Sign and Rank Covariance Matrices: Statistical Properties and
advertisement

Sign and Rank Covariance Matrices:
Statistical Properties and Application to Principal Components Analysis
Christophe Croux, Esa Ollila, and Hannu Oja
Abstract. In this paper, the estimation of covariance matrices based on multivariate sign and rank vectors is discussed. Equivariance and robustness properties of the sign and rank covariance matrices are described. We show their
use for the principal components analysis (PCA) problem. Limiting efficiencies of the estimation procedures for PCA are compared.
1. Introduction
Let X = {x1 , ..., xn } be a univariate data set. The univariate signs and centered
ranks Si and Ri can be defined implicitly by
(1.1)
ave{|xi |} = ave{Si xi } and
ave{|xi − xj |} = ave{Ri xi }.
If the sign function S is defined as S(x) = −1, 0, 1 for x < 0, = 0, > 0, then
Si = S(xi ) and
Ri = avej {S(xi − xj )}
In the univariate case, signs and ranks have been extensively used to construct
estimates and tests in the one sample, two-sample and several sample cases and also
in univariate regression problems. The concepts of sign and rank can be extended to
the multivariate case by considering extensions of the L1 type objective functions
in (1.1).
Let X = {x1 , ..., xn } be a k-variate data set. We first generalize the concept
of sign and ranks utilizing the Euclidean distance || · ||, resulting into the spatial
signs and ranks. These multivariate vector valued spatial signs and ranks S i and
Ri verify, analogous to (1.1),
ave{||xi ||} = ave{S Ti xi } and ave{||xi − xj ||} = ave{RTi xi }.
If
½
S(x) =
kxk−1 x
0
if x 6= 0
if x = 0
1991 Mathematics Subject Classification. Primary 62H99; Secondary 62G35.
Key words and phrases. Covariance and correlation matrices, Eigenvectors and eigenvalues, Multivariate median, Multivariate Sign and Rank, Robustness.
2
Croux, Ollila, and Oja
then signs and centered ranks are given by
S i = S(xi ) and Ri = avej {S(xi − xj )}.
The spatial signs and ranks are rotation equivariant but, unfortunately, not affine
equivariant.
Therefore we need to introduce the Oja objective function in (1.1). Every
subset of (k + 1) points xi1 , ..., xik+1 of X defines a k-variate simplex with volume
V (xi1 , ..., xik+1 ). The affine equivariant k-variate signs S i and ranks Ri , i = 1, ..., n
are implicitly defined by
n
o
©
ª
k! ave V (0, xi1 , ..., xik−1 , xi ) = ave S Ti xi
and
n
o
©
ª
k! ave V (xi1 , ..., xik , xi ) = ave RTi xi ,
respectively. For a review on multivariate signs and ranks we refer to [6], where
also explicit expressions for the affine equivariant signs and ranks are given.
Contrary to the univariate case, the multivariate signs and ranks can be used
to estimate the covariance structure also. In Section 2 we review the most important properties of the covariance matrices based on multivariate signs and ranks.
Since covariance matrices play a key-role in multivariate analysis, it is natural
to perform well-known multivariate techniques as principal component analysis,
factor analysis, canonical correlation analysis, ... using the sign and rank based
covariance matrices. This yields a class of methods of a non-parametric nature,
more robust than the classical procedures, while still being very efficient. Efficiency properties of the different methods are presented in the context of principal
component analysis. In Section 3 we treat the affine equivariant procedures, while
Section 4 discusses the approach based on the spatial signs. The latter approach
to principal component analysis is appealing since is highly robust, and fast to
carry out. Its efficiencies depend on the (standardized) eigenvalues and need to be
computed numerically. A small simulation study will be presented to compare its
finite sample efficiencies with the asymptotic ones.
While this paper puts focus on principal component analysis, other applications of sign and rank methods do exist. A first overview has been made by
[15], and more detailed studies in the context of canonical correlation analysis,
multivariate regression, independent component analysis and factor analysis are
currently being carried out. Let us also mention a nice application to wireless
communications [16] using robust principal component analysis.
2. Sign and rank covariance matrices
2.1. Definitions
For constructing the sign covariance matrix, first consider the centered data set
Y = {y 1 , ..., y n } = {x1 − µ̂, ..., xn − µ̂}.
Sign and rank covariance matrices
3
The location estimator µ̂ is chosen so that the sum of sign vectors based on Y is a
zero vector. When using spatial signs, µ̂ becomes the spatial median or L1 -median,
and when using the affine equivariant signs we obtain for µ̂ the Oja median [7]. Let
Ŝ i be the signs of the centered observations. The sign covariance matrix (SCM) is
now nothing else but the usual covariance matrix computed from the multivariate
signs:
(2.1)
T
SCM = ave{Ŝ i Ŝ i }.
In the same way, the rank covariance matrix (RCM) is defined as
(2.2)
RCM = ave{Ri Ri T },
where the rank vectors are computed from the uncentered data, so no initial location estimate is necessary here. Note that once the signs and ranks are obtained,
computation of the SCM and RCM is immediate.
Depending on whether spatial or affine equivariant signs and ranks are used,
covariance matrices with different equivariance, efficiency and robustness properties will be obtained. In all cases, the sign and rank covariance matrices are asymptotically equivalent with U-statistics and the population counterparts, population
sign and rank covariance matrices, are then naturally defined as the expected
values of the related kernels. It also follows that the SCM and RCM are consistent estimators for their population counterparts and have limiting multinormal
distributions (see [15]).
We will often refer to an elliptically symmetric distribution F . This means
that there exists a positive definite scatter matrix Σ and a location parameter µ
such that z i = Σ−1/2 (xi − µ) has a spherically symmetric distribution F0 . If the
population covariance matrix of F0 exists, we will take it without lost of generality
equal to the identity matrix, and then Σ becomes the covariance matrix of F . We
can decompose Σ as
Σ = λ1/k P LP T
where L is a diagonal matrix with Det(L) = 1 and descending diagonal elements,
P is an orthogonal matrix containing the eigenvectors of Σ in its columns, and
λ = Det(Σ) is the Wilks’ generalized variance.
2.2. Spatial sign and rank covariance matrices
The covariance matrices based on spatial signs and ranks are called the spatial
sign covariance matrix and the spatial rank covariance matrix. In the following we
list some of their properties, see e.g. [5] and [13].
• The spatial SCM and RCM are rotation equivariant but not affine equivariant.
If the SCM∗ and RCM∗ are calculated from the transformed observations x∗i =
Γxi + b, with Γ orthogonal, then
SCM ∗ = Γ SCM ΓT and RCM ∗ = Γ RCM ΓT .
4
Croux, Ollila, and Oja
• At an elliptical model distribution F , the population sign and rank covariance
matrices are given by
SCM (F ) = P LS P T and RCM (F ) = P LR P T ,
where LS and LR are diagonal matrices with positive descending elements on
the diagonal. The eigenvectors of the spatial SCM and RCM are thus the same
as those of Σ. Therefore spatial SCM and RCM may be used in the principal
component analysis (PCA) and subspace estimation.
• The influence functions of SCM and RCM are uniformly bounded, indicating
their robustness. The influence function of the spatial SCM at a distribution
F symmetric around zero has the simple form
(2.3)
IF (x, SCM, F ) = S(x)S(x)T − SCM (F )
and is seen to be constant in the radius kxk of the contamination point x.
2.3. Affine equivariant sign and rank covariance matrices
If affine equivariant signs and ranks were used, the matrices are similarly called the
affine equivariant sign covariance matrix and the affine equivariant rank covariance
matrix. Their most important properties are listed below. Full detail can be found
in [9] and [10].
• The SCM and RCM are affine equivariant in the sense that if SCM∗ and RCM∗
are calculated from the transformed observations x∗i = Axi + b, with nonsingular A, then
SCM ∗ = det(A)2 (A−1 )T SCM A−1
and
RCM ∗ = det(A)2 (A−1 )T RCM A−1 .
• At an elliptical model distribution F , the population sign and rank covariance
matrices are
SCM (F ) = λS (F )P L−1 P T and RCM (F ) = λR (F )P L−1 P T .
We see that SCM (F ) and RCM (F ) are proportional to the inverse of the
covariance matrix. The eigenvectors of Σ can be estimated using the affine
equivariant SCM and RCM , but also the eigenvalues. Since the correlation
structure of F can be retrieved, applications are possible in multivariate regression analysis [11], canonical correlations analysis (CCA), etc.
• The influence functions of SCM and RCM at a spherical distribution F0 can
be written in the form
(2.4)
IF (x, C, F0 ) = αC (r)uuT − βC (r)Ik
where the vector x = ru is decomposed in its radius r = kxk and its direction
vector u = u/kuk. At the spherical distribution F0 , the variables r and u are
independent. In fact, it can be shown that the influence function of any affine
equivariant scatter matrix functional C possessing an influence function can
be written as in (2.4) with αC (r) and βC (r) for two real valued functions [2].
When C stands for the SCM, αC (r) is a linear function in r, confirming its
Sign and rank covariance matrices
5
L1 -type character. For the RCM, the influence function is approximately linear
in the radius of the contamination point. For the sample covariance matrix, we
have a quadratic influence function. So although the influence functions of the
affine equivariant SCM and RCM are not bounded, they indicate that the sign
and rank procedures are more robust than the classical ones.
• Asymptotic efficiencies have been computed. The resulting estimates (in PCA,
CCA, multivariate regression, etc.) are highly efficient in the multivariate normal case and perform better than the estimates based on the regular sample
covariance matrix for heavy tailed distributions.
2.4. Tyler’s scatter matrix estimate
Hettmansperger and Randles [3] discussed location and scatter estimate based on
spatial signs, but now resulting in an affine equivariant procedure. The idea is as
follows: choose a positive definite symmetric k × k matrix V with T race(V ) = k
and a k-vector µ, such that
1
Ik .
k
where the spatial signs S i = S(z i ) are being computed from the standardized
observations zi = V −1/2 (xi − µ). The resulting estimate V̂ equals Tyler’s Mestimate [12]. Its properties (see [12, 3]) include:
ave{S(z i )} = 0 and ave{S(z i )S(z i )T } =
• It is affine equivariant in the sense that if SCM∗ and RCM∗ are calculated from
the transformed observations x∗i = Axi + b, with nonsingular A, then
V̂ ∗ =
k
T race(A V̂ AT )
A V̂ AT .
Tyler’s estimator can be seen as a shape matrix estimator, rather then a scatter
matrix estimator, since it estimates Σ only upto a constant [8].
• The influence functions of V̂ at a spherical distribution F0 has the same form
as (2.3) and is bounded and even constant in the radius of the contamination
point. Although the formal breakdown point of V̂ is not very high, it turns out
that for many data configurations V̂ is very robust against outliers.
• Tyler’s estimate is consistent and has a limiting multivariate normal distribution. The limiting variance is independent of F0 , which is an appealing nonparametric property.
3. Principal component analysis using affine equivariant signs and
ranks
We first state the problem. Let X = {x1 , ..., xn } be a random sample from an elliptical distribution F with covariance matrix Σ = P ΛP T where Λ = diag(λ1 , ..., λk )
with λ1 > ... > λk and P = (p1 , ..., pk ) . As before, write F0 for the spherical
distribution of z ∼ Σ−1/2 (xi − µ) = Λ−1/2 P T (xi − µ).
6
Croux, Ollila, and Oja
The problem is to estimate the eigenvectors pj , j = 1, ..., k. In [2] we find
the following general result for eigenvector estimate p̂C,j computed from a regular
affine equivariant scatter matrix estimator C.
√
Proposition 3.1. Under general assumptions, the limiting distribution of n(p̂C,j −
pj ) is a multivariate normal distribution with limiting covariance matrix
·
¸
2
λj λl
δC
(F0 ) X
T
ASV(pC,j ; F ) =
pp
k(k + 2)
(λj − λl )2 l l
l6=j
2
(F0 )
δC
where the constant
αC is given by (2.4).
=
2
EF0 [αC
(r)]
With
(3.1)
T race(ASV(pC,j ; F )) =
depends on the used scatter matrix C and
·
¸
2
δC
(F0 ) X
λj λl
k(k + 2)
(λj − λl )2
l6=j
a natural measure of efficiency when comparing competing estimates based on
affine equivariant scatter matrices C1 and C2 is given by
(3.2)
ARE(C2 , C1 ; F ) =
T race(ASV(pC1 ,j ; F ))
δ 2 1 (F0 )
= C
2 (F ) .
T race(ASV(pC2 ,j ; F ))
δC
0
2
2
Note that (3.2) only depends on F0 and that only the constants δC
(F0 ) are needed
in efficiency comparisons. With r = kzk the radius of z ∼ F0 , the constant is
2
δC
(F0 ) =
k 2 E(r4 )
E 2 (r2 )
for the regular sample covariance matrix. For the affine equivariant sign covariance
matrix and for Tyler’s estimate, one gets
·
¸
4E(r2 )
2
2
δC
(F0 ) = k 2
−
3
and δC
(F0 ) = (k + 2)2 ,
E 2 (r)
respectively.
Now we are ready to compare the efficiency of the estimates of pj based on the
different affine equivariant scatter matrices. In the table below we give asymptotic
relative efficiencies of the eigenvector estimates based on SCM, RCM, and Tyler’s
estimator relative to eigenvector estimates based on the sample covariance matrix.
We took for F0 once the normal distribution and once a multivariate student
t-distribution with 5 degrees of freedom, t(5), and considered dimensions k =
2, 5, 10 :
It is confirmed that at normal distributions the efficiencies are very high for
the affine equivariant SCM and RCM. Also Tyler’s estimator is quite efficient in
the higher dimensions. At the heavy tailed t(5)-distribution all estimators clearly
dominate the classical procedure.
Sign and rank covariance matrices
SCM
RCM
Tyler’s M
k=2
0.96
0.99
0.50
Normal
k=5
0.99
0.97
0.71
k = 10
0.99
0.97
0.83
k=2
2.00
2.05
1.50
t(5)
k=5
1.91
1.92
2.14
7
k = 10
1.84
1.86
2.50
4. Principal component analysis using spatial signs
Besides its high robustness, an important virtue of the spatial SCM is its simplicity and ease of implementation. In contrast with many other highly robust
multivariate estimators, the required computation time is extremely limited. For
centering the data, we need to compute L1 -median, which comes down to solving
a convex optimization problem and can be done very fast and accurately. Then,
the computation of the actual SCM is only an explicit O(n) operation.
A nice feature of PCA based on the spatial SCM is that it can also be applied
in case the number of variables k is higher than the number of observations n, as
was done by [4] for a functional data analysis problem. Indeed, the definition of
the spatial median and the spatial SCM rely on Euclidean distances, which can be
computed without any problem in any dimension. Of course, the spatial SCM will
not have full rank in this case. Note that the affine equivariant SCM and RCM
are not well defined for k > n, since the volumes of the simplices appearing in
their definition will all be equal to zero. Experience shows us that even for high
dimensional data sets, the spatial SCM can be computed without any difficulty.
But the spatial SCM has one major drawback: it is only orthogonal equivariant, and not affine equivariant. In the context of principal component analysis,
however, orthogonal equivariance is sufficient: let p∗j be calculated from the transformed observations x∗i = αΓxi + b, with Γ orthogonal, b a vector and α a scalar,
then we have p∗j = Γpj for j = 1, . . . , k.
We investigate the efficiency properties of the eigenvector estimates based on
the spatial SCM, theoretically and by means of a simulation experiment. We do
not considered yet the spatial RCM: we infer that its efficiencies will be somewhat
higher. But we should not forget that the computational complexity of the RCM
is is O(n2 ), making it less attractive as a competitor for the spatial SCM in the
context of PCA.
4.1. Efficiency for PCA based on the spatial SCM
As in Section 3, suppose that the data are generated from an elliptically symmetric distribution with covariance matrix Σ = P ΛP T . Now we cannot reduce the
inference problem to the spherically symmetric model, since this would require a
non-orthogonal transformation of the data. But by means of a rotation, we obtain
z i = P T (xi − µ) ∼ F1 , a centered distribution having diagonal covariance matrix
diag(λ1 , . . . , λk ). Note that we can decompose z i as z i = ri Λ1/2 ui , with ui uniformly distributed on the periphery of the k-variate unit sphere and independent
of ri = kΛ−1/2 z i k.
8
Croux, Ollila, and Oja
As mentioned in Section 2, the population SCM is of the form P ΛS P T where
we can write now
· 1/2 T 1/2 ¸
Λ uu Λ
zz T
]=E
= diag(λS,1 , ..., λS,k ) with λS,1 > ... > λS,k .
ΛS = EF1 [
kzk2
uT Λu
The eigenvalues λS,j of the spatial SCM depend in a non-linear way on the eigenvalues of Σ. The limiting distribution of the jth eigenvector p̂S,j of the spatial
SCM can be derived via similar arguments as in [1] and [2].
√
Proposition 4.1. Under general assumptions, the limiting distribution of n(p̂S,j −
pj ) is a multivariate normal distribution with limiting covariance matrix
"
#
X
λl λj bjl (Λ)
T
ASV(pS,j ; F ) =
,
2 pl pl
(c
(Λ)λ
−
c
(Λ)λ
)
j
j
l
l
l6=j
where
cl (Λ) = E[u2j /(γ1 u21 + . . . + γk u2k )]
for l = 1, . . . , k, and for 1 ≤ j, l ≤ k
bjl (Λ) = E[u2j u2l /(γ1 u21 + . . . + γk u2k )]2 ,
with (u1 , . . . , uk ) the components of a random variable u, uniformly distributed on
the periphery of a unit sphere, and γ1 , . . . , γp the standardized eigenvalues, that is
γj = λj /(λ1 + . . . , λk ).
It is important to note that this limit distribution only depends on the standardized eigenvalues, but not on the underlying elliptical model (i.e. it does not
depend on the distribution of the radius r = kzk for z ∼ F0 .) In this sense, and
similar to Tyler’s estimator, the spatial SCM is of a non-parametric nature.
Efficiency comparisons can be based again on
"
#
X
λi λj bij (Λ)
(4.1)
T race(ASV(pS,j ; F )) =
2 .
(λi ci (Λ) − λj cj (Λ))
j6=i
We emphasize that asymptotic relative efficiencies, as defined in (3.2), will now
depend on the standardized eigenvalues (in contrast with the affine equivariant
procedure). When we are tending to a spherically symmetric distribution, we have
that cj (Λ) = 1/k and bij (Λ) = 1/(k(k + 2)), yielding a limit value for the trace of
the asymptotic variance
·
¸
k+2X
λj λl
,
k
(λj − λl )2
l6=j
the same result as for the affine equivariant Tyler’s estimator. The corresponding
relative efficiency with respect to the classical estimator is then, for this limit case,
given by k/(k + 2).
In the bivariate case, it is possible to compute the asymptotic variances explicitly. Let γ = λ2 /λ1 . After some calculus we obtain from (4.1) and for j = 1 an
9
0.5
Sign and rank covariance matrices
0.0
0.1
0.2
0.3
0.4
Efficiency
0.0
0.2
0.4
0.6
0.8
1.0
gamma
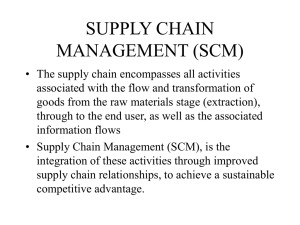
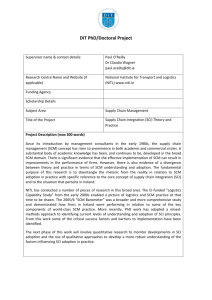
Figure 1. Asymptotic relative efficiency of the first eigenvector
estimate based on the spatial SCM w.r.t. the estimate based on
the sample covariance matrix for k = 2 at a normal distribution
N (0, diag(λ1 , λ2 )) as a function of γ = λ2 /λ1 .
√
γ
γ
asymptotic variance of 2(1−√γ)2 , while for the classical estimator we get (γ−1)
2.
Figure 1 pictures the relative asymptotic efficiency of the first eigenvector estimate
based on the spatial SCM with respect to the classical estimate as a function of
γ. We see that the efficiency increases in γ, and tends fast to its maximal value
of k/(k + 2) = 0.5 when γ tends to one. So the efficiencies get higher when we
are closer to a spherically symmetric distribution. Indeed, in the later case the
information lost when projecting the data on the unit sphere, i.e. when computing
the spatial signs, is minimal. On the other hand, note that already for γ >= 0.2,
the efficiency loss w.r.t the maximal value (which equals the efficiency of Tyler’s
estimate) remains reasonable.
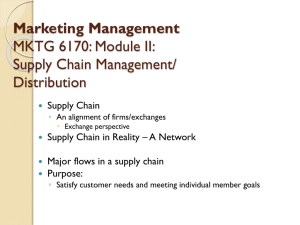
Using numerical techniques, we also computed for the three-variate case relative asymptotic efficiencies of the first eigenvector. In Figure 2 we see how these
efficiencies depend on γ = λ2 /λ1 and δ = λ3 /λ2 , the relative magnitudes of the
different eigenvalues. Again we see that maximal efficiency of k/(k + 2) = 0.6 is
attained when we tend to the spherical case. Efficiencies tend to zero when the
last two eigenvalues become negligible, but not when only δ tends to zero. Except
for the extreme cases, where there is a huge disproportion between the first and
the other two eigenvalues, we can say that the efficiencies are fairly close to their
maximal value. The plot for the efficiency of the second eigenvector estimate is
very similar and not represented here.
10
Croux, Ollila, and Oja
0.7
0.6
Efficiency
0.5
0.4
0.3
0.2
0.1
0
1
0.8
1
0.6
0.8
0.6
0.4
0.4
0.2
0.2
0
delta
0
gamma
Figure 2. Asymptotic relative efficiency of the first eigenvector
estimate based on the spatial SCM w.r.t. the estimate based on
the sample covariance matrix for k = 3 at a normal distribution
N (0, diag(λ1 , λ2 , λ3 )) as a function of γ = λ2 /λ1 and δ = λ3 /λ2
4.2. A remark on the limit distribution of squared angular distances
Until now, we worked with the trace of the covariance matrix to measure efficiencies. Another natural way to measure the accuracy of the estimate is to use the
angular distance between the estimate p̂j and the true value pj . Indeed, the eigenvectors are giving us interesting directions to project the data on, and we are often
more interested in the direction than in the components of the eigenvector. Below
we give the limiting distribution of the squared angular distance of an eigenvector
estimator based on regular affine equivariant scatter matrix estimators or on the
spatial SCM.
³
´2
Proposition 4.2. Under general assumptions, n cos−1 (|p̂Tj pj | has a limiting distribution given by
X¡
¢
pTl ASV(pj ; F )pl χ2l (1),
l6=j
where χ21 (1), ..., χ2k (1) are independent chi squared variables with one degree of
freedom.
(The above result follows from propositions 3.1 and 4.1, combined with
√
P
(pˆj T pj )2 = 1 − l6=j (p̂Tj pl )2 , (cos−1 1 − u)2 ≈ u for u small, and standard
Sign and rank covariance matrices
11
asymptotics). It is now nice to see that the limiting expectations of the squared
angular distances converge to the trace of the limiting covariance matrix of the
eigenvector estimate:
³
´2
lim nE[ cos−1 |p̂Tj pj | ] = T race(ASV(pj ; F )).
(4.2)
n
4.3. Simulation study
In the preceding section large-sample efficiencies were obtained for the spatial SCM
eigenvector estimates relative to corresponding estimates based on the sample
covariance matrix. In this section, finite-sample efficiencies are obtained by means
of a modest simulation study.
We take an almost identical simulation setup as in [9], were simulations have
been performed for the affine equivariant SCM. For m = 10000 samples of sizes
n = 20, 50, 100, 300, 1000, observations were generated from a k-variate elliptical
t-distribution with ν degrees of freedom and covariance matrix Σ = diag(1, . . . , k).
Our choices are k = 2, 3 and ν = 1, 5, 6, 8, 15, ∞. Please note that ν = ∞ corresponds to multivariate normal samples.
The estimated quantity is the direction of the first eigenvector. The error in
direction is given by the angle cos−1 (|pT1 p̂1 |). The mean squared angular distance
over all simulations is then
m
MSE(p̂1 ) =
1 X
(i)
cos−1 (|pT1 p̂1 |)2
m i=1
(i)
where p̂1 is the estimate computed from the ith generated sample. The relative
efficiencies reported in Table 1 are the ratios of these MSEs. It follows from (4.2)
that these relative efficiencies tend asymptotically to (3.2).
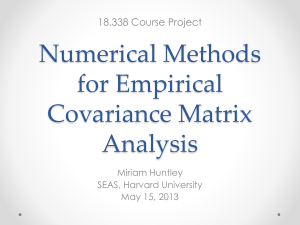
First of all, note that the finite sample efficiencies converge well to the asymptotic ones listed under n = ∞. An exception is of course the case ν = 1, where
the population covariance matrix is not existing. However, the scatter matrix of
this multivariate t(1) distribution can still be estimated with the spatial SCM.
Existence of the population spatial SCM does indeed not require any moment
conditions. Somewhat slower convergence is seen at ν = 5, and the efficiencies for
k = 3 are significantly larger than for k = 2. Note that for heavy tailed distributions, the spatial SCM outperforms the classical estimator. It turns out that
although the efficiencies are not so high as for the affine equivariant SCM, they
are still fairly large, certainly in higher dimensions. Taking into account the good
robustness properties, and the ease of computation of the spatial SCM, we may
conclude that this approach is an excellent competitor of other existing procedures
for robust principal components analysis.
12
Croux, Ollila, and Oja
Table 1. Simulated finite sample efficiencies of the first eigenvector estimates based on the spatial SCM relative to eigenvector
estimates based on the sample covariance matrix. Samples are
generated from a k-variate t-distribution with ν degrees of freedom and Σ = diag(1, . . . , k).
k=2
k=3
n = 20
n = 50
n = 100
n = 300
n = 1000
n=∞
n = 20
n = 50
n = 100
n = 300
n = 1000
n=∞
1
1.679
3.738
8.472
32.52
120.5
∞
1.523
2.563
4.312
15.92
64.69
∞
Degrees of freedom
5
6
8
15
0.798 0.757 0.701 0.634
0.890 0.756 0.634 0.508
0.979 0.816 0.653 0.495
1.193 0.926 0.679 0.551
1.215 0.942 0.724 0.564
1.456 0.971 0.728 0.574
0.948 0.915 0.870 0.816
1.049 0.952 0.836 0.732
1.124 0.963 0.839 0.651
1.496 1.096 0.849 0.611
1.637 1.174 0.908 0.669
1.750 1.167 0.875 0.689
∞
0.566
0.425
0.388
0.475
0.477
0.485
0.745
0.646
0.547
0.536
0.577
0.583
References
[1] F. Critchley, Influence in principal components analysis. Biometrika 72 (1985), 627–
636.
[2] C. Croux, and G. Haesbroeck, Principal component analysis based on robust estimators of the covariance and correlation matrix: influence functions and efficiencies.
Biometrika 87 (2000), 603–618.
[3] T.P. Hettmansperger, and R. Randles, A practical affine equivariant multivariate median. Biometrika (2002), to appear.
[4] N. Locantore, J.S. Marron, D.G. Simpson, N. Tripoli, J.T. Zhang, and K.L. Cohen,
Robust principal components for functional data. Test 8 (1999), 1–73.
[5] J. I. Marden, Some robust estimates of principal components. Statistics and Probability Letters 43 (1999), 349–359.
[6] H. Oja, Affine invariant multivariate sign and rank tests and corresponding estimates:
a review. Scandanavian Journal of Statistics 26 (1999), 319-343.
[7] H. Oja, Descriptive statistics for multivariate distributions. Statistics and Probability
Letters 1 (1983), 327–332.
[8] E. Ollila, T.P. Hettmansperger, and H. Oja, Affine equivariant multivariate sign methods. Submitted (2001a).
[9] E. Ollila, H. Oja, and C. Croux, The affine equivariant sign covariance matrix: asymptotic behaviour and efficiencies. Submitted (2001b).
[10] E. Ollila, C. Croux, and H. Oja, Influence functions and asymptotic efficiency of the
affine equivariant rank covariance matrix. Submitted (2002a).
Sign and rank covariance matrices
13
[11] E. Ollila, T.P. Hettmansperger, and H. Oja, Estimates of regression coefficients
based on the sign covariance matrix. Journal of the Royal Statistical Society, Series B
(2002b), to appear.
[12] D.E. Tyler, A distribution-free M-estimator of multivariate scatter. The Annals of
Statistics 15 (1987), 234-251.
[13] S. Visuri, V. Koivunen, and H. Oja , Sign and rank covariance matrices. Journal of
Statistical Planning and Inference 91 (2000) , 557-575.
[14] S. Visuri, E. Ollila, V. Koivunen, J. Möttönen, and H. Oja, Affine equivariant multivariate rank methods. Journal of Statistical Planning and Inference (2001), to appear.
[15] S. Visuri, E. Ollila, V. Koivunen, J. Möttönen, and H. Oja, Affine equivariant multivariate rank methods. Journal of Statistical Planning and Inference (2001), to appear.
[16] S. Visuri, H. Oja, and V. Koivunen, Robust subspace DoA estimation for wireless
communications. Proceedings of the IEEE 51st Vehicular Technology Conference,
Tokyo, Japan, (2000), 2511-2555.
Department of Applied Economics, University of Leuven, Naamsestraat 69, B-3000
Leuven, Belgium
E-mail address: christophe.croux@econ.kuleuven.be
Department of Mathematics and Statistics, University of Jyväskylä, P.O. Box 35,
FIN-40351 Jyväskylä, Finland
E-mail address: esaolli@cc.jyu.fi
Department of Mathematics and Statistics, University of Jyväskylä, P.O. Box 35,
FIN-40351 Jyväskylä, Finland
E-mail address: ojahannu@maths.jyu.fi