A Neural Network on GPU
advertisement

http://www.codeproject.com/KB/library/NeuralNetRec
ognition.aspx
Introduction
An Artificial Neural Network is an information processing method that was inspired
by the way biological nervous systems function, such as the brain, to process
information. It is composed of a large number of highly interconnected processing
elements (neurons) working in unison to solve specific problems. Neural Networks
have been widely used in "analogous" signal classifications, including handwriting,
voice and image recognitions. Neural network can also be used in computer games.
It enables games with the ability to adaptively learn from player behaviors. This
technique has been used in racing games, such that opponent cars controlled by
computers can learn how to drive by human players.
Since a Neural Network requires a considerable number of vector and matrix
operations to get results, it is very suitable to be implemented in a parallel
programming model and run on Graphics Processing Units (GPUs). Our goal is to
utilize and unleash the power of GPUs to boost the performance of a Neural Network
solving handwriting recognition problems.
This project was originally our graphics architecture course project. We ran on GPU
the same Neural Network described by Mike O'Neill in his brilliant article "Neural
Network for Recognition of Handwritten Digits".
About the Neural Network
A Neural Network consists of two basic kinds of elements, neurons and connections.
Neurons connect with each other through connections to form a network. This is a
simplified theory model of the human brain.
A Neural Network often has multiple layers; neurons of a certain layer connect
neurons of the next level in some way. Every connection between them is assigned
with a weight value. At the beginning, input data are fed into the neurons of the first
layer, and by computing the weighted sum of all connected first layer neurons, we
can get the neuron value of a second layer neuron and so on. Finally, we can reach
the last layer, which is the output. All the computations involved in operating a
Neural Network are a bunch of dot products.
The secret of a Neural Network is all about weight values. Right values make it
perfect. However, at the beginning, we don't know those values. Therefore, we need
to train our network with sample inputs and compare the outcomes with our desired
answers. Some algorithm can take the errors as inputs and modify the network
weights. If patient enough, the Neural Network can be trained to achieve high
accuracy.
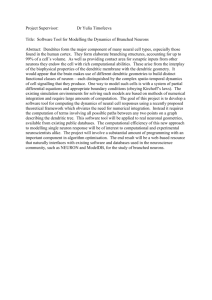
The neural network we implemented was a 5 layer network called convolutional
neural network. This kind of network is proven to be suitable for recognizing
handwritten digits. For more theoretical details, please check out Mike's article and
the references he has listed.
The first three layers of our neural network consist of several feature maps. Each of
them is shrunken from the previous layer. Our input is a 29*29 image of a digit.
Therefore, we have 29*29=841 neurons in the first layer. The second layer is a
convolutional layer with 6 feature maps. Each feature map which is a 13*13 image
is sampled from the first layer. Each pixel/neuron in a feature map is a 5*5
convolutional kernel of the input layer. So, there are 13*13*6 = 1014
nodes/neurons in this layer, and (5*5+1(bias node))*6 = 156 weights,
1014*(5*5+1) = 26364 connections linking to the first layer.
Layer 3 is also a convolutional layer, but with 50 smaller feature maps. Each feature
map is 5*5 in size, and each pixel in these feature maps is a 5*5 convolutional
kernel of corresponding areas of all 6 feature maps of the previous layer. There are
thus 5*5*50 = 1250 neurons in this layer, (5*5+1)*6*50 = 7800 weights, and
1250*26 = 32500 connections.
The fourth layer is a fully-connected layer with 100 neurons. Since it is
fully-connected, each of the 100 neurons in the layer is connected to all 1250
neurons in the previous layer. There are therefore 100 neurons in it, 100*(1250+1)
= 125100 weights and 100x1251 = 125100 connections.
Layer 5 is the final output layer. This layer is also a fully-connected layer with 10
units. Each of the 10 neurons in this layer is connected to all 100 neurons of the
previous layer. There are 10 neurons in Layer 5, 10*(100+1) = 1010 weights and
10x101 = 1010 connections.
As you can see, although structurally simple, this Neural Network is a huge data
structure.
Previous GPU Implementation
Fast Neural Network Library (FANN) has a very simple implementation of Neural
Network on GPU with GLSL. Each neural is represented by a single color channel of
a texture pixel. This network is very specific; neurons are ranging from 0 to 1 and
have an accuracy of only 8 bits. This implementation takes the advantage of
hardware accelerated dot product function to calculate neurons. Both neurons and
weights are carried on texture maps.
This implementation is straightforward and easy, however limited. First, in our
neural network, we require 32-bit float accuracy for each neuron. Since our network
has five layers, accuracy lost at the first level could be accumulated and alter the
final results. And because it is important that a handwriting recognition system
should be sensitive enough to detect slight differences between different inputs,
using only 8 bits to represent a neuron is unacceptable. Secondly, normal Neural
Networks map neuron values to the range from 0 to 1. However, in our program, the
Neural Network which is specifically designed for handwriting recognition has a
special activation function mapping each neuron value to the range from -1 to 1.
Therefore, if the neuron is represented by a single color value as in FANN library, our
neurons will lose accuracy further. Finally, the FANN method uses a dot product to
compute neurons, which is suitable for full connected Neural Networks. In our
implementation, the Neural Network is partially connected. Computations
performed on our Neural Network involve dot products of large vectors.
Our Implementation
Due to all the inconvenience about GLSL mentioned above, we finally choose CUDA.
The reason that the Neural Network is suitable for GPU is that the training and
execution of a Neural Network are two separate processes. Once properly trained,
no writing access is required while using a Neural Network. Therefore there is no
synchronization issue that needs to be addressed. Moreover, neurons on a same
network level are completely isolated, such that neuron value computations can
achieve highly parallelization.
In our code, weights for the first layer are stored as an array, and those inputs are
copied to device. For each network level, there is a CUDA function handling the
computation of neuron values of that level, since parallelism can only be achieved
within one level and the connections are different between levels. The connections
of the Neural Network are implicitly defined in CUDA functions with the equations of
next level neuron computation. No explicit connection data structure exists in our
code. This is one main difference between our code and the CPU version by Mike.
For example, each neuron value of the second level is a weighted sum of 25 neurons
of the first level and one bias. The second neuron level is composed of 6 feature
maps; each has a size of 13*13. We assign a blockID for each feature map and a
threadID for each neuron on a feature map. Every feature map is handled by a
block and each pixel on it is dealt with by a thread.
This is the CUDA function that computes the second network layer:
Collapse
Copy Code
__global__ void executeFirstLayer
(float *Layer1_Neurons_GPU,float *Layer1_Weights_GPU,float
*Layer2_Neurons_GPU)
{
int blockID=blockIdx.x;
int pixelX=threadIdx.x;
int pixelY=threadIdx.y;
int kernelTemplate[25] = {
0, 1,
2,
3,
4,
29, 30, 31, 32, 33,
58, 59, 60, 61, 62,
87, 88, 89, 90, 91,
116,117,118,119,120 };
int weightBegin=blockID*26;
int windowX=pixelX*2;
int windowY=pixelY*2;
float result=0;
result+=Layer1_Weights_GPU[weightBegin];
++weightBegin;
for(int i=0;i<25;++i)
{
result+=Layer1_Neurons_GPU
[windowY*29+windowX+kernelTemplate[i]]*Layer1_Weights_GPU[weightBegin+i];
}
result=(1.7159*tanhf(0.66666667*result));
Layer2_Neurons_GPU[13*13*blockID+pixelY*13+pixelX]=result;
}
All other levels are computed the same way; the only difference is the equation of
calculating neurons.
The main program first transfers all the input data to GPU and then calls each CUDA
function in order and finally gets the answer.
The user interface is a separate program using C#. Users can draw a digit with the
mouse on the input pad, the program then generates a 29*29 image and calls the
kernel Neural Network program. The kernel, as described above, will read the input
image and feed it into our Neural Network. Results are also returned with files and
then read back by the user interface.
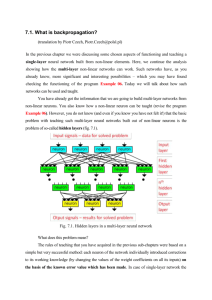
Here is a screenshot. After drawing a digit, we can get all the 10 neuron values of
the last network layer. The index of the maximum neuron value is the most possible
digit. We shade candidates with different depth of red colors according to their
possibilities.
On the right, the user interface will print out feature maps of the first three layers.
Note that C# under Windows XP has a resolution issue. We tested our program
under 120dpi. A 96dpi resolution setting could shift the input image around, so that
the accuracy is badly affected.
No training part is included in our GPU implementation. We use Mike’s code to train
all the weights and cached them with files.
Result
Accuracy
Our Neural Network can achieve a 95% accuracy. The database we used to train the
network is called MNIST containing 60000 handwriting examples from different
people. It is reported by Dr. LeCun that this network can converge after around 25
times of training. This number is confirmed by our test. We achieved only around
1400 miss-recognition samples out of 60000 inputs.
Also note that there is a bug in Mike's code. This is the corrected code for initializing
the second layer:
Collapse
Copy Code
for ( fm=0; fm<50; ++fm)
{
for ( ii=0; ii<5; ++ii )
{
for ( jj=0; jj<5; ++jj )
{
// iNumWeight = fm * 26; // 26 is the number of weights per feature map
iNumWeight = fm * 156; // 156 is the number of weights per feature map
NNNeuron& n = *( pLayer->m_Neurons[ jj + ii*5 + fm*25 ] );
n.AddConnection( ULONG_MAX, iNumWeight++ ); // bias weight
for ( kk=0; kk<25; ++kk )
{
// note: max val of index == 1013, corresponding to 1014 neurons in prev
layer
n.AddConnection(
2*jj + 26*ii + kernelTemplate2[kk], iNumWeight++ );
n.AddConnection( 169 + 2*jj + 26*ii + kernelTemplate2[kk], iNumWeight++ );
n.AddConnection( 338 + 2*jj + 26*ii + kernelTemplate2[kk], iNumWeight++ );
n.AddConnection( 507 + 2*jj + 26*ii + kernelTemplate2[kk], iNumWeight++ );
n.AddConnection( 676 + 2*jj + 26*ii + kernelTemplate2[kk], iNumWeight++ );
n.AddConnection( 845 + 2*jj + 26*ii + kernelTemplate2[kk], iNumWeight++ );
}
}
}
}
Please refer to this for the details about this bug.
Our GPU implementation is based on the correct version, however there isn't too
much difference in terms of accuracy.
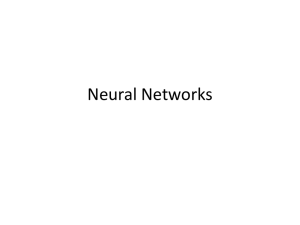
Performance
The major reason for using GPU to compute Neural Network is to achieve robustness.
The outcome is promising compared to CPU implementation. As shown in the table
above, the executing time of GPU version, EmuRelease version and CPU version
running on one single input sample is compared. The GPU version speeds up by 270
times compared to CPU version and 516.6 times compared to EmuRelease version.
To be more accurate, we also considered the IO time consumption of the GPU
version. As we can see, even when the IO time is considered, our method is 10 times
faster. And in practical use, weight values need only be loaded into the device once.