Introduction to Thermal Circuits for Steady-State, One
advertisement

Opti 521 Fall ‘08, Tutorial Project
Last Saved on 2/15/2016 3:09:00 PM
B. Anderton
Pg. 1 of 10
Introduction to Thermal Circuits for Steady-State, One-Dimensional Heat Transfer
Abstract
Assuming steady-state, one-dimensional heat transfer via conduction and/or
convection modes, expressions are derived for thermal resistances across planar
and cylindrical interfaces. Series and parallel thermal network models are
discussed (emphasizing similarity to electrical circuit theory). Two example
applications are given, one further illustrating similarities to electrical circuit
analysis techniques, and one illustrating the competing effects of conduction and
convection in minimizing heat transferred to a refrigerant in an insulated pipe.
Various extensions to general thermal network theory are briefly surveyed.
Introduction
Thermal conduction and convection are often phenomenologically introduced in firstsemester optomechanical courses. Respective expressions governing the relation
between heat flux, in W/ m 2 , to either a linear material’s temperature gradient
(conduction) or the difference in surface and ambient temperature (convection), are
typically applied to as many as two layers and rarely considered for more composite
systems (multi-layered and involving both conduction and convection).
At the same time, a typical prerequisite for understanding optomechanical system
performance is exposure to system modeling. Often, this has been introduced in the form
of network theory for direct current electrical circuits. Such provides a well established
analytical framework for determining currents and voltages in respective loops and nodes
using the appropriate Kirchoff law. Rarely would one limit the consideration of electrical
circuits to only one or two resistor networks. Instead, complex systems are shown to be
reducible to Norton/Thevenin equivalent circuits, which capture overall system
performance in as little as one or two parameters. A key building block of this
framework is Ohm’s law, providing the basis of the electrical resistance concept.
Similarities between these two different mechanisms (heat transfer and charge transfer)
suggests that a similar network model could also apply to thermal networks. These
thermal networks would then be subject to the same principles of network theory as are
electrical circuits, with the appropriate modification of what each variable represents (e.g.
current as either charge flow or heat flow). Kirchoff’s laws for summing voltages about a
loop or currents at a point would then equally apply to thermal circuits.
The goals of this paper are as follows:
lay the foundation for thermal network theory (for special cases of conduction and
convection modes across planar and cylindrical walls),
derive appropriate expressions for thermal resistance,
describe the conditions for which series and parallel thermal models are
appropriate,
work through two typical examples of thermal network problems, and
survey extensions of thermal network theory beyond the principles/applications
covered here.
B. Anderton
Opti 521 Fall ‘08, Tutorial Project
Last Saved on 2/15/2016 3:09:00 PM
Pg. 2 of 10
Fundamental Heat Transfer Principles
Before deriving thermal resistance expressions, some fundamental principles of heat
transfer will be briefly presented. It is assumed the reader has a qualitative understanding
of conduction and convection heat transfer modes. In-depth explanations of physical
mechanisms by which these modes occur, as well as the validity limits of transfer
expressions, are given in [1], chapter 1.
Pertinent heat transfer modes: The primary forms of heat transfer are conduction,
convection, and radiation. Within the scope of this paper, only conduction and
convection are considered.
Fourier’s law of conduction relates heat rate q (in Watts) within a linear medium of
conduction coefficient , cross-sectional area A,and temperature distribution T r , to
the temperature gradient as follows:
q A T
(1)
Newton’s law of cooling relating one-dimensional convective heat flow (along arbitrary
linear dimension x) q x from a surface to the difference between surface and ambient fluid
temperatures ( Ts and T , respectively) through a proportionality constant h, as follows:
qx h A Ts T
(2)
Note that h depends on a variety of parameters governing a specific flow condition (fluid
density, viscosity, speed, turbulence, etc.). The subscript on T indicates its reference to
fluid temperature at distances far from near-surface boundary-layer temperature
variations. Note that each of these laws may be expressed as heat flux, q q / A .
Heat diffusion equation: The heat diffusion equation governs the time and spatial
transfer of heat in a system. This “continuity equation” relates a medium’s heat
generation Egen q , net (inward) power transfer Ein Eout 2T , and net stored
energy rate of change Estored c p
T
(with density and specific heat c p ) at a point
t
according to:
2T q c p
T
t
(3)
Equation (3) can be understood in terms of an energy balance at an infinitesimal control
volume: Ein Eout Egen Estored .
B. Anderton
Opti 521 Fall ‘08, Tutorial Project
Last Saved on 2/15/2016 3:09:00 PM
Pg. 3 of 10
Simplifying Assumptions and Coordinate Setups
This section modifies the general form of (3) for specific flow conditions and geometries,
producing spatial temperature distributions and heat rates.
Steady-state, source-free conditions: Neglecting temporal temperature changes (and thus
assuming temperature at each location in the media of interest does not vary with time),
we set T / t 0 in equation (3). We furthermore restrict attention to media without
time-dependent heat sources (or sinks) and thus set q 0 . With these two restrictions,
the heat diffusion equation reduces to:
2T 0
(4)
Now consider solutions to (4) for two specific coordinate setups.
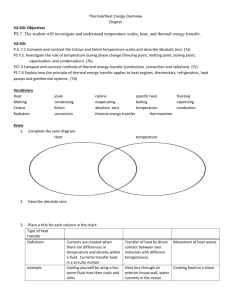
1D heat transfer through planar wall: Assuming the Cartesian geometry of a planar wall
(Fig. 1-A) in which the primary direction of heat flow occurs parallel to the x coordinate
axis, we reduce the Laplacian of equation (4) to:
d 2T
0
dx 2
(5)
Assuming this wall has boundary conditions T x 0 Ts ,1 and T x L Ts ,2 , we
directly integrate equation (5) to produce a spatial temperature distribution according to
T x
Ts ,2 Ts ,1
L
x Ts ,1 .
(6)
This temperature distribution induces the following conductive heat flow:
qx A
dT
dx
A
L
T
s ,1
Ts ,2 .
(7)
Opti 521 Fall ‘08, Tutorial Project
Last Saved on 2/15/2016 3:09:00 PM
B. Anderton
Medium: crosssectional area A
Temperature T
Pg. 4 of 10
Temperature T
qx
Ts ,1
r2
r1
Ts ,1
Ts ,2
Ts ,2
L
Distance r
Distance x
Medium: length L
(into the page)
Figure 1: System geometries: (A) planar wall (left), (B) cylindrical wall
1D heat transfer through cylindrical wall: Assuming the cylindrical geometry of Fig. 1B (where only radial heat transfer occurs across the medium), equation (4)’s Laplacian
takes the form
d dT
r
0.
r dr dr
(8)
Directly integrating this expression subject to boundary conditions T r r1 Ts ,1 and
T r r2 Ts ,2 yields the following spatial temperature profile:
T r
Ts ,1 Ts ,2
r
ln Ts ,2
ln r1 / r2 r2
(9)
This temperature variation gives rise to conductive heat flow via Fourier’s law:
qr A
2 L Ts ,1 Ts ,2
dT
.
dr
ln r2 / r1
(10)
Note that the radial-location-dependent cross-sectional area in this previous expression is
given by A 2 rL .
B. Anderton
Opti 521 Fall ‘08, Tutorial Project
Last Saved on 2/15/2016 3:09:00 PM
Pg. 5 of 10
Expressions for Resistances
Recall from circuit theory that resistance Relec across an element is defined as the ratio of
electric potential difference V across that element, to electric current I traveling
through that element, according to Ohm’s law,
Relec
V
.
I
(11)
Within the context of heat transfer, the respective analogues of electric potential and
current are temperature difference T and heat rate q, respectively. Thus we can
establish “thermal circuits” if we similarly establish thermal resistances R according to
R
T
.
q
(12)
We now consider specific expressions for R based on results for the two geometries
specified in the previous section.
Planar wall conductive resistance: Again referring to Fig. 1-A and the result in equation
(7), we see that thermal resistance may be obtained according to
Rx,cond
Ts ,1 Ts ,2
qx
L
.
A
(13)
Cylindrical wall conductive resistance: Referring to Fig. 1-B and equation (10), we
obtain conductive resistance through a cylindrical wall according to
Rr ,cond
Ts ,1 Ts ,2
qr
ln r2 / r1
2 L
.
(14)
Convective resistance: The form of Newton’s law of cooling, in equation (2), lends itself
to a direct form of convective resistance, valid for either geometry.
Rconv
Ts T
1
q
hA
(15)
Series and Parallel Thermal Networks
With expressions for calculating thermal resistances in hand, we move on to the
important task of choosing appropriate models for thermal networks. The utility of
thermal resistances exists in the ease with which otherwise complicated thermal systems
are modeled. This section considers series and parallel thermal networks, drawing
Opti 521 Fall ‘08, Tutorial Project
Last Saved on 2/15/2016 3:09:00 PM
B. Anderton
Pg. 6 of 10
analogies to circuit theory’s rules for
equivalent resistance. For simplicity, only
Cartesian geometries are considered.
Series networks: Recall from circuit theory
that resistors in series produce an equivalent
resistance between input-output terminals
that is the sum of individual resistances,
owing to the fact that each individual resistor
has the same current flowing through it.
Rseries,eq i Ri
(16)
Likewise, systems in which multiple
elements are intercepted by a single heat
flowline are modeled serially.
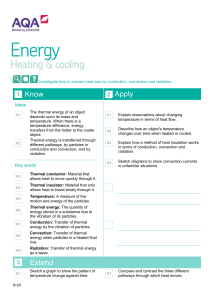
Fig. 2
illustrates an example series model and
Figure 2: Layered planar wall (from [1])
circuit schematic for a double-exposed,
layered window (note the presence of both
conduction and convection transfer modes). In this example, the equivalent thermal
resistance would be the sum of each resistance shown, and would relate overall
temperature difference across the network according to
Req
T1, T4,
qx
1 1 LA LB LC 1
.
A h1 A B C h2
(17)
Parallel networks: Recall that electrical resistors
in parallel produce equivalent resistance
R| |,eq 1 i Ri1 .
(18)
Such a model exists when multiple current paths
exist between two nodes. A similar situation
occurs in thermal networks when two paths
(through different media) exist between two points
of the same temperature. An example system is
shown in Fig. 3, with two equivalent schematics.
The equivalent resistance between the left and
right faces of material F (or G) is thus
1
Req
1
LG
LF
G A / 2
F A / 2
1
(19)
Note that this equivalent resistance will be less
than either individual component.
Figure 3: Parallel conduction network (from [1])
Opti 521 Fall ‘08, Tutorial Project
Last Saved on 2/15/2016 3:09:00 PM
B. Anderton
Pg. 7 of 10
Note that this circuit model is valid only when heat flow is assumed approximately onedimensional (if significant heat flow occurred vertically between materials F and G, the
resistors-in-parallel model would be invalidated).
Example Problems
This section applies thermal resistance principles in the analysis of two example
problems, one for each geometry of interest. The first example will extend our modeling
capabilities by adding a current source to a flux-based network with specified surface
contact resistance to model an epoxy bond. The second example demonstrates
performance tradeoffs involved with scaling geometrical form factors in search of
optimum performance. These examples introduce other concepts not mentioned
previously and demonstrate the analogous relationship between thermal and electrical
circuit analysis.
Example 1: Comparing performance to specification (max temperature):
Problem statement:
o A thin silicon chip and an 8-mm-thick aluminum substrate are separated
by a 0.02-mm-thick epoxy joint (whose thermal resistance can be
2
approximated as a contact resistance of Rt ,c R t ,c / A 0.9 104 mWK )
o The chip and substrate have their exposed surfaces cooled by 25 C air,
providing a convection coefficient of 100 mW2 K .
o If the chip dissipates 104
W
m2
under normal conditions, will it operate
below a maximum allowable temperature of 85 C ?
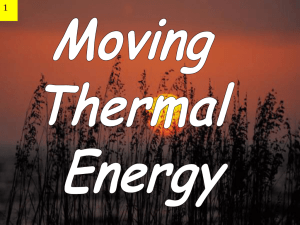
System diagram/schematic: See Fig.
4 at the right. Note that currents are
shown in terms of fluxes (in mW2 ),
denoted
with
double-primes
( q q / A ) since areas are not
specified. This requires resistances
to be stated in terms of Ri Ri A .
Note
particularly
how
the
4
2
chip dissipation is
10 W/ m
modeled as a flux source.
Analysis:
o We seek to find whether the
Figure 4: Problem 1 diagram/schematic (from [1])
calculated value of Tc
remains below the 85 C specification.
o We start by noting, just as in electrical circuits, that the total current
entering the Tc node must equal the current leaving it:
B. Anderton
Opti 521 Fall ‘08, Tutorial Project
Last Saved on 2/15/2016 3:09:00 PM
qc q1 q2
Pg. 8 of 10
Tc T
Tc T
1/ h
Rt ,c L / Al 1/ h
(20)
1
1
o Solving for Tc yields Tc T qc h
.
Rt ,c L / Al 1/ h
o Substituting all known values (with
Al 239 mWK )
Tc 25 C 104
W
m 2 K
100 0.9
1
4
0.33 100 10
gives
1
m 2 K
W
25 C 50.3 C 75.3 C
o Therefore, the chip will operate below the maximum allowable
temperature.
The next example considers the following two competing effects in a cylindrical
insulation system as the outer insulation radius r increases:
ln r / ri
The increase in conduction resistance Rr,cond Rr ,cond L
2
1
Rconv L
The decrease in convection resistance Rconv
(due to a larger
2 r h
exposed outer area).
Example 2: Scaling effects on system geometry
Problem statement:
o A thin-walled copper tube of radius ri is used to
transport a low-temperature refrigerant and is at a
temperature Ti that is less than that of the ambient air
at T around the tube. Is there an optimum thickness
associated with application of insulation to the tube?
System diagram/schematic: See Fig. 5 at right. Note that
per-unit-length currents q q / L and resistances R R L
are used and that the system is modeled as a serial, radial
system.
Analysis:
o Note that the optimum value of r will minimize Figure 5: Problem 2 diagram/schematic
(from [1])
current q delivered from the environment to the
, the optimum r will
refrigerant (or equivalently, since q T Ti / Rtot
between the environment and refrigerant).
maximize resistance Rtot
o Note that total resistance is calculated as Rtot
thus a function of outer radius r.
ln r / ri
2
1
and is
2 r h
Opti 521 Fall ‘08, Tutorial Project
Last Saved on 2/15/2016 3:09:00 PM
B. Anderton
o We
find
extrema
of
Pg. 9 of 10
r
Rtot
by
calculating
d
1 1
1
r
Rtot
2 0 . This extremum occurs at r / h .
dr
2 r r h
depending
o This r / h extremum produces {minimum, maximum} Rtot
/ dr 2
on whether d 2 Rtot
o We find
r / h
is {positive, negative}.
d 2 Rtot
1
1
and
3
2
2
dr
2 r r h
d 2 Rtot
2
dr
r / h
h2
2 3
which is
always positive, and hence the extremum r / h effectively minimizes
(thus maximizing the current q to our refrigerant, the opposite of the
Rtot
desired effect).
r , we conclude that an
o Since r / h was the only extremum of Rtot
optimum thickness does not exist.
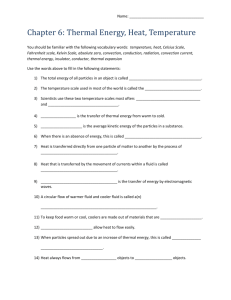
An example plot of Rtot , with contributions
from conductive and convective components,
is shown in Fig. 6, evaluated for values
, and
ri 5mm , h 5 mW
0.055 mWK
2
K
(producing
a
critical
radius
that
rcr / k 0.011m such
Note that, beyond the
rcr ri 0.006 m ).
critical radius, the performance increases with
increasing insulation radius.
Extensions not covered here
Figure 6: Effect of total resistance for
increased insulation thickness (from [1])
This discussion has limited scope to concepts/applications most likely to be of immediate
interest to the audience. A more generalized treatment of thermal network theory is
found in [1], chapter 3. Some extensions of this theory beyond the concepts covered in
this paper include:
1 1
1
.
4 rinner router
Incorporation of heat generation ( q ) effects in a circuit.
Radiative heat transfer, occurring according to the Stefan-Boltzmann law
4
Ts4 Tsurr
qrad
, can be expressed as qrad hr A Ts Tsurr where radiation
Thermal resistance of a spherical shell: Rcond
2
heat transfer coefficient hr Ts Tsurr Ts 2 Tsurr
has strong temperature
dependence. For such cases, thermal resistance may be defined similarly to the
Opti 521 Fall ‘08, Tutorial Project
Last Saved on 2/15/2016 3:09:00 PM
B. Anderton
Pg. 10 of 10
1
. This usually exists in parallel with the convective
hr A
resistance at a surface (when radiative effects are not negligible).
Heat transfer from extended surfaces (cooling fins, etc. where the 1D flow
assumption is invalid) often have tabulated expressions for temperature
T x T
distribution
and heat transfer rate qfin based on geometry and fin
b Tbase T
boundary conditions. Such a table (for fins of uniform cross section) is given in
Table 3.4 of [1]. A figure-of-merit often used for fin geometry performance
convective mode: Rrad
comparison is the fin thermal resistance, Rfin
b
qfin
(a higher Rfin value indicates
poorer cooling performance).
Under certain conditions, cylindrical and/or spherical geometries with large radii
can be approximated as planar (flat) walls.
Summary
The concepts of conductive and convective thermal resistance were derived from
fundamental laws governing heat transfer and the heat diffusion equation. Two specific
geometries (planar and cylindrical walls) were considered in obtaining explicit forms for
conductive resistances. Thermal network modeling was then covered, emphasizing the
conditions appropriate for serial and parallel networks. Two examples were then used to
reinforce the developed concepts, one drawing further similarity between the analyses of
thermal and electrical networks, and one considering the tradeoffs in conductive and
convective heat losses as geometry changed. Extensions were briefly surveyed.
In conclusion, we have successfully outlined the process of setting up and analyzing
steady-state, 1D heat transfer problems for the geometries and modes indicated. The
analytical capabilities provided in this discussion are deemed worthy tools for the system
engineer, as system sensitivities (such as change in interface temperature for incremental
changes in thicknesses, etc.) and overall system performance (whether a tradeoff in
thermal performance balances the risk of other factors, such as mechanical stiffness) can
now be achieved by recycling the analytical framework used in linear circuit theory.
Reference
[1]
F. P. Incropera, D. P. DeWitt, T. L. Bergmann, A. S. Lavine, Fundamentals of
Heat and Mass Transfer, 6th Ed., John Wiley & Sons Inc., 2006.