Prof. Jian Zhang - Purdue University
advertisement

An Introduction to Statistical Learning Theory
Jian Zhang
Department of Statistics
Purdue University
April, 2010
1
Theory of Learning
Goal: To study theoretical properties of learning algorithm from a
statistical viewpoint.
The theory should be able model real/artificial data so that we can
better understand and predict them.
Statistical Learning Theory (SLT) is just one approach to understanding/studying learning systems.
SLT results are often given in the form the generalization error
bounds, although other types of results are possible.
2
Basic Concepts
Setup:
•
•
•
•
IID observations (x1, y1), . . . , (xn, yn) ∼ PX,Y
yi’s are binary: yi ∈ {0, 1} or {±1}
Dn = {(x1, y1), . . . , (xn, yn)} is also known as the training data
PX,Y is some unknown distribution
A learning algorithm A is a procedure which takes the training data
and produces a predictor ĥn = A(Dn) as the output. Typically the
learning algorithm will search over a space of functions H which is
known as the hypothesis space. So it can also be written as
ĥn = A(Dn , H).
3
Generalization of a Learner
For any predictor/classifier h : X #→ {0, 1}
•
Its performance can be measured by a loss function !(y, p)
•
Most popular loss for classification is the 0/1 loss:
!(y, p) = 1{y %= p}
•
Generalization error (aka. risk):
R(h) := EX,Y [!(Y, h(X))] = P (Y %= h(X)).
Generalization error measures how well the classifier can predict on
average for future observations. Note that it cannot be calculated
in practice as PX,Y is unknown.
4
Bayes Risk and Bayes Classifier
Bayes risk R∗ is defined as the minimum risk over all measurable
functions:
R∗ =
inf
R(h)
h measurable
and Bayes classifier h∗ is the one which attains the Bayes risk:
R∗ = R(h∗ ).
It is easy to show that h∗(x) takes the following form:
!
1, P (Y = 1|X = x) > 0.5
h∗(x) =
0, otherwise.
5
Risk Consistency
Given IID observations Dn = {(x1, y1), . . . , (xn, yn)}, the learning algorithm outputs a classifier ĥn = A(Dn ):
•
•
ĥn is a function of Dn;
R(ĥn) = EX,Y [1{Y %= ĥn(X)}] is also a random variable of Dn
A learning procedure is called risk consistent if
EDn [R(ĥn)] → R∗
as n → ∞. In other words, as more and more training data is provided, the risk of the output classifier will converge to the minimum
possible risk.
6
Empirical Risk Minimization
In general R(h) is not computable since PX,Y is unknown. In practice,
we use empirical risk minimization within a function class H:
n
1"
!(yi, h(xi))
ĥn = arg min R̂n(h) = arg min
h∈H
h∈H n
i=1
where
•
•
•
•
H is some specified function class;
R̂n(h) is the same as R(h) except we replace PX,Y by the empirical
distribution
By law of large numbers, R̂n (h) → R(h) for any h
Uniform convergence needs further condition
7
Overfitting
Overfitting refers to the situation where we have a small empirical
risk but still a relatively large true risk. It could happen especially
when
•
•
sample size n is small
hypothesis space H is large
Recall that empirical risk R̂n(h) is a random variable whose mean
is R(h). Pure empirical risk minimization may lead to the fitting of
noise eventually – overfitting.
8
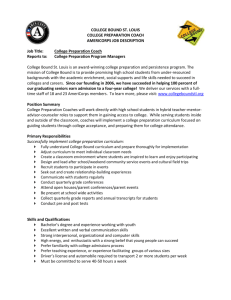
Overfitting: An Example
Consider the following example. Let !(y, p) = (y − p)2 and we obtain
the predictor ĥ by ERM:
n
1"
(yi − h(xi))2.
ĥ = arg min
h∈H n
i=1
Polynomial with degree1
Polynomial with degree2
1.5
1.5
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−1
−1.5
−1.5
0
2
4
6
0
Polynomial with degree3
1.5
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−1
−1.5
−1.5
2
4
4
6
Polynomial with degree5
1.5
0
2
6
9
0
2
4
6
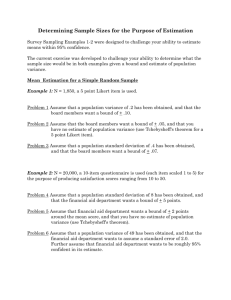
Overfitting vs. Model Complexity
The following figure shows the tradeoff between model complexity
and empirical risk:
True/Empirical Risk VS. Model Complexity
Risk
Empirical Risk
True Risk
Best Model in Theory
Model Complexity
10
Approximation Error vs. Estimation Error
Suppose that the learning algorithm chooses the predictor from the
hypothesis space H, and re-define
h∗ = arg inf R(h),
h∈H
i.e. h∗ is the best predictor among H. Then the excess risk of the
output ĥn of the learning algorithm can be decomposed as follows:
#
$ #
$
R(ĥn ) − R∗ = R(h∗ ) − R∗ + R(ĥn ) − R(h∗ )
%
&'
( %
&'
(
approximation error
11
estimation error
Approximation Error vs. Estimation Error
#
$ #
$
R(ĥn ) − R∗ = R(h∗ ) − R∗ + R(ĥn ) − R(h∗ )
%
&'
( %
&'
(
approximation error
estimation error
Such a decomposition reflects a trade-off similar to the bias-variance
tradeoff:
•
•
approximation error: deterministic and is caused by the restriction of using H;
estimation error: caused by the usage of a finite sample that
cannot completely represent the underlying distribution.
The approximation error behaves like a bias square term, and the
estimation error behaves like the variance. Basically if H is large
then we have a small approximation error but a relatively large
estimation error and vice versa.
12
Generalization Error Bound
Consistency only states that as n → ∞, EDn [R̂n(ĥn)] converges to the
minimum risk. However, sometimes only knowing this is not enough.
We are also interested in the following:
•
•
•
How fast is the convergence?
R̂n(ĥn) is a function of Dn, and thus a random variable. What is
the distribution of this random variable?
In particular, what is the behavior of the tail of the distribution?
A tail bound on the risk can often give us more information including
consistency and rate of convergence.
13
Generalization Error Bound
Recall that the excess risk can be decomposed into approximation
error and estimation error, i.e.
#
$ #
$
∗
∗
R(ĥn ) − R = inf R(h) − R + R(ĥn ) − inf R(h) .
% h∈H &'
( %
&'h∈H
(
approximation error
estimation error
We would like to bound the estimation error. Specifically, if we use
ERM to obtain our predictor ĥn = arg minh∈H R̂n(h), and assume that
inf h∈H R(h) = R(h∗ ) for some h∗ ∈ H, then we have
R(ĥn ) − inf R(h) = R(ĥn ) − R(h∗ )
h∈H
≤ R(ĥn ) − R(h∗ ) + R̂n(h∗) − R̂n (ĥn)
= (R(ĥn)) − R̂n (ĥn)) −)(R(h∗ ) − R̂n (h∗))
)
)
≤ 2 sup )R(h) − R̂n (h)) .
h∈H
14
PAC Learning
Thus if we can obtain uniform bound of suph∈H |R(h) − R̂n(h)| then
the approximation error can be bounded. Thus again justifies the
usage of the ERM method.
The probably approximately correct (PAC) learning model typically
states as follows: we say that ĥn is "-accurate with probability 1 − δ,
if
*
+
P R(ĥn ) − inf R(h∗ ) > " < δ.
h∈H
In other words, we have R(ĥn ) − inf h∈H R(h) ≤ " with probability at
least (1 − δ).
15
PAC Learning: Example I
Consider the special case H = {h}, i.e. we only have a single function. Furthermore, we assume that it can achieve 0 trainining error
over Dn, i.e. R̂n(h) = 0. Then what is the probability that its generalization error R(h) ≥ "? We have
#
$
P R̂n(h) = 0, R(h) ≥ " = (1 − R(h))n
≤ (1 − ")n
≤ exp(−n").
Setting the RHS to δ and solve for " we have " =
probability (1 − δ),
*
+
1
1
P R̂n(h) = 0, R(h) < log
.
n
δ
16
1
n
log 1δ . Thus with
PAC Learning: Example I
Note that we can also utilzie the Hoeffding’s inequality to obtain
P (|R̂n(h) − R(h)| ≥ ") ≤ 2 exp(−2n"2), which leads to
.
,
1
2
log
≤ δ.
P |R̂n(h) − R(h)| ≥
2n
δ
This is more general but not as tight as the previous one since it
does not utilize the fact R̂n(h) = 0.
Example 1 essentially says that for each fixed function h, there is a
set S of samples (whose measure P (S) ≥ 1−δ) for which |R̂n(h)−R(h)|
is bounded. However, such S sets could be different for different
functions. To handle this issue we need to obtain the uniform deviations since:
R̂n (ĥn) − Rn (ĥn) ≤ sup(R̂n (h) − R(h)).
h∈H
17
PAC Learning: Example II
Consider the case H = {h1, . . . , hm}, a finite class of functions. Let
/
0
Bk := (x1, y1) . . . , (xn, yn) : R(hk ) − R̂n(hk ) ≥ " , k = 1, . . . , m.
Each Bk is the set of all bad samples for hk , i.e. the samples for which
the bound fails for hk . In other words, it contains all misleading
samples.
If we want to measure the proability of the samples which are bad
for any hk (k = 1, . . . , m), we could apply the Bonferroni inequality
to simply obtain:
m
"
P (B1 ∪ . . . ∪ Bm) ≤
P (Bk ).
k=1
18
PAC Learning: Example II
Thus we have
#
$
P ∃h ∈ H : R(h) − R̂n(h) ≥ "
=
P
,
m /
0
1
R(hk ) − R̂n(hk ) ≥ "
k=1
union bound
≤
≤
m
"
k=1
#
$
P R(hk ) − R̂n(hk ) ≥ "
m exp(−2n"2).
Hence for H = {h1, . . . , hm}, with probability at least (1 − δ),
2
log m + log 1δ
.
∀h ∈ H, R(h) − R̂n(h) ≤
2n
Since this is a uniform upper bound, it can be applied to ĥn ∈ H.
19
.
PAC Learning: Example II
From the above PAC learning examples we can see that
•
It requires assumptions on data generation, i.e. samples are iid.
The error bounds are valid wrt repeated samples of training data.
√
• For a fixed function we roughly have R(h) − R̂n (h) ≈ 1/
n.
3
• If |H| = m then suph∈H (R(h) − R̂n (h)) ≈
log m/n. The term log m
can be thought as the complexity of the hypothesis space H.
•
There are several things which can be improved:
•
•
•
Hoeffding’s inequality does not utlize the variance information.
The union bound could be as bad as if all the functions in H were
independent.
The supremum over H might be too conservative.
20
From Finite to (Uncountably) Infinite: Basic Idea
If H has infinite number of functions, we want to group functions
into clusters in such a way that functions in each cluster behave
similarly.
•
•
•
Since we aim to bound the risk, the grouping criteria should be
related to function’s output.
Need to related function’s output on a finite sample to its output
on the whole population.
If the number of clusters is finite, we can then apply the union
bound to obtain the generalization error bound.
21
Growth Function
Given a sample Dn = {(x1, y1), . . . , (xn, yn )}, and define S = {x1, . . . , xn}.
Consider the set
HS = Hx1,...,xn = {(h(x1), . . . , h(xn) : h ∈ H} .
The size of this set is the total number of possible ways that S =
{x1, . . . , xn} can be classified. For binary classification the cardinality
of this set is always finite, no matter how large H is.
Definition (Growth Function). The growth function is the maximum
number of ways into which n points can be classified by the function
class:
GH(n) = sup |HS | .
x1 ,...,xn
22
Growth Function
Growth function can be thought as a measure of the “size” for the
class of functions H.
Several facts about the growth function:
•
•
When H is finite, we always have GH(n) ≤ |H| = m.
Since h(x) ∈ {0, 1}, we have GH(n) ≤ 2n. If GH (n) = 2n, then there
is a set of n points such that the class of functions H can generate
any possible classification result on these points.
23
Symmetrization
We define Zi = (Xi, Yi). For notational simplicty, we will use
n
1"
Pf = E[f (X, Y )], Pn f =
f (xi, yi).
n i=1
Here f (X, Y ) can be thought as !(Y, h(X)). The key idea is to upper
bound the true risk by an estimate from an independent sample,
which is often known as the “ghost” sample. We use Z10 , . . . , Zn0 to
denote the ghost sample and
n
1"
0
f (x0i, yi0 ).
Pn f =
n i=1
Then we could project the functions in H onto this double sample
and apply the union bound with the help of the growth function
GH (.) of H.
24
Symmetrization
3
Lemma (Symmetrization). For any t > 0 such that t ≥ 2/n, we
have
,
.
+
*
)
) 0
)
)
P sup |Pf − Pn f | ≥ t ≤ 2P sup )Pnf − Pn f ) ≥ t/2 .
f ∈F
h∈H
25
Generalization Bound for Infinite Function Class
Theorem (Vapnik-Chervonenkis). For any δ > 0, with probability at
least 1 − δ,
2
2 log GH(2n) + 2 log 2δ
∀h ∈ H, R(h) ≤ R̂n(h) + 2
.
n
Proof: Let F = {f : f (x, y) = !(y, h(x)), h ∈ H}.
First note that GH(n) = GF (n).
26
Generalization Bound for Infinite Function Class
P
*
,
.
+
sup R(h) − R̂n(h)) ≥ " = P sup(Pf − Pnf ) ≥ "
h∈H
f ∈F
,
sup(P0nf − Pnf ) ≥ "/2
≤ 2P
= 2P
.
,
f ∈F
.
sup (P0nf − Pnf ) ≥ "/2
f ∈FD ,D0
n n
≤ 2GF (2n)P ((P0nf − Pnf ) ≥ "/2)
≤ 2GF (2n) exp(−n"2/8).
The last inequality is by the Hoeffding’s inequality since P (Pn0 f −
Pnf ≥ t) ≤ exp(−nt2/2). Setting δ = 2GF (2n) exp(−n"2/8) we have the
claimed result.
27
Consistency and Rate of Convergence
It is often easy to obtain consistency and rate of convergence result
from the generalization error bound.
4´
3
√
2
• Consistency: use the fact E[Z] ≤
E[Z ] =
P (Z > t)dt and
plug in the bound.
•
Rate of convergence: often can be read off the error bound.
28
Data Dependant Error Bound
Definition. Let µ be a proability measure on X and assume that
X1, . . . , Xn are independent random variables according to µ. Let F
be a class of functions mapping from X to R. Define the random
variable
5
6
n
)
"
1
)
R̂n(F) := E sup
σif (Xi) )X1, . . . , Xn ,
f ∈F n i=1
where σ1, . . . , σn are independent uniform {±1}-valued random variables. R̂n(F) is called the empirical Rademacher averages of F. Note
that it depends on the sample and can be actually computed. Essentially it measures the correlation between a random noise (labeling)
and functions in the function class F, in the supremum sense. The
Rademacher averages of F is
Rn(F) = E[R̂n(F)].
29
Data-Dependent Error Bound
Theorem. Let F be a set of binary-valued {0, 1} functions. For all
δ > 0, with proability at least 1 − δ,
log(1/δ)
∀f ∈ F, Pf ≤ Pnf + 2Rn(F) +
,
2n
and also with probability at least 1 − δ,
log(2/δ)
,
∀f ∈ F, Pf ≤ Pn f + 2R̂n(F) + C
n
√
√
where C = 2 + 1/ 2.
30