Shooting Methods for Numerical Solution of Stochastic Boundary
advertisement

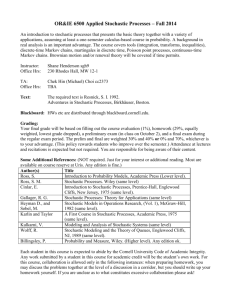
STOCHASTIC ANALYSIS AND APPLICATIONS Vol. 22, No. 5, pp. 1295–1314, 2004 Shooting Methods for Numerical Solution of Stochastic Boundary-Value Problems Armando Arciniega and Edward Allen* Department of Mathematics and Statistics, Texas Tech University, Lubbock, Texas, USA ABSTRACT In the present investigation, numerical methods are developed for approximate solution of stochastic boundary-value problems. In particular, shooting methods are examined for numerically solving systems of Stratonovich boundary-value problems. It is proved that these methods accurately approximate the solutions of stochastic boundary-value problems. An error analysis of these methods is performed. Computational simulations are given. Key Words: Shooting methods; Numerical solutions; Stochastic boundary-value problems; Ito and Stratonovich stochastic differential equations. *Correspondence: Edward Allen, Department of Mathematics and Statistics, Texas Tech University, Lubbock, Texas 79409-1042, USA; Fax: (806) 742-1112; E-mail: eallen@math.ttu.edu. 1295 DOI: 10.1081/SAP-200026465 Copyright # 2004 by Marcel Dekker, Inc. 0736-2994 (Print); 1532-9356 (Online) www.dekker.com ORDER REPRINTS 1296 Arciniega and Allen Mathematics Subject Classification: 65C30; 60H10. 1. INTRODUCTION Methods for numerically solving stochastic initial-value problems have been under much study (see, for example, Refs.[3–5,8,9] and the references therein). However, the theory and numerical solution of stochastic boundary-value problems have received less attention. In the present investigation, shooting methods are applied to numerically solve systems of Stratonovich boundary-value problems. The following linear stochastic system with boundary conditions is the object of interest in the present investigation: 8 k X > < d~ uðtÞ ¼ ðA~ uðtÞ þ ~ aðtÞÞdt þ ðBi~ uðtÞ þ ~ bi ðtÞÞ dWi ðtÞ; 0 t 1 > : uð0Þ þ F1~ uð1Þ ¼ ~ 0; F0~ i¼1 ð1:1Þ where ~ u, ~ a, ~ bi 2 Rn and A, F0 , F1 , Bi are n n matrices, and where the stochastic integrals for this problem are understood in the sense of Stratonovich integrals. In addition, it is assumed that b0 F F0 ¼ 0 and F1 ¼ 0 b1 F b1 is a ðn lÞ n matrix of rank b0 is a l n matrix of rank l and F where F n l. Also, 0 < l < n. Ocone and Pardoux[6] and Zeitouni and Dembo[10] have established existence and uniqueness of solutions to Eq. (1.1). As u 2 Rn is a solution to Eq. (1.1) if ~ u is Stratonovich defined in Ref.[10], ~ integrable and satisfies for all t 2 ½0; 1: 8 Z t Z tX k > <~ uðtÞ ~ uð0Þ ¼ ðA~ uðsÞ þ ~ aðsÞÞds þ ðBi~ uðsÞ þ ~ bi ðsÞÞ dWi ðsÞ; 0 0 i¼1 > : F0~ uð0Þ þ F1~ uð1Þ ¼ ~ 0: ð1:2Þ System (1.1) is an anticipative problem as the solution at any position is dependent on the Brownian motion beyond that position. However, ORDER REPRINTS Shooting Methods for Numerical Solution 1297 Ocone and Pardoux[6] and Zeitouni and Dembo[10] show that solutions to Eq. (1.1) can be defined as standard Stratonovich-type stochastic integrals. In the present investigation, shooting methods are applied to numerically solve Eq. (1.1) and error analyses are performed. A much simpler two-dimensional form of Eq. (1.1) was investigated by Allen and Nunn[1] who studied shooting and finite-difference numerical schemes for approximating the solution. A shooting method for numerically approximating the solution of Eq. (1.1) is now described. To describe this shooting method, consider the stochastic initial-value system: d~ um ðtÞ ¼ ðA~ um ðtÞ þ ~ aðtÞÞdt þ k X ðBi~ bi ðtÞÞ dWi ðtÞ; um ðtÞ þ ~ ð1:3Þ i¼1 0, and ~ um ð0Þ for m ¼ for m ¼ 1; 2; . . . ; n l þ 1, where ~ u1 ð0Þ ¼ ~ 2; 3; . . . ; n l þ 1 are chosen to be n l linearly independent vectors in the null space of F0 . The stochastic system (1.3) is a system of initial-value problems rather than a boundary-value problem. In effect, (1.1) is replaced by system (1.3). The ~ um ðtÞ obtained using (1.3) can be combined to form a solution to Eq. (1.1). To see this, let ~ uðtÞ ¼ nlþ1 X ð1:4Þ lm~ um ðtÞ; m¼1 where the lm , 1 m n l þ 1, satisfy nlþ1 X ð1:5Þ lm ¼ 1 m¼1 and the linear system of rank ðn lÞ: nlþ1 X m¼1 lm ðF0~ um ð0Þ þ F1~ um ð1ÞÞ ¼ nlþ1 X lm F1~ 0: um ð1Þ ¼ ~ ð1:6Þ m¼1 In the next section, it is shown that the solution ~ uðtÞ, of (1.1) can be written as given by (1.4) where the ~ um ðtÞ, for m ¼ 1; 2; . . . ; n l þ 1, satisfy (1.3). As system (1.3) is a stochastic initial-value system, standard numerical methods such as Euler’s or Milstein’s method (see for example Refs.[3,4]) can be applied to approximate the solution of (1.3) at discrete times. Using (1.5) and (1.6), the values of lm can be calculated uniquely and the solution ~ uðtÞ can be approximated by combining the approximate ORDER REPRINTS 1298 Arciniega and Allen solutions using (1.4). This approach is described in the third section along with an error analysis. Finally, computational results are given to illustrate the procedure. 2. SOLVABILITY USING THE SHOOTING METHOD In this section, it is verified that the shooting method procedure yields the solution to the original stochastic boundary-value problem (1.1). Clearly, if ~ uðtÞ is given by (1.4), then ~ uðtÞ satisfies (1.1) as d~ uðtÞ ¼ nlþ1 X lm d~ um ðtÞ m¼1 ¼ nlþ1 X lm ðA~ um ðtÞ þ ~ aðtÞÞdt þ m¼1 k X ! ðBi~ bi ðtÞÞ dWi ðtÞ um ðtÞ þ ~ i¼1 ¼ ðA~ uðtÞ þ ~ aðtÞÞdt þ k X ðBi~ uðtÞ þ ~ bi ðtÞÞ dWi ðtÞ; i¼1 where (1.5) has been applied, that is, nlþ1 X lm ¼ 1: m¼1 Also, the boundary conditions are satisfied as: F0~ uð0Þ þ F1~ uð1Þ ¼ nlþ1 X lm ðF0~ um ð0Þ þ F1~ um ð1ÞÞ m¼1 ¼ nlþ1 X lm F1~ 0; um ð1Þ ¼ ~ m¼1 as ~ u1 ð0Þ ¼ ~ 0 and ~ um ð0Þ are linearly independent null space Pnlþ1 vectors in the ~ ~ l F ð1Þ ¼ 0 . The next of F0 for m ¼ 2; 3; . . . ; n l þ 1, and u m 1 m m¼1 theorem shows that the lm , 1 m n l þ 1, satisfying Eqs. (1.5) and (1.6) can be uniquely determined. Thus, the solution of the original stochastic boundary-value problem (1.1) is obtained using (1.4) by combining the solutions ~ um ðtÞ of the initial-value problems (1.3). ORDER REPRINTS Shooting Methods for Numerical Solution 1299 Theorem 2.1. The lm , 1 m n l þ 1 uniquely exist and satisfy Eqs. (1.5) and (1.6). Proof. For the original stochastic boundary-value problem: 8 d~ uðtÞ ¼ ðA~ uðtÞ þ ~ aðtÞÞdt > > > k < X þ ðBi~ uðtÞ þ ~ bi ðtÞÞ dWi ðtÞ; 0 t 1 > > i¼1 > : F0~ uð0Þ þ F1~ uð1Þ ¼ ~ 0; ð2:1Þ the solution ~ uðtÞ uniquely exists, which is proved in Refs.[6,10]. Consider the corresponding stochastic initial-value problem: 8 d~ u1 ðtÞ ¼ ðA~ u1 ðtÞ þ ~ aðtÞÞdt > > > k < X þ ðBi~ bi ðtÞÞ dWi ðtÞ; 0 t 1 u1 ðtÞ þ ~ ð2:2Þ > > i¼1 > : ~ 0; u1 ð0Þ ¼ ~ It is well-known that ~ u1 ðtÞ is uniquely determined for this problem (see, for example, Refs.[2–4]). Subtracting Eqs. (2.1) and (2.2) yields: 8 k X > < ðBi ~ d~ wðtÞ ¼ A~ wðtÞdt þ wðtÞÞ dWi ðtÞ; 0 t 1 ð2:3Þ i¼1 > : F0 ~ wð0Þ þ F1 ~ wð1Þ ¼ F1~ u1 ð1Þ; where ~ wðtÞ ¼ ~ uðtÞ ~ u1 ðtÞ. As ~ uðtÞ and ~ u1 ðtÞ uniquely exist, then ~ wðtÞ also uniquely exists. In particular, ~ wð0Þ ¼ ~ uð0Þ exists. Consider, next " # b0 ~ b0 F wð0Þ F ~ F0 ~ wð0Þ ¼ wð0Þ ¼ ~ 0 0 and wð1Þ ¼ F1 ~ 0 b F1 ~ wð1Þ ¼ Then, wð0Þ þ F1 ~ wð1Þ ¼ F0 ~ " ~ 0 : b1 ~ F wð1Þ b0 ~ wð0Þ F b wð1Þ F1 ~ # ~ 0 : ¼ b1~ u1 ð1Þ F wð0Þ is in the null space Thus F0 ~ wð0Þ ¼ ~ 0 and F1~ wð1Þ ¼ F1~ u1 ð1Þ. Hence ~ of F0 . However, the null space of F0 and the range of F1 are identical, ORDER REPRINTS 1300 Arciniega and Allen i.e., NullðF0 Þ ¼ RangeðF1 Þ. Furthermore, dimðRangeðF1 ÞÞ ¼ n l ¼ dimðNullðF0 ÞÞ. Therefore, one can let ~ wð0Þ ¼ nlþ1 X lm~ vm ð0Þ; m¼2 where ~ vm ð0Þ ¼ ~ um ð0Þ are linearly independent vectors in the range of F1 and flm gnlþ1 are to be determined. However, as ~ wð0Þ 2 NullðF0 Þ, m¼2 flm gnlþ1 uniquely exist. Consider now the stochastic initial-value problem: m¼2 8 k X > > > wðtÞ ¼ A~ wðtÞdt þ ðBi~ wðtÞÞ dWi ðtÞ; 0 t 1 > d~ < i¼1 ð2:4Þ nlþ1 X > > > > lm~ wð0Þ ¼ vm ð0Þ: :~ m¼2 Therefore, (2.4) has a unique solution. As (2.3) and (2.4) have unique solutions, the solutions agree by the above argument. Now consider ~ um ðtÞ ~ u1 ðtÞ that solves the stochastic initial-value problem: vm ðtÞ ¼ ~ 8 k X > < d~ vm ðtÞ ¼ A~ vm ðtÞdt þ ðBi~ vm ðtÞÞ dWi ðtÞ; 0 t 1 ð2:5Þ i¼1 > : F0~ 0; vm ð0Þ ¼ ~ for m ¼ 2; 3; . . . ; n l þ 1. Then, it is clear that ~ wðtÞ ¼ nlþ1 X lm~ vm ðtÞ: m¼2 Thus, wð1Þ ¼ F1~ u1 ð1Þ, then l2 ; l3 ; . . . ; lnlþ1 Pnlþ1 as F1~ ~ ~ l ð1Þ ¼ F ð1Þ. Finally, notice that v u m m 1 1 m¼2 satisfy ~ uðtÞ ¼ ~ wðtÞ þ ~ u1 ðtÞ: Therefore, ~ uðtÞ ¼ ~ u1 ðtÞ þ nlþ1 X lm~ u1 ðtÞ þ vm ðtÞ ¼ ~ m¼2 Thus, ~ uðtÞ ¼ nlþ1 X m¼1 lm~ um ðtÞ; nlþ1 X m¼2 lm ð~ um ðtÞ ~ u1 ðtÞÞ: F1 ORDER REPRINTS Shooting Methods for Numerical Solution 1301 where F1 nlþ1 X lm ð~ um ð1Þ ~ u1 ð1ÞÞ ¼ F1~ u1 ð1Þ; m¼2 nlþ1 X lm ¼ 1; m¼1 0 for each m ¼ 1; 2; . . . ; n 1 þ l: Thus, lm , m ¼ and F0~ vm ð0Þ ¼ ~ 1; 2; . . . ; n l þ 1, uniquely exist and satisfy (1.5) and (1.6). & 3. NUMERICAL SOLUTION AND ERROR ANALYSIS In this section, error analyses for numerical solution of system (1.3) are performed. Then, it is verified that Eq. (1.4) yields correspondingly accurate approximations to ~ uðtÞ in the original stochastic boundary-value problem (1.1). Two numerical methods are considered to numerically solve system (1.3), namely, Euler’s method and Milstein’s method. The approximate solutions obtained by numerically solving (1.3) are then combined to approximate the solution of (1.1) using (1.4). To perform an error analysis, it is useful to convert the Stratonovich system (1.3) to its corresponding Ito system. The Ito form of system (1.3) is given by (see Ref.[4]): ðA~ um ðtÞ þ ~ aðtÞÞ þ d~ um ðtÞ ¼ þ k X k 1X bj ðtÞÞ dt ðB2j~ um ðtÞ þ Bj~ 2 j¼1 ðBi~ bi ðtÞÞdWi ðtÞ: um ðtÞ þ ~ ð3:1Þ i¼1 System (3.1) is solved numerically rather than (1.3). By solving (3.1) one solves (1.3) as the two systems are equivalent. To solve (3.1) numerically, select a positive integer N 2 and partition the interval ½0; 1 into 0 ¼ t0 < t1 < < tN ¼ 1; where tp ¼ ph for each p ¼ 0; 1; . . . ; N . It is assumed that the step size h is fixed, so that the common distance between the discrete times is h ¼ N1 . For example, the Euler approximations to system (3.1) are stochastic ORDER REPRINTS 1302 Arciniega and Allen processes satisfying the iterative scheme (see Refs.[3,4]): ~ um;pþ1 k 1X bj ðtp ÞÞ ¼~ um;p þ h ðA~ um;p þ ~ aðtp ÞÞ þ ðB2~ um;p þ Bj~ 2 j¼1 j þ k X pffiffiffi ðBi~ bi ðtp ÞÞ hZi ; um;p þ ~ ð3:2Þ i¼1 for each m ¼ 1; 2; . . . ; n l þ 1. In the above scheme, ~ um;p denotes the approximation to the exact solution at the pth time step. That is ~ um ðtp Þ, for each p ¼ 0; 1; . . . ; N 1, m ¼ 1; 2; . . . ; n l þ 1. Also, um;p ~ the random increments Zi are independent normal random variables with mean zero and variance unity, i.e., Zi 2 N ð0; 1Þ (see Ref.[4]). After (3.2) is solved numerically for each m ¼ 1; 2; . . . ; n l þ 1, the approximate ^lm , for m ¼ 1; 2; . . . ; n l þ 1, are calculated using nlþ1 X ^ lm ðF0~ um;N þ F1~ um;N Þ ¼ m¼1 nlþ1 X ^lm F1~ 0 um;N ¼ ~ m¼1 with nlþ1 X ^ lm ¼ 1 m¼1 corresponding to (1.5) and (1.6). As a result, ~ uðtp Þ nlþ1 X ^ lm~ um;p m¼1 corresponding to (1.4). The theorem below is a well-known result concerning the strong convergence of Euler’s method for stochastic differential equations (see Refs.[3,4,8]). To be consistent with existing literature, the following notation is used in the present investigation. In particular, denote k 1X ~ bj ðtÞÞ f ðt;~ um ðtÞÞ ¼ ðA~ um ðtÞ þ ~ aðtÞÞ þ ðB2~ um ðtÞ þ Bj~ 2 j¼1 j and Gðt;~ um ðtÞÞ ¼ k X i¼1 ðBi~ bi ðtÞÞ: um ðtÞ þ ~ ORDER REPRINTS Shooting Methods for Numerical Solution 1303 Then, the system ~ ðtÞ d~ um ðtÞ ¼ ~ f ðt;~ um ðtÞÞdt þ Gðt;~ um ðtÞÞdW is equivalent to (3.1). In the above system, ~ f ¼ ffi g is an n-vector-valued function, G ¼ fgi;j g is an n k-matrix-valued function, ~ ¼ fWi g is a k-dimensional Wiener process, W and the solution ~ um is an n-dimensional process. The above system can be expressed as d~ um ðtÞ ¼ ~ f ðt;~ um ðtÞÞ dt þ k X ~ um ðtÞÞ dWi ðtÞ; gi ðt;~ i¼1 where the ~ gi are the columns of the matrix G and the Wi are the indepen~. dent scalar Wiener processes forming the components of W Theorem 3.1. Consider the system of Ito stochastic differential equations, ~ ðtÞ f ðt;~ um ðtÞÞdt þ Gðt;~ um ðtÞÞdW d~ um ðtÞ ¼ ~ ~ 2 Rk . for m ¼ 1; 2; . . . ; n l þ 1, where ~ f 2 Rn , G 2 Rnk , and W ~ Suppose f and G satisfy uniform growth and Lipschitz conditions in the second variable, and are Hölder continuous of order 12 in the first variable. Specifically, there exists a constant Km > 0 for each m ¼ vm 2 Rn , 1; . . . ; n l þ 1 such that for all s; t 2 ½0; 1, ~ um ;~ jj~ f ðt;~ um ðtÞÞ ~ f ðt;~ vm ðtÞÞjj þ jjGðt;~ um ðtÞÞ Gðt;~ vm ðtÞÞjj vm jj Kjj~ um ~ ð3:3Þ 2 jj~ f ðt;~ um ðtÞÞjj þ jjGðt;~ um ðtÞÞjj2 K2 ð1 þ jj~ um jj2 Þ ð3:4Þ 1 jj~ f ðs;~ um ðtÞÞ ~ f ðt;~ um ðtÞÞjj þ jjGðs;~ um ðtÞÞ Gðt;~ um ðtÞÞjj Kjjs tjj2 : ð3:5Þ ORDER REPRINTS 1304 Arciniega and Allen Then, there exists a positive constant Cm such that Ejj~ um ðtp Þ ~ um;p jj2 Cm h for each m ¼ 1; 2; . . . ; n l þ 1, where jjjj is the Euclidean norm. In Theorem 3.1, the Eqs. (3.3) and (3.4) guarantee existence and uniqueness of solutions of the Ito stochastic differential equations and equation (3.5) guarantees the convergence of the Euler method (see Refs.[2–4]). A second method to numerically approximate the solution of system (3.1) is the Milstein method (see Ref.[4]): ~ um;pþ1 k 1X bj ðtp ÞÞ ¼~ um;p þ h ðA~ um;p þ ~ aðtp ÞÞ þ ðB2~ um;p þ Bj~ 2 j¼1 j þ k k X X pffiffiffi bj 1 ; ðBi~ bi ðtp ÞÞ hZi þ Iðj1 ;j2 Þ Bj2 Bj1~ um;p þ ~ um;p þ Bj2~ j1 ;j2 i¼1 ð3:6Þ where Z 8 > > I ¼ ðj ;j Þ < 1 2 > > :I ðj1 ;j1 Þ tnþ1 tn Z s1 tn dWsj21 dWsj12 ; j1 6¼ j2 ð3:7Þ 1 ðDWj1 Þ2 h : ¼ 2 The last term in Eq. (3.6) differentiates Milstein’s method from Euler’s method. Notice that Milstein’s method is complicated for general problems, due to the evaluation of Iðj1 ;j2 Þ . If ~ bj ðtÞ ¼ ~ 0 for j ¼ 1; 2; . . . ; k and Bj2 Bj1 ¼ Bj1 Bj2 for j1 ; j2 ¼ 1; 2; . . . ; k, then Milstein’s method becomes: k pffiffiffi X ~ um;p þ h ðA~ um;p þ ~ aðtp ÞÞ þ Bi~ um;p hZi um;pþ1 ¼ ~ i¼1 þ k X k 1X 2 j1 ðDWj1 ÞðDWj2 ÞBj2 Bj1~ um;p ; ð3:8Þ j2 and the evaluation of Iðj1 ;j2 Þ is not required. The following theorem states that Milstein’s method has second-order strong convergence in the mean ORDER REPRINTS Shooting Methods for Numerical Solution 1305 square error as compared with Euler’s method, which has first-order strong convergence (see Refs.[3,4]). Theorem 3.2. Under the hypotheses of Theorem 3.1 for the Milstein approximations (3.6), the following estimate holds: Ejj~ um ðtp Þ ~ um;p jj2 Cm h2 for each m ¼ 1; 2; . . . ; n l þ 1. In the next two theorems, it is shown that for the shooting method the errors between the exact and approximate solutions are small. Theorem 3.3. The error in estimating ~ l is of the same order as the error in estimating the solutions of the initial-value problems. Proof. Consider the equations nlþ1 X lm F1~ 0; um ð1Þ ¼ ~ ð3:9Þ m¼1 and, l1 ¼ 1 nlþ1 X lm : ð3:10Þ m¼2 Substituting Eq. (3.10) into Eq. (3.9) and rearranging terms yields nlþ1 X lm F1 ð~ um ð1Þ ~ u1 ð1ÞÞ ¼ F1~ u1 ð1Þ: ð3:11Þ m¼2 But F1 ¼ 0 b1 F b1 is a ðn lÞ n matrix of rank n l. Thus, the equation in (3.11) where F is a linear system of the form A~ l ¼~ b; ð3:12Þ where A is an ðn lÞ ðn lÞ matrix, ~ l and ~ b are vectors of length ~ b a1 ; . . . ;~ anl , where u1 ð1Þ and A ¼ ½~ n l. In particular, b ¼ F1~ ORDER REPRINTS 1306 Arciniega and Allen b1 ½~ ~ ai ¼ F uiþ1 ð1Þ ~ u1 ð1Þ. Then, ~ l ¼ A1~ b: ð3:13Þ In numerical solution of the initial-value problem (3.1) the ~ um ð1Þ, for m ¼ 2; . . . ; n l þ 1 are being approximated by ~ u^m ð1Þ. Therefore, the linear system to be solved is an approximation of (3.12). Call this linear system ^ ^ b~ b; l¼ ~ A ð3:14Þ ^ b ¼½~ b1~ b1 ½~ a^1 ;...;~ where A a^nl , ~ a^i ¼ F b ¼F u^1 ð1Þ. Howu^iþ1 ~ u^1 ð1Þ, and ~ ^ b and ~ b are perturbations ever, notice by Theorems 3.1 and 3.2, that A to A and ~ b for small time step h. It is well-known (see, e.g., Ref.[7]) that # " #" ^ b jj jj~ bjj jjAjjjjA1 jj jjA A b ~ ^ ~ ~ ~ þ : jjl ljj jjljj b jj jjAjj jj~ bjj 1 jjA1 jjjjA A Hence, 0 " ^ ljj @E Ejj~ l ~ jj~ ljjjjA1 jj #2 11=2 1=2 A b jj2 EjjA A b jj 1 jjA1 jjjjA A 0 " #2 11=2 1=2 1 ~ jj l jjjjAjjjjA jj ^ A bjj2 þ @E Ejj~ b ~ : b jjÞ jj~ bjjð1 jjA1 jjjjA A ^ ljj is proportional to the error obtained in estiThus, the error Ejj~ l ~ mating ~ um ð1Þ using, for example, Euler’s method or Milstein’s method. This completes the proof of the theorem. & Theorem 3.4. Let ~ uðtÞ be the exact solution of the boundary-value problem (1.1) and ~ u^ðtÞ the approximate solution obtained using the initial-value system (3.1). Then, Ejj~ uðtp Þ ~ u^ðtp Þjj1=2 !1=2 nlþ1 X Ejlm j m¼1 ^ 1=2 ljj þ Ejj~ l ~ nlþ1 X !1=2 Ejj~ um ðtp Þ ~ um;p jj m¼1 nlþ1 X m¼1 !1=2 Ejj~ um;p jj : ORDER REPRINTS Shooting Methods for Numerical Solution 1307 Proof. Consider ~ u^ðtp Þ ¼ nlþ1 X ^ lm~ uðtp Þ: um;p ~ m¼1 Then, ~ uðtp Þ ~ u^ðtp Þ ¼ nlþ1 X lm~ um ðtp Þ ^lm~ um;p m¼1 ¼ nlþ1 X lm ð~ um ðtp Þ ~ um;p Þ þ nlþ1 X m¼1 ðlm ^lm Þ~ um;p : ð3:15Þ m¼1 As a result, Ejj~ uðtp Þ ~ u^ðtp Þjj1=2 nlþ1 X E 2 E4 !1=2 jlm jjj~ um ðtp Þ ~ um;p jj m¼1 !1=4 jlm j2 nlþ1 X m¼1 þ E4 !1=4 3 5 jj~ um ðtp Þ ~ um;p jj2 m¼1 nlþ1 X !1=4 jlm ^lm j2 m¼1 00 @@E þE !1=2 jlm ^lm jjj~ um;p jj m¼1 nlþ1 X 2 nlþ1 X nlþ1 X nlþ1 X !1=4 3 5 jj~ um;p jj2 m¼1 !1=2 jlm j2 111=2 0 0 AA @E@ m¼1 nlþ1 X !1=2 111=2 AA jj~ um ðtp Þ ~ um;p jj2 m¼1 0 0 nlþ1 X ^ 1=2 ljj @E@ þ Ejj~ l ~ jj~ um;p jj2 !1=2 111=2 AA m¼1 nlþ1 X !1=2 Ejlm j m¼1 ^ 1=2 ljj þ Ejj~ l ~ nlþ1 X !1=2 Ejj~ um ðtp Þ ~ um;p jj m¼1 nlþ1 X m¼1 !1=2 Ejj~ um;p jj ; ð3:16Þ ORDER REPRINTS 1308 Arciniega and Allen using the Cauchy-Schwarz inequality and the inequality: vffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi u N N X uX t jai j2 jai j: i¼1 i¼1 & This completes the proof. Note by Theorems 3.1–3.4, the numerical method is convergent with accuracy determined by the order of accuracy of the methods used to approximately solve the initial-value problems. 4. COMPUTATIONAL RESULTS In this section, computational results are given to test the numerical method developed in the present investigation. A description of an interesting first problem is presented here (see Ref.[1].) Consider the second-order two-point stochastic boundary-value problem: 8 00 j ðxÞ ¼ ð1 þ jðxÞÞdx þ jðxÞ dWðxÞ > > < jð0Þ ¼ 0 > > : jð1Þ ¼ 0: ð4:1Þ Letting y1 ðxÞ ¼ jðxÞ and y2 ðxÞ ¼ j0 ðxÞ, Eq. (4.1) becomes: 8 dy1 ðxÞ ¼ y2 ðxÞdx > > > > > < dy2 ðxÞ ¼ ð1 þ y1 ðxÞÞdx þ y1 ðxÞ dWðxÞ ð4:2Þ > y1 ð0Þ ¼ 0 > > > > : y1 ð1Þ ¼ 0: Now, letting u1 ðtÞ ¼ y1 ðxÞ, u2 ðtÞ ¼ y2 ðxÞ, with t ¼ x, Eq. (4.2) becomes: 8 d~ uðtÞ ¼ ðA~ uðtÞ þ ~ aðtÞÞdt > > > > 2 < X ðBi~ uðtÞ þ ~ bi ðtÞÞ dWi ðtÞ; þ > > i¼1 > > : uð0Þ þ F1~ uð1Þ ¼ ~ 0; F0~ 0t1 ð4:3Þ ORDER REPRINTS Shooting Methods for Numerical Solution 1309 where 0 ; 1 0 0 F1 ¼ ; 1 0 ~ aðtÞ ¼ A¼ 0 1 ~ b1 ¼ ~ 0; 1 ; 0 B1 ¼ ~ b2 ¼ ~ 0; 0 0 ; 1 0 and F0 ¼ 1 0 ; 0 0 B2 ¼ 0: Thus, problem (4.3) has the form # #! # " # " " #" #" 8 " u1 ðtÞ 0 0 0 u1 ðtÞ 0 1 u1 ðtÞ > > > d ¼ dt þ dW1 ðtÞ þ > > < u2 ðtÞ 1 1 0 u2 ðtÞ 1 0 u2 ðtÞ # " # " # " #" #" > > 1 0 u1 ð0Þ 0 0 u1 ð1Þ 0 > > > þ ¼ : 0 0 u2 ð0Þ 1 0 u2 ð1Þ 0 ð4:4Þ To solve this problem, consider two different solutions to a corresponding stochastic initial-value problem. Consider ~ um ðtÞ, m ¼ 1; 2 where 0 0 ~ u1 ð0Þ ¼ and ~ u2 ð0Þ ¼ : 0 1 The ~ um ðtÞ for m ¼ 1; 2 solve the stochastic initial-value problem: 8 0 0 0 0 1 > < d~ ~ ~ um ðtÞ ¼ þ um ðtÞ dWðtÞ um ðtÞ dt þ 1 1 0 1 0 > : for m ¼ 1; 2 where ~ um ð0Þ is given above : ð4:5Þ Notice that Eq. (4.5) is solved for both ~ u1 ðtÞ and ~ u2 ðtÞ using different initial conditions but the same Wiener process. Euler and Milstein methods are used for comparison in numerically solving the corresponding stochastic u2 ðtÞ are numerically solved to time initial-value problems. After ~ u1 ðtÞ and ~ t ¼ 1, they are combined to approximate the solution of the stochastic boundary-value problem (4.4). The numerical results are shown below. For this problem, the Euler and Milstein methods are identical. Also, the Ito form and the Stratonovich form of this problem are the same. Table 4.1 presents approximations of Eðu1 ð1=2ÞÞ and Eðu21 ð1=2ÞÞ using both, the Euler and Milstein methods. The approximate values are based on 100,000 independent trials. Figure 4.1 illustrates the average of the approximate solution with 100,000 independent trials, using both, the Euler and Milstein ORDER REPRINTS 1310 Arciniega and Allen Table 4.1. Approximate values of Eðu1 ð1=2ÞÞ and Eðu21 ð1=2ÞÞ. Euler shooting Number of intervals in t (h) 2 4 8 16 Milstein shooting Eu Eu2 Eu Eu2 0.1251 0.1169 0.1155 0.1153 0.0156 0.0138 0.0135 0.0135 0.1251 0.1169 0.1155 0.1153 0.0156 0.0138 0.0135 0.0135 Methods. Two particular trajectories of the solutions are also shown. Absolute errors of the numerical solution at time t ¼ 0:5 are shown in Figure 4.2 for Euler and Milstein methods. As a second example, consider the following two-point stochastic boundary-value problem: 8 2 X > < ðBi~ d~ uðtÞ ¼ ðA~ uðtÞ þ ~ aðtÞÞdt þ uðtÞ þ ~ bi ðtÞÞ dWi ðtÞ; 0 t 1 > : F0~ uð0Þ þ F1~ uð1Þ ¼ ~ 0 i¼1 ð4:6Þ Figure 4.1. Illustration of the average and two trajectories of the solution. ORDER REPRINTS Shooting Methods for Numerical Solution 1311 Figure 4.2. Illustration of the absolute errors for the first example. where 2 1 3 2 2 1 0 3 7 7 6 6 ~ aðtÞ ¼ 4 0 5; A ¼ 4 1 3 1 5; 0 1 4 1 2 3 2 2 1 0 1 0 1 6 7 6 B2 ¼ 4 1 2 1 5; F0 ¼ 4 0 0 10 0 1 2 0 0 ~ 0; b1 ¼ ~ 2 B1 ¼ 0 3 7 0 5; 0 1 0 0 3 7 1 0 5; 0 1 2 3 0 0 0 6 7 F1 ¼ 4 0 1 1 5; 0 1 1 1 6 40 10 0 ~ b2 ¼ ~ 0: As in the first example, the corresponding initial-value problem is solved numerically using three different initial conditions: 2 3 2 3 2 3 0 0 0 ~ u1 ð0Þ ¼ 4 0 5; ~ u2 ð0Þ ¼ 4 1 5; and ~ u3 ð0Þ ¼ 4 0 5: 0 0 1 The three numerical solutions are then combined to approximate the solution to the original boundary-value problem (4.6). Table 4.2 presents ORDER REPRINTS 1312 Arciniega and Allen Table 4.2. Approximate values of Eðu1 ð1=2ÞÞ and Eðu21 ð1=2ÞÞ. Euler shooting Number of intervals in t (h) 2 4 8 16 32 64 Milstein shooting Eu Eu2 Eu Eu2 0.4493 0.5256 0.5729 0.5988 0.6118 0.6183 0.2019 0.2771 0.3305 0.3620 0.3786 0.3872 0.4491 0.5262 0.5741 0.6002 0.6134 0.6200 0.2017 0.2777 0.3317 0.3637 0.3806 0.3893 approximations of Eðu1 ð1=2ÞÞ and Eðu21 ð1=2ÞÞ using both the Euler and Milstein methods. The approximate values are based on 100,000 independent trials. Notice that only the approximations of the first component of the vector are given. Although the exact values are unknown, the best estimates for Eðu1 ð1=2ÞÞ and Eðu21 ð1=2ÞÞ are, respectively, 0:6248 and 0:3960. Notice that Milstein’s method appears to converge Figure 4.3. Illustration of the average and two trajectories of the solution. ORDER REPRINTS Shooting Methods for Numerical Solution 1313 Figure 4.4. Illustration of the average and two trajectories of the solution. slightly faster than Euler’s method for this example. Figure 4.3 illustrates the average of the approximate solution with 100,000 independent trials, using Euler’s Method. Two particular trajectories of the solutions are also shown. Figure 4.4 illustrates the average of the approximate solution with 100,000 independent trials, using Milstein’s Method. Two particular trajectories of the solutions are also shown. 5. CONCLUSION Numerical methods were used to numerically solve a stochastic boundary-value system. In particular, shooting methods were examined for numerically solving systems of Stratonovich boundary-value problems. It was proved that these methods accurately approximate the solutions of stochastic boundary-value problems. Error analyses of these methods were performed. Computational simulations were given. ORDER REPRINTS 1314 Arciniega and Allen ACKNOWLEDGMENTS The research was supported by the Texas Advanced Research Program Grant ARP 0212-44-1582 and the National Science Foundation Grant DMS-0201105. REFERENCES 1. Allen, E.J.; Nunn, C.J. Difference methods for numerical solution of stochastic two-point boundary-value problems. In Proceedings of the First International Conference on Difference Equations; Elydi, S.N., Greef, J.R., Ladas, G, Peterson, A.C., Eds.; Gordan and Breach Publishers: Amsterdam, 1995. 2. Arnold, L. Stochastic Differential Equations: Theory and Applications; John Wiley & Sons: New York, 1974. 3. Gard, T.C. Introduction to Stochastic Differential Equations; Marcel Dekker: New York, 1988. 4. Kloeden, P.E.; Platen, E. Numerical Solution of Stochastic Differential Equations; Springer-Verlag: New York, 1992. 5. Kloeden, P.E.; Platen, E.; Schurz, H. Numerical Solution of SDE Through Computer Experiments; Springer-Verlag: Berlin, 1994. 6. Ocone, D.; Pardoux, E. Linear stochastic differential equations with boundary conditions. Probab. Theory Rel. Fields 1989, 82, 489–526. 7. Ortega, J.M. Numerical Analysis: A Second Course; Academic Press Inc.: London, 1972. 8. Talay, D. Simulation and numerical analysis of stochastic differential systems: A review. In Probabilistic Methods in Applied Physics; Lecture Notes in Physics; Springer-Verlag: New York, 1995; Vol. 451, 63–106. 9. Talay, D.; Turbano, L. Expansion of the global error for numerical schemes solving stochastic differential equations. Stoch. Anal. Appl. 1990, 8 (4), 483–509. 10. Zeitouni, O.; Dembo, A. A Change of variables formula for Stratonovich integrals and existence of solutions for two-point stochastic boundary value problems. Probab. Theory Rel. Fields 1990, 84, 411–425.