Recognition of plans at tactical level in threat assessment
advertisement

A Generic Model of Tactical Plan Recognition for Threat
Assessment
Robert Suzić
Tel: +46 (0) 8 55 50 32 17
Swedish Defence Research Agency (FOI)
SE-172 90 Stockholm
Sweden
Email: robert.suzic@foi.se ; rsu@nada.kth.se
ABSTRACT
Plan recognition has to be performed in a statistically robust manner concerning a possibly infinite number of tactical
situations and different types of units. We need a generic model for tactical plan recognition where we combine
observations and a priori knowledge in a flexible manner by using suitable methodologies and by having a large
hypothesis space taken into account. Threat and therefore observed agent’s plans should be put into a context.
Here, we propose Multi-Entity Bayesian Networks (MEBN), introduced in [2], which enable the composition of
Bayesian Networks from the network pieces, as the key methodology when designing flexible plan recognition models.
However, Bayesian network pieces (fragments) must be compatible and therefore we propose ontology for generic plan
recognition using Bayesian network fragments. Additionally, we claim that by using multi-entity network fragments we
expand the hypothesis space and using this approach various multi-agents structures can be expressed. Our final
contribution is that we incorporate the use of explicit utilities in our plan recognition model.
1. INTRODUCTION
1.1 Background
We see plan recognition as the automatic process of reasoning about an agent’s current and future actions or set of
actions, see also [15, 16]. This reasoning process involves observations, a priori knowledge about agents, and
information about their interrelations and current guesses about actions/plans utilities. In this paper we propose a generic
framework for tactical plan recognition using multi-entity Bayesian networks (MEBN), [2].
1.2 Motivation
Tactical plan recognition deals with incomplete knowledge, stochastic outcomes of actions and uncertain observations.
In military applications, the use of plan recognition could be extremely valuable when utilizing sensor data and of
decisive importance in achieving information superiority. Sensors simply are not able to see what is occurring in
opponents’ head(s). Military commanders have to act agilely and they do not have plenty of time (especially on tactical
level) to interpret data. In some cases the difficulty to recognize different patterns is caused by space - time separation,
and limited capability to correlate patterns. In some cases behavior of single agents can be classified as harmless, but put
in some greater context such as agents’ mutual interrelations, environment and their assumed doctrines the threat might
be identified as much higher.
We claim that representing and recognizing a certain type of agent or recognition of one of its behavior patterns may not
be sufficient to recognize intentions. Instead we need more; firstly, we have to recognize both spatial and temporal
patterns; in the plan recognition models we are connecting those patterns to plan alternatives in a flexible manner;
secondly, modeling incomplete doctrine, knowledge about (hostile) agent(s) as for example behavior in different terrain
types and in which manner different patterns are related to certain plan alternatives; and finally, to estimate which agents
alternatives are rationally more probable by using explicit utilities. The multi-agent tactical plan recognition issue has to
take different decision (abstraction) levels into account. This is very complex and difficult. Therefore we need a generic
model for tactical plan recognition where we combine observations and a priori knowledge in a flexible manner by using
suitable methodologies and by having a large hypothesis space taken into account.
Furthermore, we cannot say that an agent poses a threat in absolute terms. Threat and therefore observed agent’s plans
should be put into a context. The same agent may pose low threat to one strategic position or to some of our units but at
same time be very dangerous to some other own (force) units. Additionally, different situations imply use of different
plan recognition models or pieces of models that are composed depending on certain factor(s). Consequently, on-line
flexibility for plan recognition models is required.
1.3 Previous approaches
We note that plan recognition has to be performed in a statistically robust manner. Bayesian networks, [17, 18], (BN)
and Dynamic Bayesian Networks, [19], (DBN) have been used for plan recognition. That kind of approach is generalized
by [1] introducing a model (framework) for plan recognition and is designated as Abstract Memory Hidden Markov
Model (AHMEM). We find AHMEM as first step and a solid base when designing our framework for a generic model of
plan recognition. World observations can be more complex than position estimate and be more suitable to be represented
on different abstraction levels. Consequently, in this paper we extend AHMEM model by adding utility nodes and
instead of state nodes at bottom level we add state nodes at each abstraction level. By adding a representation of
aggregated states we allow higher level evidence to enter the plan recognition framework. Moreover, we propose reuse
of Bayesian network fragments. This concept is described as Multi-Entity Bayesian Networks (MEBN) and is presented
in [2]. It fits our generic framework in a flexible manner with respect to context. However, network fragments must be
compatible and therefore we propose ontology for generic plan recognition using Bayesian network fragments.
Additionally, we claim that by using multi-entity network fragments we expand the hypothesis space and using this
approach various multi-agents structures can be expressed. Our final contribution is that we incorporate the use of
explicit utilities in our model.
1.4 Aim and Structure
This is a concept paper where we introduce a flexible and generic model for tactical plan recognition. In Section 2, we
introduce Fuzzy membership functions that are supposed to supply MEBN with contextual evidence. Here we also
discuss reasons for using BN. We see MEBN, i.e. fragmented BN, as the key methodology when designing flexible plan
recognition models. In Section 3, we explain how the reuse of BN fragments for plan recognition can be supported by
using ontology for MEBN. This concept is exemplified in Section 4. A Generic model of tactical plan recognition for
threat assessment, represented in form of aggregated nodes, is described in Section 5. Finally, in Section 6, we discuss
our contributions and future work.
2. METHODOLOGY
Soft computing is a type of calculation that is “tolerant” to incompleteness, uncertainty and approximation. We see our
generic model for plan recognition as a soft computing method that combines Bayesian statistics and fuzzy membership
functions. The latter has the task to connect observation data to a Bayesian network by entering context relevant
evidence.
Plan recognition can be viewed as a classification problem. Therefore techniques such as neural networks could be
applied. However, the use of symbolic methods is preferred where we can use abstract representation of intentions.
Moreover, (fortunately) wars do not occur very often and the subjective knowledge becomes a more informative source
than historical data, making symbolic representation more suitable.
Here, we propose use of Bayesian Networks (BN) as the basis for plan recognition reasoning (inference). There are
several reasons to use BN. One of them is that they represent uncertainty in a structured and piecewise manner. By
representing knowledge with BN we can define joint probability distributions. The second reason is that BN provides a
transparent knowledge representation model. This implies that we are able to modify a part of the BN, changing the
direction or changing the prior distribution, without being forced to change all nodes. Finally, the BN provides a
qualitative knowledge representation.
2.1 Multi-Entity Bayesian Networks (MEBN)
The problem of how to handle complexity arises when we want to describe behavior [3, 4, 5] of many military units
instead of one military unit. The BN becomes very large with many state variables. When we model, a clear conception
of how the system works is required. As the number of variables grows, the difficulty of envisioning such a model
increases enormously [6]. Therefore a process of classification and describing relations between classes in a flexible
manner is required.
The concept of Multi-Entity Bayesian networks (MEBN) is described in [2]. MEBN is based on separate graphical
models. Those models are reusable pieces that during the process of situation-specific BN construction produce a
sequence of BNs contextual variables. MEBN has the ability to absorb new facts about the world, incorporate them into
existing theories, and/or modify theories in light of evidence. MEBN fragments, network entities, specify local
dependencies among a collection of related hypotheses. Consequently, they specify joint probability distributions over
unbounded and possibly infinite number of hypotheses. These properties lead us to propose MEBN as the key
methodology when designing flexible plan recognition models.
2.2 Fuzzy Membership Functions
We see fuzzy membership functions as a tool to translate sensor data to evidence for Bayesian nodes. An attribute’s
value is described in fuzzy set theory as its degree of belonging to a certain class. The parameter space in fuzzy set
theory is vague which enables context based representation, see [7]. Fuzzy membership functions have turned out to be a
useful method to transform sensor data to classes based on incomplete, empirical knowledge, see [7]. Corresponding
classes are represented as states in BN nodes.
When modeling a priori knowledge it is hard to describe all aspects of knowledge properties. Doctrine knowledge is
usually described in textual form. Linguistic impreciseness provides the elasticity to conserve a family of models capable
of capturing the essence of the problem. However, representation of imprecise knowledge in a computer understandable
manner may turn out to be a difficult process. “Most tactically-significant events require a more robust and flexible
means of expression. This can be achieved by the use of fuzzy logic”, [7]. To represent (empirical) a priori knowledge
that is imprecise we use a family of fuzzy membership functions. Translation of context independent (sensor) data to
context dependent data (information) with respect to knowledge incompleteness is the main advantage of fuzzy
membership functions, for our purpose.
An attribute property’s degree of belonging to a certain class is an example. If we are precise, we express in “crisp”
terms that an attribute’s property either belongs to a certain class or not. In fuzzy logic we are imprecise and can express
even to which degree an attribute has its property, i.e. belongs to a certain class. Functions that express such degree are
called fuzzy membership functions. E.g. a person either is tall or not in “crisp” logic but in fuzzy set theory it can belong
to the class tall to certain degree. More advanced representations of fuzzy membership functions deal with problems
where an attribute has more than one related property that depends on each other. Such fuzzy functions are designated as
family of fuzzy membership functions, i.e. an attribute property can belong in various degrees to related classes at the
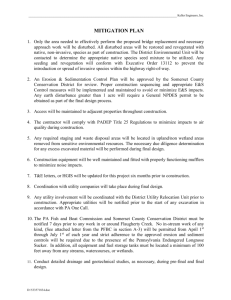
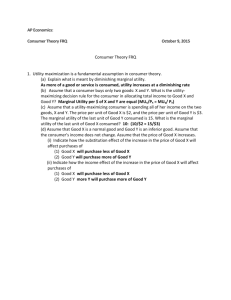
same time. E.g. an attribute called “tank platoon’s formation type” can belong to classes: “marching formation”,
“stepped formation” and “battle line formation” depending on formation angle.
Tank platoon’s
formation type’s
family of fuzzy
membership
functions
Formation Angle
Figure 1 Family of fuzzy membership functions for different types of formations
To the left in figure 1, we see a fuzzy function of formation type “marching formation”. In the middle we see fuzzy
function of “stepped formation” and on the right we see fuzzy function of “battle line formation”. Formation angle
relative to its moving direction is calculated by using observations of tank positions. For each angle we obtain a
distribution of membership degrees of belonging to a certain formation. This distribution is entered into the Bayesian
node Formation and is interpreted as a subjective probability distribution of states, i.e. each state corresponds to a fuzzy
membership function.
In general, fuzzy membership functions can be used for recognition of patterns and quantifications of attribute properties
that are in the next step used for plan recognition in MEBN.
3. ONTOLOGY FOR TACTICAL PLAN RECOGNITION USING MEBN
The common operational picture (COP) represents the situation in an area of interest. COP (often) contains agent
aggregates, i.e. tactical groups of agents. In military applications, flexible decision hierarchies appear and therefore
aggregate structures can vary. On the other hand, there are some restrictions on aggregates’ diversity of structures, such
as different military hierarchies. We assume that we are able to model restrictions regarding which level is superior to
which. Additionally, bearing in the mind the widely spread idea of network centric organizations, such (aggregate)
structure must be possible to express in a flexible manner. Therefore we define representation of decision levels in a
relative manner by defining the rule superior to in terms of sets, not in terms of ordering levels. E.g. a decision level
company is superior to group and platoon levels and at the same time subordinated to battalion level. This implies that
directly subordinated to company can be both units such groups and platoons. To the battalion level all three types
company, platoon and group can be directly subordinated. In such manner we keep both flexibility in representing
various aspects of decision models and at the same time preserve some parts of hierarchical decision structure.
A MEBN can be (connected) constructed automatically by set of rules based on COP. We propose to match one or more
network fragments to a certain type of aggregate (unit). A set of predefined rules could be used to match MEBN to
aggregation models. Here we use a superior to relation to represent different decision levels in MEBN where we
designate decision levels as abstraction levels.
However, a human user, who could be a military commander or an analyst, should be able to add or remove some
network entities provided its knowledge of the situation. In such an interactive manner we make use both of the
automatic process of data fusion aggregation and of human capabilities. I.e. the human user can complement the
translation process of aggregation/COP to MEBN. The consequence is additional/enriched and more accurate plan
recognition components.
Following a definition of an agent as a process, unit or phenomenon that perceives its environment by using its sensors
and acting using its effectors we assume that agent’s actions/plans are influenced by interaction with the environment, its
own capacities, goals and utility functions.
Ontology stands for a specific perspective, or an assumption, about the target application area to be represented. The
reason ontologies are becoming so popular has to do in large part with what they promise: a shared and common
understanding of some domain that can be communicated among people and application systems [20].
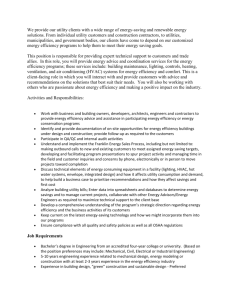
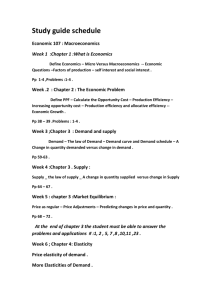
We use a representation of ontology types in form of boxes and aggregation nodes, see Figure 3 and 2. By aggregation
nodes we mean Bayesian nodes that may contain Bayesian networks, network entities, or just simple nodes. The
conceptual division of MEBN fragments for generic tactical plan recognition is divided into main classes: observations (O),
state (S), plan (P) and utility (U). This conceptual division is made for each abstraction/decision level n.
Un
Pn
Sn
On
Figure 2 Conceptual division for generic tactical plan recognition
In Figure 2, a plan node (Pn) represents our belief about what a certain agent on decision level n is doing. We want to
answer by plan recognition the question what an agent or group of agents is doing. The hypothesis space is spanned by a
priori knowledge about the agent. Given a certain plan alternative, knowledge about what we are expected to see, i.e.
which states we are expected to, observe is encoded. That is the reason why we say that plans or certain behaviors cause
state change. E.g. it is possible to represent support, knowledge, for the hypothesis “agent is angry” if this agent is
screaming and throwing things around, i.e. causes change of state. A tactical military example could be that plan
alternative “attack” causes certain (generic) changes in state such as regrouping into certain patterns. An agent’s plan
eventually results in some utility (Un), see left part of Figure 2. A natural, rational, assumption is that an agent wants to
maximize its utility, i.e. maximizes its gain and minimizes its expected loss.
In BNs we use conditional probabilities. Our a priory knowledge, on the right, is the knowledge what is the most
probable state given plan alternatives P(State|Plans). For our tactical plan recognition purpose here we use
knowledge about temporal, spatial and pattern properties. Doctrine manuals, terrain properties, weather conditions,
formations, and expected time to impact are nodes supposed to be represented in MEBN and are classfied as State and
State-Plan a priori knowledge.
In utility theory terms, where an agent is maximizing its utility, State-Plan a priori knowledge deals with utility in a
implicit manner, i.e. the prior is the likelihood that an agent will expand its plan in a particular manner. Moreover,
execution of plans has consequences. An additional approach is to take an agent’s preferences explicitly into
consideration, see related work [8, 9]. Utility functions that support our generic plan recognition are called explicit utility
functions. They enter evidence into utility nodes, Utility of Plan Alternative, whose states are {High, Low}. A plan
alternative that maximizes expected explicit utility would be the most probable one. However, we are not certain if our
explicit functions reflect the agent’s real utility function(s). Additionally, we are not certain if the agent will maximize its
utility in all situations. Therefore we model a priori knowledge of utility given plans, P(Utility|Plans), i.e. the explicit
utility distribution of alternative states given a plan alternative. E.g. we model the prior that, given knowledge that an
agent is attacking the probability distribution of states, Utility of Attack; naturally, the prior is informative if Utility of
Attack’s state High in the node is greater than 50 %.
An already existing model, considering utility, is to take capabilities between opponents into account. An example in
previous work [3] is the use of Force Balance node with states {Stronger, Weaker}; it is a greater probability that
an agent will attack if it is stronger than if it is weaker. Expected losses and how much an agent would gain by executing
certain plans is a trade-off that can be modeled. Given a plan option we calculate expected utility concerning both
opponents and own forces capabilities, costs and losses.
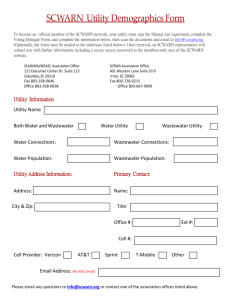
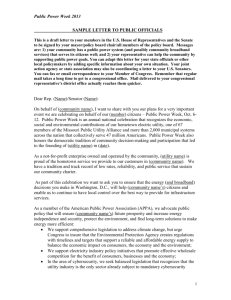
:State (attr1, attr2, ..)
:Temporal
:Spatial
Data
Data
:Pattern data
:Plans (attr1, attr2, ..)
:Plan Space
{P1,..Pi,.Pm}
: Abstractaction level
:Utility (attr1, attr2, ..)
: Plan Alt.
Pi
: Exp.
utility f:ons
Figure 3 MEBN ontology for tactical plan recognition
As shown in Figure 3 state, plans and utilities we denote more detailed ontology of types of aggregated nodes (network
fragments), in form of boxes, that are supposed to support our generic plan recognition model. It is intended that each
part, like e.g. temporal data, can consist of one or several nodes. In [10] a library of BNs is proposed. Here we can make
use of our description when creating the library and using this library for MEBN construction. Our aim is to create this
ontology for several purposes. Firstly, the ontology would facilitate the process of combining of different MEBN
fragments in a consistent manner. Secondly, the use of ontology for MEBN is when we apply rules specified on
ontological level. The rules support process of connecting between levels. This process depends on plan nodes and
current context. E.g. by using the superior of rule we discern agents on different decision (abstraction) levels in the
tactical plan recognition problem.
State description can be represented by using suitable network fragments. We classify those fragments as temporal,
spatial and pattern dependent. Conditioned on type, different network fragments containing nodes that represent
patterns, temporal and spatial data are used for plan recognition. In that manner knowledge is reused and combined in a
flexible manner. Therefore we claim that our model supports plan recognition in a generic manner.
MEBN ontology involves the utility class. It is used as a framework for connection between explicit utilities and plan
alternatives. In contrast to influence diagrams [11] utility nodes in MEBN have influence (backwards); in our conceptual
division for generic tactical plan recognition utility nodes have backward influence plan alternatives. The main
assumption is that the agent maximizes its utility. Our prior knowledge is the degree to which we rely on explicit utility
calculation. Our approach is to use calculated expected utilities for each plan alternative and enter this result as evidence
in nodes representing plan utility. Calculations of utilities for each plan alternative can in some cases be calculated by
fuzzy functions. The reason why we use a fuzzy representation is that we are assumed to have incomplete knowledge on
agent’s (opponent’s) utility calculation.
Different network fragments (classes) can have their validity depending on abstraction level. E.g. a model that is
applicable at platoon level may not be applicable at battalion level. However, in some cases network fragments can be
instantiated at different abstraction levels. In these cases it is important to discern what types of fuzzy functions are
appropriate for feeding this network, see Figure 1.
For each abstraction level we combine different BN fragments conditioned on type, i.e. aggregate. This combination of
fragments has to be extended by introducing the context. It depends on various attributes and their relations. In our
problem of tactical plan recognition we use different fragments depending on relations between the (hostile) agent and:
1) environment
2) own force attributes (positions, lethality)
3) user of plan recognition
Considering the first case, environment contains in our case representation of terrain and weather. Spatial pattern
recognition of tactical maneuvers representing grass field doctrines is not of use if our observations state that the agent is
moving along a road. The second case considers own force versus enemy relation. Depending on distance, i.e.
depending on own force positions we use different MEBN models. If the distance to reach us is long we use a fragment
that takes temporal aspect into account such as value of expected time to impact and its first derivate. In the final case
there are different kinds of users on different decision levels. More complex, accurate and slower MEBN models can be
used by an analyst than by a company commander who needs timely information in the first place. The user should be
allowed to choose which data and/or patterns have to be taken into account.
When constructing a (large scale) network from fragments the problem of combining different Conditional probability
tables (CPTs) may occur, i.e. we are in a situation where we have to model (large in some cases) CPTs from scratch.
Such a situation occurs when there are many (new) parents to one child node. Instead of defining a whole new CPT, we
can define relative influence that we represent as relative weights. The assumption of coherent knowledge frame has to
be satisfied [12].
Let us say that we have a CPT, P(Y| X1) , of a child node Y given parent node X1 and other network entity class of P(Y|
X2). When we want to add a fragment node(s) X2 to the first fragment we use relative weights on relative influence.
P(Y| X1, X2) = w1*P(Y| X1) + w2*P(Y| X2)
where w1 + w1 = 1
Consequently, we do not need to define all possible CPTs for all possible combinations of Bayesian network fragments.
Instead, we can define relative weights. Such approach could be valuable for MEBN concept and, in the next step, useful
for tactical plan recognition.
4. EXAMPLE MODELS OF NETWORK FRAGMENTS
We see a description of a network fragment in figure 4. It consists of two parts spatial and temporal data. Nodes that
represent temporal data are the time to impact node and its change. The spatial data part is represented by Direction
node. A number of attributes can be used to describe this particular network fragment. We can define applicability of
model by defining its validly property. It spans range (n to n+2 in this example) for which abstraction levels our ontology
type :State with name, bfName, is valid.
: State (name: bfName, validity range: [n, n+2])
: Temporal Data
: Spatial Data
Figure 4 A example of state class network fragment
:Plans (name: bfTactical )
Abstraction level = 4
Superior of: allCausaly
Restrictions: none
Abstraction level = 3
Abstraction level = 2
Abstraction level = 1
Figure 5 Network fragment describing plan structure in an organization
In Figure 5 a network fragment containing plan alternatives is presented at different decision (abstraction) levels. At the
top in this model is battalion. Plans on battalion level have influence on all decision levels. We say that a battalion is
superior to company, platoon and group level. By defining the rule “superior to” we underline that causal influence in
class plan is the same as the “superior to” relation. We can define restrictions. In multi-agent instance case a node on a
certain decision (abstraction) level n is parent to several lower level nodes, on level n-1, see [3]. E.g. a company that
consists of three platoons is represented in DBN as Company (parent) node pointing to three platoon (child) nodes.
Models that evaluate utility of plan alternatives can be used in our generic model as well. If we assume that an agent is
rational then it will maximize its own utility. However, we have uncertainty in the validity of our model, i.e. that our
estimate of an agent’s utility functions approximately reflects the agent’s utility functions. We motivate modeling
agent’s explicit utilities by assuming that it is in some cases possible to capture part of that knowledge. Approaches how
to model reasoning about other agents (explicit) utilities can be embedded simulations, fuzzy functions and more refined
approaches within the field of game theory [13, 14]. The results are entered into nodes that represent plan alternatives.
We use BNs uncertain causal connections to express our degree of trust that the utility model is really valid and the agent
uses an approximately similar utility function for the plan alternatives.
:Utility (Name = Utl_Plt., validity range = 2)
Plan Space of Platoon
{Attack, Defend, Reconnaissance, March}
Origin
:simulation
Origin
:fuzzy utility functions
Figure 6 A utility fragment description (right) and an instance of it (left)
On the left side of Figure 6 we have description of a network fragment of utility class. Concerning validity range
(validity range = 2) this network fragment is only applicable on platoon level. We have defined for each platoon
alternatives {Attack, Defend, Reconnaissance, March} and corresponding utility nodes. Each of these
nodes has probability values {High, Low}. The interpretation is the probability that a certain plan alternative is/will
be chosen by an agent given explicit utility functions. E.g. if node utility of a plan alternative attack’s value High is
100% then certain influence is propagated backwards to the plan node Platoon. We see that value for Attack is
therefore higher (56%) than the value of any other alternatives. In most cases it could be difficult to model functions for
calculation of expected utilities for each plan alternative. E.g. if we do not have fuzzy utility functions we can from our
fragment Utl_Plt remove nodes that originate from fuzzy utility functions, see Figure 6, but on the other hand keep
Attack node.
5. A GENERIC MODEL OF TACTICAL PLAN RECOGNITION FOR THREAT ASSESSMENT
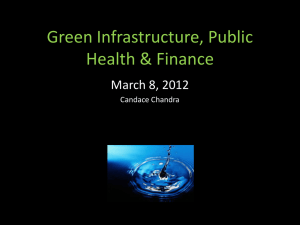
With our generic model of tactical plan recognition for threat assessment in Figure 7 we represent the state of the
enemy’s units, our current observations on different abstraction levels. The number of levels is n in the figure. By
abstraction level we mean the level of discernment interesting for the current user (military commander) and/or the
decision level in the opponent’s structure. MEBN with proper ontology offer flexibility beyond hierarchical modeling in
a consistent manner. Moreover, a trend in military operations worldwide is a flexible organization implying flexible
decision structures for solving particular tasks. Therefore, we deliberately avoid the use of the term “hierarchical level”
and see this case as a subset of “abstraction level”. In this manner, we can express various multi-agent organizations and
their plans, see [21] and [22], with the corresponding network fragments describing plan structures.
Bayesian networks can be used for modeling temporal dependencies. Temporal Bayesian Networks are called Dynamic
Bayesian Networks (DBN). The structure of a DBN contains a number of copies of the same BN connected by causal
relations that represent temporal dependency. Note that the DBN does not change its structure over time. Therefore a
more convenient designation should be Temporal Bayesian Networks. However, by introducing MEBN whose
generation process is based on aggregation the structure of the network can be changed dynamically. The higher
abstraction level the more influence plan estimates have on previous steps on current plans. An agent of size battalion is
represented at higher abstraction and its plans do not change as fast as the actions (movement) of a single tank unit. A
battalion agent’s interrelations and size are reasons for this inertia over plan space. On the other hand simple actions of
tank unit agent could be assumed to have insignificant temporal dependency.
A DBN structure can be used in information fusion for representing situation and connecting it to the plan recognition.
On the right side of the network we have state structure. It will be affected depending on which plans we use,
environment, force balance of the battlefield and our estimate about the enemy’s situation awareness as for instance the
enemy’s ability to perceive us. In the middle of our generic model we represent plan (multi-agent) structure. We assume
that each plan has one or more goals that are represented as distributions in DBN. Plans at the current time step are
dependent on plans that are generated in the previous time step. That affects the ability to change plans in current step.
E.g. it can be hard to stop attack and march in convoy from battlefield. Having large scale’s organizations inertia in
mind, the lower the level of plan hierarchy, the weaker the time influence. It is assumed that the latter totally disappears
at action level. In other words, an action only depends on the plan on the higher level.
Figure 7 A Generic Model of Tactical Plan Recognition for Threat Assessment
6. DISCUSSION
By using our ontology for MEBN we can build flexible and reusable representations of multi-agent structures. Effective
simulation methods such as stochastic simulations could be used to estimate (predicted) utilities of the agent (opponent).
Consequently, we can construct models like in [1], but here we have states and utility on various abstraction levels.
Instead of representation where the state is connected only on lowest abstraction level as in AHMEM we introduce an
enriched flexibility where at each abstraction level we can deal with certain state representations (aggregated patterns).
That means that an observation of a state on higher abstraction level can be directly used for plan recognition. The other
advantage with our model is that state estimate can be propagated automatically (disseminated) to lower abstraction
levels.
ACKNOWLEDGMENTS
I would like to express my thankfulness for reviewing this paper to Dirk Brade(FOI), Per Svensson
(FOI), Stefan Arnborg (KTH), Ronnie Johansson (KTH) and Joel Brynielsson (KTH).
REFERENCES
1.
H. H. Bui, A general model for online probabilistic plan recognition, 18th International Joint Conference on
Artificial Intelligence (IJCAI-2003), Acapulco, Mexico, 2003.
2.
K.B. Laskey, MEBN: First-Order Bayesian Logic for Open-World Probabilistic Reasoning,
http://ite.gmu.edu/~klaskey/publications.html, George Mason University Department of Systems Engineering
and Operations Research, US, 2004.
3.
Robert Suzić, Representation and Recognition of Uncertain Enemy Policies Using Statistical Models, In
Proceedings of the NATO RTO Symposium on Military Data and Information Fusion, Prague, Czech Republic,
October 2003.
4.
Robert Suzić, Generic Representation of Military Organisation and Military Behaviour: UML and Bayesian
Networks, In Proceedings of the NATO RTO Symposium on C3I and M&S Interoperability, Antalya, Turkey,
October 2003.
5.
Robert Suzić, Knowledge representation, modelling of doctrines and information fusion, In Proceedings of the
CIMI conference, Enköping, Sweden, May 20-22, 2003.
6.
A. J. Pfeffer, Probabilistic Reasoning for Complex Systems, Stanford University, US. March 1999.
7.
S. Mulgund, G. Rinkus, C. Illgen, & J. Friskie, OLIPSA: On-Line Intelligent Processor for Situation
Assessment. Second Annual Symposium and Exhibition on Situational Awareness in the Tactical Air
Environment, Patuxent River, MD, US, 1997.
8.
W. Mao, J. Gratch, A Utility-Based Approach to Intention Recognition, Workshop on Agent Tracking:
Modeling Other Agents from Observations, at the AAMAS 2004.
9.
W. Mao, J. Gratch, Decision-Theoretic Approach to Plan Recognition, ICT Technical Report ICT-TR-01-2004.
10. S. Das, R. Grey, P. Gosalves, Situation assessment via Bayesian belief networks, In Proceedings of the 5th
International Conference on Information Fusion, pp. 664-671, Minneapolis, US, 2002.
11. R. A. Howard and J. E. Matheson, Readings on the Principles and Applications of Decision Analysis, pp
721—762, Strategic Decisions Group, Menlo Park, CA, US, 1984.
12. B. Das, Generating Conditional Probabilities for Bayesian Networks: Easing the Knowledge Acquisition
Problem, In Journal CoRR cs.AI/0411034, 2004.
13. J. Brynielsson, Game-Theoretic Reasoning in Command and Control, In Proceedings of the 15th Mini-EURO
Conference: Managing Uncertainty in Decision Support Models (MUDSM 2004), Coimbra, Portugal,
September 2004.
14. K. Wallenius, Generic Support for Decision Making in Management and Command and Control, Licentiate
Thesis, Nada, Royal Institute of Technology, Stockholm, Sweden, 2004.
15. H. Kautz, A formal theory of plan recognition and its implementation, In J. Allen, H. Kautz, R. Pelavin, and J.
Tenenberg, editors, Reasoning about Plans, pages 69-125. Morgan Kaufman, San Mateo, CA, US, 1991.
16. M. E. Pollack, Plans as Complex Mental Attitudes, Intentions in Communication, 1990.
17. J. Pearl, Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference, Morgan Kaufmann
Publishers, Inc., US, 1988.
18. F. V. Jensen, An introduction to Bayesian Networks, UCL press, London, ISBN: 1-85728-332-5, 1996.
19. K. P. Murphy, Dynamic Bayesian Networks: Representation, Inference and Learning, University of California,
Berkeley, US, 2002.
20. M. Eklöf, P. Hörling, P. Svan, R. Suzić, C. H. Yi, Information and Knowledge Management for Network Based
Intelligence (NBI), Swedish Defence Research Agency (FOI), User Report, FOI-R--1417--SE, Stockholm,
Sweden, 2004.
21. S. Intille and A. Bobick , A framework for recognizing multi-agent action from visual evidence, In National
Conference for Artificial Intelligence, 1999.
22. S. Saria and S. Mahadevan, Probabilistic Plan Recognition in Multiagent Systems , International Conference on
AI and Planning Systems (ICAPS), 2004