Trash Collector Proposal
advertisement

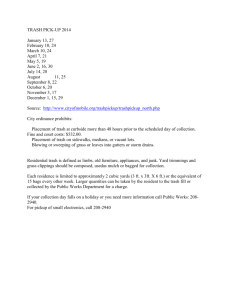
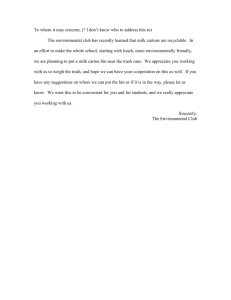
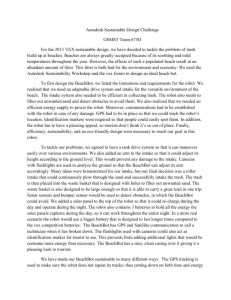
Trash-Collector A. Activity Synopsis A Lego Mindstorms robot will act as a trash-collector, maneuvering around a raised tabletop. The robot will stay on the tabletop, and will find, pickup, and throw away pieces of “trash” scattered across the table. Actions Performed The robot will: not fall off the tabletop locate pieces of “trash” on the tabletop, one piece at a time pick up a piece of trash when it is identified carry the piece of trash to a drop-off location drop the piece of trash in the drop-off bin search for another piece of trash, repeat process Activity Breakdown This activity could be split into multiple modules to fit a multi-day activity, as shown below. These processes could be combined to create a 2-day, 3-day, or 4-day activity. Day 1 Build basic robot with light sensor Program robot to operate on table without falling off and to follow a line to the drop-off location Test line-following and ability to remain on tabletop Day 2 Add touch sensor and grabber claws to robot Add pick-up, carry, and drop functions to program, using touch sensor Test pick-up, carry, and drop functions by placing objects in the path of the robot Day 3 Add ultrasonic sensor to robot Add search function and motor rotation storage and recall for detected objects to program Test ultrasonic detection of objects and accuracy of travel to the closest object Day 4 Test complete program with all functions Allow time to fix/modify robot and program Compete against other teams on accuracy of activity and robot’s ability to perform activity without human interference B. Required Resources Sensors and Props In addition to the basic Lego robotic vehicle, each group of students will use: (1) light sensor to detect the edge of the tabletop and follow a path to the trash bin (1) ultrasonic sensor to detect whether a piece of “trash” is in front of it (1) touch sensor to register when it has picked up a piece of “trash” (1) large bucket to drop the “trash” pieces into (can use the buckets that the Legos come in) Multiple pieces of “trash” (can use the balls that come in the Lego kits, or wads of paper) Tabletop, marked with a pathway Setup To set up this activity, there should be: Only one robot running in the room at a time, so multiple ultrasonic frequency waves don't interfere with performance A flat tabletop, raised off the floor to allow for accurate edge sensor readings A pathway, marked on the tabletop (or on a piece of paper covering the table) in black tape or marker, leading from multiple points on the table to the drop-off position, as shown below A bucket, placed on a chair or another table, positioned below the edge of the tabletop at the drop-off location, as shown below Figure 1: Sample Tabletop Design with Bucket C. Activity Benefits Can reduce activity design time by modifying the can-collector instructions Can reduce robot design time by modifying the GrabBot robot design provided in the Lego Mindstorms NXT One-Kit Wonders book or the TriBot robot design provided in the Lego Mindstorms NXT kit Can reduce robot construction time and difficulty during the activity by using the GrabBot or TriBot construction instructions provided in the books Students learn systematically how to use multiple sensors in their design Figure 2: TriBot robot Figure 3: GrabBot robot D. Possible Challenges Might be difficult to get robot to recognize “trash” pieces that are soft (wads of paper) or round (balls included with Lego kit); may need to find/make larger objects (cans or cubes of Legos) Using multiple ultrasonic sensors together in one room during the activity will cause interference and decreased accuracy in “trash” location Current can-collector design does not find cans well, probably due to sensor location; will require slight redesign GrabBot design is not set up to follow a line; will require more significant redesign TriBot design is not scheduled to easily allow for the activity breakdown listed above; will require slight redesign All code provided for GrabBot and TriBot robots is in drag-and-drop form and will need to be translated into NXC E. Alternative Options Have robot sort “trash” in addition to collecting it: ◦ Use colored cups or colored cubes made of Legos as “trash” ◦ Use two collection buckets, one for each type of “trash” ◦ Use (1) color sensor to determine type of “trash” and which bin to drop “trash” into ▪ Mark colored squares on the tabletop so the robot can scan them and determine which path to take to reach the correct collection bin, or program robot to take a particular path based on the color of the “trash” it’s holding ▪ Have the collection robot drop the “trash” into a generic bin, then use another robot to scan the “trash” and move it to the correct bin (requires an additional color sensor) Use funnel-type collection where material slides into funnel and is dragged in cache by robot Use funnel-type collection onto a conveyor, to move “trash” into a bin on the robot F. Additional Resources Previously-Implemented Examples: This type of activity has been done previously. Links to examples of this activity are below. Kelly, et al., (2009), Lego's Mindstorms NXT One-Kit Wonders, No Starch Press, Inc., San Francisco, CA, pg 303. Lego Mindstorms, (2009), “Meet the Robots: TriBot”, The Lego Group, [www.mindstorms.lego.com/Overview/MTR_TriBot.aspx], accessed June 24, 2009. http://www.youtube.com/watch?v=RqKV-q4OGbU http://www.youtube.com/watch?v=UjDWcjOMqUg&feature=related http://www.youtube.com/watch?v=FXiWFEAQoZ4 http://www.youtube.com/watch?v=iIXTO9T0gp4 http://www.youtube.com/watch?v=mqMEkHnQ260&feature=related