15.0 m/s. The projectile lands on the street 85.0 m from the base of the building. How high is the building? 2. To find the velocity of water issuing from the nozzle of a garden hose, the nozzle is held horizontally and the stream is directed against a vertical wall. If the wall is 7.00 m from the nozzle and the water strikes the wall 0.650 m below the horizontal, what is the velocity of the water? 4-34 Chapter 4 Kinematics In Two Dimensions Diagram for problem 2. 3. A bomb is dropped from an airplane in level flight at a velocity of 970 km/hr. The altitude of the aircraft is 2000 m. At what horizontal distance from the initial position of the aircraft will the bomb land? 4. A cannon is placed on a hill 20.0 m above level ground. A shell is fired horizontally at a muzzle velocity of 300 m/s. At what horizontal distance from the cannon will the shell land? How long will this take? What will be the shell’s velocity as it strikes its target? 5. A shell is fired from a cannon at a velocity of 300 m/s to hit a target 3000 m away. At what angle above the horizontal should the cannon be aimed? 6. In order to hit a target, a marksman finds he must aim 1.00 m above the target, which is 300 m away. What is the initial speed of the bullet? 7. A golf ball is hit with an initial velocity of 50.0 m/s at an angle of 55.00 above the horizontal. (a) How high will the ball go? (b) What is the total time the ball is in the air? (c) How far will the ball travel horizontally before it hits the ground? 8. A projectile is thrown from the ground with an initial velocity of 20.0 m/s at an angle of 40.00 above the horizontal. Find (a) the projectile’s maximum height, (b) the time required to reach its maximum height, (c) its velocity at the top of the trajectory, (d) the range of the projectile, and (e) the total time of flight. 4.3 The Calculus and Kinematics 9. A body moves with an acceleration given by a = Ati + Bt3j Find the equations for the velocity v and displacement r of the moving body at any time t. 10. The displacement of a certain moving body is given by r = v0xti + 3At2j + 4Bt3k where A and B are constants. Find the equation for the velocity and acceleration of the moving body at any time t. 4-35 Chapter 4 Kinematics In Two Dimensions 4.6 Angles Measured in Radians 11. Express the following angles in radians: (a) 3600, (b) 2700, (c) 1800, (d) 900, (e) 600, (f) 300, and (g) 1 rev. 12. Express the following angles in degrees: (a) 2π rad, (b) π rad, (c) 1 rad, and (d) 0.500 rad. 13. A record player turns at 33-1/3 rpm. What distance along the arc has a point on the edge moved in 1.00 min if the record has a diameter of 10.0 in.? 4.7 The Centripetal Acceleration 14. A 4.00-kg stone is whirled at the end of a 2.00-m rope in a horizontal circle at a speed of 15.0 m/s. Ignoring the gravitational effects calculate the centripetal acceleration. 15. An automatic washing machine, in the spin cycle, is spinning wet clothes at the outer edge at 8.00 m/s. The diameter of the drum is 0.450 m. Find the acceleration of a piece of clothing in this spin cycle. 16. A 1500-kg car moving at 86.0 km/hr goes around a curve of 325-m radius. What is the centripetal acceleration of the car? Additional Problems 17. Two students are having a race on a circular track. Student 1 is on the inside track, which has a radius of curvature r1 = 250 m, and is moving at the speed v1 = 4.50 m/s. With what speed must student 2 run to keep up with student 1 if student 2 is on the outside track of radius of curvature r2 = 255 m? 18. Show that the range of a projectile is the same for either a projection angle of 45.00 +θ or an angle of 45.00 −θ. 19. A projectile hits a target 1.50 km away 10.5 s after it was fired. Find (a) the elevation angle of the gun and (b) the initial velocity of the projectile. 20. A football is kicked with an initial velocity of 20.0 m/s at an angle of 65.00 above the horizontal. Find (a) how long the ball is in the air, (b) how far down field the ball lands, (c) how high the ball rises, and (d) the velocity of the ball when it strikes the ground. 21. A baseball is hit at an initial velocity of 35.0 m/s at an angle of 45.00 above the horizontal. Will the ball clear a 3.00 m fence 92.0 m from home plate for a home run? If so, by how much will it clear the fence? 22. A ball is thrown from a bridge 100 m high at an initial velocity of 30.0 m/s at an angle of 50.00 above the horizontal. Find (a) how high the ball goes, (b) the total time the ball is in the air, (c) the maximum horizontal distance that the ball travels, and (d) the velocity of the ball as it strikes the ground. 23. A ball is thrown at an angle of 35.50 below the horizontal at a speed of 22.5 m/s from a building 20.0 m high. (a) How long will it take for the ball to hit the ground below? (b) How far from the building will the ball land? 24. Using the kinematic equations for the x- and y-components of the displacement, find the equation of the trajectory for two-dimensional projectile motion. Compare this equation with the equation for a parabola expressed in its standard form. 4-36 Chapter 4 Kinematics In Two Dimensions 25. Using the kinematic equations, prove that if two balls are released simultaneously from a table, one with zero velocity and the other with a horizontal velocity v0x, they will both reach the ground at the same time. Interactive Tutorials 26. A golf ball is hit with an initial velocity v0 = 53.0 m/s at an angle θ = 50.00 above the horizontal. (a) How high will the ball go? (b) What is the total time the ball is in the air? (c) How far will the ball travel horizontally before it hits the ground? 27. Generalized two-dimensional projectile motion. A projectile is fired from a height y0 above the horizontal with an initial velocity v0 at an angle θ. Find (a) the time tr for the projectile to rise to its maximum height; (b) the total time tt the ball is in the air; (c) the maximum distance the ball travels in the x-direction, xmax before it hits the ground; (d) the maximum height ymax of the projectile; (e) the velocity vg of the projectile as it strikes the ground; and (f) the location and velocity of the projectile at any time t. (g) Plot a picture of the trajectory. To go to these Interactive Tutorials click on this sentence. To go to another chapter, return to the table of contents by clicking on this sentence. 4-37