lyapunov exponents and stability for the stochastic duffing
advertisement

LYAPUNOV EXPONENTS AND
STABILITY FOR THE STOCHASTIC
DUFFING-VAN DER POL OSCILLATOR
Peter H. Baxendale
Department of Mathematics
University of Southern California
Los Angeles, CA 90089-1113
USA
baxendal@math.usc.edu
Abstract
Let λ denote the almost sure Lyapunov exponent obtained by linearizing
the stochastic Duffing-van der Pol oscillator
ẍ = −ω 2 x + β ẋ − Ax3 − Bx2 ẋ + σxẆt
at the origin x = ẋ = 0 in phase space. If λ > 0 then the process
{(xt , ẋt ) : t ≥ 0} is positive recurrent on R2 \ {(0, 0)} with stationary
probability measure µ, say. For λ > 0 let e
λ denote the almost sure
Lyapunov exponent obtained by linearizing the same equation along a
typical stationary trajectory in R2 \ {(0, 0)}. The sign of e
λ is important for stability properties of the two point motion associated with the
original equation. We use stochastic averaging techniques to estimate
the value of e
λ in the presence of small noise and small viscous damping.
Keywords: stochastic Duffing-van der Pol oscillator, stability, Lyapunov exponent,
stochastic averaging
1.
Introduction
The stochastic Duffing-van der Pol oscillator is currently the object of
much study in the theory of stability and bifurcations for stochastic dynamical systems. See for example Arnold [2], Arnold, Sri Namachchivaya
and Schenk-Hoppé [4], Keller and Ochs [13], and Schenk-Hoppé [18]. In
this paper we study the system with multiplicative white noise. To be
specific we consider the stochastic Duffing-van der Pol oscillator
ẍ = −ω 2 x + β ẋ − Ax3 − Bx2 ẋ + σxẆt
1
2
with ω > 0 and A ≥ 0 and B ≥ 0. Here −β is th coefficient of viscous
damping and σ is the intensity of the white noise forcing. To ensure that
the system is truly nonlinear we assume that at least one of A and B
is strictly positive; if B = 0 we assume also that β < 0 so as to obtain
some dissipation in the system.
Putting y = −ẋ/ω we get the 2-dimensional stochastic differential
equation
dxt
= −ωyt dt,
dyt
=
³
´
ωxt + βyt + (A/ω)x3t − Bx2t yt dt − (σ/ω)xt dWt .
(1)
Notice that the system has multiplicative noise and hence that (0, 0) is
a fixed point for (1). Linearizing at (0, 0) gives
·
dut =
0 −ω
ω β
¸
σ
ut dt −
ω
·
0 0
1 0
¸
ut dWt .
(2)
The (top) almost sure Lyapunov exponent λ = λ(β, σ, ω) for the system
(1) linearized at (0, 0) is defined as the almost sure limit
1
log kut k
(3)
t
where {ut : t ≥ 0} is a solution of (2). It is easy to show that the limit
exists almost surely and does not depend on u0 so long as u0 6= 0.
Clearly the sign of λ determines the almost sure stability or instability
of the linearized process {ut : t ≥ 0}. It also determines the behavior
near (0, 0) of the nonlinear process (xt , yt ). This in turn controls the
behavior of the process (xt , yt ) considered on the state space R2 \{(0, 0)}.
See Section 2 for details.
If λ > 0 then the solution {(xt , yt ) : t ≥ 0} of (1) is positive recurrent on R2 \ {(0, 0)} with a unique invariant probability measure
µ = µ(β, σ, ω, A, B), say. In this case we are interested in the question of stability along trajectories. Let (x0 , y0 ) and (x̃0 , ỹ0 ) be distinct initial points in R2 \ {(0, 0)}, and let {(xt , yt ) : t ≥ 0} and
{(x̃t , ỹt ) : t ≥ 0} be the corresponding solutions of (1) generated by
the same noise {Wt : t ≥ 0}. This produces a coupling of the trajectories {(xt , yt ) : t ≥ 0} and {(x̃t , ỹt ) : t ≥ 0}. We wish to consider
the behavior of k(x̃t , ỹt ) − (xt , yt )k as t → ∞. In this paper we shall
consider the distinct but closely related question of linearized stability
along trajectories.
Linearizing the system along a trajectory {(xt , yt ) : t ≥ 0} in R2 gives
λ(β, σ, ω) = lim
t→∞
"
dvt =
0
−ω
3A 2
ω + ω xt − 2Bxt yt β − Bx2t
#
·
vt dt −
0
σ
ω
0
0
¸
vt dWt .
(4)
3
Stochastic Duffing-van der Pol oscillator
In the same way that the process ut gives information about the behavior
of (xt , yt ) near (0, 0), we expect that the process vt will give information about the behavior of (x̃t , ỹt ) − (xt , yt ) when k(x̃t , ỹt ) − (xt , yt )k
is small. Thus we consider the stability of the solution vt of (4) when
(x0 , y0 ) 6= (0, 0). In particular we consider the (top) almost sure Lyae = λ(β,
e
punov exponent λ
σ, ω, A, B), say, for the system (1) linearized
along a stationary trajectory {(xt , yt ) : t ≥ 0} in R2 \ {0}, defined as the
almost sure limit
1
log kvt k.
t→∞ t
e
λ(β,
σ, ω, A, B) = lim
(5)
Notice that the almost sure limit is with respect to the product measure
P × µ where P represents the probability measure for {Wt : t ≥ 0} and
µ is the distribution of (x0 , y0 ) ∈ R2 \ {(0, 0)}. Recall that µ and thus
e exist only when λ > 0.
λ
An exact formula for λ(β, σ, ω) is given by Imkeller and Lederer [12];
earlier numerical calculations by Kozin and Prodromou [15] gave criteria
in terms of β, σ and ω for λ(β, σ, ω) to be positive or negative. However
e
the evaluation of λ(β,
σ, ω, A, B) is much more complicated, see Section
3, and to date there is no closed form formula.
In this paper we use stochastic averaging techniques to obtain estie in the case of small noise and small viscous damping. We
mates for λ
replace σ by εσ and β by ε2 β. A result of Auslender and Milstein [5]
gives
Ã
!
σ2
2
2 β
λ(ε β, εσ, ω) ∼ ε
+
2 8ω 2
e 2 β, εσ, ω, A, B) when β >
as ε → 0, so we look for estimates on λ(ε
2
2
−σ /4ω .
In Section 4 we consider the case when B = 0. In this case the system
can be regarded as a small perturbation of a Hamiltonian system, and
we have
e 2 β, εσ, ω, A, 0) ∼ ε2/3 λ
e0
λ(ε
e 0 > 0. This implies (linearized) instability along trajectories. In
where λ
Section 5 we consider the case when A > 0 and B > 0. Now we have
e 2 β, εσ, ω, A, 0) ∼ ε2 λ
e ave
λ(ε
e 1 is the top Lyapunov exponent along trajectories for a stochaswhere λ
e ave is given
tically averaged version of the original system. The value of λ
e
by a two dimensional integral formula. The sign of λave depends only
on the dimensionless quantities βω 2 /σ 2 > −1/4 and ωB/A. Numerical
4
simulations presented in Section 5.1 show that for −σ 2 /4ω 2 < β < 0
e ave is positive if ωB/A ≤ 1 and is negative if
the Lyapunov exponent λ
ωB/A ≥ 1.5.
2.
Behavior near 0
The following result makes precise the idea that the behavior of the
linearization ut at (0, 0) determines the behavior of (xt , yt ) near (0, 0).
It is essentially an application of Theorems 2.12 and 2.13 of Baxendale
[7], see also Theorem 2.8 of Baxendale [8]. The verification of condition
(2.3) for [7] (or condition H1(z) of [8]) is carried out in [8] for the case
B = 0, β < 0, and in [9] for the case B > 0.
Theorem 1 For the system (1)
(i) If λ < 0 then
1
log k(xt , yt )k ≤ λ
t→∞ t
almost surely, for all (x0 , y0 ) 6= 0.
lim sup
(ii) If λ > 0 there exists a unique probability measure µ on R2 \ {(0, 0)}
such that
Z
Z
1 t
lim
φ(xs , ys ) ds = φ dµ
t→∞ t 0
almost surely, for all bounded measurable φ : R2 \ {(0, 0)} → R
and all (x0 , y0 ) 6= (0, 0). In particular µ is the unique invariant
measure for {(xt , yt ) : t ≥ 0} on R2 \ {(0, 0)}.
Notice that if λ > 0 then the linearized process ut → ∞ almost surely,
whereas the original process (xt , yt ) is affected by the cubic nonlinearity
and does not tend to infinity.
3.
Khasminskii-Carverhill formula
In this section we assume that λ > 0, so that the invariant probability
measure µ on R2 \ {(0, 0)} exists. We apply the method developed by
Khasminskii [14] for linear stochastic differential equations and extended
to the nonlinear
setting
by Carverhill [11]. For vt given by (4) write
¸
·
cos θt
. Then
vt = kvt k
sin θt
µ
dθt =
3A 2
x − 2Bxt yt ) cos2 θt + (β − Bx2t ) sin θt cos θt
ω t
!
σ2
σ
3
− 2 sin θt cos θt dt − cos2 θt dWt .
(6)
ω
ω
ω+(
5
Stochastic Duffing-van der Pol oscillator
Moreover, Itô’s formula for log kvt k and the ergodic theorem give
e = lim 1 log kvt k =
λ
t→∞
t
Z
(R2 \{0})×S1
Q(x, y, θ) dν(x, y, θ)
(7)
where
µ
¶
3A 2
x − 2Bxy sin θ cos θ + (β − Bx2 ) sin2 θ
ω
σ2
+ 2 cos 2θ cos2 θ
2ω
Q(x, y, θ) =
and ν is the invariant probability measure for the diffusion process
{(xt , yt , θt ) : t ≥ 0} on (R2 \ {(0, 0)}) × S1 given by (1) and (6). The
existence of ν is implied by the existence of its marginal µ, which in turn
is guaranteed by λ > 0. The uniqueness of ν can be verified using the
methods of Arnold and San Martin [3].
The formula for λ is obtained similarly, using just the original setting of Khasminskii. Putting x = y = 0 reduces the three dimensional
problem in (7) to the one dimensional problem handled by [12] and [15].
4.
The Duffing case B = 0, β < 0
In this section we consider the system
dxt
dyt
= −ωy
µ t dt
A
ωxt + ε βyt + x3t
ω
2
=
¶
dt −
εσ
xt dWt
ω
which may be regarded as a small perturbation of the Hamiltonian system with
´
ω³ 2
A 4
H(x, y) =
x .
x + y2 +
2
4ω
Theorem 2 (Baxendale and Goukasian [10]) If −σ 2 /4ω 2 < β < 0
then
e 2 β, εσ, ω, A, 0) = ε2/3 λ
e 0 + O(ε4/3 )
λ(ε
as ε → 0
e0 = λ
e 0 (β, σ, ω) > 0.
where λ
There are three main ideas in the proof. The first one is to write
the equation for vt in the moving frame given by the vectors ∇⊥ H(x, y)
and ∇H(x, y)/k∇H(x, y)k2 (where ∇⊥ H(x, y) denotes the symplectic
gradient of H). The resulting equation has the form
·
dvt =
0 J(xt , yt )
0
0
¸
vt dt + ε2 M0 (xt , yt )vt dt + εM1 (xt , yt )vt dWt (8)
6
where J(x, y) is a scalar function and M0 (x, y) and M1 (x, y) are matrixvalued functions.
The second main idea is to use a technique due to Pinsky and Wihstutz
[17] for small perturbations of nilpotent linear systems. Their method
shows that the constant coefficient linear stochastic differential equation
·
dvt =
0 a
0 0
¸
·
vt dt + ε2
a11 a12
a21 a22
¸
·
vt dt + ε
b11 b12
b21 b22
¸
vt dWt (9)
has Lyapunov exponent
λ(ε) = ε2/3 γ0 |a|2/3 |b21 |2/3 + O(ε4/3 )
as ε → 0
so long as a 6= 0 and b21 6= 0, where
π
γ0 = 1/3 1/6 1 2 ≈ 0.29.
2 3 [Γ( 3 )]
The exact value of γ0 is due to Ariaratnam and Xie [1].
The third main idea is to use stochastic averaging techniques to pass
from the variable coefficient equation (8) to the constant coefficient equation (9). The stochastic averaging involves three different time scales, so
e reduces to a
that the original three dimensional integral formula for λ
e
one dimensional integral formula for λ0 which involves a strictly positive
integrand.
5.
The case A > 0, B > 0
Following Arnold, Sri Namachchivaya & Schenk-Hoppé [4] we rescale
spatially x → x/ε, y → y/ε to obtain
dxt
= −ωyt dt
dyt
= ωxt dt + ε2 βyt +
¶
µ
εσ
A 3
xt − Bx2t yt dt −
xt dWt .
ω
ω
This system is a small perturbation
of the rigid rotation
·
¸·
¸with constant
cos ωt sin ωt
xt
angular velocity ω. Write zt =
, then
− sin ωt cos ωt
yt
dzt = ε2 F (z, t)dt + εG(z, t)dWt
(10)
where the vector fields F (z, ·) and G(z, ·) have period 2π/ω. Applying
the method of stochastic averaging to the k-point motion of this SDE
(rescale time by factor 1/ε2 and take weak limit), we get
Ã
dzt =
!
3A
β Bkzt k2
−
zt dt −
kzt k2 Jzt dt
2
8
8ω
´
√
σ ³
+ √
K1 zt dWt1 + K2 zt dWt2 + 2Jzt dWt3
2 2ω
(11)
7
Stochastic Duffing-van der Pol oscillator
where
·
J=
0 1
−1 0
¸
·
,
K1 =
1 0
0 −1
¸
·
,
K2 =
0 1
1 0
¸
.
It is important to observe that the stochastic averaging done in the
passage from (10) to (11) is carried out at the level of the k-point motions, for all k ≥ 1. Related results are contained in Section 5.6 of
Kunita [16]. If the stochastic averaging is done only for the one point
motion of (10) the resulting information is only the generator for the
one point motion of (11). There are many ways of choosing a stochastic
differential equation (SDE) with a given generator for the one point motion, and these different choices of SDE can have many different stability
behaviors, and many different values for the Lyapunov exponent along
trajectories, see Baxendale [6]. However by doing stochastic averaging
for the k-point motions, we gain information about the local characteristics of the stochastic flow associated with (11). In particular the law
of the stochastic flow associated with (11) is uniquely determined.
In this setting Arnold, Sri Namachchivaya and Schenk-Hoppé [4] choose
the simpler SDE
Ã
dzt =
!
β Bkzt k2
3A
−
zt dt −
kzt k2 Jzt dt
2
8
8ω
´
√
σ ³
+ √
zt dWt1 + 3Jzt dWt2
2 2ω
(12)
which generates the same one-point motion as (11). This SDE has λ =
e = 0 (when λ > 0). Moreover the (one-point)
β/2 + σ 2 /8ω 2 and λ
amplitude process rt = kzt k given by (11) or (12) satisfies an SDE of the
form
Ã
!
βrt Brt3 3σ 2 rt
σ
drt =
−
+
dt + √ rt dWt
(13)
2
8
16ω 2
2 2ω
e = −2λ (when λ > 0). Thus equations
which has λ = β/2+σ 2 /8ω 2 and λ
(11), (12) and (13) give three different values for the Lyapunov exponent
along trajectories. The following theorem tells us that (11) is the correct
SDE to study.
Theorem 3 (Baxendale [9]) Assume A > 0, B > 0. Let λave and
e ave be the Lyapunov exponents for the averaged SDE (11). Then as
λ
ε → 0,
Ã
!
σ2
2
2
2 β
λ(ε β, εσ, ω) ∼ ε λave = ε
+
(14)
2 8ω 2
8
and if β > −4σ 2 /ω 2 then
e 2 β, εσ, ω, A, B) ∼ ε2 λ
e ave .
λ(ε
(15)
In fact the first result (14) is due to Auslender and Milstein [5]; the
explicit formula for λave comes from the rotational symmetry of (11).
The result (15) is plausible because the Lyapunov exponent is not affected by spatial rescaling and rigid rotations. However since stochastic
averaging guarantees only convergence on finite intervals of time there
is work to be done. The proof of (15) uses the Khasminskii-Carverhill
formula (7) and the weak convergence of the invariant measures ν on
(R2 \ {0}) × S1 as ε → 0. It is here that the condition B > 0 is used.
If B = 0 then the sequence of invariant measures is not tight and the
estimate (15) fails, see Section 4. The condition A > 0 ensures that the
limit measure is unique. It will also ensure that the measure νe in (16)
is unique.
e ave . The rotational
It remains to calculate the Lyapunov exponent λ
symmetry in (11) reduces the calculation in the Khasminskii-Carverhill
formula to a two-dimensional problem. We have
2
e ave = − β − σ +
λ
2 8ω 2
Z Ã
!
3Ar2
Br2
sin 2ψ −
cos 2ψ dνe(r, ψ)
8ω
8
(16)
where νe is the invariant probability on (0, ∞) × S1 for
Ã
drt =
and
βrt Brt3 3σ 2 rt
−
+
2
8
16ω 2
Ã
dψt =
!
σ
dt + √ rt dBt1
2 2ω
!
B 2
3Art2
rt sin 2ψt +
cos2 ψt dt
8
4ω
σ
σ
− √ sin 2ψt dBt1 + √ (−1 + cos 2ψt ) dBt2 .
2 2ω
2 2ω
The processes rt and ψt are related to the processes·(xt , y¸t ) and·θt used in¸
xt
cos φt
the derivation of the formula (7) by the formulas
= rt
yt
sin φt
e
and ψt = θt − φt . Moreover, the dependence of λave on the parameters
β, σ, ω, A and B satisfies
e ave (β, σ, ω, A, B) =
λ
σ2 e
ω2β
ωB
λ
(
, 1, 1, 1,
).
ave
2
2
ω
σ
A
9
Stochastic Duffing-van der Pol oscillator
e ave depends only on the dimensionless quanWe see that the sign of λ
2
2
tities ω β/σ and ωB/A. The first quantity measures the strength of
the viscous damping relative to the noise intensity. The second quantity measures the relative sizes of the cubic dissipation Bx2 ẋ and cubic
restoring force Ax3 .
5.1
e
Numerical calculations for λ
ave
Write st = rt−2 , then st satisfies the affine equation
µ
B
dst = −βst +
4
¶
σ
dt − √ st dBt1
2ω
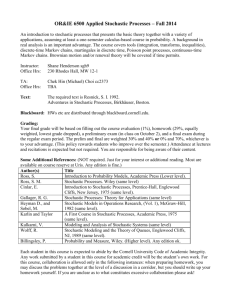
The following numerical results used a first order Euler scheme to simulate the process (st , ψt ) on some time interval [0, T ], and this was used
to approximate the integral in (16) by the corresponding discrete time
average. See Talay [19] for a theoretical discussion of this method. The
simulations all had ω = σ = 1 and T ≈ 7.8 × 105 . The value of β was
increased from -0.245 to 0.005 in steps of 0.005. In Figures 1 and 2 the
dotted line shows the exact value λave = β/2 + 1/8. The solid lines show
e ave with time step h = 0.001. The dashed
the results of simulation of λ
e ave with time step h = 0.0005.
line shows the results of simulation of λ
e
Figure 1 shows λave for the values ωB/A = 0.5, 1, 1.5, 2 and 3. Figure
e ave for the values ωB/A = 1, 1.24 and 1.5.
2 shows λ
From the numerical data in Figure 1 we see in the range −σ 2 /4ω 2 <
β < 0 we have
e ave > 0
λ
e ave < 0
λ
)
(
if
ωB/A ≤ 1
ωB/A ≥ 1.5
Finally consider the numerical data in Figure 2 for ωB/A = 1.24.
e ave which are of the same order as
Here we are dealing with values of λ
the time step h, and hence of the same order as the possible error in the
e ave , see [19]. However, Figure 2 shows that halving
computed value of λ
the time step, from 0.001 to 0.0005, has little effect on the data. Thus it
e ave will be
is reasonable to believe that the graph of the true value of λ
close to a smoothed out version of the solid (or dashed) line. Therefore
our calculations strongly suggest that when ωB/A = 1.24 the averaged
system (11) experiences two dynamic bifurcations as β is increased from
−∞ to 0. One occurs when β = −σ 2 /4ω 2 as the fixed point (0,0) loses
stability, but the system still has stability along trajectories. The other
occurs at approximately β = −0.17σ 2 /ω 2 , as the property of stability
along trajectories is lost.
10
0.1
0.5
0.08
0.06
0.04
1
0.02
0
1.5
−0.02
2
−0.04
−0.06
3
−0.08
−0.1
−0.25
−0.2
−0.15
−0.1
−0.05
0
Figure 1.
Lyapunov exponent as a function of β when σ 2 /ω 2 = 1. Dotted line:
λ = β/2 + 1/8. Solid lines: e
λ for ωB/A = 0.5, 1, 1.5, 2 and 3.
−3
5
x 10
1
4
3
2
1.24
1
0
−1
−2
−3
−4
1.5
−5
−0.25
−0.2
−0.15
−0.1
−0.05
0
Figure 2.
Lyapunov exponent as a function of β when σ 2 /ω 2 = 1. Dotted line:
λave = β/2 + 1/8. Solid lines: e
λave for ωB/A = 1, 1.24 and 1.5 with h = 0.001.
Dashed line: e
λave for ωB/A = 1.24 with h = 0.0005.
Acknowledgments
I would like to thank Levon Goukasian (University of Southern California) for his assistance with the numerical computations in Section
5.1.
Stochastic Duffing-van der Pol oscillator
11
References
[1] S.T. Ariaratnam and W.C. Xie (1990). Lyapunov exponent and rotation number
of a two-dimensional nilpotent stochastic system. Dynam. Stability Systems. 5
1–9.
[2] L. Arnold (1998). Random dynamical systems. Springer, Berlin Heidelberg New
York.
[3] L. Arnold and L. San Martin (1986). A control problem related to the Lyapunov
spectrum of stochastic flows. Matemática Aplicada e Computacional 5 31–64.
[4] L. Arnold, N. Sri Namachchivaya and K. Schenk-Hoppé (1996). Toward an understanding of the stochastic Hopf bifurcation: a case study. Internat. J. Bifur.
Chaos 6 1947–1975.
[5] E. Auslender and G. Mil’shtein (1982). Asymptotic expansions of the Liapunov
index for linear stochastic systems with small noise. J. Appl. Math. Mech. 46
277–283.
[6] P. Baxendale (1986). Asymptotic behaviour of stochastic flows of diffeomorphisms. In Stochastic processes and their applications. Proc. Nagoya 1985. (K.
Itô and T. Hida, eds) Lect. Notes Math. 1203 1–19. Springer, Berlin Heidelberg
New York.
[7] P. Baxendale (1991). Invariant measures for nonlinear stochastic differential equations. In: Lyapunov Exponents. Proc. Oberwolfach 1990. (L. Arnold, H. Crauel
and J.-P. Eckmann, eds) Lect. Notes Math. 1486 123–140. Springer, Berlin Heidelberg New York.
[8] P. Baxendale (1994). A stochastic Hopf bifurcation. Probab. Th. Rel. Fields 99
581–616.
[9] P. Baxendale (2002). Stochastic averaging and asymptotic behavior of the
stochastic Duffing - van der Pol equation. Preprint.
[10] P. Baxendale and L. Goukasian (2002). Lyapunov exponents for small random
perturbations of Hamiltonian systems. Ann. Probab. 30 101–134.
[11] A. Carverhill (1985). A formula for the Lyapunov numbers of a stochastic flow.
Application to a perturbation theorem. Stochastics 14 209–226.
[12] P. Imkeller and C. Lederer (1999). An explicit description of the Lyapunov exponents of the noisy damped harmonic oscillator. Dynam. Stability Systems 14
385–405.
[13] H. Keller and G. Ochs (1999). Numerical approximation of random attractors.
In: Stochastic dynamics (H Crauel, M. Gundlach, eds) 93–115. Springer, Berlin
Heidelberg New York.
[14] R. Khasminskii (1967). Necessary and sufficient conditions for the asymptotic
stability of linear stochastic systems. Theory Probab. Appl. 12 144–147.
[15] F. Kozin and S. Prodromou (1971). Necessary and sufficient conditions for almost
sure sample stability of linear Itô equations. SIAM J. Appl. Math. 21 413–424.
[16] H. Kunita (1990). Stochastic flows and stochastic differential equations. Cambridge University Press.
[17] M. Pinsky and V. Wihstutz (1988). Lyapunov exponents of nilpotent Itô systems.
Stochastics 25 43–57.
12
[18] K. Schenk-Hoppé (1996). Bifurcation scenarios of the noisy Duffing-van der Pol
oscillator. Nonlinear dynamics 11 255–274.
[19] D. Talay (1999). The Lyapunov exponent for the Euler scheme for stochastic
differential equations. In: Stochastic dynamics (H Crauel, M. Gundlach, eds) 241–
258. Springer, Berlin Heidelberg New York.