Uncertainty and Variability in Ocean Acoustics: How do We Cope?
advertisement

Acoustics 2002 - Innovation in Acoustics and Vibration
Annual Conference of the Australian Acoustical Society
13-15 November 2002, Adelaide, Australia
UNCERTAINTY AND VARIABILITY IN OCEAN ACOUSTICS:
HOW DO WE COPE?
David M.F. Chapman and Ronald T. Kessel
Defence R&D Canada – Atlantic
P.O. Box 1012, Dartmouth, Nova Scotia, Canada, B2Y 3Z7
david.chapman@drdc-rddc.gc.ca
1 INTRODUCTION
Our understanding of ocean acoustics has advanced considerably over the last century. The
physics, the mathematical analysis, and the computer models have matured to the point
that JLYHQVXIILFLHQWDQGYDOLGLQSXWV ZHFDQSUHGLFWDQGLQWHUSUHWDQRFHDQDFRXVWLFILHOG
with great precision. The constraints on computer power and time have eased, and we can
readily calculate acoustic fields of great complexity. However, the actual oceanographic and
geophysical environment is highly variable (both in time and in space) and our knowledge of
the environment is uncertain. How can we bridge the gap between (1) the precision of the
physics, mathematics, computation, and measurement of acoustic fields and (2) the inherent
variability in the governing environmental parameters and our uncertain knowledge of them?
Some insight is provided by analysing the following case: in a weakly range-dependent
shallow-water environment, adiabatic mode theory is a reasonable model of the acoustic field.
Both the mode functions and the mode wavenumbers vary somewhat with range, but the
resulting multimode interference pattern is acutely sensitive to variations in mode phase. (To
be more precise, it is the relative phase differences between pairs of modes that is important.)
In the case of a nominally range-independent environment with stochastic spatial variability,
how sensitive are the mode phase differences to the environmental variations? The
mathematical physics suggests that we need a combination of (1) a proper understanding of
the parameters that "matter" to the wavenumber, and (2) good statistical knowledge of the true
environmental parameters and their correlations in Nature. Although couched in the
terminology of underwater acoustics, the coordination of these aspects may be of interest in
other disciplines facing similar dilemmas in wave propagation.
We are interested, then, in the sensitivity of the ocean acoustic field to variability in the
acoustic environment, and to our uncertainty of the parameter values. By “variability”, we
mean unpredictable random variability of environmental parameters about an average
nominal environment. Normally, we parameterize the average environment in our models,
and the variations are either too complicated to accommodate through the introduction of new
parameters, or they remain unknown. For example, a smooth trend in water depth could be
modelled as a range-dependent environmental parameter, but stochastic variations of water
depth may be too detailed and complex to include in a numerical model; however, we may
wish to consider the effect of such variability, as represented by the statistics of the random
parameter. By “uncertainty” we refer to the difference between our estimate of the underlying
environmental parameters (including both bias and error) and their true mean values. Kessel1
considered range-dependent shallow water propagation within the adiabatic approximation, at
sufficiently long range that the mode phases become uniformly distributed. He showed that, if
ISBN 0-909882-19-3 © 2002 AAS
1
Not reviewed by Acoustics 2002 Scientific Committee
Acoustics 2002 - Innovation in Acoustics and Vibration
the environment is adequately parameterized, then the best-fit seabed model is the mean of the
true environment; whereas, if the model is poorly parameterized, then the best-fit model
results in parameter values that are pulled away from their true values, i.e., there is bias in the
derived environmental model. This is due to unaccounted mismatch of parameters that are
either truly hidden or wishfully ignored.
The effect of stochastic parameter variability could be viewed as an extreme case of an
insufficiently parameterized environment, in which there are very large numbers of hidden or
ignored parameters, each of which in isolation may have insignificant effect. In this paper, we
attempt to establish the basis for gauging the effect of environmental variability by extending
Kessel’s adiabatic mode phase analysis. There is some hope that we can develop a generalized
theory of “effective parameter” models, in which the values of all or some nominal
parameters of the best-fit model are biased by the omission or unaccounted variation of the
parameter set more closely describing the true environment.
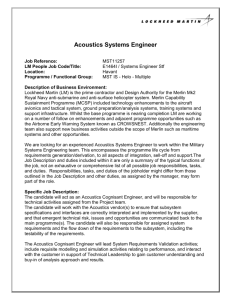
Before proceeding with the theoretical development of this problem, let us examine the
sensitivity of the acoustic field to a small change in the environment for a specific case:
propagation of a 100 Hz tone over the “sand” seabed specified in Table 1. (This is an elastic
solid Pekeris2 model.) Fig. 1 shows the transmission loss between a source at depth 30 m and
a receiver at depth 60 m, at ranges between 20 km and 25 km. The reference curve (bold line)
is for a water depth of 100 m the other curve is for a water depth just 0.375 m less. In
principle, there are 6 trapped normal modes in this environment, but the interference pattern
suggests that only 3 are significant at this range. The change in water depth is small, and the
Table I: Environmental Parameters for a “Sand” Seabed
cp
αp
cw
cs
αs
H
ρ
[m] [m/s] [relative to water] [m/s] [dB/wavelength] [m/s] [dB/wavelength]
100 1500
1.9
1650
0.8
125
2.0
Transmission Loss [dB]
-69
-70
-71
-72
-73
-74
20
21
22
Range [km]
23
24
25
Figure 1: Acoustic transmission loss can be sensitive to small variations in environmental
parameters. In this case, a 100 Hz signal propagates over a sand bottom in water of depth
100 m (bold line) and 99.625 m (normal line). Identifiable peaks and nulls in the
interference pattern have shifted about 300 m closer to the source, as if the source has been
displaced.
ISBN 0-909882-19-3 © 2002 AAS
2
Acoustics 2002 - Innovation in Acoustics and Vibration
effect on the field is small, but noticeable. We will return to this example later, when we
consider “equivalent” alternate environments that mimic the same effect.
2 THE STOCHASTIC ENVIRONMENT
For simplicity, consider a shallow-water Pekeris environment in which the parameter values
are range-random variables having specified means and standard deviations with spatially
stationary statistics. We denote the set of parameters {τ i (r )}( i = 1,2,3,...) , which can be
ordered in any sensible way (water depth, sound speed in the water, compressional speed in
the bottom, seabed density, etc.). For now, we will not concern ourselves with the
complications of depth dependence. Each parameter is the sum of a mean component and a
zero-mean stochastic component, that is
τ i (r ) = τ i + ∆τ i (r ) = τ 0i + δτ i + ∆τ i (r ) ,
where τ i ≈
1
r
r
∫τ
0
i
(1a)
(r ′) dr ′ ,
(1b)
r
∫ ∆τ (r ′)dr ′ ≈ 0 ,
0
(1c)
i
and (following Kessel) the true mean value τ i is written as the sum of the model parameter
τ 0i and the mean parameter mismatch δτ i , which in ideal circumstances would be zero. (One
could say that the total parameter mismatch is δτ i + ∆τ i (r ) .)
In what follows, we will need the second-order statistics of the environmental parameters, that
is, the variance
σ i2 ≈
1
r
r
∫ [∆τ
0
i
(r ′)]2 dr ′
(2a)
and the correlation between parameters
C ij ≈
1
rσ i σ j
r
∫ ∆τ
0
i
(r ′)∆τ j (r ′)dr ′ ,
(2b)
so that C ij ≤ 1 . These statistics (mean, variance, correlation) would be difficult to measure in
practice, but could be estimated. Correlations of parameters would likely have some
XQGHUO\LQJ DQG SRVVLEO\ KLGGHQ SK\VLFDO IRXQGDWLRQ )RU H[DPSOH +DPLOWRQ¶V3 work
shows that compressional speed, shear speed, and density are all correlated through porosity
and other material properties.) It should also be mentioned that the correlations in this context
derive from the intrinsic spatial variability of the stochastic medium, and are distinct in
character from the statistical correlations of parameters deduced from inversion algorithms,
which only consider their combined influence on the long-range acoustic field.
ISBN 0-909882-19-3 © 2002 AAS
3
Acoustics 2002 - Innovation in Acoustics and Vibration
3 ADIABATIC MODE THEORY AND THE EFFECT OF RANDOM VARIABILITY
In an environment that is nearly range-independent with small variations in environmental
parameters, adiabatic mode theory4 is ideally suited to represent the acoustic pressure field:
p ( r , z ) = ∑ un (0, z s ) un ( r , z ) exp[iφn ( r )] / φn ( r ) .
(3)
n
The mode functions un ( r , z ) are weakly dependent on range, and are computed assuming a
range-independent model environment having parameters {τ 0i }. The adiabatic mode phase
function is:
r
φ n (r ) = ∫ k n (r ′)dr ′ ,
(4)
0
in which k n (r ) is the range-dependent local wavenumber associated with the mode function
un ( r, z ) . We are mostly concerned with the phase function, as small changes in wavenumber
can add up to generate significant phase differences in the mode sum.
Let us examine the effect of random variability on the mode phase. Expanding k n (r ) in a
Taylor series about the parameters {τ 0i }, we have
k n (r ) = k n + δτ i ∂ i k n + ∆τ i (r )∂ i k n + 12 ∆τ i (r )∆τ j (r )∂ ij2 k n +…,
in which ∂ i ≡
∂
∂2
and ∂ ij2 ≡
,
∂τ i ∂τ j
∂τ i
(5a)
(5b)
kn is the wavenumber computed with the model parameters {τ 0i }, and we are using the
Einstein summation convention (that is, repeated indices are summed). In (5a) we have
expanded to second-order terms, because the first-order effects of the random variations
{∆τ i (r )} vanish, as we shall see. We calculate the phase of the nth mode from (4) using (1b),
(1c), (2a), and (2b), to get
φ n (r ) = (k n + δτ i ∂ i k n + 12 C ij σ iσ j ∂ ij2 k n )r .
(6)
Kessel discussed the first two terms: the mode phase is the product of the range and an
effective wavenumber based on the model parameters plus a correction associated with the
mismatch between model and the true environment. The sensitivity to mean mismatch is
contained in the first derivatives ∂ i k n . The third term is interesting: in a spatially stationary
random environment, the effective wavenumber (in the adiabatic sense) has an additional
correction 12 Cijσ iσ j ∂ ij2 k n , a double sum of terms that combine the second derivatives of the
modes ( ∂ ij2 k n ) with the actual standard deviations of the environmental parameters ( σ i ),
including the effects of parameter correlation ( Cij ).
ISBN 0-909882-19-3 © 2002 AAS
4
Acoustics 2002 - Innovation in Acoustics and Vibration
4 SOME NUMERICAL EXAMPLES WITH DISCUSSION
Consider a typical case: the effect of propagation over a seabed of randomly-varying depth.
We choose the same environment used for Fig. 1. If all other parameters are assumed constant
and unbiased, then the only correction to the mode wavenumber kn is 12 σ H2 ∂ 2HH k n . In
principle, one could calculate the derivatives by finite difference calculations using the results
of a numerical normal mode code; however, for the Pekeris model, whose mode
wavenumbers are the roots of a characteristic equation that can be written in closed form, it is
possible to calculate such derivatives analytically and to evaluate them at the wavenumber
values determined through a root-finding algorithm. The derivatives are algebraically lengthy,
and are best derived using mathematical software capable of symbolic manipulation as well as
numerical analysis. We used Mathematica, Version 45, for our calculations. It is possible to
perform calculations with complex arithmetic, allowing the exact treatment of loss factors due
to attenuation and the generation of shear waves.
The coding of a transmission loss calculation based on the Pekeris model is straightforward,
and the same computer model is used for all figures in this paper. To estimate the field in the
random environment, we assume that the normal mode functions are those of the rangeindependent reference environment, but we calculate the complex phase function by
correcting the wavenumbers according to Eq. (6). This procedure follows the spirit of
adiabatic mode theory.
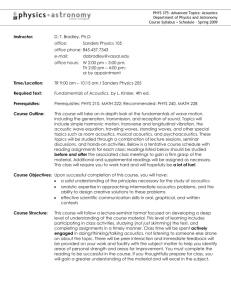
Fig. 2 shows the transmission loss assuming a random water layer of mean depth 100 m and
standard deviation 5 m. In this case, the results are remarkably similar to Fig. 1. In other
words, the effect of random variation in water depth is mimicked by changing the water depth
overall. One should not draw too many conclusions from a single result, but it does make a
point: random variations in the actual environment, if not accounted for, may bias the model
parameters derived through inverse modelling. Kessel has shown this rigorously for the case
Transmission Loss [dB]
-69
-70
-71
-72
-73
-74
20
21
22
Range [km]
23
24
25
Figure 2: Transmission loss over a sand seabed. Bold line: reference calculation.
Normal line: seabed as in reference calculation, but with a randomly thick water layer
of mean depth 100 m and standard deviation 5 m. Note similarity to Fig. 1.
ISBN 0-909882-19-3 © 2002 AAS
5
Acoustics 2002 - Innovation in Acoustics and Vibration
of parameter mismatch (i.e., getting the mean parameters wrong); Eq.(6) and Fig.(2) suggest
that much the same rigour could be applied to the case of random variations of parameters.
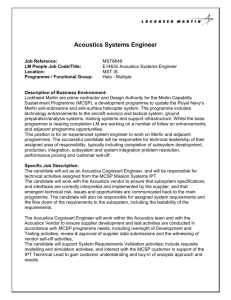
To elaborate, Fig. 3 shows another model result, in which the water depth is fixed at 100 m,
but both the compressional wave speed and the compressional wave attenuation have been
jointly increased: the compressional speed is 1665 m/s (vice 1650 m/s) and the corresponding
attenuation factor is 0.94 dB/wavelength (vice 0.8 dB/wavelength). Again, the results are
remarkably similar to both Figs. 1 and 2.
The ease with which altered parameters (increased cp and α p ) can be found to mimic the
effects of either overall shifts in other parameters (decreased H) or range-random variations in
other parameters (variable H) is perhaps a reflection of the relatively few numbers of modes
contributing to the field in this case. As already proposed by Chapman6 and Zhang and
Tindle7, there are whole families of effective seabed models (as far as the structure of waterborne acoustic field is concerned) in the case of deterministic environments. This simple
mode-phase analysis provides a means of demonstrating and quantifying how the
compensation of mismatch in many real parameters is accomplished by the relatively few,
effective, parameters in an acoustic model.
5 CONCLUSIONS AND FUTURE WORK
By applying adiabatic mode theory to the problem of randomly varying environmental
parameters in shallow water acoustics, we have found that the effect of such variations is to
slightly alter the mode wavenumbers to the extent that the multi-mode interference pattern in
the downrange acoustic field is corrupted. This transformation is in principle no different
from that introduced by parameter mismatch, leading to the hypothesis that environmental
variability, if unaccounted for, leads to biased estimates of parameters derived through inverse
modelling of the water-borne acoustic field.
The mathematical analysis succinctly encapsulates several important elements: (1) the
Transmission Loss [dB]
-69
-70
-71
-72
-73
-74
20
21
22
Range [km]
23
24
25
Figure 3: Transmission loss over a sand seabed. Bold line: reference calculation.
Normal line: seabed as in reference calculation, but with increased compressional
wave speed and attenuation. Note similarity to Figs. 1 and 2.
ISBN 0-909882-19-3 © 2002 AAS
6
Acoustics 2002 - Innovation in Acoustics and Vibration
sensitivity of the mode phase to systematic environmental mismatch is represented by the first
derivative of the mode wavenumber with respect to the parameters and to environmental
variability by the second derivative of the same; (2) the size of the wavenumber shift is in
proportion to the parameter mismatch or, in the case of variability, the parameter variance;
and (3) in principle, one needs to consider the role of spatial correlations between parameters
when investigating the effects of random variability.
The results of this investigation are admittedly incomplete, but the analysis has certainly
suggested several avenues to explore to deepen our appreciation and understanding of the
problem. In particular, we propose to validate the analytical results through a series of
controlled numerical experiments making use of a high-fidelity range-dependent forward
model to simulate acoustic fields propagating in stochastic environments. Matched-field
acoustic inversion of these simulated data with range-independent models will allow us to
gather statistics on parameter bias (and error) induced by unaccounted variability. Also, we
propose to extend Kessel’s concept of the environmental sensitivity matrix (which is based on
mean mismatch only) to include the effects of environmental variability. The inclusion of
both effects in the mathematical analysis should unite environmental uncertainty and
variability in a common framework.
ACKNOWLEDGEMENTS
The authors would like to thank Dave Thomson, Ross Chapman, Dale Ellis, and Liesa
Lapinski for helpful discussions and corroborative calculations.
REFERENCES
1. Kessel, Ronald T., “Range-dependent environmental mismatch in Matched-Field
Tomography,” Proceedings of the Joint Meeting of the 16th Int. Congress on Acoustics and
the 137th Meeting of the Acoustical Society of America, Seattle, WA, June 1998.
2 Jensen, Finn B., William A. Kuperman, Michael B. Porter, and Henrik Schmidt,
Computational Ocean Acoustics (AIP, New York, 1994), page 121.
3. Hamilton, E.L., “Geoacoustic modeling of the seafloor,” J. Acoust. Soc. Am. 68, 13131340 (1980).
4. Jensen et al., see Reference 2, page 320.
5. The Mathematica Book (Wolfram Research, Inc., Champaign, 1996), 3rd edition.
6. Chapman, David M.F., “What are we inverting for?,” Chapter 1 of Inverse Problems in
Underwater Acoustics, Michael I. Taroudakis and George Makrakis (editors), Springer Verlag, New York, 2001, pp. 1–14.
7. Zhang, Z.Y., and C.T. Tindle, “Complex effective depth of the ocean bottom,” J. Acoust.
Soc. Am. 93, 205-213, 1993.
ISBN 0-909882-19-3 © 2002 AAS
7